绕水翼空化流动多尺度数值研究1)
2022-07-10 13:13田北晨李林敏曹军伟
力学学报 2022年6期
田北晨 李林敏 陈 杰 黄 彪,3) 曹军伟
* (北京理工大学机械与车辆学院,北京 100081)
† (浙江理工大学浙江省流体传输技术研究重点实验室,杭州 310018)
** (嘉利特荏原泵业有限公司,浙江温州 325204)
引言
空化是水力机械中不可避免的一种水动力学现象,当流场内局部压力降低到一定程度时,会引起汽液相变[1]和空化核子生长[2],使得流场呈小尺度空泡生长溃灭行为和大尺度云空化或片空化脱落演变行为共存的多相多尺度状态,加剧了流动过程的时空复杂性.空泡脱落过程中空泡体积剧烈脉动导致的脉动压力以及微尺度空泡云团溃灭载荷等极易改变水力机械的性能、破坏过流部件表面和产生振动噪声[3-9].分析物体在空化过程中空泡形态非定常演化特征,对表征水力机械和水下航行体在复杂流动中的稳定性有着重要意义.
空化作为一种包含空化核子生长、汽泡的形成、发展和溃灭的强瞬态汽液两相流动现象,伴随着复杂的多相多尺度结构.随着实验技术的不断发展,研究者们发现水中分布着大量的由几微米至百微米量级的空化核子,Tsuru 等[10]利用高速摄像法观察到水中空化核子的尺度越小含量越多.Khoo等[11]利用空化磁化率仪监测到水中也存在0.5~5 μm尺度的微空泡,且空化核群遵守幂函数规律.流体中空化核子运动至低压区时会迅速生长为空化泡,随着空泡生长、靠近和融合,逐渐发展成可附着于固体表面的大尺度连续空穴.空化发展过程中伴随着大尺度空化团的断裂脱落现象,断裂脱落的空泡团往往呈现云雾状态,其微观结构充满大量尺寸不同的微小蒸汽泡,流场密度分布在介观尺度上是离散的[12].Kubota 等[13]利用激光多普勒技术,得到了空穴尾部脱落的空泡团是由许多微小球形蒸汽泡组成的大尺度漩涡.Kawanami 等[14]应用高速摄影技术研究了绕水翼空化的三维流动特性,发现回射流切断片空泡后形成的云雾空泡团以大量微小空泡群形式存在,随着其向下游发展,云雾泡团逐渐发展形成一种与U 型结构相似的宏观含能大尺度涡结构.Liu 等[15]采用激光全息成像方法,对云空泡涡结构细节进行了观测和测量,发现大尺度结构内部及周围存在大量的微小汽泡,汽泡尺度从几百米微米到几十微米不等,满足一定的幂函数分布规律.虽然研究者们针对空化问题基于高速摄像技术开展了大量的实验观测[16-17],然而局限于对图像进行处理与分析,尚不能对空化内部瞬态流场结构进行准确的定量分析,制约了对空化流场多尺度特征的认知.
数值计算方法一直是空化研究的主要手段之一.目前主要是采用欧拉法通过求解全流场的N-S方程对连续尺度空化进行模拟[18-19].然而,欧拉方法仅能得到宏观空泡形态和水动力学特性,忽略了汽泡尺度分布、相间滑移、汽泡和湍流的相互作用等重要因素.近年来,关于空化多尺度流动数值模拟方法逐渐成为空化流动数值研究中的热点和难点问题,连续相和离散相耦合求解的欧拉−拉格朗日方法[20-24]也逐渐应用到多相流动求解中.Tomar等[20]采用紧邻单元算法实现流体体积法(volume of fluid,VOF)和拉格朗日方法的转换,然而需要每个时间步搜索所有网格单元,计算量很大.基于离散奇异模型(discrete singularity model,DSM)和水平集方法的多尺度空化模型[21],相比网格单元的全局搜索,大大降低了计算资源消耗.研究者们将该模型应用于初生空化,漩涡流动中蒸汽核的生成,绕水翼片状云状空化转捩等流动中,显示良好的捕捉效果.Li 等[22]为解决VOF 方法不能识别亚网格尺度空化泡的问题,通过在准大涡方法求解连续相流场的基础上耦合离散气泡模型(discrete bubble model,DBM),研究了收缩扩张流道中的空化机制,分析了离散空泡的产生以及大尺度空泡从片状空化至云状空化的演变特征.在此基础上,Li 等[23]通过修正离散气泡模型,考虑了不同模型参数对多尺度空化计算结果的影响,研究了梢涡空化的多尺度时空演变特性.Ebrahim等[24]针对绕钝体多尺度空化问题建立的不可压缩欧拉−拉格朗日方法,能够准确获取钝体表面的初生空化、旋涡脱落及离散的云状空泡.在拉格朗日模型中引入新的子模型充分考虑了气泡的碰撞及破裂效应.在欧拉−拉格朗日过渡过程中,空腔的质量、动量和动能守恒.Wang 等[25]利用建立的VOFDBM 耦合空化模型对绕水翼空化流动进行模拟,发现湍流程度较高的空化流动对小尺度空泡运动及动力学行为具有重要影响,微尺度空泡的溃灭会加剧水翼表面的空蚀损伤.现阶段多尺度空化流动研究主要关注于空泡尺度的转化过程,而关于连续相流场对离散空泡的影响及空化发展过程中微尺度空泡的定量分析还有待加强.
综上,本文通过欧拉−拉格朗日方法对绕水翼空化流动展开研究,首先在欧拉体系下求解宏观尺度连续介质空化过程,在拉格朗日体系下模拟亚网格尺度微气泡与空化核的演化过程,同时建立了可解尺度宏观空泡与亚网格尺度微气泡相互作用与相互转化的算法.分析了多尺度空化流动演化过程、空泡在微观尺度与连续介质尺度之间的转化以及空化湍流流动对微尺度空泡时空分布特性的影响.
1 数值计算模型
1.1 连续相流场控制方程
本文首先基于欧拉法,采用大涡模拟(LES)方法对连续相流场进行模拟,其连续性方程和动量方程为

其中,Fs为连续尺度空泡表面张力[26],Sb为由离散空泡产生的源项.
通过求解连续相流场可获得每个求解单元中液相体积分数 αl及气相体积分数 αv,利用VOF 方法实现对连续介质尺度空泡界面的位置和方向进行捕捉
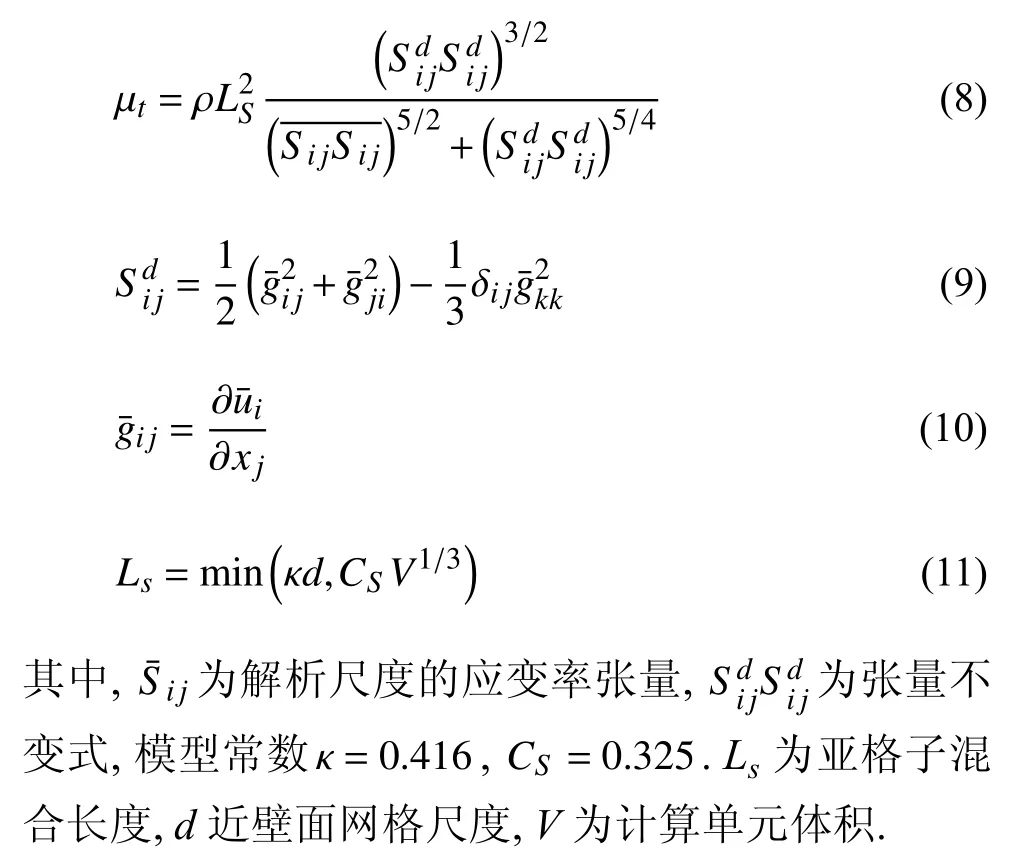
式中,µt为亚格子湍流黏度,采用WALE 模型[27]对其进行处理
1.2 空化模型
本文采用Schnerr-Sauer 空化模型计算绕水翼空化流动过程中相变引起的质量输运率
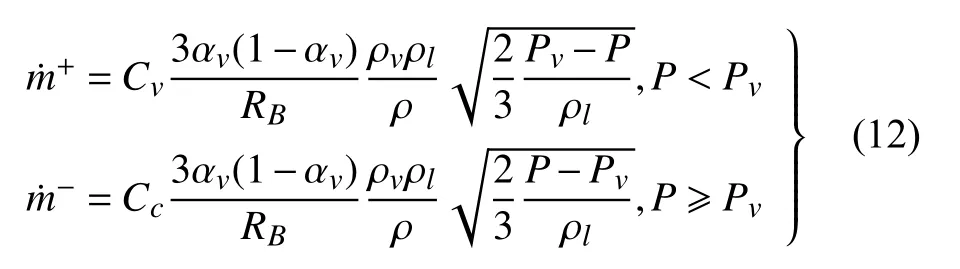
式中,Pv为饱和蒸汽压,P为当地压力,Cv和Cc为凝结和蒸发系数.RB为空泡半径,表示为
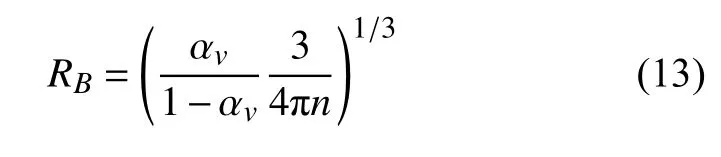
其中,空泡数密度n=1 × 1013.
1.3 离散空泡模型
绕水翼空化流动过程中,由于低压区空化核子的生长及大尺度空化空泡的断裂脱落,流场中分布着大量的介观尺度离散空泡[28].本文基于拉格朗日方法,求解游离于大尺度空腔之外的离散空泡.空泡运动方程及受力平衡方程为
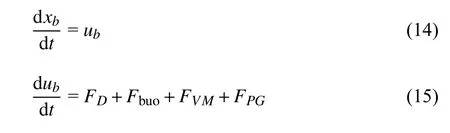
方程(15)右端项依次表示微尺度空泡在流场中所受阻力[29]、重力和浮力、附加质量力及压力梯度力[30,31],可分别具体表达为
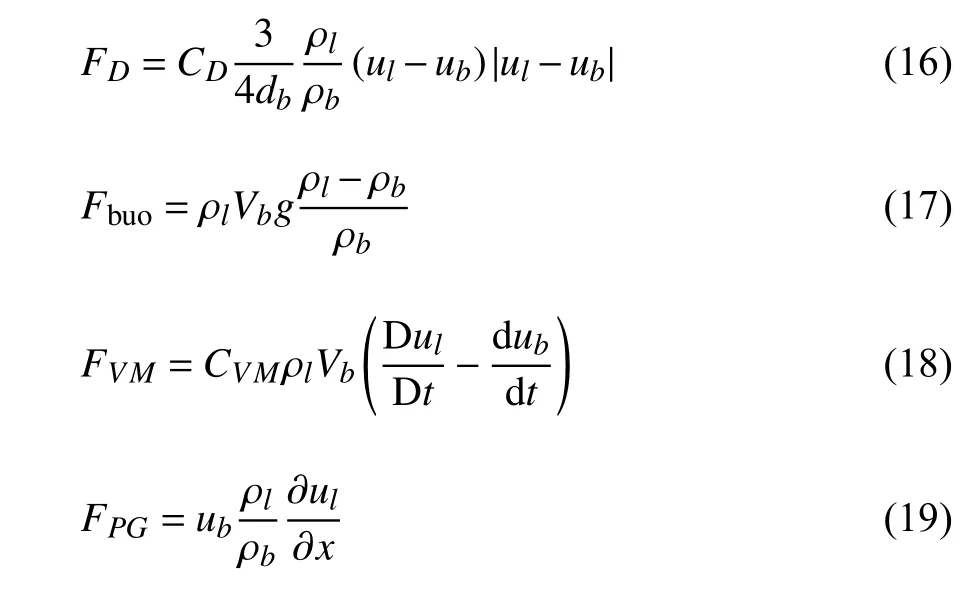
其中,采用球面阻力法[29]来确定阻力系数CD,虚拟质量力系数CVM取值为0.5,下表l及b分别表示空泡周围流场及空泡属性参数.
在获得连续相流场的基础上,通过求解简化的Rayleigh-Plesset 方程模拟微尺度气泡的生长和溃灭
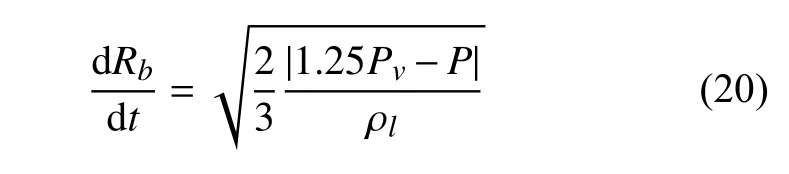
单位体积离散空泡数即初始空泡数密度设定为2 × 108,初始直径为2 × 10−6m[32].此外,由于空化流动中离散空泡小且运动速度较高,空泡接触时间和韦伯数大多小于临界值[33-36].因此,本文未考虑离散气泡的聚并和破碎.
1.4 欧拉−拉格朗日方法
图1 为求解器由拉格朗日方法向欧拉方法转换时动量及质量源项示意图.基于所采用的欧拉−拉格朗日方法,在计算离散空泡轨迹的同时,求解离散空泡沿轨迹的动量及质量变化,随即作为连续相控制方程(2) 中的源项Sb考虑离散相对连续相流场的影响.
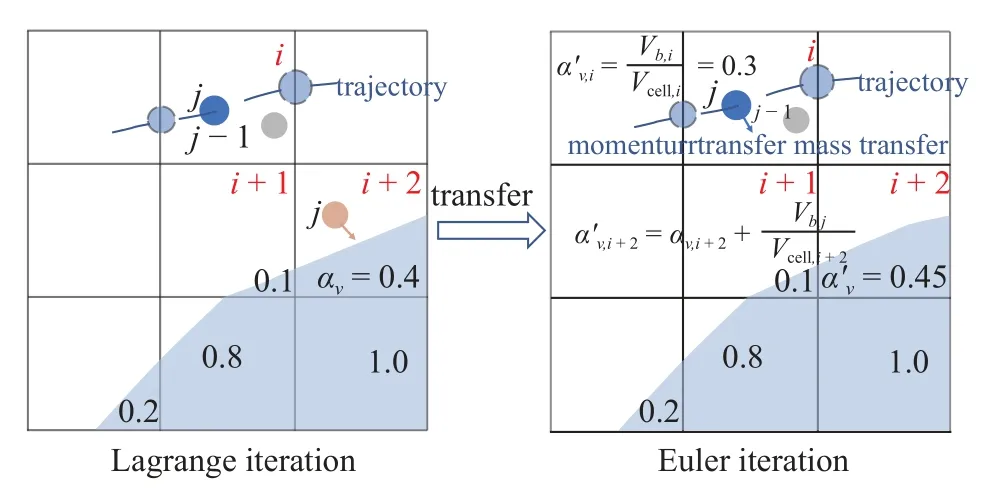
图1 欧拉−拉格朗日转换过程动量源项耦合示意图Fig.1 Schematic of the process of the momentum source term coupling during Euler−Lagrange transforms
欧拉−拉格朗日方法计算过程中,单位计算单元的动量源项为

其中,i表示流场求解单元序号,j表示求解单元内离散空泡序号.通过单位求解单元内空泡所受力均值,表征离散空泡对连续场欧拉动量方程的影响.
此外,在离散相到连续相的转化过程,移除大于网格体积的离散空泡.为保证系统质量守恒,在连续性控制方程(3)中添加由于离散空泡变化产生的质量源项[37]

其中,Sbv为离散空泡质量源项,且只在离散泡移除的时间步内在其所在的单元中添加一次,表示为

1.5 欧拉−拉格朗日双向耦合求解过程
本文采用欧拉−拉格朗日耦合求解算法,对绕水翼多尺度空化流动过程进行计算,图2 所示为欧拉−拉格朗日双向耦合计算流程图.在每一时间步求解过程中:

图2 欧拉−拉格朗日模型计算流程图Fig.2 Flow diagram of Euler−Lagrange model
(1)计算连续相流场
首先依次求解欧拉连续性方程、动量方程及空化质量输运方程,基于SIMPLEC 算法进行压力−速度耦合求解,获得速度场及压力场信息.流场内与大尺度空穴不连续且气相体积分数小于0.6[38,39]的计算单元内的小尺度蒸汽空穴,用随机填充的等体积离散空泡群代替,转换为拉格朗日法对其进行求解.
(2)引入离散相
为提高计算效率,每进行10 次连续相迭代后,对拉格朗日气泡进行一次迭代求解.首次进行离散相求解时,在压力低于形核压力的区域随机填充微尺度空泡(单位体积离散空泡初始空泡数密度2 ×108,初始直径为2 × 10−6m).
(3)求解离散空泡
根据已经获得的微尺度空泡周围的连续流场信息,依次计算空泡运动方程、动力方程及简化R-P方程,求解微尺度气泡的运动、生长和溃灭.当单个求解单元内的离散空泡体积大于当地网格体积时,将其转化为VOF 方法求解的空化泡,同时去除该离散空泡.
(4)基于离散空泡计算结果修正欧拉控制方程,重新计算连续相流场
将计算得到离散空泡中的动量交换项作为源项,修正连续相流场控制方程.此外,对离散空泡进行一次迭代计算后,由于离散空泡的运动和生长,会引起当地求解网格单元内气相体积分数发生变化.因此,在计算过程中的每个时刻均求解离散空泡所占体积分数,并考虑这部分体积变化来修正空泡体积分数,从而获得不同尺度空泡含量的总体分布.
(5)判断连续相及离散相是否收敛
完成离散相迭代后,判断连续相及离散相计算结果是否达到收敛精度要求,如未达到收敛标准,重复以上步骤,直至连续相及离散相均达到收敛精度要求后,进入下一时间步求解.
1.6 计算域设置及网格划分
图3 所示为计算域及边界条件设置,数值计算采用三维NACA66 水翼模型,水翼弦长c=100 mm,计算域尺寸为6c× 0.3c× 3c,水翼前缘距计算域入口2.5c、距计算域上表面1.5c.计算域左表面设置为速度入口,右表面设置为压力出口,上、下表面设置为固壁面,前、后表面设置为对称面.数值计算域和边界条件与实验保持一致,水翼攻角α0=8º,入口来流速度U∞=10 m/s,Re=1 × 106,出口压力根据空化数确定,空化数σ=1.5,流体介质为常温水密度ρl=998 kg/m3,动力黏度ν=1 μPa·s,常温下饱和蒸气压设置为pv=3169 Pa.采用全结构化网格对流体域进行网格划分,对水翼的前缘、尾缘以及尾流区进行加密处理.通过三种不同精度网格对比,进行网格无惯性验证.在进行网格划分时,3 套网格沿展向分布数量分别为35,70 及100,其余方向网格分布相同,如图4 所示.如表1 所示,对应网格数量分别为235 万、470 万及670 万.为了保证近水翼壁面湍流边界层计算精度,要求垂直于水翼表面方向网格无量纲精度y+=yuτ/ν<1,y为水翼表面第一层网格的厚度,uτ为壁面摩擦速度,沿水翼弦长及展向方向网格无量纲精度分别为x+≈ 100 及z+≈ 30[40].

图3 计算域及边界条件设置Fig.3 Computational domain and boundary conditions
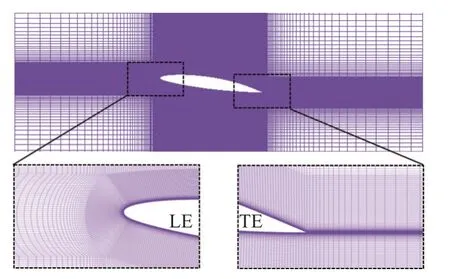
图4 计算域网格划分Fig.4 Computational domain mesh
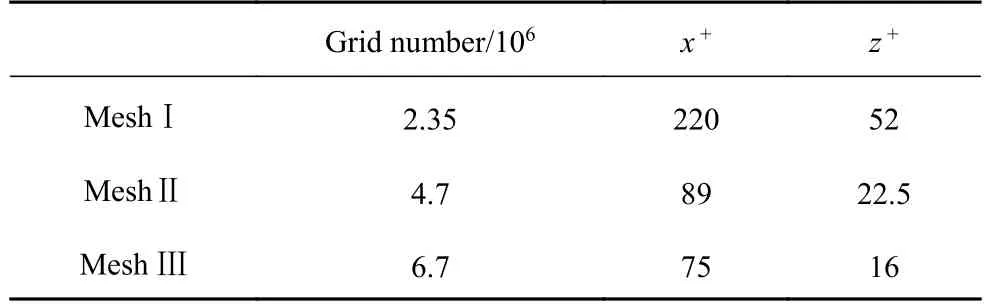
表1 网格数、x+ 及 z + 值Table 1 Number of grids,x+ and z + values
图5 为三种不同网格在相同计算时刻(t=0.2 s)水翼吸力面y+分布云图.如图5(a)所示,网格数较少时,水翼吸力面大部分区域y+>1,不满足LES 方法要求,第二及第三套网格水翼吸力面大部分区域y+<1.同时由表1 可知,第二及第三套网格的x+及z+值均能满足网格精度要求.为了提高计算效率,本文选取第二套网格对绕水翼空化多尺度效应进行计算研究.
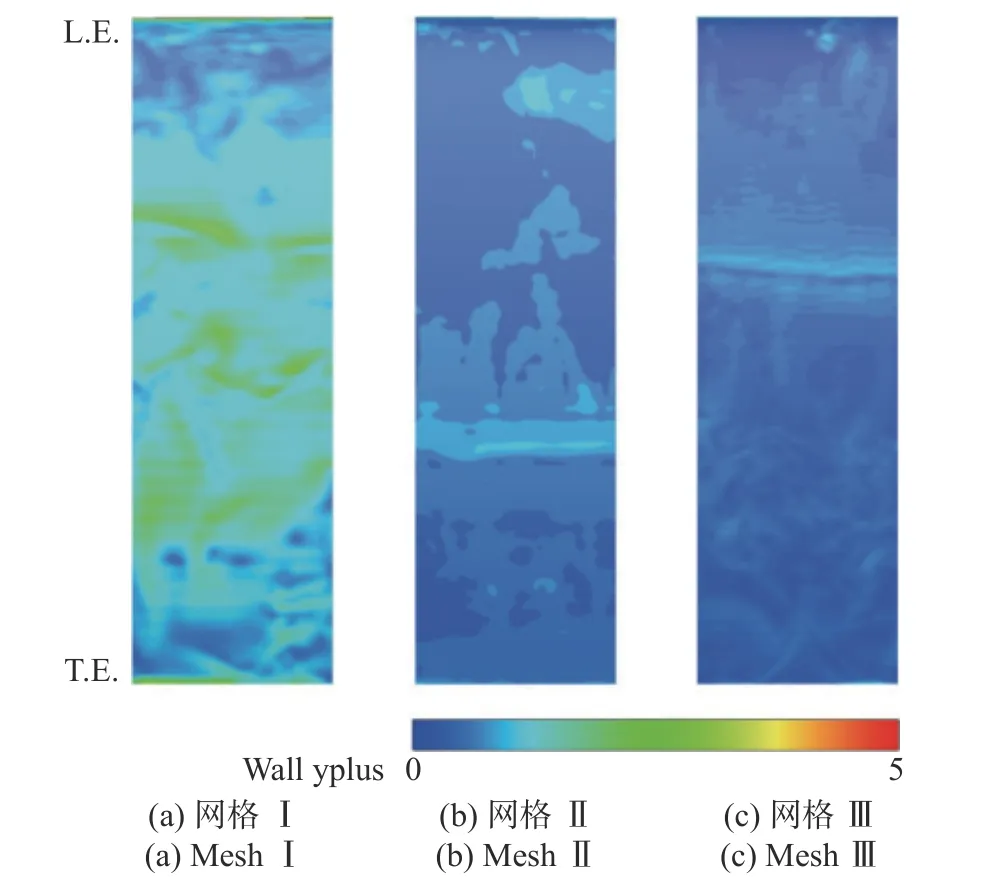
图5 相同计算时刻水翼吸力面y+ 分布Fig.5 The y+ value distributions on the suction side of hydrofoil at the same calculation time
2 结果与讨论
2.1 多尺度空泡时空演化及模型验证
绕水翼云状空化流动一般可分为附着型空穴生长、回射流发展及云状空穴脱落三个典型阶段,图6 给出了绕NACA66 水翼云状空化数值及实验对比结果,t1至t2时刻,空化处于附着型空穴生长阶段,片状空穴逐渐生长至水翼中部,云状脱落空穴沿主流向下游运动、溃灭,在附着型空穴尾缘及云状脱落空穴周围存在微尺度离散空泡.t3至t4时刻,空化处于回射流发展阶段,在附着型空穴内外逆压梯度作用下,回射流沿水翼吸力面向空泡前缘推进,大尺度片状空穴长度进一步增长,在回射流影响区域,片状空穴界面处离散空泡数量及空泡尺度明显增加.t5至t6时刻,空化处于云状空穴脱落阶段,在回射流作用下,片状空穴完全脱离水翼吸力面后,逐渐汇聚为较大尺度的云状空穴,同时水翼前缘再次出现片状空穴,此阶段离散空泡主要集中于云状空穴区域.同时,图7 给出了在空化发展过程中典型的空泡欧拉−拉格朗日尺度转化过程,t=0.28Tref~0.31Tref阶段,云状空穴运动至水翼尾缘,发生破裂、溃灭并离散为大量微尺度拉格朗日空泡,如图7(a) 所示;t=0.32Tref~0.376Tref阶段,当湍流流场局部压力降低时,微尺度空泡迅速生长、融合为大尺度U 型空穴,如图7(b)所示.通过与实验结果对比可知,在整个云状空化发展周期内,建立的欧拉−拉格朗日耦合方法不仅能够表征大尺度连续空穴的生长过程,而且能较为准确捕捉到流场中存在的离散空泡及空泡尺度转换过程.
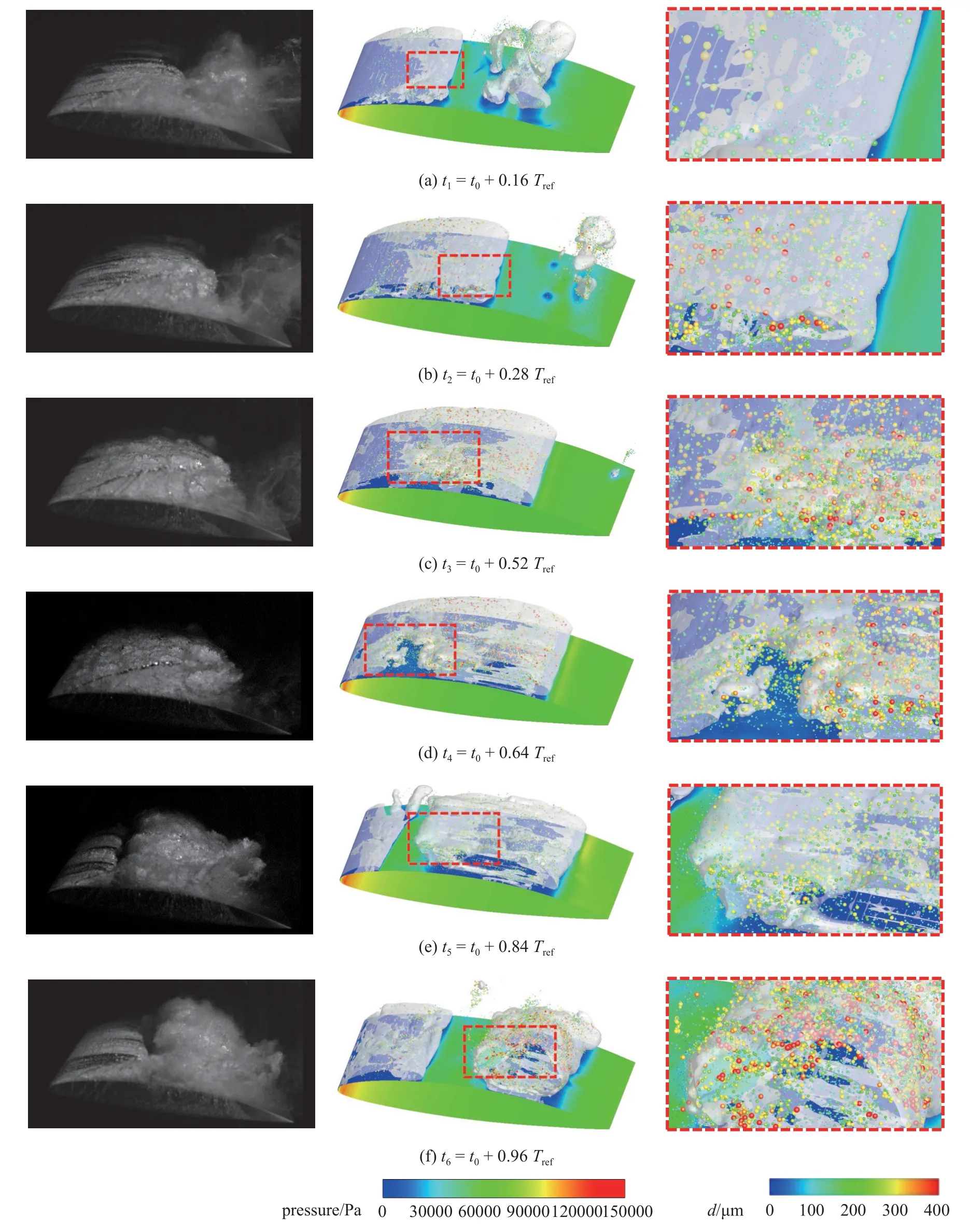
图6 典型周期绕水翼多尺度空泡时空演化(气相体积分数αv=0.1)Fig.6 Spatial-temporal evolution of multiscale cavitation around hydrofoil on typical period (αv=0.1)
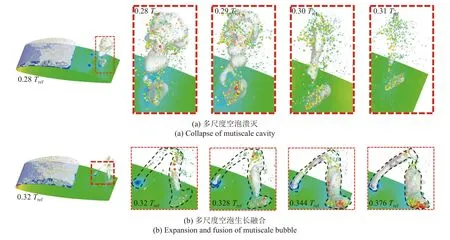
图7 空泡欧拉−拉格朗日多尺度转化及演变过程Fig.7 The process of transition and evolution between Euler−Lagrangian frame of bubble
图8 给出了绕水翼空化流动过程中水翼升力系数及振动位移频谱对比,通过数值计算获取的水翼升力系数主频为44.98 Hz,实验获取的同等工况下水翼振动主频为44.86 Hz.由于在进行数值计算时未考虑水翼与固壁面之间的1 mm 间隙及水翼与固壁面粗糙度,因此,空泡形态的实验与数值结果存在差异.而绕水翼空化流动升力系数及振动位移频率误差仅为2.67‰,在一定程度上验证了建立的数值模拟方法的准确性.
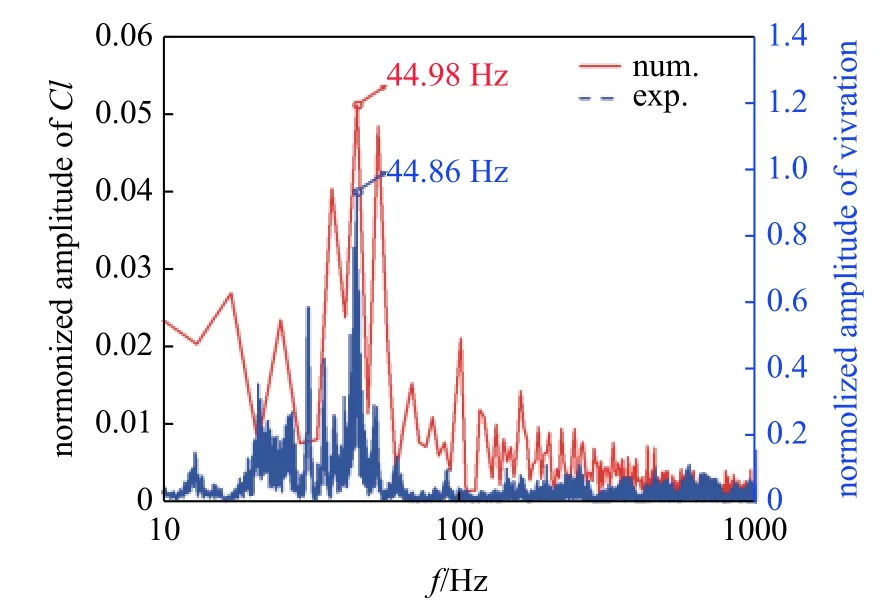
图8 水翼升力系数及振动位移频谱对比Fig.8 Comparison of lift coefficient and vibration displacement spectrum of hydrofoil
2.2 微尺度空泡群瞬态特性
图9 所示为微尺度空泡数量随时间变化曲线,结合图6 可知,0~0.32Tref时刻,空化流动处于附着型空穴生长阶段,绕水翼空化流动主要以附着型空穴生长为主,伴随着云状空穴运动、溃灭,随着附着型空穴逐渐生长,片状空穴尾缘处离散空泡数量增多,空化区微尺度空泡数量先减少后增加,但此阶段空泡数量整体波动不大;0.32Tref~0.68Tref时刻,绕水翼空化流动处于回射流发展阶段,在逆压梯度作用下,回射流沿吸力面逐渐向水翼前缘推进,回射流扰动区域片状空穴界面发生破裂,离散空泡数量逐渐增加;0.68Tref~Tref时刻,空化流动处于云状空穴脱落阶段,其中0.68Tref~0.8Tref时刻大尺度片状空泡逐渐汇聚为云团状,部分离散空泡融合为连续尺度空穴,微尺度空泡数量逐渐减少,0.8Tref~Tref时刻,随着云状空穴向水翼尾缘高压区运动,大尺度空穴溃灭产生大量离散空泡,微尺度空泡数量迅速增加.绕水翼空化流动属于强瞬态湍流流动,流域内频繁的进行着欧拉−拉格朗日空泡尺度转换,因此在一个云状空化周期内,微尺度离散空泡数量既随着空化发展阶段呈规律性变化,又具有较强的波动性.

图9 单周期内空泡数变化曲线Fig.9 Variation of the number of bubbles in one cycle
图10 所示为各空化发展典型时刻,计算域内微尺度空泡数随泡径分布图,在整个空化发展周期内,流域内离散空泡具有相似的伽马分布规律.随着微尺度空泡直径增大,流场中空泡数量先增大后减小,离散空泡集中分布在直径0~200 μm 尺度范围内.

图10 微尺度空泡数密度谱Fig.10 Microscale cavitation number density spectrum
离散空泡伽马分布特征函数为
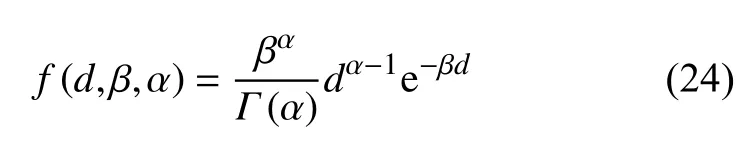
其中,d为微尺度空泡直径,β为逆尺度参数,α为形状参数.
由微尺度空泡概率密度函数可知,在绕水翼云状空化流动过程中,空化区域离散空泡期望直径为

同时,在空化流场内微尺度空泡群索特平均直径(Sauter mean diameter)定义为

图11 给出了绕水翼空化流动过程中离散空泡索特直径及期望直径随时间变化曲线,微尺度空泡群平均直径及分布期望直径具有相似的变化规律.在附着型空穴生长阶段及回射流推进阶段,离散空泡索特平均直径及期望直径逐渐增加;在云状空穴脱落阶段,t5=t0+0.84Tref时刻之前,大尺度片状空穴逐渐汇聚为云团状,离散空泡索特平均直径及泡群分布期望直径均有所减小,t5=t0+0.84Tref时刻后,随着云状空穴向高压区运动,连续尺度空穴迅速溃灭、离散为大量微尺度空泡,离散空泡索特尔平均直径及泡群分布期望直径增大.
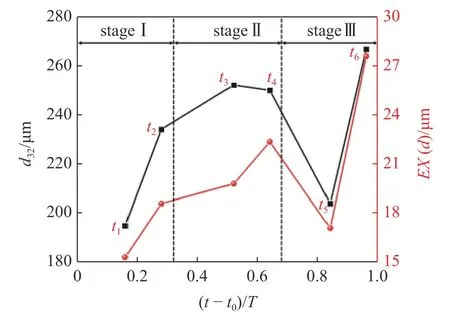
图11 离散空泡群索特直径及微尺度空泡期望直径随时间变化曲线Fig.11 Sauter diameter of discrete cavitation group and expected diameter of microscale bubble verse time
2.3 微尺度空泡群空间分布特性及湍流的影响
图12、图13 及图14 为空化流动各阶段微尺度空泡数密度云图,表征了沿水翼弦长方向不同尺度空泡数密度,其中黑色虚线为0.018 概率密度等值线,红色虚线为0.009 概率密度等值线.图15、图16 及图17 分别为水翼中截面对应空化阶段连续相湍流流场压力云图、气相分布云图、涡量云图及湍流脉动强度云图,其中白色实线为中截面上αv=0.1 的大尺度空穴轮廓.
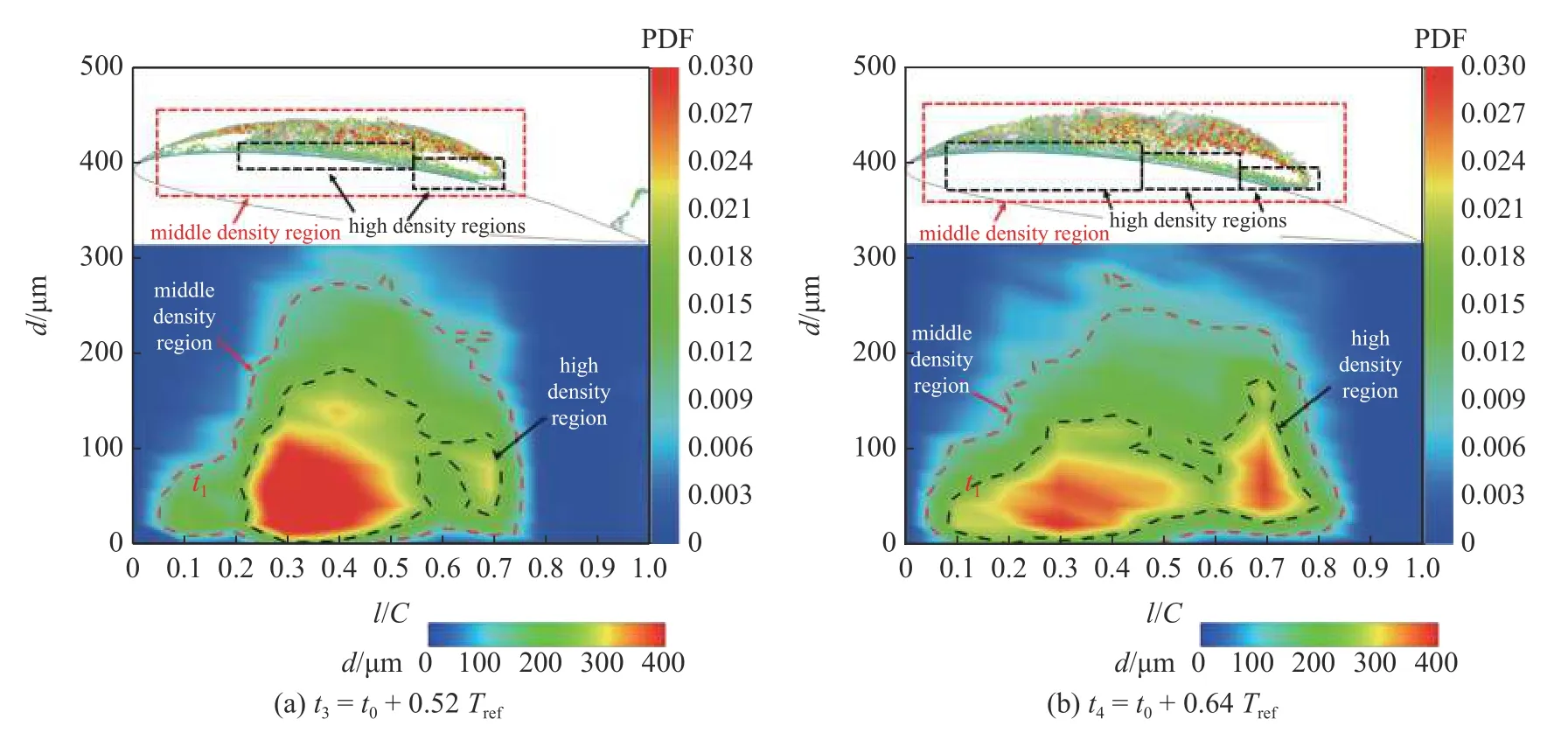
图13 回射流发展阶段不同尺度离散空泡数概率密度分布云图Fig.13 The probability density of discrete cavitation numbers at different scales during the stage of the development of re-entrant jet

图14 云状空化脱落阶段不同尺度离散空泡数概率密度沿水翼分布云图Fig.14 The probability density of discrete cavitation numbers at different scales during the stage of the cloud sheds
图12 给出了附着型空穴生长阶段微尺度空泡数密度云图,流域内离散空泡主要分布在水翼中部的附着型空穴尾缘水气界面处及水翼尾部的云状空穴区域,其中直径较大的离散空泡主要分布在附着型空穴上表面及云状空穴周围.t1=t0+0.16Tref时刻,附着型空穴尾缘区域离散空泡主要集中在0~120 μm 范围,而云状空穴区域空泡尺度范围为0~250 μm,如图12(a)所示.随着附着型空穴生长及云状空穴溃灭,t2=t0+0.28Tref时刻,附着型空穴区域离散空泡沿弦长方向分布范围及空泡尺度范围增大,云状空穴区域离散空泡沿弦长方向分布范围及空泡尺度范围减小,如图12(b)所示.

图12 附着型空泡生长阶段不同尺度离散空泡数概率密度分布云图Fig.12 The probability density of discrete cavitation numbers at different scales during the stage of the growth of attached cavity
离散空泡分布特性受湍流流场影响较大,如图15 所示,离散空泡主要存在于附着型片状空穴边界附近及云状空穴周围的低压区,这是由于在片状空穴尾缘及云状空穴区域存在的旋涡结构,引起了大尺度空穴界面处及云状空穴区域的高涡量及强湍流脉动,湍流动能耗散效应显著,促进了空泡水气界面破裂,产生离散空泡[41,42].
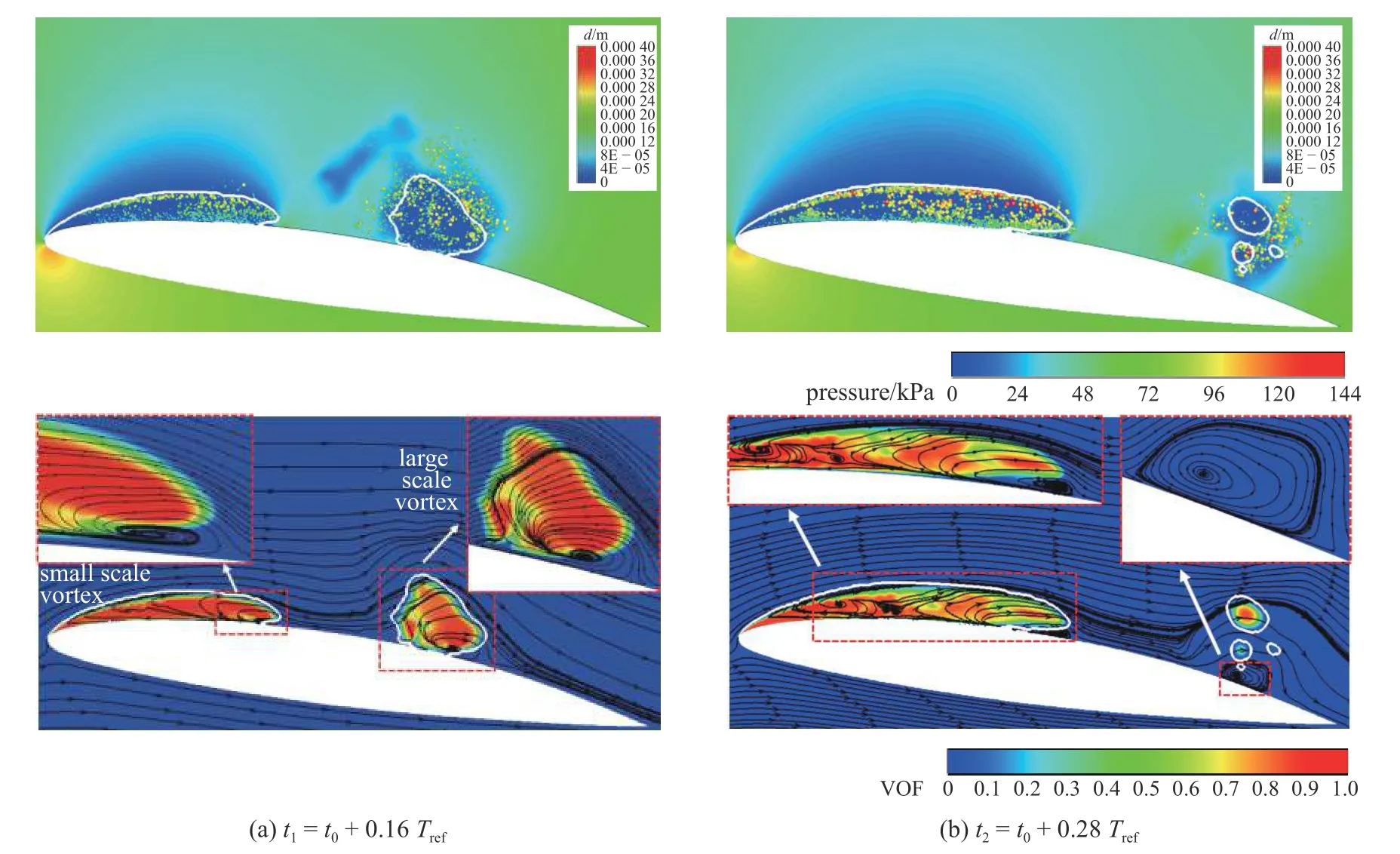
图15 附着型空泡生长阶段湍流流场特性Fig.15 Characteristics of turbulent flow field during the stage of the growth of attached cavity
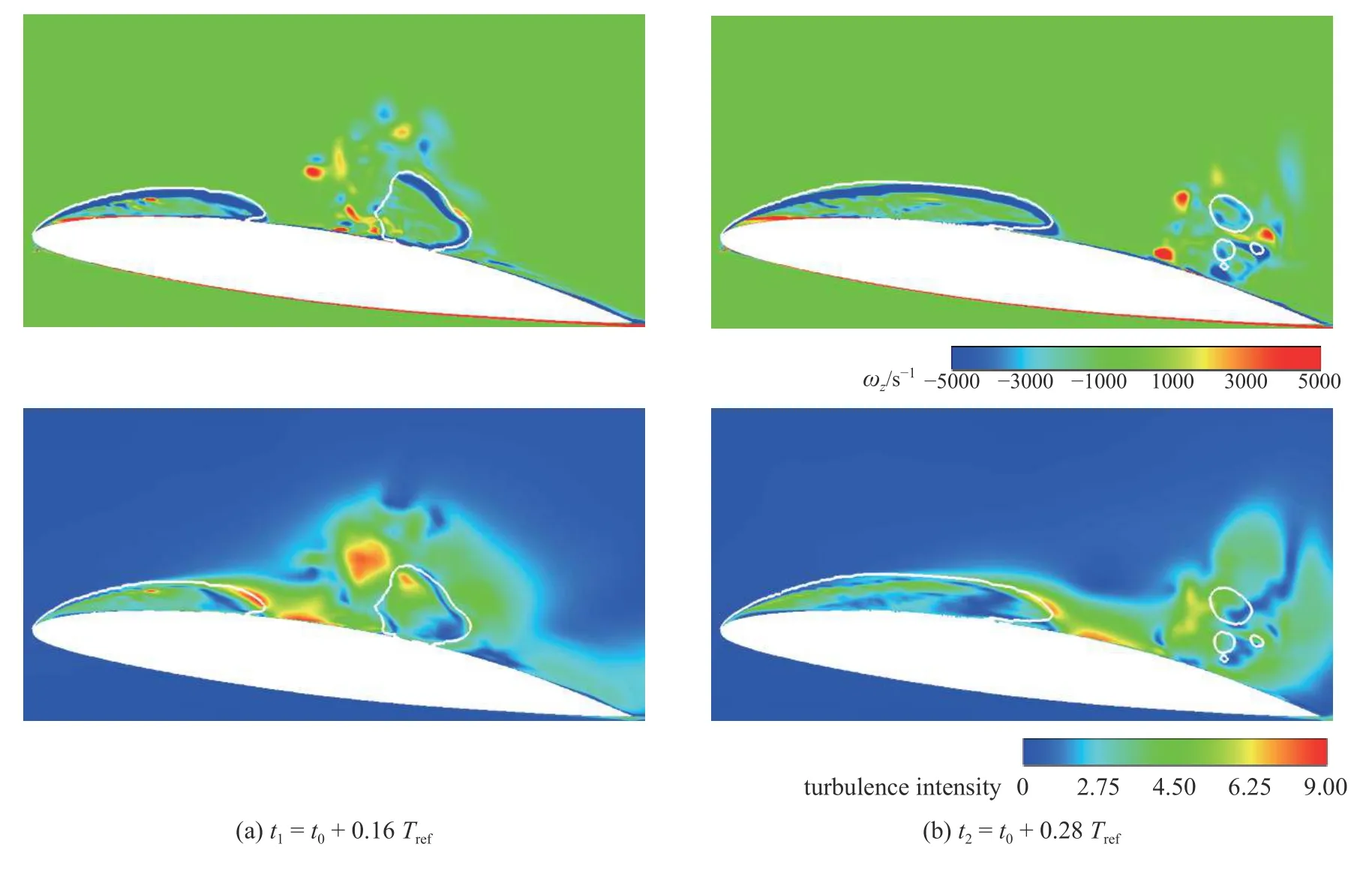
图15 附着型空泡生长阶段湍流流场特性(续)Fig.15 Characteristics of turbulent flow field during the stage of the growth of attached cavity (continued)
图13 所示为回射流发展阶段微尺度空泡数密度云图,离散空泡分布高概率密度区主要分布于水翼中部回射流发展区域,空穴与水翼吸力面之间空泡概率密度较高,微尺度空泡尺度范围约为0~260 μm,直径较大的离散空泡主要存在于片状空穴上表面.
由图16(a)可知,t3=t0+0.52Tref时刻,回射流沿水翼吸力面发展至x=0.2c处,片状空穴受回射流影响区域存在大尺度旋涡结构,空穴界面处涡量较大,空穴内部湍流脉动程度较强,空穴中后部低压区分布有大量微尺度空泡.t4=t0+0.64Tref时刻,回射流沿水翼吸力面发展至x=0.05c位置,受回射流影响大尺度片状空穴断裂,空穴内部存在复杂的旋涡结构,强涡量及强湍流脉动区分布区域增大,进一步促进了空穴破裂产生微尺度空泡,如图16(a)所示.

图16 云状空化脱落阶段不同尺度离散空泡数概率密度沿水翼分布云图Fig.16 The probability density of discrete cavitation numbers at different scales during the stage of the cloud sheds
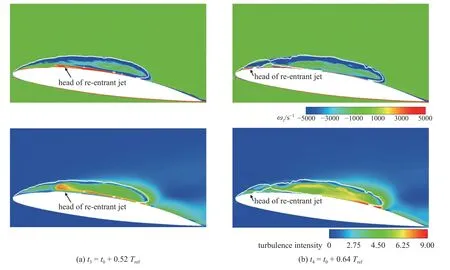
图16 云状空化脱落阶段不同尺度离散空泡数概率密度沿水翼分布云图(续)Fig.16 The probability density of discrete cavitation numbers at different scales during the stage of the cloud sheds (continued)
图14 所示为云状空穴脱落阶段微尺度空泡数密度云图.如图14(a)所示,t5=t0+0.84Tref时刻,片状空泡逐渐远离水翼上表面,水翼前缘再次出现片状空泡,离散空泡主要分布于脱落空穴区域,片状空穴与水翼吸力面之间空泡概率密度较高,空泡尺度主要集中于0~100 μm 范围,空穴上表面及空穴尾缘空泡分布概率密度较低,空泡尺度分布约为0~200 μm.t6=t0+0.96Tref时刻,脱落空泡汇聚为云团状,附着型空穴尾缘区域离散空泡主要集中在0~110 μm 范围;云状空穴区域空泡分布范围较广、概率密度较高,空泡尺度范围约为0~300 μm,如图14(b)所示.
如图17 所示,在脱落空穴逐渐汇聚为云团状并向下游运动过程中,大尺度空穴区域始终存在着较大尺度的旋涡结构,致使云状空穴区域存在较强的涡量场及湍流脉动,促进了空化云团破裂离散为大量微尺度空泡,同时在大尺度涡旋的影响下,离散空泡分布区域逐渐集中在连续尺度空穴水气界面附近低压区.
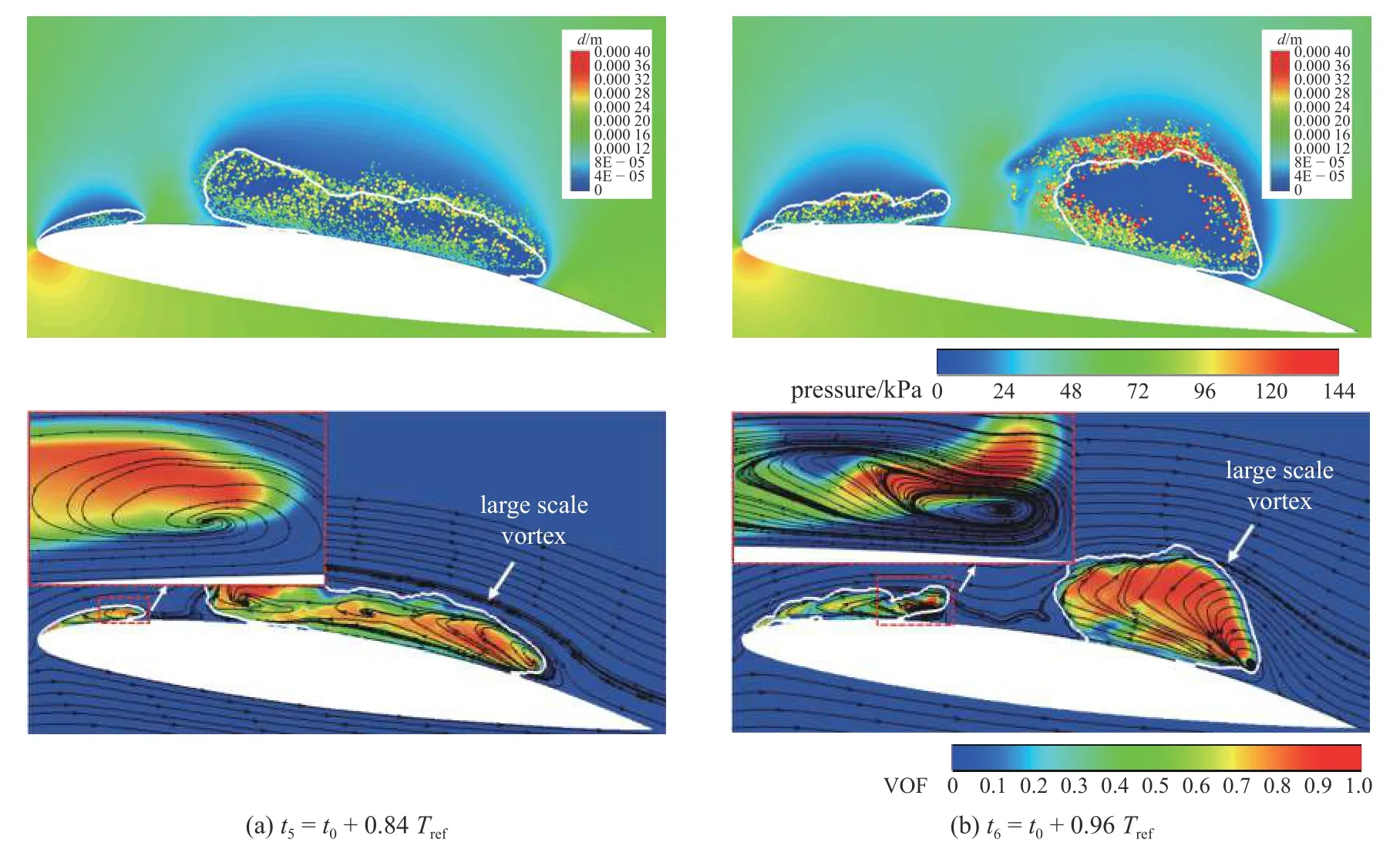
图17 云状空化脱落阶段湍流流场特性Fig.17 Characteristics of turbulent flow field during the stage of the cloud sheds

图17 云状空化脱落阶段湍流流场特性(续)Fig.17 Characteristics of turbulent flow field during the stage of the cloud sheds (continued)
3 结论
本文通过欧拉−拉格朗日双向耦合算法研究了绕水翼云状空化过程,获得了流场多尺度空泡演变特性及离散空泡在一个云状空化周期内的时空分布特征,分析了湍流流场结构对多尺度空泡演变规律的影响,主要得出以下结论.
(1)欧拉−拉格朗日模型准确预测了绕水翼云空化湍流流动的多尺度特征,包括欧拉体系下的片状空泡生长、回射流发展及云空泡脱落与拉格朗日体系下离散空泡的运动、生长溃灭以及微尺度空泡在欧拉和拉格朗日体系间的过渡.
(2)绕水翼云空化流动过程,微尺度离散空泡直径的概率密度谱符合伽马分布规律.在一个空化周期内,微尺度空泡数量在附着型空泡生长阶段波动较小,在回射流推进时离散空泡迅速增多,在云状空穴脱落阶段空泡数量先减少后增多.
(3)宏观非定常流场特征对拉格朗日离散空泡有显著影响,微尺度空泡主要集中分布在强湍流强度脉动区及旋涡区域.附着型空穴尾缘与云状空化区域存在的旋涡结构,增强了流场湍动强度,促进了空化两相界面破碎,产生离散空泡.同时回射流也会增强水气界面剪切效应,引起空泡波动产生大量微尺度空泡.
猜你喜欢
力学学报(2022年9期)2022-10-05
力学学报(2022年5期)2022-06-16
水下无人系统学报(2022年2期)2022-05-12
车用发动机(2021年5期)2021-10-31
弹道学报(2021年3期)2021-10-08
宇航总体技术(2021年3期)2021-06-11
科学导报·学术(2020年70期)2020-06-21
杂文选刊(2019年12期)2019-12-06
意林·少年版(2018年22期)2018-12-05
新青年(2018年8期)2018-08-18