反导作战体系超网络模型与交互机制研究*
2022-07-11 09:01:46罗剑于小红姜伟王杰娟陈小卫
现代防御技术 2022年3期
罗剑,于小红,姜伟,王杰娟,陈小卫
(航天工程大学,北京 101416)
0 引言
基于信息网络的反导作战运用具有时效性要求高、信息依赖性强、指挥控制活动紧促、作战体系复杂等特点,而复杂网络理论以其整体性建模特点为反导作战研究提供了新的方法[1]。反导作战体系运用流程中包括指挥控制单元、传感器单元、作战单元、信息处理与传输单元及其作用交互关系,从作战体系的整体角度出发,反导作战体系运用流程交互机制研究对于搜寻体系网络关键路径、提升网络稳定性和抗毁性具有重要的理论意义。
目前,国内外运用复杂网络理论进行作战体系研究的主要是构建反映真实作战体系特性的网络描述模型和研究作战体系动态演化过程中的网络动力学机制;文献[2]提出利用复杂网络思想研究分布式网络化作战,并根据作战单元异质连接关系建立网络;文献[3]将复杂网络理论提出了FINC(作战单元、情报、网络和指挥控制)军事网络分析方法,运用Agent 建模中,给出了网络效能度量方法;文献[4]针对作战体系中异质节点及交互关系,构建了包含物理域、信息域和认知域三层网络的体系作战超网络模型,并研究了指挥过程中信息交互路径及特征,提出了基于作战环的体系作战同步模型;文献[5]提出体系作战信息流转超网络概念,构建了由物理层和逻辑层组成的分层网络结构,文献[6]提出了区域防空作战体系结构“两层四网”超网络建模方法,分别从纵向结构关系和横向映射机制量化研究体系内部运行机理;文献[7]以区域反导体系结构为研究对象,结合超网络概念,建立了包含物理层、逻辑层和效用层网络的区域反导体系结构超网络模型框架;文献[8]以美国空天防御作战指挥体系为例,建立了复杂网络模型,并对指挥效能和结构关系进行了研究。上述研究成果从当前的研究现状看,还存在以下不足之处:①仅考虑作战要素间静态隶属连接关系生成的作战体系网络模型而忽略了作战要素之间连接的动态连接属性;②对网络单元之间的交互机制研究不够,尤其是基于作战阶段时序动态交互机制。
为此,本文以超网络理论为切入点,建立了反映作战体系现实复杂网络特性的反导作战体系运用流程超网模型,重点分析网络模型静态交互机制和基于作战阶段时序的动态交互机制,构建反映动态特性演化的网络特征指标,最后给出了仿真实验并对仿真结果进行了分析,为反导作战体系作战运用流程网络结构优化提供理论指导。
1 反导作战体系网络模型
反导作战体系是以交战、指控、通信、感知和融合类实体为节点,以能量、信息和认知交互为边的复杂网络,即美国Sheffi 提出的“网络的网络”—“超网(supernetwork)”[9]:由多种连接方式将多种类型节点连接起来,构成强调整体功能的多重边异构网络[10]。基于此,将反导作战体系划分为“三域四网”:认知域上的指控子网、信息域上的信息子网和物理域上的交战子网、传感探测子网。
1.1 指控子网
认知域上的反导指控子网是由国家级、战区级、作战部队指挥机构构成的网络,是由物理域指控节点进行态势感知、判断决策、指挥控制等过程在认知域的映射,为三元组有向网络:

式中:VD表示认知域中指控节点的集合,为非空有限集;FD表示指控节点的属性集合,主要是指挥层次(战略级、战役级、战术级)、指挥类型(情报、控制、评估)、指令形式(预警、目标识别、发射);ED表示节点之间的指挥关系。
1.2 信息子网
信息域上的反导信息子网是由数据处理节点VP和通信节点VC构成的网络,为三元组有向网络:

式中:VI=VP∪VC表示数据处理节点和信息传输节点集合,为非空有限集;FI表示信息节点的属性集合,包括信息阈值(出、入度不超过某一常数)、节点功能(数据融合、信息传输、信息处理、信息中继)、信息类型(指挥、态势、评估)、信息形式(文电、语音、数据、图像);EI表示节点之间的信息流转关系。
1.3 交战子网
物理域上的反导交战子网是由反导武器VW、敌方目标VT等火力打击节点构成的网络,为四元组有向网络:

式中:VW=(VW1,VW2,L,VWn)表示我方作战实体的节点集合,为非空有限集;FA表示交战节点的属性集合,包括导弹类型(中段、末段高层、末段低层)、功能需求(发射指令与制导信息同时接入时才能与目标节点产生联系);VT=(VT1,VT2,L,VTn)表示敌方作战实体的节点集合,为非空有限集;EA⊆VW×VT表示VW和VT之间的交战关系。
1.4 传感子网
物理域上的传感子网是由预警节点VR和制导节点VG构成的网络,为三元组有向网络:

式中:VO=VR∪VG,VR=(VR1,VR2,L,VRn)表示预警实体的节点(如预警卫星、远程预警雷达等)集合,为非空有限集;VG=(VG1,VG2,L,VGn)表示制导节点(制导雷达)集合,为非空有限集;FO表示传感节点的属性集合,包括功能类型天基预警、地基预警、跟踪识别等;EO表示传感节点与其他节点的目标数据共享关系。
1.5 超网络模型
基于上述子网模型的分析,借鉴复杂网络作战体系研究成果,构建反导作战体系超网模型如下:
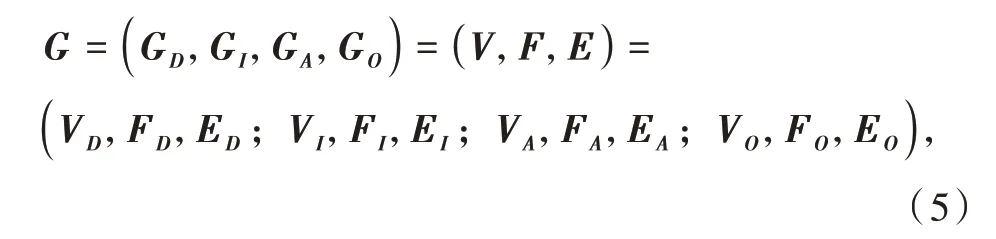
式中:V=VD∪VI∪VA∪VO表示反导作战体系中所有节点集合;F=FD∩FI∩FA∩FO表示节点功能属性集合,决定了节点交互的属性和约束条件;E=ED∩EI∩EA∩EO表示节点之间的耦合关系,决 定 了 节 点 交 互 的 方 向 ; 且VD∩VI∩VA∩VO= ∅,F和E共 同 决 定了 连 边 规则。反导作战体系超网模型示意图如图1 所示。
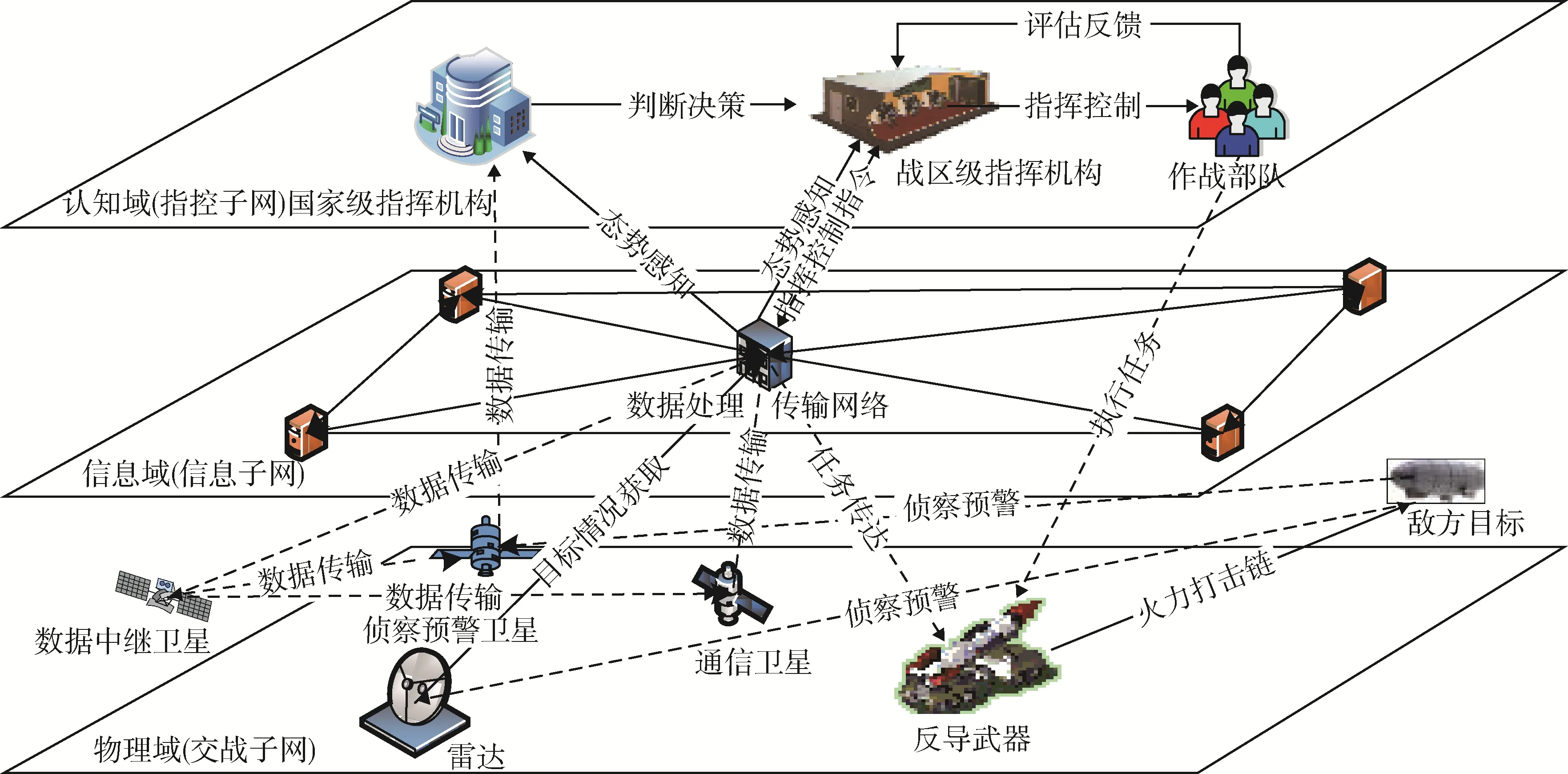
图1 反导作战体系运用流程超网模型示意图Fig.1 Illustration of supernet model of anti-missile operation system-of-systems
指控子网中国家级、战区级指挥机构多源获取目标信息,将融合态势信息推送到战区级决策指挥人员,经威胁判断,指挥员下达作战命令给作战部队,由作战部队协同控制武器单元完成作战任务,并将评估结果反馈给指挥员由其决定是否二次拦截。信息子网实质起到“桥梁”作用,将指控信息、态势信息、评估信息等通过地基链路或卫星通信链路的方式网络化传输。传感子网通过获取来袭导弹精确弹道数据和真假目标识别完成对拦截弹制导控制,并对拦截效果进行评估。交战子网中武器单元通过诸元解算、拦截发射、目标捕获、拦截杀伤等一系列动作摧毁来袭导弹。
2 反导作战体系网络模型静态交互机制
静态交互机制主要反映反导作战体系运用流程组织结构的隶属编成关系及体系网络拓扑关系。
2.1 静态交互机制
(1)子网内部交互机制
指控子网内部主要为国家级指挥机构、战区级指挥机构、作战部队之间的指挥层次关系映射,即指挥机构指挥关系(按级指挥和越级指挥)、协同等关系;信息子网内部主要是态势感知信息与信息传输关系,该网主要共享数据中继与通信卫星、卫星地面站、数据处理中心、指挥网等态势感知信息,栅格化传输指控信息、态势信息、评估信息等;传感子网内部主要为传感探测、制导单元之间的目标数据信息融合和共享关系,包括敌来袭目标位置、速度、弹道轨迹等,实现预警信息共享,多层探测单元的接力,协同对目标的有效识别与精确跟踪;交战子网内部主要是敌我双方作战目标之间作战关系,即拦截弹瞄准、跟踪、锁定、摧毁敌导弹的过程映射关系。
(2)子网之间交互机制
指控子网主要接收信息子网的融合态势感知信息,并向信息子网发送指控信息;交战子网主要接收指控子网的部分指控信息和通过信息子网传输的部分指控信息,接收传感子网发出的制导信息,并向传感子网发送目标打击信息;信息子网接收指控子网的指控信息、传感子网的态势信息和交战子网的目标打击信息,并向指控子网发送融合态势信息,向交战子网传输指控信息,向传感子网传输指控信息;传感子网获取交战子网的目标信息及目标打击信息,通过信息子网向指控子网发送态势信息,向交战子网发送制导信息,引导反导武器打击目标。
四个子网内部及之间的交互关系如图2 所示。
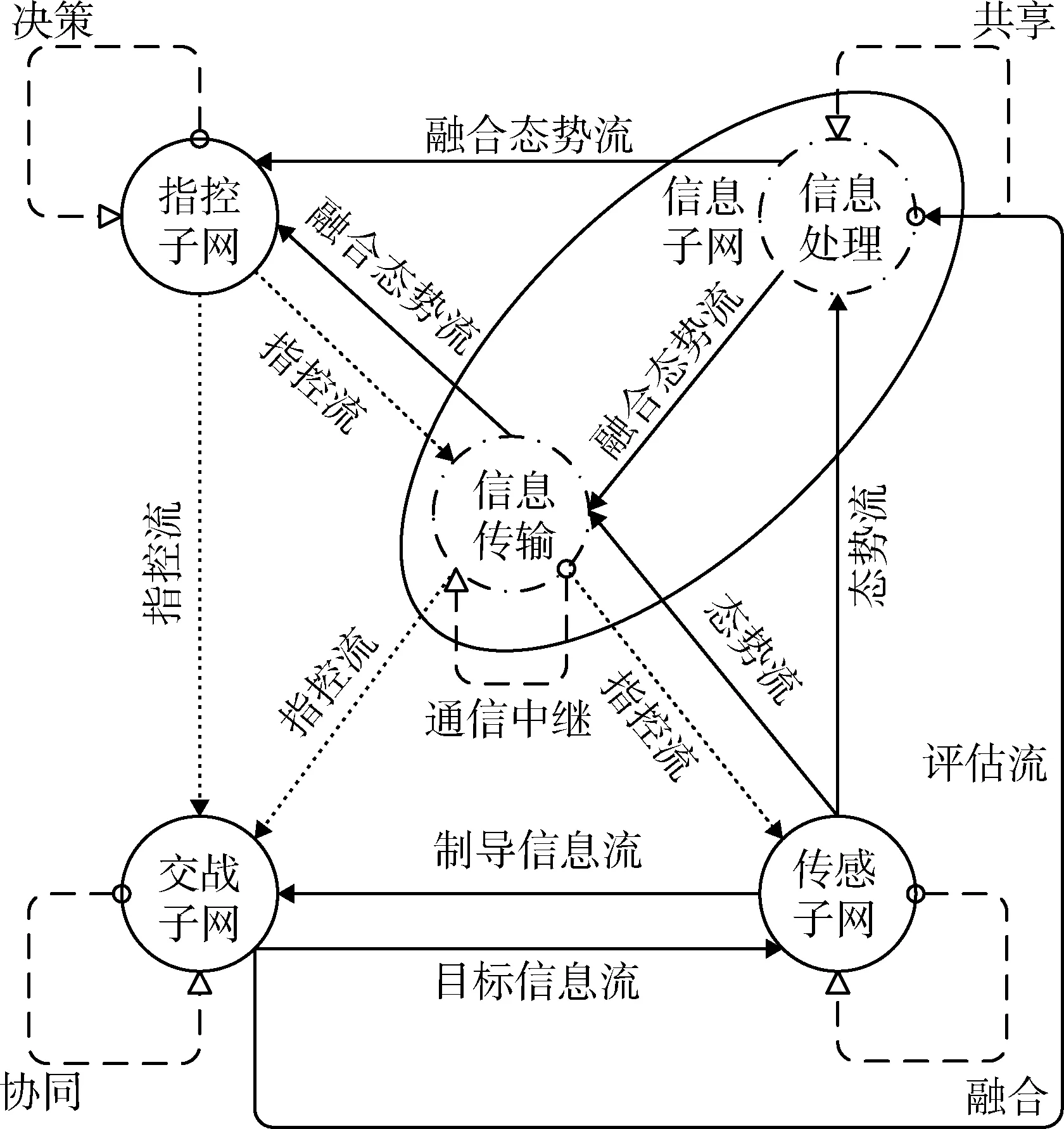
图2 “三域四网”交互示意图Fig.2 Illustration of interaction of“three domain and four network”
从图中可以看出,指控子网、信息子网、传感子网、交战子网主要功能分别为决策、共享与中继、融合、协同、交战。指控子网与交战子网为单向交互(发送指令);信息子网与其他三网为双向交互(传递指控流,共享态势流);传感子网与信息子网为双向交互(推送态势流、接收指控流),与交战子网为双向交互(获取目标信息流,向武器单元推送制导信息流)。
2.2 超网模型交互关系描述
反映在超网模型中,交互关系表示为节点之间的连边,如文献[5]将指挥节点和指挥关系抽象分别构成网络的节点和连边,文献[7]将区域反导体系结构物理关系连边、信息关系连边、能力关系连边分别抽象成二元关系表示。本文将节点二元关系表示为边集和属性集的交集,即Φ = ΦE∩ΦF。如果边集E=ED∩EI∩EA∩EO存在二元有向关系ΦE,属性集F=FD∩FI∩FA∩FO存在二元有向关系ΦF,则:
式中:ΦE(Vi,Vj) = 1 表示节点Vi和Vj连边之间的二元关系ΦE(Vi,Vj)存在,ΦE(Vi,Vj) = 0 表示连边不存在二元关系;同理,ΦF(Vi,Vj) >0 表示节点Vi和Vj存在二元关系,ΦF(Vi,Vj) = 0 表示不存在二元关系。需要说明的是,如天基预警卫星与来袭导弹存在连边EI,但属性集连边FI不一定存在,天基预警卫星是靠捕获目标红外特性进行,在目标进入关闭助推发动机后,ΦF(Vi,Vj)不存在。

(1)若二元关系Φ1存在
∀Vi,Vj∈V,若Φ1(Vi,Vj) >0,且Φ1(Vj,Vi) >0,则任意两个同质节点之间可以互相传递信息,二元关系具有双向性;否则,只能单向传递。这里的Φ1表示子网内部交互关系(协同、决策、同享、融合),为双向弧。
(2)若二元关系Φ2存在
∀Vi∈VD,∀Vj∈VI∪VA∪VO,且Vi≠Vj,若Φ2(Vi,Vj) >0,且Φ2(Vj,Vi) = 0,则指控信息流只能通过指控节点发出且不能逆向传递,二元关系具有单 向 不 可 逆 性。另,∀Vk∈VD,且Vi≠Vj≠Vk,若Φ2(Vi,Vk) >0,则若Φ2(Vj,Vk) = 0,即不同受控节点在同一时间点上不能受两个指控节点控制,二元关系具有唯一性。这里的Φ2表示指控子网与其他子网之间的交互关系(指控流),为有向弧。
(3)若二元关系Φ3存在
∀Vi∈VI, ∀Vj∈VD∪VA∪VO, 且Vi≠Vj,Φ3(Vi,Vj) >0,且Φ3(Vj,Vi) >0,则信息处理与传输节点与其他子网节点之间二元关系具有可逆性。这里的Φ3表示信息子网与其他子网之间的交互关系(指控流、态势流、评估流),为双向弧。
(4)若二元关系Φ4存在
∀Vi∈VA, ∀Vj∈VD∪VI∪VO, 且Vi≠Vj,Φ4(Vj,Vi) >0,且Φ4(Vi,Vj) = 0,则火力打击节点与指控、信息、传感子网节点之间只能单向接收传递,二元关系具有单向不可逆性。这里的Φ4表示交战子网与其他子网之间的交互关系(态势流),为有向弧。
(5)若二元关系Φ5存在
∀Vi∈VO, ∀Vj∈VD∪VI∪VA, 且Vi≠Vj,Φ5(Vi,Vj) >0,且Φ5(Vj,Vi) >0,则传感节点与其他子网节点之间的二元关系具有双向可逆性。这里Φ5的表示传感子网与其他子网之间的交互关系(态势流、制导信息流、评估信息流),为有向弧。
假设反导作战体系超网络中由m个指控节点VD组成的GD、n个信息节点VI组 成的GI、l个传感节点VO组成的GO、h个火力节点VA组成的GA,从而可以构建出反导作战体系静态交互机制下的网络模型的邻接矩阵:

式 中;EDD×FDD,EII×FII,EOO×FOO,EAA×FAA分 别表 示 子 网 内 部GD,GI,GO,GA交 互 关 系;EID×FID,EOD×FOD,EAD×FAD分别表示 节 点 与GD,GI,GO,GA之间的耦合交互关系。
3 反导作战体系动态网络交互机制
本文界定基反导作战体系作战流程为从发现来袭弹道导弹发射到导弹被摧毁的过程。美军弹道导弹防御计划分为助推段防御、中段防御和末段防御[11],其交战程序分为探测、跟踪识别和火力打击3 个阶段[12-14]。国内学者多将反导作战流程预警探测、跟踪识别和打击评估3 个阶段[15-16]。为了更好体现反导作战流程中指挥流、信息流的流向,将该流程划分为天基预警探测、粗探测识别、精密跟踪识别、拦截打击和效果评估等4 个阶段。
3.1 基于作战阶段时序网络动态交互机制
在反导作战体系运用流程复杂网络中,由于各节点指控方式、指挥体制、级别权限、物理属性、时空的制约,在不同的作战阶段,该网络呈现拓扑时变特性,见图3。
图3 中,黄色节点表示指控节点类;绿色节点表示传感节点类;红色节点表示信息节点类;蓝色节点表示火力打击节点类。
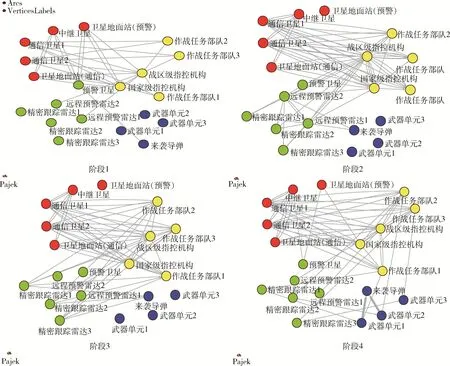
图3 反导作战体系多阶段动态网络演化示意图Fig.3 Illustration of multi-stage dynamic network evolution of anti-missile operation system-of-systems
阶段1:天基预警探测阶段。高轨预警卫星采用红外探测敌反射的弹道导弹,跟踪喷焰的红外特性,将态势情况经数据中继卫星到卫星地面站或直接由卫星地面站传至反导作战指挥机构(国家级和战区级);战区级指控机构根据弹道数据初步估计弹道轨迹和落点范围,下发拦截准备指令到各作战任务部队,同时通过卫星地面站下达指令给预警卫星和远程预警雷达,做好弹道导弹数据共享和交接班准备。
阶段2:粗探测识别阶段。来袭目标进入远程预警雷达探测范围后,预警卫星完成探测任务,远程预警雷达持续探测目标,初步测量弹道数据并向指挥机构(国家级和战区级)传送目标信息;战区级指控机构修正拦截指令下发到各作战任务部队,同时下达指令给远程预警雷达和精密跟踪雷达,做好弹道导弹数据共享和交接班准备。
阶段3:精密跟踪识别阶段。来袭目标进入精密跟踪探测雷达范围后,由其进行搜索、捕获目标后,实时上传精确弹道数据,作战任务部队指控机构根据情报信息和战场态势确定火力分配方案,上报方案至国家级和战区级指控机构。
阶段4:拦截打击和效果评估阶段。作战任务部队选择时机给反导作战单元下达拦截指令,作战单元接受作战指令,注入拦截指令,发射拦截武器;精密跟踪雷达引导武器单元进行拦截;作战任务部队实时上报作战态势,国家级和战区级指挥机构根据远程预警雷达和预警卫星持续监视作战空域,评估拦截效果,确定是否实施再次拦截。
3.2 网络特征指标
为了描述反导作战体系静态网络拓扑特性,可以用度、介数、网络密度、平均路径长度、介数中心度、度数中心度等[9]描述,而反导作战体系的运用流程中不同阶段中,节点之间的耦合交互关系不同,且边的权重和值也不同,故通过对这四个阶段的时间动态网络分析,分析各阶段子网内部与子网之间的网络演化,探索出子网内部关系、子网之间交互联系以及节点的角色和地位等方面的变化。
(1)网络密度(ND)
网络密度(network density)是网络中实际存在的关系数除以理论上的最大关系数,密度越大表示网络节点之间的联系越紧密,该网络对其行为产生的影响就越大。
式中:l为网络中实际连接的边数;N为各阶段实际网络节点数。
(2)平均路径长度L
网络的平均路径长度L是连接网络内2 个节点之间最短关系链中的平均节点个数,平均路径越短,网络内信息传递速度越快,互动能力越强。

式中:dij为网络节点i、j之间最短路径上的边数;N为各阶段实际网络节点数。
(3)介数中心度(BC)
介数中心度(betweenness centrality)考察反导作战体系网络中个组织机构地位演化变化情况。中心度是节点对网络资源的控制程度,表示该节点在多大程度上控制其他节点的交往,即,节点作为“桥”存在的能力。

式中:σij(k)为经过节点Vk的节点Vi到Vj的最短路径数;σij为节点Vi到Vj的最短路径数。
(4)度数中心度(DC)
度数中心度(degree centrality)考察反导作战体系网络中个组织机构角色演化变化情况。因网络规模不固定,这里用相对法来计算即可。节点的度数中心度是指与该点直接相连的其他节点个数,某节点度数最高说明该节点居于网络的中心。

式中:din(vi)、dout(vi)分别为节点Vi的出度、入度;N为各阶段网络节点数。
4 仿真实验及结果分析
为了验证本文提出的反导作战体系运用流程网络模型合理性,以区域反导为例,构建一个简单的基于信息系统的反导作战体系,包含5 个指控节点、5 个传感节点、6 个信息节点和4 个火力节点(见图4)。基于Pajek 软件[17]可视化分析和Matlab 计算网络特征参数,设置3 类Line Value 以区分信息流linfor、物质流lmat和指控流lcom(分别用绿色、黑色和红色表示),根据第4.1 节分析,在Pajek 中temporal network 模块中设置了时序步数(interval)设置为40。
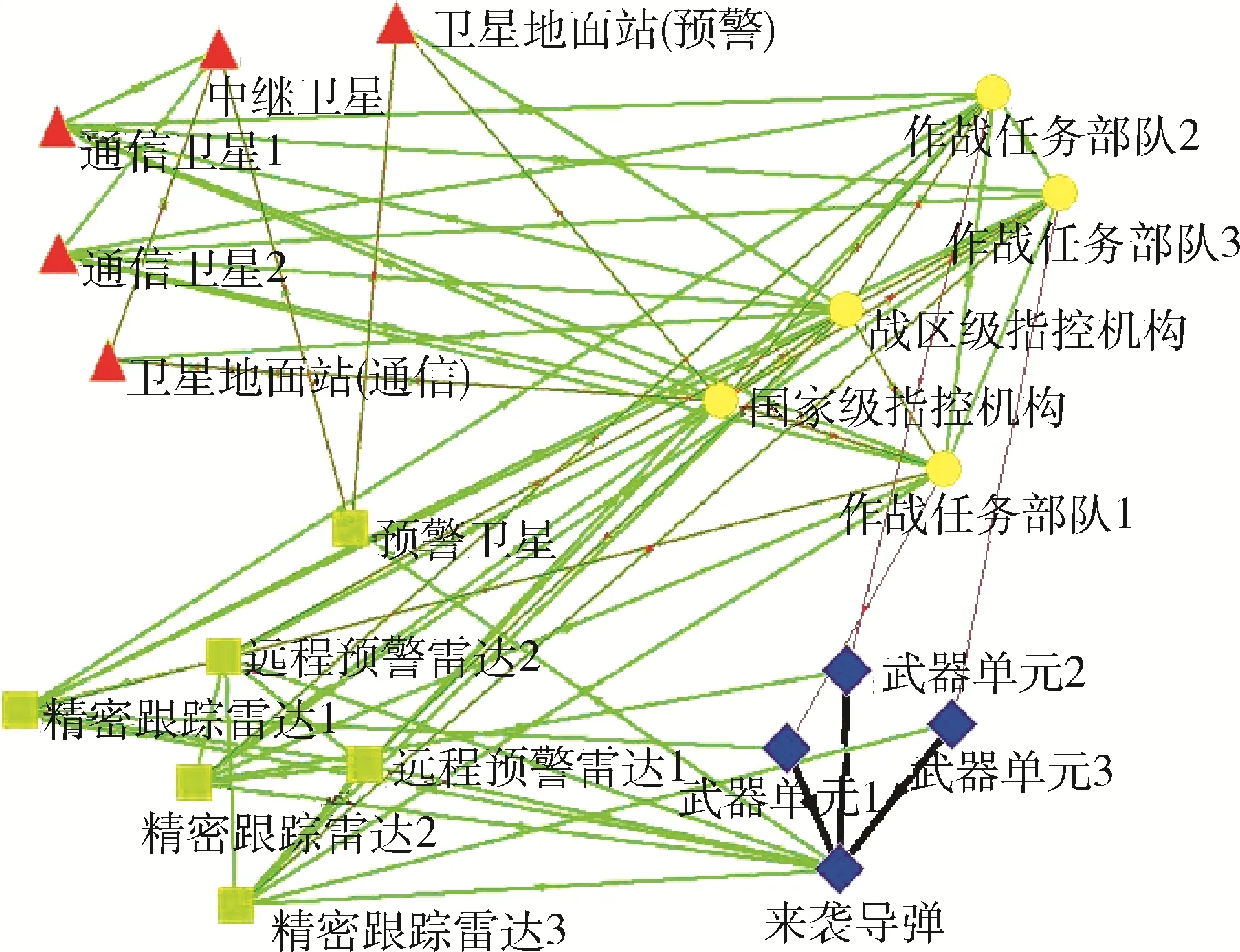
图4 反导作战体系静态网络拓扑图Fig.4 Static network topology of anti-missile system-ofsystems
根据第4.2 节提出的网络指标进行计算,得到反导作战体系网络特征指标值(见表1),及各个节点在不同作战阶段的动态网络演化(见图2,3)。可以看出随着作战阶段的发展,网络密度等网络整体特征值呈阶段性变化。
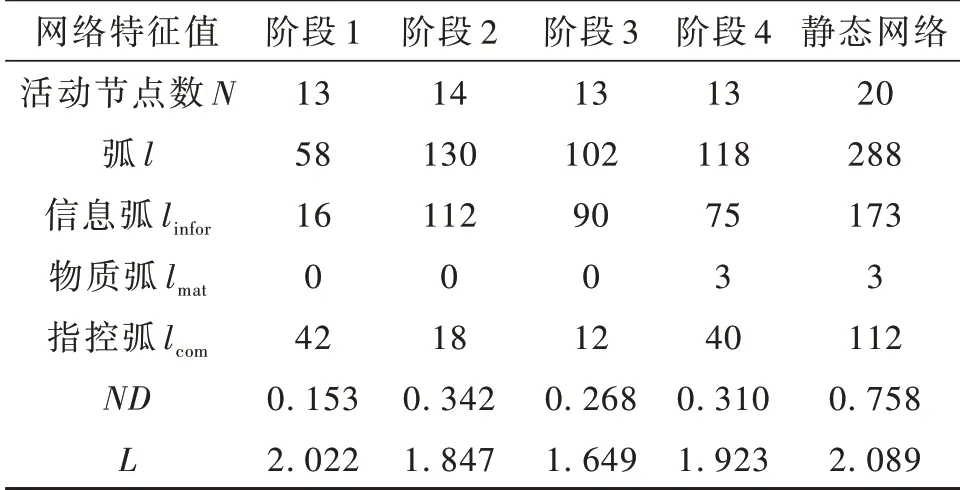
表1 反导作战体系多阶段动态网络特性指标值变化Table 1 Variation of multi-stage dynamic network characteristic index of anti-missile operation system-ofsystems
从表1 可以看出,指控信息流随着作战阶段的推进明显比例在下降,这是由于作战初期,需要指控机构收发指令进行大量的协调组织工作,进入阶段2、3,只有在传感节点进行交接班时需要少量的指控信息外,大部分工作由各节点自组织、自协调进行,进入阶段4,由于作战评估的需要,指控信息比率略有上升。
从节点的入度、出度、介数、度数中心性、介数中心性等网络特征参数入手,深入分析各节点在不同作战阶段呈现出的变化,可以其角色和地位随着阶段性任务的变化而变化。从图5,6 可以看出,节点2 战区级指控机构节点中心度、介数中心度在4个阶段中一直处于高位,说明在区域反导作战过程中由于职能和任务的需要,需要大量的协调组织和指挥控制工作,角色和地位最高;节点14~16 是信息传输节点,在4 个阶段中也处于较高位置,说明在基于信息系统的反导作战体系中信息传输节点是支撑其的关键节点。

图5 各节点不同阶段度数中心度变化图Fig.5 illustration of variation of degree centricity of each node at different stages
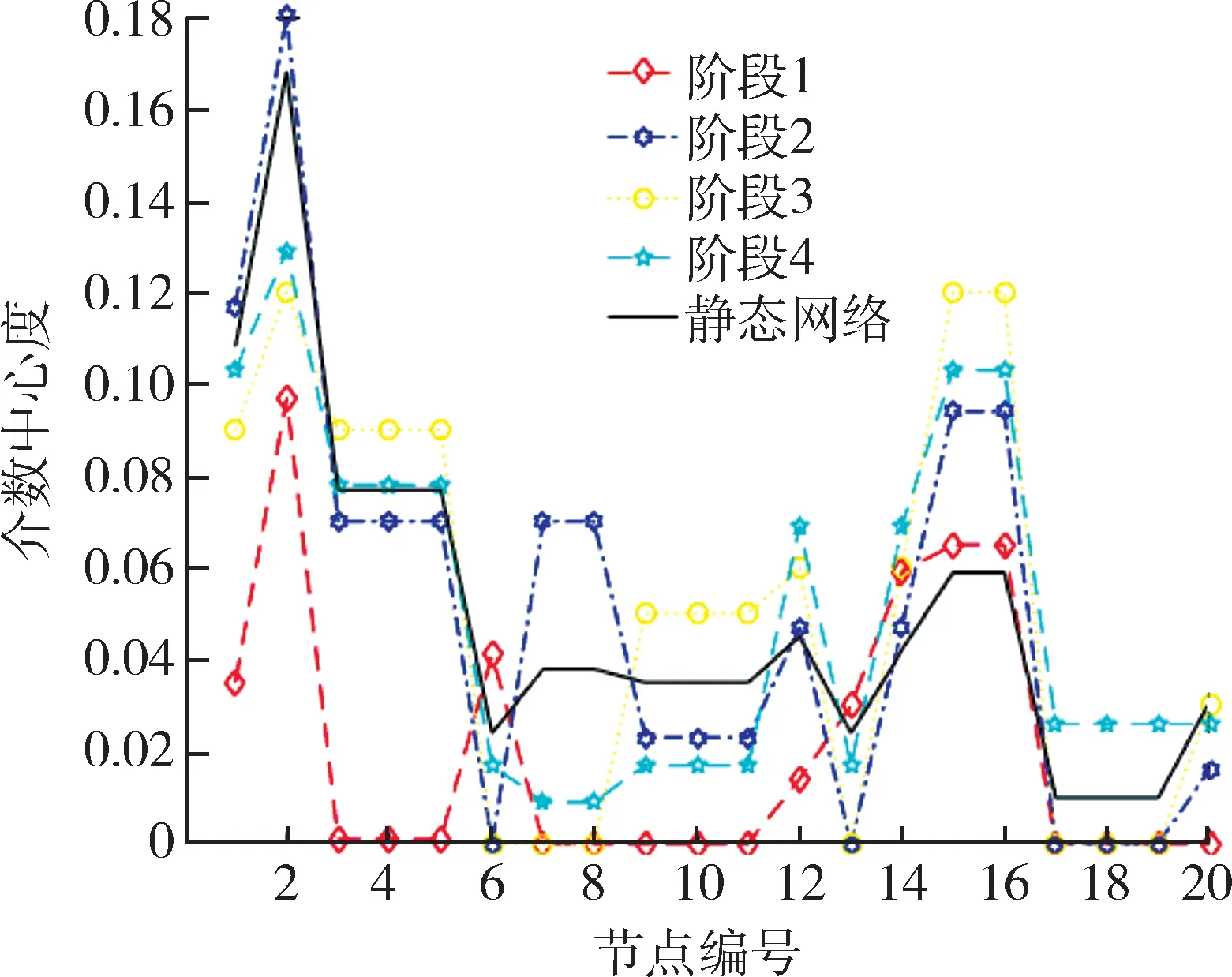
图6 各节点不同阶段介数中心度变化图Fig.6 illustration of variation of intermediate centrality of each node at different stages
反导作战阶段基本上是根据传感子网探测、跟踪、识别能力来划分的,预警卫星、远程预警雷达、精密跟踪雷达分别在不同阶段的介数中心度反映了作战阶段,与其在不同阶段发挥作用不同密切相关,尤其是在精密探测识别和火力打击阶段对态势信息共享和传输的需求量最高,这与实际作战情况基本上相符合。
5 结束语
本文从物理域、信息域和认知域三重空间的角度出发,结合反导作战体系运用流程,建立了反映作战体系现实复杂网络特性的反导作战体系运用流程超网模型,深入分析网络单元之间的静态交互机制和动态交互机制,为反导作战体系运用流程建模深入研究提供理论指导。但在建模中还未考虑外部攻击的风险,下一步在运用流程风险分析的基础上,运用优化理论将运用流程优化转化为最优路径选择问题。
猜你喜欢
计算机时代(2023年1期)2023-01-30 04:08:22
军民两用技术与产品(2021年10期)2021-03-16 06:05:26
小哥白尼(军事科学)(2020年3期)2020-07-27 01:55:22
小哥白尼(军事科学)(2020年4期)2020-07-25 01:25:22
小哥白尼(军事科学)(2020年5期)2020-05-22 06:23:28
中国外汇(2019年17期)2019-11-16 09:31:06
中国新通信(2019年21期)2019-03-30 04:01:30
小学科学(学生版)(2019年3期)2019-03-30 01:39:26
网络安全和信息化(2016年2期)2016-11-26 06:42:30
河南科技(2014年16期)2014-02-27 14:13:04