混合交通流交叉口共享空间交互行为建模及仿真
2022-06-30 09:19:08李逸昕倪颖孙剑
交通运输系统工程与信息 2022年3期
李逸昕,倪颖,孙剑
(同济大学,道路与交通工程教育部重点实验室,上海 201804)
0 引言
近年来,由于在保证测试安全性和降低测试成本方面具有优势,虚拟测试逐渐成为智能汽车安全性测试的核心手段[1]。虚拟测试工具主要由车辆仿真、通信仿真、交通仿真以及驾驶人仿真等部分构成。然而,现有虚拟测试仿真工具往往更加侧重车辆动力学仿真和车辆通信建模,其背景交通流仅基于预设的交通个体运行轨迹产生,交通流运行状态理想,交互规则简单,优先权明确,无法生成及模拟能够与测试主车产生交互的背景交通流环境,导致虚拟测试的效果往往并不能满足智能汽车对于虚拟测试环境真实性的需求[2]。而微观交通流仿真技术通过解析不同性质交通流的运行机理和交互机制,在真实模拟交通个体微观行为的同时,还可以控制背景车流的流量、行为及构成等因素来复现交互场景,以提高智能车虚拟测试的可靠性[3]。因此,通过微观交通流仿真技术,为现有虚拟测试工具注入真实可靠的背景交通流仿真环境,提高虚拟测试结果的可信度,成为虚拟测试水平和效果不断进步和提升的必经之路[2]。混合交通流交叉口共享空间是城市交通网络中最常见的场景之一,也是制约智能汽车规划决策算法逻辑迭代的可靠性和安全性的关键瓶颈场景之一。在交叉口共享空间中,往往存在多种类型的交通流混合行驶,交通个体异质化构成,运动轨迹非结构化,运动自由度非常高[4]。由于不同流向和类别的交通个体之间频繁交互,交通流持续地相互干扰,交通个体间冲突交互明显,严重影响着交通运行的整体效率和安全,也威胁着智能汽车在混杂交通环境下实现安全自主驾驶的前景。因此,亟需为智能汽车虚拟测试工具建立和注入一种能够准确描述交叉口共享空间中异质交通个体的运动和交互特征的微观交通仿真模型。这对于满足智能汽车虚拟测试的真实性需求,提高虚拟测试的可信度及测试效率等方面均具有重要意义。
目前,已有较多交叉口共享空间中混合交通流交互建模的研究。其中,基于车道的模型(Lanebased Model)和元胞自动机模型(Cellular Automata,CA)是两类最常见的建模方法。基于车道的模型通过引入虚拟车道的概念,控制交通个体始终在以车道→路段→路径(Link-connectorpath)结构为基础的路网中运动,交互则被横、纵向解耦合为跟驰行为和间隙接受行为[5-6]。CA 模型从时间和空间上将交通个体的运动离散化在大小固定的网格中,通过赋予一系列的决策演化规则模拟交通个体的交互[7]。例如,JELENA等[8]设计了一系列元胞组件构建道路网络基础设施,实现对交叉口共享空间混合交通流交互的模拟;LI等[5]通过为机动车和非机动车设置不同的元胞占用规则,模拟异质交通个体间的交互等。总之,上述模型会为不同类型交通参与者分别配置相对独立的运行空间,冲突点的位置事先预定和不可改变,交互因而往往被看作是基于事先设定的优先规则所实现的一对一有序固定交互[6]。
然而,虚拟测试往往要求背景交通流能够模拟现实中交通个体横、纵向耦合的二维运动,并真实反映交通个体在交互行为产生时的感知、决策等关键过程,以此帮助智能汽车在训练中逐步实现对交通个体间交互行为的准确解析和精确预测。但现有模型和做法在本质上均大大简化了交叉口共享空间中异质交通个体间交互过程的复杂性,交互往往更加关注纵向上交通个体间的相互作用,横、纵向耦合的实际运动和交互特征被忽略[9-10];同时,事先预设固定的冲突交互位置以及“一对一”的决策机制,更导致现有模型无法在二维平面上刻画交通个体之间的冲突及其冲突位置的复杂动态性特征,使得现有模型无法真实复现交通个体交互不断变化的过程,因此,不具备为智能汽车虚拟测试提供接近现实的复杂交互场景的能力。
鉴于此,本文针对混合交通流交叉口共享空间内交通个体的交互行为建模,满足智能汽车虚拟测试对于真实背景交通流模拟的需求。首先,提出了一种混合交通流共享空间交互模型,模拟机动车、非机动车及行人之间的冲突和交互,模型包含“感知-决策-执行”这3 层通用建模框架,精细化描述异质交通个体从感知、决策直至执行的交互全过程,并体现冲突交互的动态性特征;其次,基于虚拟测试Opendrive高精度路网[11]搭建了一套向虚拟测试工具注入背景交通流的仿真测试平台,并将所构建的交互模型加载至虚拟测试环境进行测试。模拟结果表明,模型具备在Opendrive 测试路网中复现真实交互行为的能力。同时,该测试平台能够有效地将仿真背景交通流加载至虚拟测试环境中。本文的结论能够为如何通过交通仿真技术提高智能汽车虚拟测试背景交通流的真实性提供一定的借鉴价值。
1 交互模型基本框架
基于认知科学中对人类行为过程的定义[12],本文提出的交互模型被设计为“感知-决策-执行”的3 层认知过程框架模型,实现对交叉口共享空间中混合交通流异质交通个体完整交互过程的模拟。框架模型的整体逻辑如图1所示。
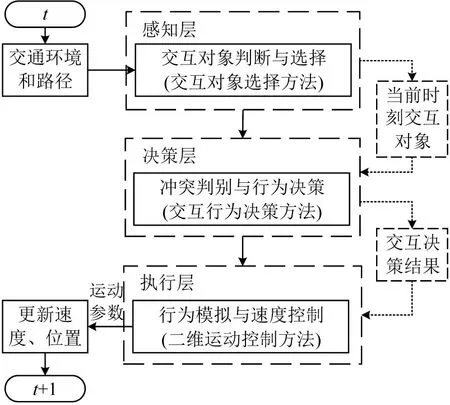
图1 模型框架Fig.1 Model framework
本文的目标是模拟混合交通流中异质交通个体之间的冲突交互。因此,所提出的通用框架应当具备在体现交通参与者交互普遍特征的同时,还能够表达不同类型交通个体交互行为差异的能力。框架首先使用统一的仿真逻辑捕捉交通个体的交互过程,从整体上体现拟人化的交互决策过程;同时,框架中各个部分的具体操作模型分别从感知范围、决策逻辑、运动参数等方面,区分不同类型的交通个体,分别刻画异质交通个体在交互过程中感知、决策及执行层面的差异。据此,模型各层具体主要任务及工作流程如下:在感知层中,当前交通个体根据当前自身运动状况和交通环境,在多种类型的其他交通个体中识别和选择当前时刻的交互对象,并将交互选择结果传入决策层;决策层根据交互选择结果和当前的交通状况,为当前类型的个体生成符合其运动需求的行为决策;执行层基于行为决策结果的指导,更新当前交通个体的关键运动参数(例如,速度、加速度、转向角等),控制仿真个体实现横、纵向耦合的二维交互和运动的模拟。在模型顶端,将交通环境信息和当前交通个体的初始路径作为输入提供至模型[13],并作为指导当前交通个体运动方向的依据。
2 交互模型构建
2.1 感知层建模
感知层的主要作用是解决某一时刻当前交通个体究竟可能和谁交互的问题。在交叉口共享空间中,通常会同时存在多个与当前交通个体存在冲突的其他客体,当前交通个体n往往依据冲突的紧急程度,依次与这些冲突个体进行交互[3]。同时,在二维平面上交通个体之间的冲突交互及冲突位置往往是动态变化的。因此,在寻找冲突交互对象时,模型需要具备准确捕获动态交互特征的能力。为此,本文提出一种二维平面交互对象选择方法。该方法的步骤包括:(1)筛选潜在交互个体;(2)基于所确定的潜在交互个体,寻找冲突并确定相应的冲突交互个体;(3)根据各个冲突的紧急程度,选择当前交互对象m。其中,在步骤(2)中,模型基于当前交通个体n此时的行为运动轨迹,寻找该轨迹与其他交通客体运动轨迹的重合位置,以此确定冲突交互关系。该轨迹基于每个仿真时刻的行为决策结果,不断更新迭代从而动态调整和生成,在满足交通动态性特征描述需求的同时,还能保证当前交通个体n根据其交互决策结果合理运动。冲突交互的动态特性如图2所示。
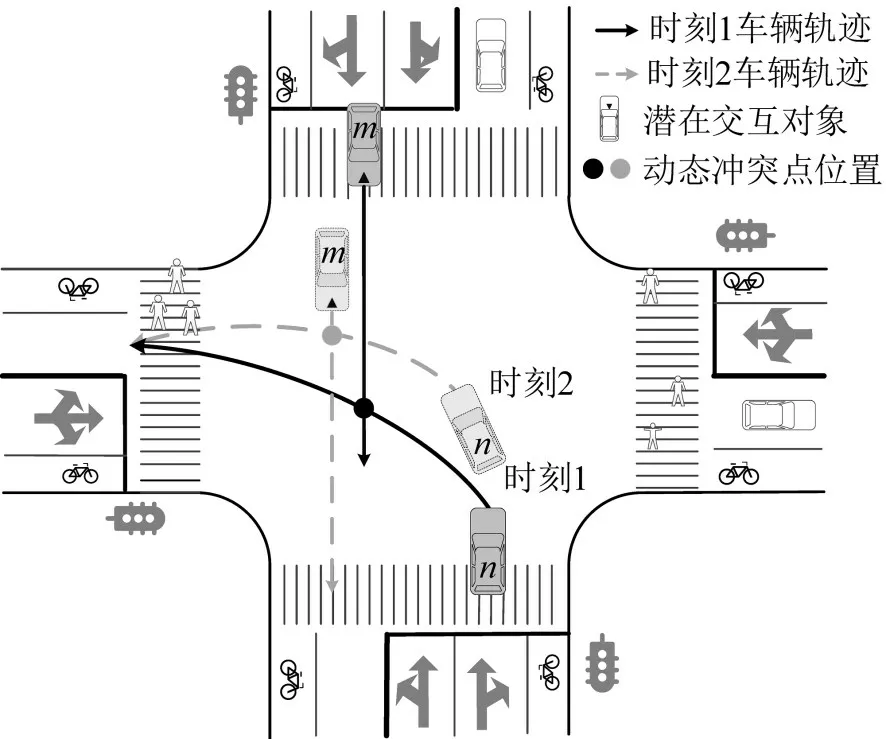
图2 冲突交互的动态特性Fig.2 Dynamic feature of interactions.
2.1.1 潜在交互个体筛选
潜在交互个体指可能会对当前交通个体的运动产生影响的客体[3]。本文引入个体视野范围的概念,模拟交通个体视野注意力机制,以此确定当前时刻的潜在交互个体。一方面,个体视野范围直接决定了交通参与者认为哪些周围客体可能会对其运动产生影响;另一方面,个体视野范围能够避免传统仿真中采用遍历方式搜寻交互对象,造成仿真运算效率较低的问题。参考GIANLUCA等[14]的研究,本文个体视野范围被设置为一个以仿真个体为顶点,以其前进方向为对称轴的扇形区域。同时,由于速度被认为是影响交通个体自身对感知范围大小的关键因素[15],因此,基于混合交通流中不同类型的交通参与者(包括:机动车、非机动车及行人)之间明显的速度差异,区分感知范围大小,能够有效地模拟不同类型交通个体在运动过程中对交互关系的认知差异。因此,参考ALEX等[16]对交通个体感知范围的研究成果,视野范围的扇形半径被设置为当前速度的2 倍时距,视野范围角度固定为120°。在确定视野范围后,便可筛选出哪些周围客体进入了当前交通个体的视野范围,并体现不同类型交通个体在感知层面的差别,合理确定潜在交互个体的集合。个体视野感知范围如图3所示。
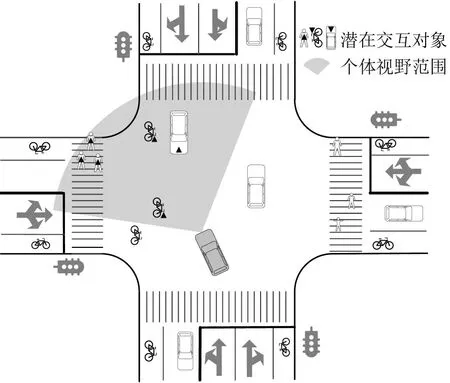
图3 个体视野感知范围Fig.3 Field of view
2.1.2 冲突交互个体识别
基于当前时刻仿真个体的运动轨迹,判断此时其与每一个潜在交互个体之间是否存在冲突风险。本文采用快速排斥法判断潜在交互双方的轨迹是否存在交点,以此确定潜在交互双方是否存在冲突,依次判断所有潜在交互个体与当前交通个体的冲突关系。当冲突被确定后,记录该潜在交互个体和相应冲突点位置信息,相应个体也被认为是当前时刻的冲突交互个体之一。冲突关系判断方法如图4所示。
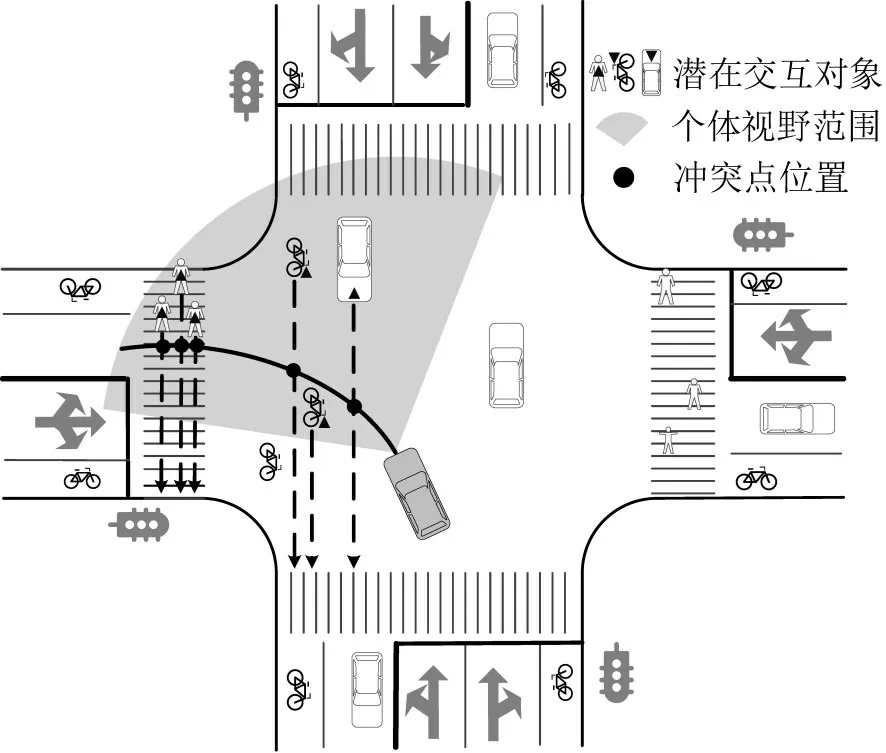
图4 冲突点及冲突个体Fig.4 Conflict position and conflict road user
特别的,当潜在交互双方存在跟驰关系时,冲突是实时存在的。在这种情况下,前方个体将不作为后方个体的冲突对象进行交互,仅看作是跟驰前车,其影响使用相应的速度控制模型体现。跟驰关系计算式为

式中:yn(t)和yj(t)分别为当前时刻t个体n和前方个体j在前进方向上的位置;rn为当前个体n自身的宽度和安全距离之和。
2.1.3 交互对象确定
确定与当前交通个体存在冲突的全部冲突交互个体后,结合碰撞时间(Time To Collision,TTC)计算各个冲突的紧急程度。根据当前交通个体与每个冲突交互个体之间的冲突位置和速度情况,首先计算潜在交互双方各自以当前状态到达冲突点的TTC 大小;随后,以当前时刻碰撞风险最大(即TTC 最小)的冲突作为需要优先处理的交互,将相应的冲突个体确定为当前时刻的交互对象。考虑到交叉口共享空间中存在多种流向交通流间的交互,在计算TTC 时,还需要考虑潜在交互双方可能的位置关系情况。参考SAUNIER 等[17]的研究,本文TTC的计算式为
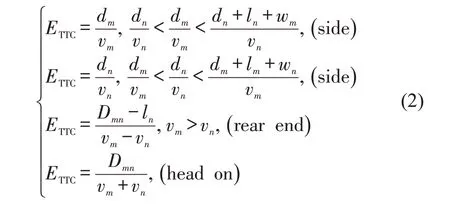
式中:ETTC为当前交通个体n到冲突点的TTC;dn为当前交通个体n到冲突点的距离;dm为交互对象m到冲突点的距离;Dmn为交互双方间的距离;vn,vm分别为n和m的速度;ln,wn分别为个体n的长度与宽度;lm,wm分别为交互对象m的长度与宽度。TTC计算方法示意如图5所示。
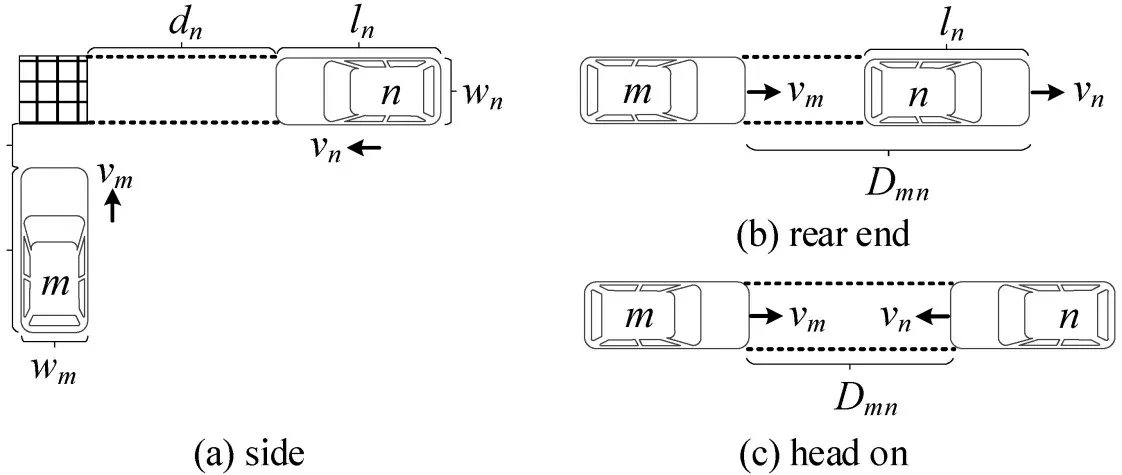
图5 TTC计算方法示意Fig.5 Schematics of calculations of TTC
通过在计算到达冲突位置的TTC时,考虑交通个体的宽度和长度,模型不仅能够表达不同交通个体体积大小对于冲突程度的影响,同时,还能够描述混合交通流中不同交通个体之间的交互持续时间差异。例如,当冲突发生在行人和机动车之间时,考虑个体长度和宽度的影响,能够保证行人在穿越机动车车头范围时,机动车始终判定与该人存在冲突,进一步避免传统仿真工具中仅考虑“固定点冲突”而不是“动态面冲突”的缺陷。
2.2 决策层建模
基于交互对象选择结果,根据当前交通环境状况,决策层在每个时刻为当前交通个体选择合适的行为,处理和当前交互对象之间的交互,避免碰撞。本文基于规则的方法构建交互行为决策模型,以分别考虑不同类型交通个体之间交互模式的差异。模型中可选择的行为决策结果包括:让行行为、跟驰行为以及自由行驶行为。模型具体的决策逻辑如下:
Step 1 输入当前个体n和交互对象m的速度vn和vm,以及冲突点位置信息(x,y)。
Step 2 判断交互双方个体类型信息,本文以机动车、非机动车以及过街行人作为主要模拟的交通个体。
Step 3 若交互为机-非交互或非-人交互,则执行此步骤。当前交通个体n首先判断以当前自身速度能否率先通过冲突点。若当前交通个体n的TTC大于交互对象m的TTC,则当前个体n减速让行,并执行让行行为模型;否则,决策结果为自由行驶,追求自身期望速度通过冲突点,执行自由行驶行为模型。
Step 4 若交互为机-人交互,行人存在优先通行权,则执行此步骤。如果当前交通个体n为机动车,将选择减速让行行人,并执行让行行为模型;否则,选择自由行驶行为,追求自身期望速度通过冲突点,执行自由行驶行为模型。
Step 5 若交互双方类型相同(即:机-机、非-非、人-人交互),重复Step 3。
Step 6 若当前交通个体n和交互对象m之间存在跟驰关系,选择跟驰行为,执行跟驰行为模型。
Step 7 决策结果输出至执行层。
2.3 执行层建模
基于行为决策结果,执行层控制仿真交通个体执行相应的动作。考虑到交叉口共享空间内部交通个体的运动往往具有横、纵向耦合的连续性特征,因此,提出一种二维运动控制模型,控制交通个体实现在二维平面上的运动。在每一个仿真时刻,决策层输入当前时刻的行为决策结果,执行层模型据此依次计算并产生在当前时刻交通个体执行相应的决策行为所需要的行为轨迹、行为加速度以及转向角,共同控制交通个体按照当前行为决策结果执行交互和运动。执行层基于决策结果,不断迭代更新每一仿真时刻完成相应决策动作所需要的轨迹和运动参数。每一时刻更新的轨迹,又作为仿真个体的新运动轨迹传递至下一仿真时刻,影响下一次的交互判断过程,从而为确定动态冲突交互及冲突位置奠定基础。执行层的工作流程如图6所示。
图6 二维运动控制方法示意Fig.6 Schematics of motion control method
2.3.1 行为轨迹规划
在仿真初始阶段,每个交通仿真个体都会获得一条引导其由起点运动向讫点(Origin to Destination,OD)的初始轨迹。若该交通个体在通过交叉口共享空间的过程中不存在任何交互,该轨迹将指导其运动。但绝大多数情况下,交通个体会与周围客体发生交互,从而对其行为和路径进行调整以保证安全。因此,模型还需要根据每一时刻的行为决策结果,对个体轨迹进行不断调整,从而在运动过程中引导仿真个体根据交互决策结果完成运动和交互。
本文基于每一仿真时刻的行为决策结果,通过为每一种决策结果指定相应的临时目的地,并据此调整和规划1条新运动轨迹的方法,引导仿真个体在当前时刻产生相应的交互动作,最终实现交互运动过程的模拟,如图7所示。

图7 行为轨迹规划示意(以转向机动车为例)Fig.7 Schematic of trajectory planning(taking turning vehicle as an example)
所规划轨迹由当前位置、行为临时目的地及交叉口出口道内讫点依次首尾相连构成。其中,行为临时目的地可以有效引导当前仿真个体按照相应行为决策结果产生运动[4]。在每一时刻,当前仿真个体会根据上述方法获得1 条全新的交互行为运动轨迹,随后计算生成相应的行为加速度和转向角,并沿着该轨迹执行运动。运动轨迹基于决策结果动态迭代更新,不断调整和规划,引导仿真个体在每一仿真时刻完成相应的动作。即新的轨迹又被个体储存并传递至下一时刻,用以判断该个体的交互关系状态。同时,根据上一时刻所生成的运动轨迹,当前交通个体判断其与周围客体之间是否仍然存在冲突,并计算获得相应冲突点的位置。通过这种方式,能够合理地模拟交叉口内交通个体在处理交互时,冲突位置不断发生变化的特点,克服传统仿真冲突位置固定的缺陷,动态地判别冲突交互位置,使交互更加接近真实情况。最后,考虑到需要保证轨迹的平滑性和连续性,本文采用贝塞尔曲线(Bezier Curve)在每一个仿真时刻为仿真个体规划新的运动轨迹。
贝塞尔曲线是基于伯恩斯坦多项式的数学曲线,通过若干给定位置的控制点,能够在任意点之间根据特定曲线参数方程生成一条光滑曲线。该曲线已在智能汽车轨迹规划方法中得到广泛使用[3]。鉴于计算成本会随贝塞尔曲线参数方程的阶数增加而增加,采用较低阶数的曲线是优选的。因此,本文使用三阶贝塞尔曲线生成连续曲率最小的曲线作为轨迹,参数方程为

式中:B(z)为轨迹点集合;Pc为个体的当前位置;Pt为行为临时目的地;Q1为第1 控制点;Q2为第2控制点;z为控制轨迹点个数的参数。其中,第1控制点Q1和第2控制点Q2被分别设置在当前位置Pc和目标点Pt速度方向处或其反向延长线上。Q1和Q2具体位置的计算表达式为

式中:(XQ1,YQ1)为第1控制点Q1的坐标;(XQ2,YQ2)为第2 控制点Q2的坐标;(XPc,YPc)和(XPt,YPt)分别为Pc和Pt的坐标;D为曲线首尾位置间的距离;θ为当前个体的航向角;β为当前个体前进方向与PcPt连线之间的夹角;ε为航向角指向关系指数,。
本文涉及的行为决策结果有跟驰、让行和自由行驶行为。3种行为相应的行为临时目的地设置规则如下:①对于自由行驶行为,将临时目的地设定为当前仿真个体的最终目的地,即讫点;②对于让行行为,将临时目的地设定为当前交互对象头部位置;③对于跟驰行为,将临时目的地设置为当前仿真个体前方跟驰对象的尾部位置。每种行为的临时目的地如图8所示。
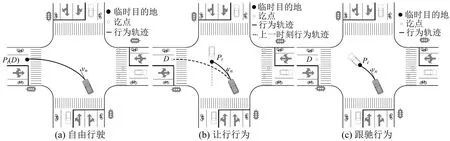
图8 行为临时目的地示意Fig.8 Schematics of intermediate destinations of different behaviors
2.3.2 行为加速度计算
基于行为决策结果,计算当前时刻执行该行为所需要的行为加速度。在交叉口共享空间中,交通个体的行为包括:跟驰、让行以及自由行驶3 种。每一种行为所对应的运动模型不同。
(1)自由行驶行为模型
本文自由行驶行为是指交通个体不受冲突干扰驶向讫点的行为。此时,交通个体往往会将自身速度维持在期望速度水平或追求期望速度。因此,本文借鉴HELBING等[18]提出的社会力模型中驱动力的形式作为自由行驶行为模型,其公式为

式中:as(t)为自由行驶加速度;vd为期望速度;vn为当前速度;τs为速度变化的松弛系数。
(2)跟驰行为模型
已有研究已经提出了许多种跟驰模型[19]。其中,由TREIBER 等[20]开发的智能驾驶员模型(Intelligent Driver Model,IDM)被广泛应用于机动车仿真,并取得了较好的效果。该模型也被应用于一项非机动车跟驰行为实验中,其有效性和适用性也得到了证明[21]。因此,本文选择IDM模型作为跟驰行为模型,其公式为
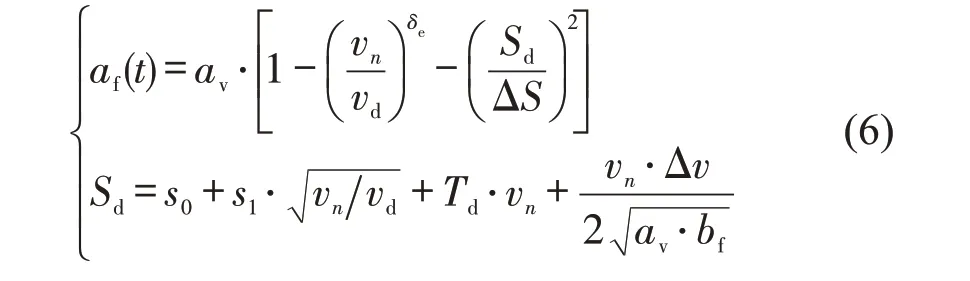
式中:af(t)为本车跟驰加速度;Δv为本车与前车速度之差;ΔS为与前车距离车头到车尾;Sd为与前车的期望距离;Td为期望车头时距;av为起步加速度;bf为舒适减速度;δe为加速度指数;s0为静止安全距离;s1为与速度有关的安全距离选择参数。
(3)让行行为模型
若当前个体无法率先通过冲突点,将发生让行行为。此时,在避免碰撞意识的支配下,当前交通个体会尽可能快地降低速度甚至停车。因此,对于让行行为,合理的操作是以冲突点位置为让行目标,以尽可能大的减速度降低速度。考虑到IDM模型在控制仿真个体避撞方面存在优势性[19],本文仍然采用IDM 模型作为让行行为模型。此时,仿真中以冲突点位置设置虚拟车辆,并将其作为跟驰逻辑前车,以此计算当前交通个体完成让行所需的加速度。
上述行为加速度模型还需要针对混合交通流中不同类型的交通个体(包括:机动车、非机动车及行人)进行标定和校准。
2.3.3 转向角计算
在确定行为轨迹和相应加速度后,需要确定沿轨迹执行相应行为所需要的转向角大小。本文仿真个体转向角控制采用基于阿克曼几何模型(Ackermann Model,AM)的轨迹追踪方法(Pure Pursuit,PP)[22]得以实现。该方法以交通个体车头位置为切点,前进方向作为切线,通过不断计算和改变转向角,使交通个体能够平顺地沿轨迹前进。转向角计算公式为

式中:φn(t)为当前时刻转向角;L为当前交通个体的长度;ld为前视距离;ω(t)为当前交通个体与目标点连线与其前进方向之间的夹角。在此,机动车、非机动车和行人的前视距离ld分别被设定为0.5,0.2,0.1 m,以此保证转向角变化率的平顺和连续。
3 仿真实现与模型应用
3.1 仿真测试平台搭建
为测试所提交互模型的有效性,并验证其应用在虚拟测试中的效果,本文搭建了一套仿真测试平台,并针对典型混合交通流交叉口共享空间场景,在平台中构建虚拟测试仿真环境。该平台由场景、路网构建模块和背景交通流仿真模块组成。其中,交通流仿真模块为平台提供背景交通流,控制背景交通流个体的运动和交互。场景/路网搭建模块等使用Vires 软件,构建虚拟测试环境,为车辆控制、环境感知等算法提供接入的可能。由于通信仿真和驾驶人仿真不是本文涉及的重点,在此并未进行讨论。通过Python实现通讯接口,并将交通流仿真和场景、路网构建模块相连接,实现地图路网在上述模块中的匹配,完成背景交通流注入虚拟测试环境的功能。仿真平台的工作逻辑如图9所示。
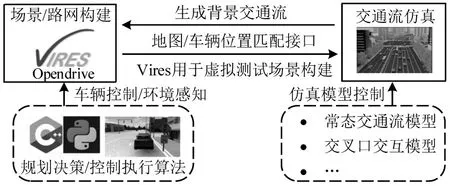
图9 仿真测试平台工作逻辑Fig.9 Framework of simulation platform
路网是仿真测试平台中实现交通流仿真功能的基础支撑。本文旨在为智能汽车虚拟测试提供可靠背景交通流模型,因此,该仿真平台基于虚拟测试最常用的Opendrive 路网数据构建[11]。Opendrive 路网主要由若干link/connector 构成。对于每1个link,其上包含了多条车道;而connector则通常作为连接器,连接其上、下游两个link 上的车道。在每次仿真开始前,仿真平台根据所获得的Opendrive 路网的hadmap/OpenDRIVE 数据进行格式转换和数据读取,并将路网信息赋予每个仿真个体,实现仿真交通流在Opendrive 路网中正常运行。所读取的数据主要包括:车道连接情况,上、下游关系及车道位置信息等。
本文选择位于上海市浦东新区高科中路的连续交叉口作为仿真实现地点。该地点属于典型混合交通流交叉口共享空间,其内部存在大量异质交通流,交通个体间交互明显,相互干扰十分严重。
仿真测试平台中交通仿真流程如图10所示,仿真步长为0.1 s。其中,仿真过程还应包括交通个体到达模型、信号灯反应模型以及一系列基础的常态交通流模型,例如,跟驰、换道模型等,都是仿真实现的重要组成部分,和本文构建的交叉口共享空间交互模型相互配合,共同实现交通流仿真。
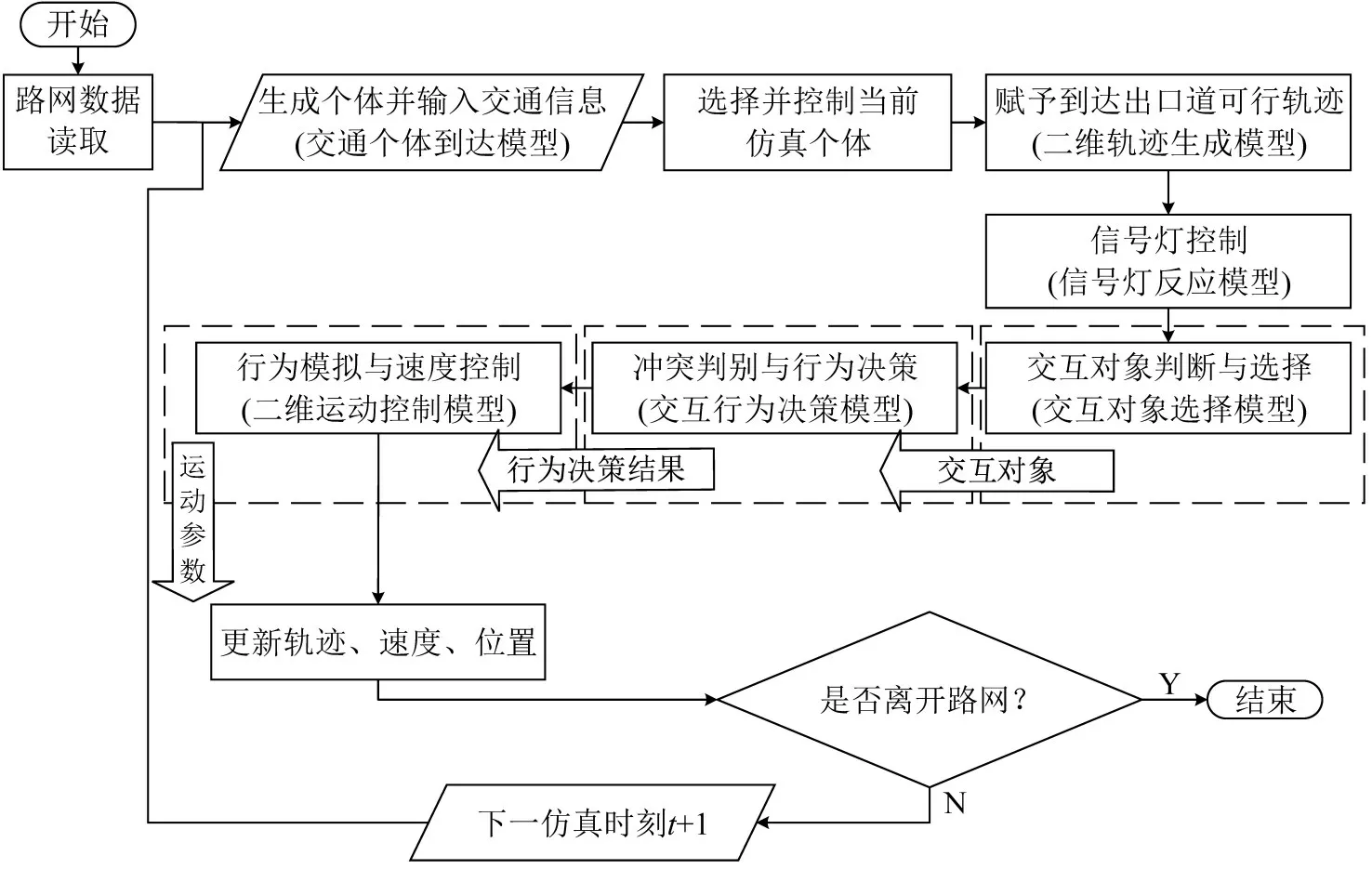
图10 交通仿真流程Fig.10 Flowchart of traffic simulatio n
3.2 仿真参数设置
所提交互模型存在部分需要标定的参数。这些参数主要分布在行为加速度的计算过程中,涉及自由行驶模型(1 个参数)和跟驰行为模型(5 个参数)。参考ZHU 等[23]给出的模型参数范围建议,使用交叉验证的方法,并结合该模型在虚拟测试仿真平台中的实际应用效果,针对混合交通流中不同类型的交通个体,本文在仿真中各运动模型参数取值如表1所示。
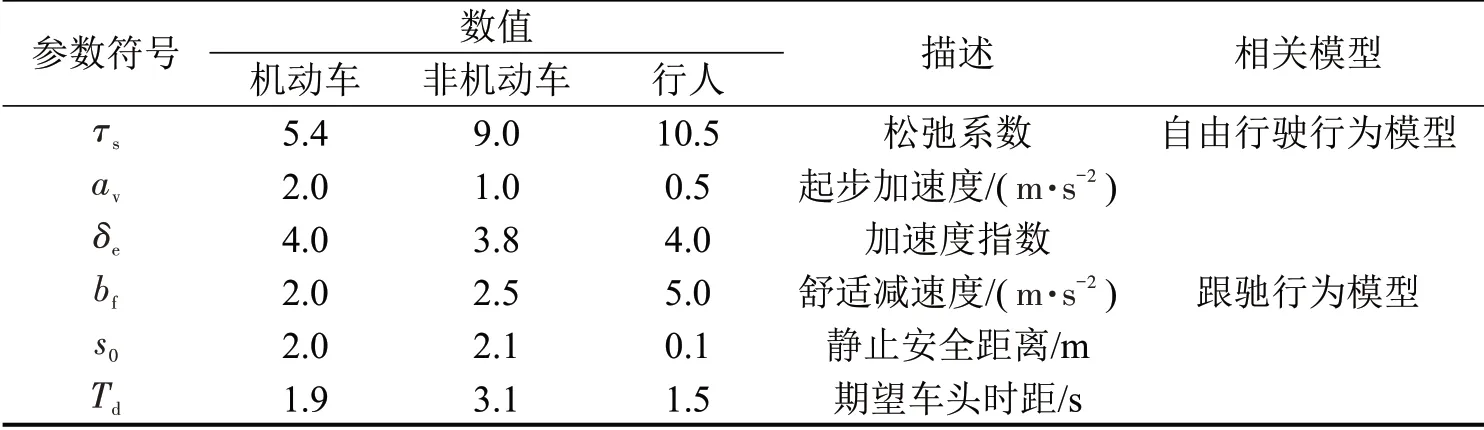
表1 模型参数取值表Table 1 Values of parameters in proposed model
3.3 仿真效果应用
利用上述仿真平台,在虚拟测试环境中所实现的机-非交互、机-人交互等场景案例如图11所示。
图11(a)中为1 辆直行机动车与1 辆直行非机动车的冲突交互过程。在t1=0 时,该机动车和非机动车之间存在冲突,此时,交互双方根据当前交通状况进行决策,从t1=10 时可以得知,该机动车选择减速让行,等候非机动车通过,非机动车则保持自身速度继续行驶。图11(c)为1 辆直行机动车和过街行人的冲突交互过程。当该直行机动车进入交叉口共享空间后,由于此时存在尚未清空的过街行人,该直行机动车主动选择减速让行该行人,待行人通过其车辆范围后,该机动车起步继续行驶。由图11可知,来自各个方向的机动车、非机动车以及行人进行合理的交互,在所提模型的控制下,均能够按照实际情况进行行为决策判断,与实际情况十分接近。因此,可以认为所提模型在模拟交叉口共享空间中交通个体交互方面具有较好的效果,并能够服务于虚拟测试,为智能汽车提供更为接近现实的交通流场景。
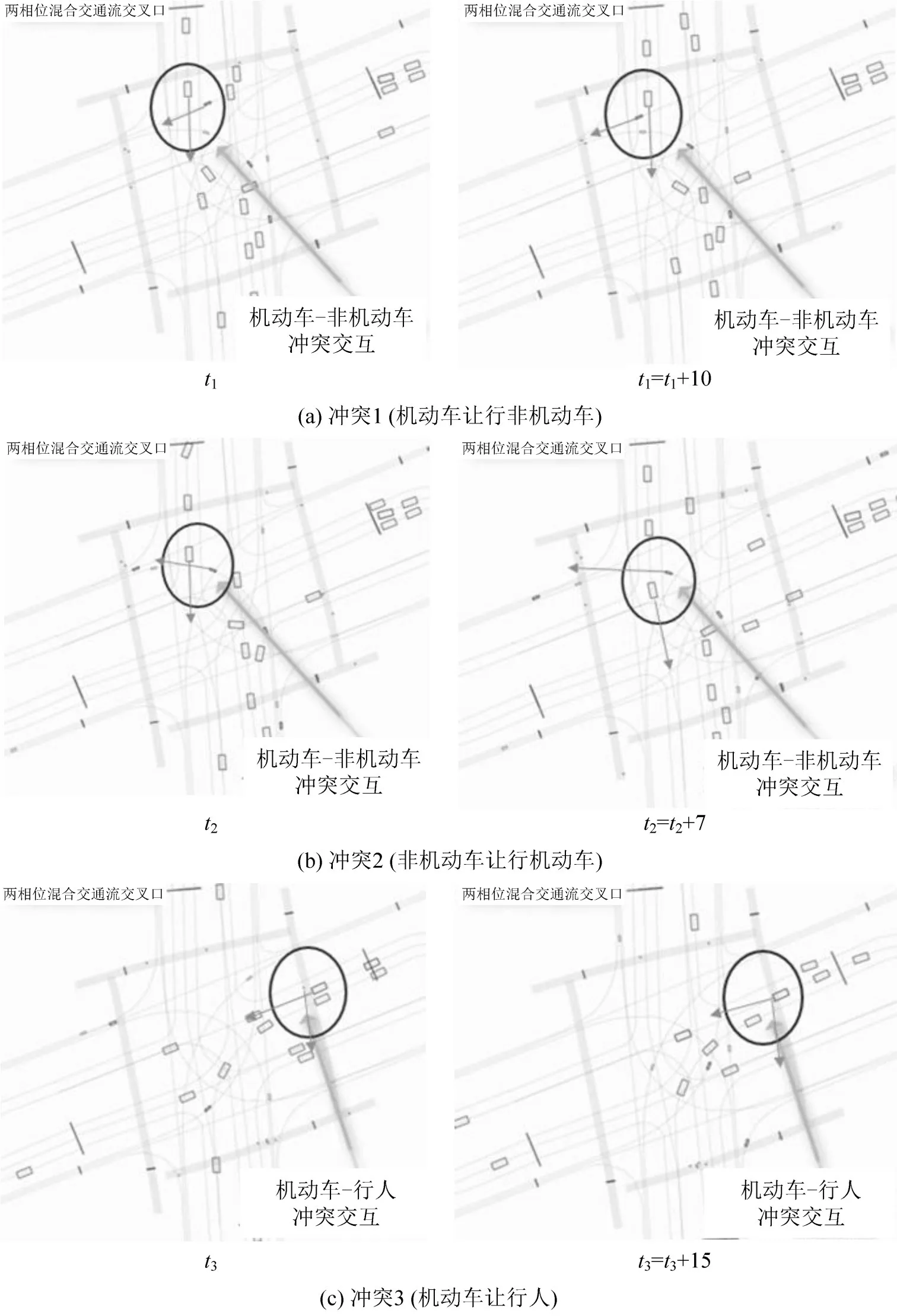
图11 仿真场景复现示意Fig.11 Schematics of simulation scenarios
4 结论
为准确刻画交叉口共享空间中混合交通流的交互过程,为智能汽车虚拟测试工具提供真实可靠背景交通流模型,本文建立了一种面向虚拟测试的混合交通流交叉口共享空间交互行为模型,并搭建了一套虚拟测试仿真平台测试模型使用效果。仿真结果表明,所提模型能够较好地复现混合交通流中不同类别交通个体之间的冲突交互。本研究主要结论和创新点如下:
(1)本文基于Opendrive高精度路网,构建了一套虚拟测试仿真平台,为虚拟测试注入更为真实的背景交通流。针对典型混合交通流交叉口共享空间场景构建测试环境,将所提交互模型加载至虚拟测试环境中进行验证。仿真结果表明,模型能够在适应智能汽车虚拟测试环境使用需求的同时,服务于为其提供更加接近真实情况的背景交通流环境,有效解决现有虚拟测试仿真工具缺乏真实模拟背景交通流运动和动态交互能力的问题,为虚拟测试注入真实可靠背景交通流的途径提供了新的解决思路。
(2)本文提出了一种通用的混合交通流交叉口共享空间交互行为仿真框架模型。框架模型基于人类行为认知过程构建,模拟交通个体从感知、决策直至执行的交互全过程,具备通用化模拟混合交通流中多类型交通个体冲突和交互的能力,提高了模型的普遍适用性;同时,在仿真框架的指导下,还针对不同类型交通个体在感知范围、决策逻辑以及运动参数控制等方面加以区分,能够描述交通个体类型差异所导致的运动和交互异质特征。模型能够复现交叉口共享空间中混合交通流中交通个体的真实交互过程,满足了虚拟测试对于背景交通流的模拟需求。
(3)所提混合交通流交叉口共享空间交互模型,基于交互双方行为决策结果所迭代更新的运动轨迹,动态判别冲突点位置,克服了传统仿真模型和虚拟测试背景交通流中冲突点预先设置的缺憾,满足了复现冲突交互复杂动态性特征的需求;同时,模型所使用的基于运动轨迹的横、纵向耦合二维运动模拟方法,使得模型突破了虚拟测试背景交通流中,基于车道运动的一维建模局限性,满足了智能汽车虚拟测试在二维平面上高准确度模拟交通个体运动和交互的需求,提高了测试模拟的真实度和可靠度。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
现代营销·信息版(2020年2期)2020-02-14 15:44:50
小学教学参考(语文)(2019年5期)2019-06-24 06:36:22
科技创新导报(2019年6期)2019-06-11 03:10:51
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
北京教育·高教版(2016年12期)2017-01-10 00:35:23
西南交通大学学报(2016年3期)2016-06-15 20:29:35
中国工程咨询(2016年1期)2016-02-14 06:47:44