考虑驾驶行为异质性的城市快速路合流区仿真模型
2022-06-30 09:19:12帅斌米荣伟张锐雷渝
交通运输系统工程与信息 2022年3期
帅斌,米荣伟,张锐,雷渝
(西南交通大学,交通运输与物流学院,成都 611756)
0 引言
合流区是由机动车、道路、驾驶人等因素构成的复杂系统。为提高合流区运行效率,缓解合流区拥堵现状,学者们对合流区交通运行特性进行深入研究。YUAN 等[1]基于驾驶模型器研究交织区长度、交通状况、驾驶人特征及驾驶人强制换道行为关系。但较难反应驾驶人自身特性和不同车辆占有率下道路运行状况等问题,因此,学者们尝试利用元胞自动机进行深入研究,KONG 等[2]提出了考虑卡车和小型汽车驾驶行为差异性的元胞自动机模型。邓建华等[3]提出了考虑换道冲突异质性策略,车辆状态随机更新的元胞自动机模型。XIANG 等[4]针对车辆频繁换道现象对经典的对称双车道模型(BL-STCA)进行改进,提出了考虑动态换道概率的BL-STCA模型。
上述研究以城市快速路为情境对合流区交通特性展开建模分析,但针对驾驶行为异质性在合流区内的交通仿真研究相对缺乏。为刻画车辆在道路中不对称换道及瓶颈区抢道行为,Kong等[5]提出了车-卡车组合的元胞自动机模型,通过数值仿真验证该模型可以再现自由流、同步流、阻塞的3 种交通状态。NI等[6]以加速度和安全距离为基础,提出了车辆加速度服从连续分布函数的城市元胞自动机模型。在既有研究中,大量学者对异质驾驶行为参数采用人为标定,通常标定结果较为主观;部分学者尝试使用无人机和模拟驾驶系统收集驾驶行为特征数据,但在实践过程中却较难真实、全面收集路面所有车辆信息,影响模型参数标定效果。
综上所述,本文以典型城市快速路合流区为情境,利用美国NGSIM 数据对驾驶行为特征参数进行聚类分析,基于聚类结果构建合流区元胞自动机多级换道决策模型,并对仿真模型进行检验与分析。
1 基于轨迹数据驾驶行为分类
1.1 数据简介
美国联邦公路署为开发新一代交通微观仿真系统(NGSIM),收集了洛杉矶US101、加利福尼亚州I-80、Lankershim Boulevard 及Peachtree Street 这4条道路详细车辆轨迹数据,其中,I-80和US101为美国高速公路,Lankershim Boulevard 和Peachtree Street 为城市道路(含多个交叉口)。考虑到国内收集轨迹数据较为困难,且精度较低,本文采用I-80路段合流区的车辆行驶轨迹数据分析驾驶行为特征。
1.2 车辆轨迹数据处理
加利福尼亚州I-80 路段车辆轨迹数据由固定摄像机拍摄,并由NG_Video 处理而成,因为,数据收集过程中受到环境和测量仪器结构等因素干扰,所以,轨迹数据测量值与真实值存在一定误差。为降低误差对驾驶行为分析结果的影响,本文采用Kalman滤波算法对数据进行降噪处理。卡尔曼滤波标准形式由状态转移方程和观测方程构成,其中,状态转移方程是假设系统t时刻的状态是由t-1 时刻状态演变而来;观测方程是根据系统t时刻估计状态和系统误差,计算t时刻系统的观察值,即

因为,NGSIM 数据采集过程时间间隔为0.1帧,所以,数据源本身精度较高,并且在大量研究中输入控制矩阵经常省略,故本文的控制输入矩阵为零矩阵。在式(1)和式(2)中,因为,实际数据误差具有高度离散性和随机性,所以,误差协方差矩阵较难准确标定,根据其他学者处理思路[7],本文采用回归模型估计系统状态方程和观测误差协方差矩阵。卡尔曼滤波算法主要包含两个部分,第1部分是预估系统状态取值和系统协方差取值;第2部分是根据实际观测数据,修正第1部分估计出的系统状态取值和系统协方差取值,NGSIM 速度数据滤波结果如图1所示。

图1 车辆速度滤波结果示意Fig.1 Schematic diagram of vehicle speed filtering results
卡尔曼滤波结果与实际数据对比如图2和图3所示。为更好地评估卡尔曼滤波算法对NGSIM轨迹数据的处理效果,本文选择相对均方根误差(RRMSE)、相对平均离差(RMAD)、最大误差及误差标准差这4个指标评价滤波结果[7-8],即
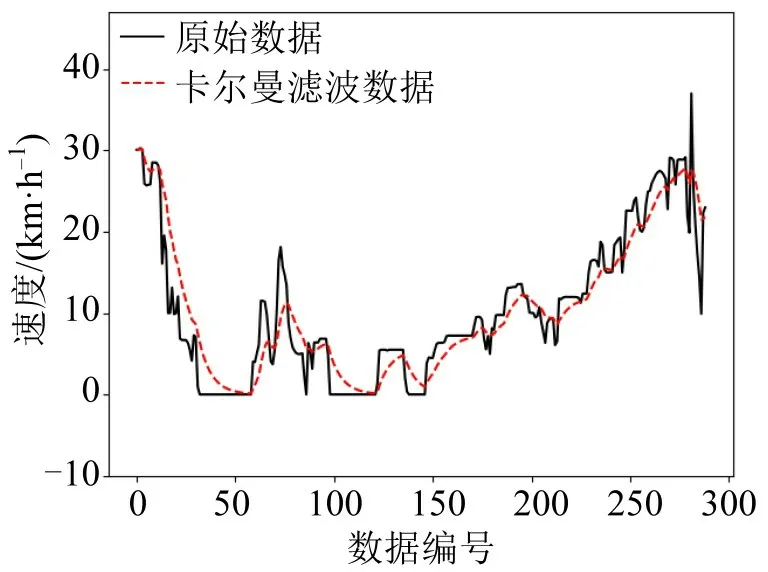
图2 速度滤波结果与实际数据比较Fig.2 Comparison of speed filtering results with actual data
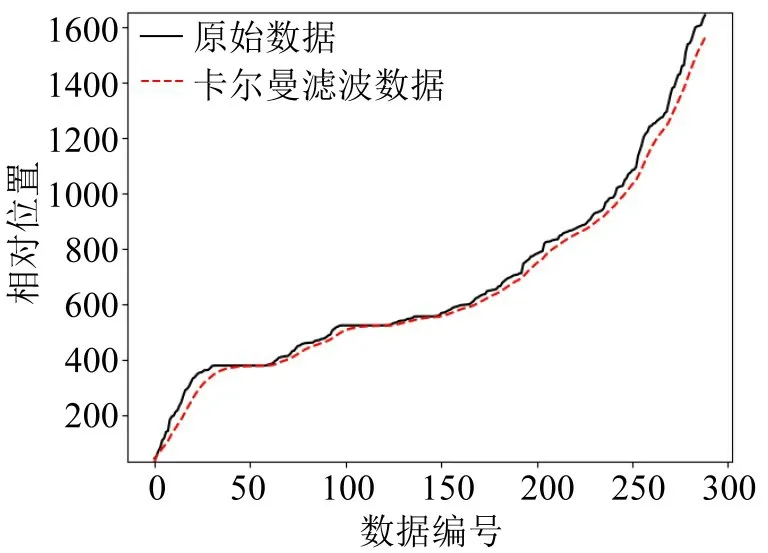
图3 车辆位置滤波结果与实际比较Fig.3 Comparison of vehicle position filtering results with actual
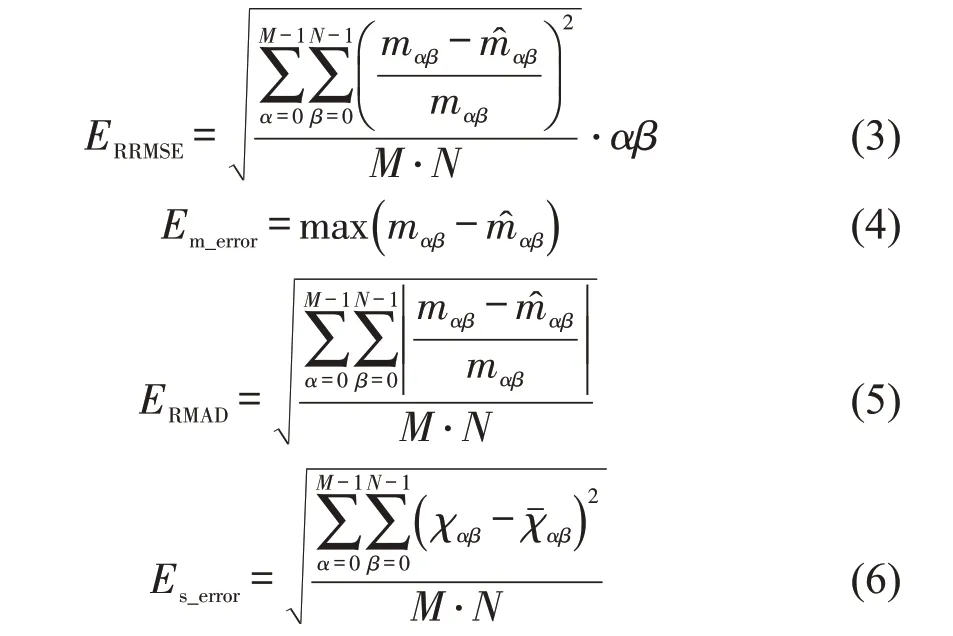
根据式(3)~式(6),使用卡尔曼滤波算法对NGSIM 数据滤波结果与实际数据偏差如表1所示。
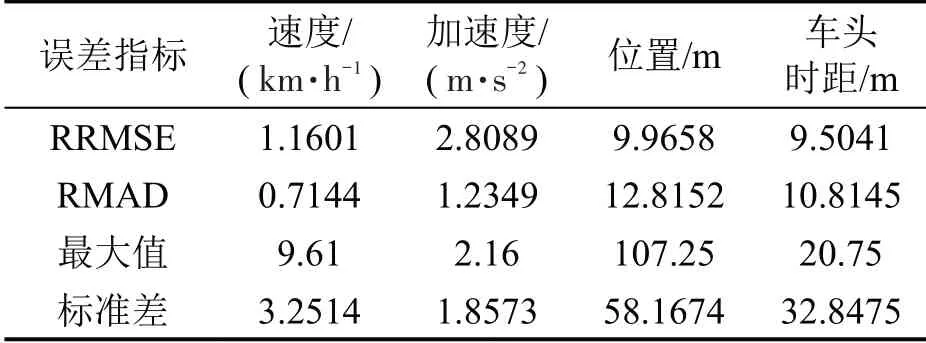
表1 滤波数据误差表Table 1 Evaluation of filtered data
通过误差统计分析发现,位置和车头时距的误差最大值较大,其原因是NGSIM 数据集中位置和车头时距数据均以“m”为单位,实际数据采集值均在千米左右,在滤波过程中为了保证车辆轨迹连续性,部分“拐点”数据将产生较大误差。车辆位置数据主要用于车辆时空轨迹可视化,车辆车头时距数据主要是为安全车头间距提供参考取值。上述两类数据对元胞自动机模型影响较为有限,本文元胞自动机模型主要以车辆平均速度为初始输入,后续元胞将在仿真情景内按照规则进行自主运行,所以,速度平均误差1.1601 km·h-1和加速度平均误差2.809 m·s-2均可以接受,数据滤波后的车辆时空轨迹如图4所示。
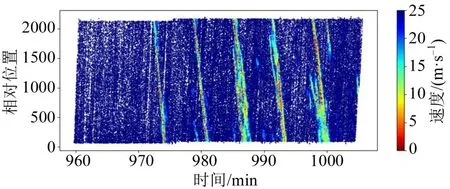
图4 车辆轨迹数据滤波结果时空轨迹Fig.4 Time-space trajectory diagram of vehicle trajectory data filtering results
1.3 驾驶行为参数分类
从宏观角度看,车辆行驶过程主要包括跟驰行为和换道行为,基于NGSIM数据中车辆轨迹数据,跟驰行为由最大速度、平均速度、平均加速度及车辆随机慢化概率这4类参数表示;换道行为由向左换道概率、向右换道概率、安全车头时距及速度感知度这4 类参数表示。因为,上述8 个参数指标可以较全面体现驾驶行为特征,与元胞自动机模型结合较为灵活,各参数之间的相关性较弱,所以,选择I-80路段合流区内车辆轨迹数据进行统计,建立驾驶行为数据库。部分参数计算如表2所示,表中,Hcll为向左换道的频数,Hclr为向右换道的频数,Hcl为车辆在合流区换道总频数,t为车辆在合流区行驶时刻(s),T为车辆通过合流区总时间(s),Vi为第i时刻的车辆速度,Vmax为车辆行驶过程中最大速度,Vlim-min为道路最低限速值,Vlim-max为道路最高限速值,Psls为非换道情景下降速的频数,Psl为车辆在合流区总共降速频率。
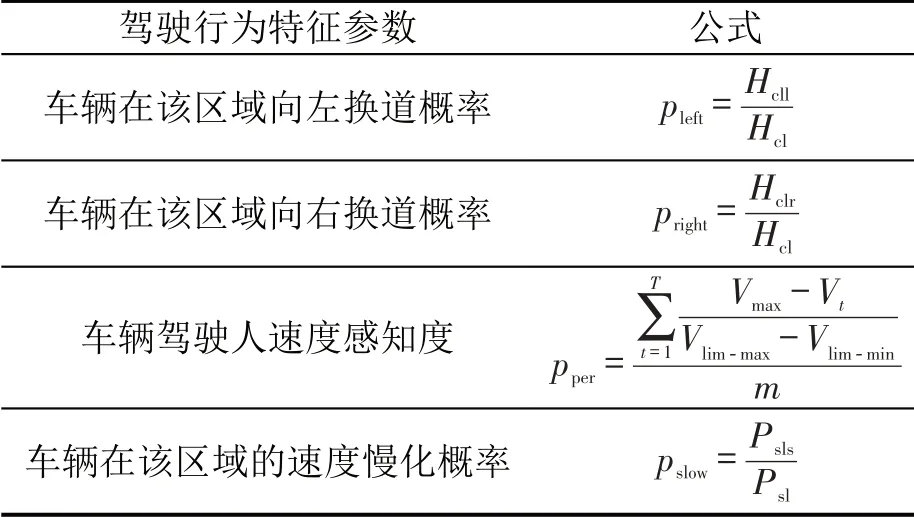
表2 驾驶行为参数数据表Table 2 Data table of driving behavior parameters
为保证聚类算法高效性和准确性,本文选取K-Means 算法对驾驶行为特征数据库进行聚类分析,核心算法为

式中:K为聚类簇数;为两点之间的距离;E为数据集中所有对象的误差平方和;p为空间中的点,表示给定的数据对象;ce为各簇的形心。
该算法从数据集中选择K个对象作为初始簇中心,根据簇中心值进行数据分类,后计算E值,更新簇中心重复上述过程直到式(7)收敛时,此时认为数据集的聚类效果达到最优停止迭代。在使用KMeans聚类的过程中,因为需要将分类簇数作为输入数据,所以,为保证K-Means算法聚类精度,本文选择轮廓系数确定聚类效果评价指标,基于轮廓系数值确定最佳聚类簇数,即

式中:a为数据集中的一个样本,Sa为样本a的Silhouette 测度值;ba为样本a到其他类内样本平均距离的最小值;aa为样本a到其所属类内其他样本距离平均值。
目前,部分学者选择对驾驶行为参数统一进行聚类,这样提高了聚类效率,但是弱化了各类参数的特征。为了使数据特征更加具有代表性,本文对上述参数独立聚类并按照顺序组合,最终得到各类驾驶行为的参数取值。在聚类过程中,每一个驾驶行为参数取值在各簇中都可以计算得到一个Silhouette 测度系数,为了保证样本整体聚类效果,利用平均Silhouette测度值作为评价指标,即

式中:为样本聚类结果轮廓系数;m为样本点的数量。
将各参数的Silhouette 测度平均值绘制成曲线,如图5所示。
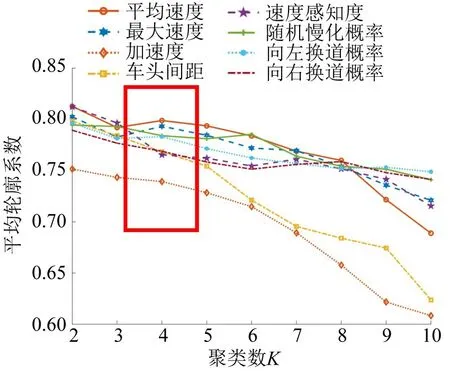
图5 平均轮廓系数值与聚类数K 关系Fig.5 Relationship between average profile coefficient value and number of clusters K
由曲线效果可知,各类参数均在K=2 时取得最大值,在K=10 时取得最小值。其中,4类参数的平均轮廓系数在K取3~6 时,下降趋势较为平缓,平均速度、最大速度在K=4 时取得极大值,加速度平均轮廓系数在K取3~4时基本持平,考虑到后续元胞自动机建模需求,本文将驾驶行为分成4类并对其进行分析,驾驶行为特征参数聚类结果如表3所示。
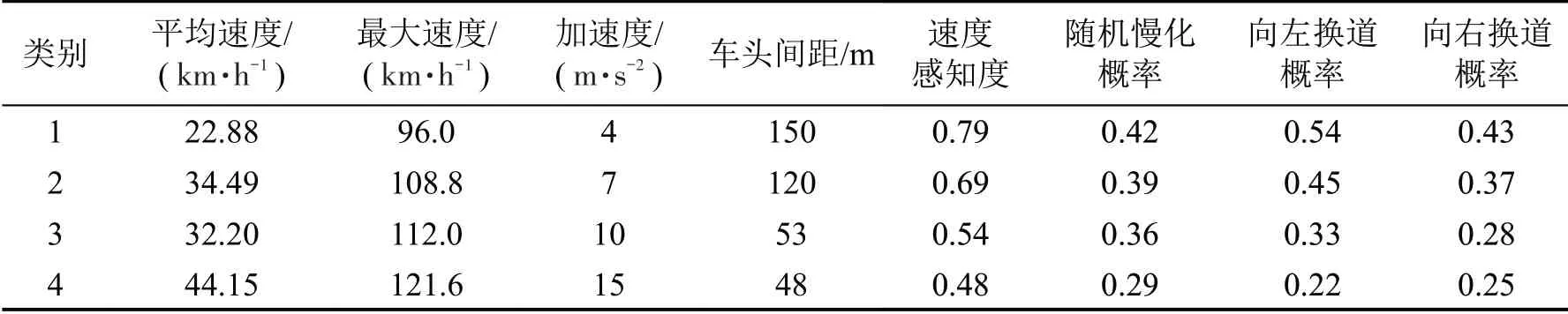
表3 驾驶行为特征值聚类结果表Table 3 Table of clustering results of driving behavior characteristic values
(1)保守-谨慎型
该类驾驶行为在合流区中行驶速度较小,虽然有时无法满足速度期望收益,但是该类驾驶行为不会通过换道方式提高行驶车速。
(2)激进-谨慎型
该类驾驶行为虽然在合流区行驶车速较大,但是无法满足自身速度期望时,该类驾驶行为不会通过换道行为提高行驶车速。
(3)保守-轻率型
该类驾驶行为在路段上行驶速度适中,当无法满足自身速度期望时,该类驾驶行为会通过换道行为改变行驶车速。
(4)激进-轻率型
该类驾驶行为在路段上行驶速度较大,当无法满足自身速度期望时,该类驾驶行为会通过换道行为提高行驶车速。
2 构建仿真模型
2.1 合流区区域及车道设置
基于多车道分区的建模思想,仿真场景由11个路段和3 个区域构成。(1)合流区上游路段共包含3个路段(1车道、2车道、3车道、匝道汇入上游为10 车道),其受合流区路段影响较小,区域编号为N1。(2)合流区路段(4 车道、5 车道、6 车道),共包含4条道路,该区域内车辆受匝道合流车辆影响较大,区域编号为N2。(3)合流区下游共包含3 个路段(7车道、8车道、9车道),其受合流区的影响较小,区域编号为N3。多车道合流区域如图6所示。
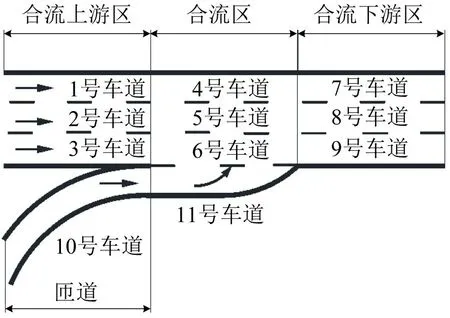
图6 多车道合流区示意Fig.6 Schematic diagram of multi-lane confluence area
2.2 车辆演化规则
在城市快速路合流区,车辆跟驰行为包括4部分:车辆正常加速,正常减速,不确定因素的随机慢化及车辆位置更新,车辆换道行为包括:生成换道动机,判断换道条件,执行换道及车辆位置更新。在数值仿真中每一个元胞将被赋予一类驾驶行为属性,保证车辆演化过程中的差异性,对应的符号变量如表4所示。
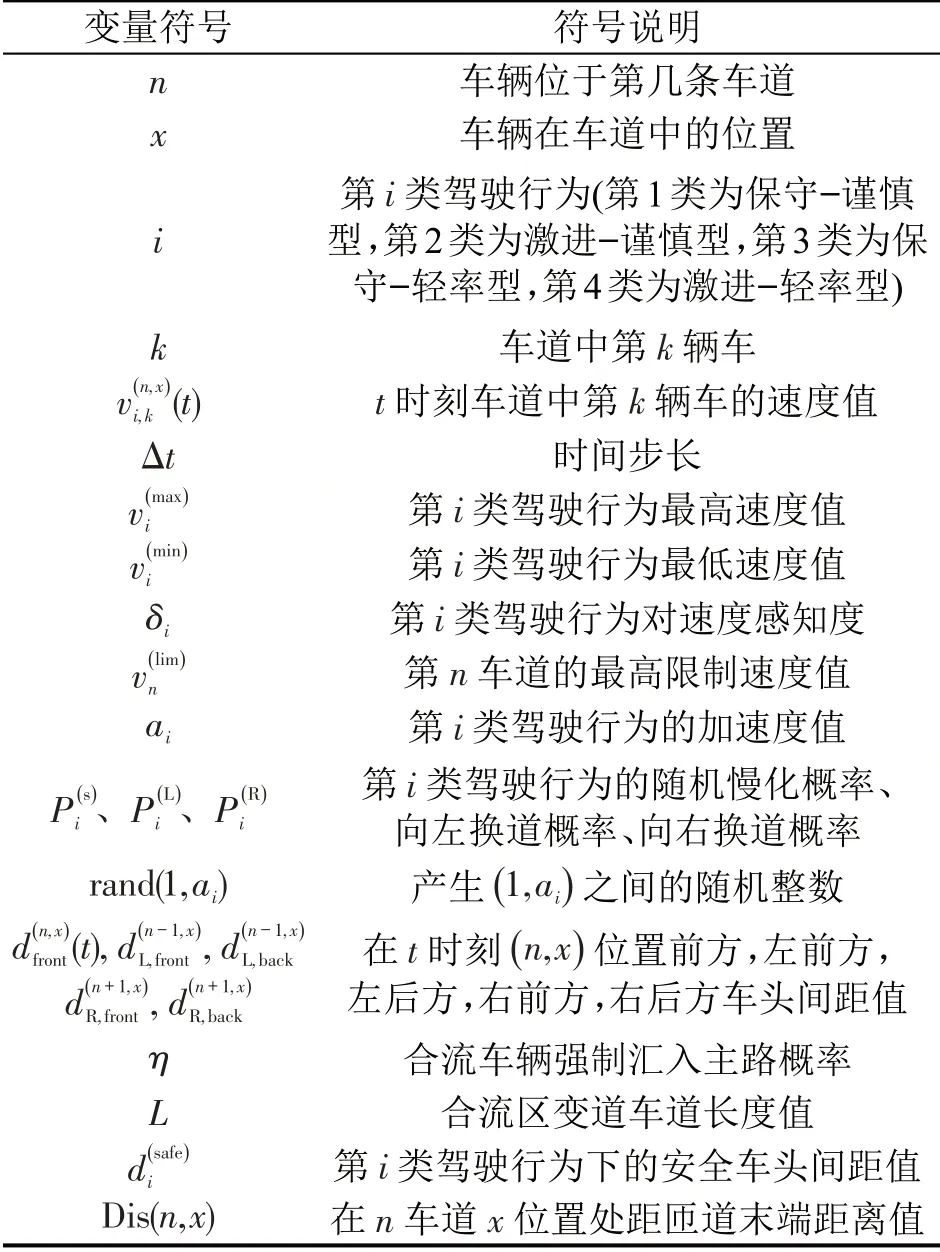
表4 符号变量说明Table 4 Symbol variable description
2.2.1 车辆跟驰规则
根据驾驶行为特征的差异性改进车辆跟驰规则,车辆加速规则充分考虑车辆正常加速,车头间距判断,驾驶人对速度感知状况以及道路交通管制措施等;车辆减速规则考虑车辆正常减速,车头间距判断,驾驶人对速度感知等;在随机慢化时,当随机数大于随机慢化概率,车辆开始进行随机减速。
加速为

减速为

随机慢化为

位置更新为
2.2.2 车辆换道规则
快速路主线车道车辆和匝道汇入车辆在合流区交汇,使得合流区交通组织较为混乱。在城市快速路合流区上、下游区域主要以自由换道为主,驾驶人往往会选择车间距较大、车辆数较少的车道以获得更大速度和安全性。因为,在合流区内受到汇入车辆的干扰,车辆通常被迫进行车道改变以保证驾驶安全及行驶速度,所以,合流区内车辆主要以自由换道和强制型换道为主。故在合流区上、下游区域与合流区内换道动机产生以及换道间距判断有着较大差异,所以,分别建立不同换道行为演化规则。
(1)合流区上、下游换道模型
①换道动机产生
车辆位于N1与N3区,当车辆在下一时刻的速度大于前车间距并且速度大于前车速度时,车辆产生换道动机,即

②换道间距判断
在合流区上、下游路段,1 路段、4 路段、7 路段车辆位于快速路内侧,只能向右侧换道;2 路段、5路段、8路段位于快速路中部,则可以向左和向右换道;3 路段、6 路段、9 路段位于快速路外侧,只能向左侧换道。车辆在换道过程中需要判断相邻车道,前、后车之间的距离是否满足换道条件,即
合流区内车辆需要在较短距离换道至目标车道,为了汇入主线车道或者躲避汇入车辆,可能采取低速换道,降速换道,在匝道可能存在停车换道等危险驾驶行为。为有效反映合流区车辆换道机理,准确模拟驾驶人换道间距判断和换道概率决策过程,换道间距判断基于换道安全性分为四级判断:自由型换道、鲁莽型换道、强制1型换道及强制2型换道。
(2)合流区换道模型
①换道需求产生
车辆位于N2 区时,当前车车辆速度小于当前车速并且当前车头间距小于下一时刻车辆行驶距离时,车辆产生换道动机,即
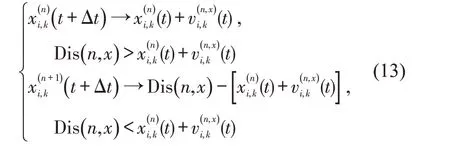
当匝道车辆驶入合流区时,因为存在汇入车辆速度相对较低,主线车辆未避让的情况,所以,车辆在匝道换道需求产生和车辆与车道末端距离有较大关系,具体规则为

②换道间距判断
车辆在合流区内换道过程中,认为驾驶人均为理性驾驶人,换道决策过程由自由型、鲁莽型、强制1型、强制2型逐级进行判断,当出现符合换道条件时,车辆将退出换道间距判断条件,每一级决策内容如下。
自由型:车辆目标车道的前车间距、后车间距均较大,并且与前、后车速度相近,换道过程中可以保证车辆行驶安全,车辆可以进行车道变换。向左、向右换道分别满足条件为
鲁莽型:车辆与车辆目标车道的前车距离较小,与目标车道的后车距离较大,并且车辆行驶速度小于前车速度以保证行驶安全,车辆进行车道变换。向左、向右换道分别满足条件为
强制1型:车辆为躲避在合流区中突然换道的车辆,车辆与目标车道后车的间距较小,与前车间距较大,同时,该车速度大于目标车道后车速度,小于目标车道前车速度,该类换道模型风险较高,需要目标车道后车进行避让以保证行驶安全。向左、向右换道分别满足条件为
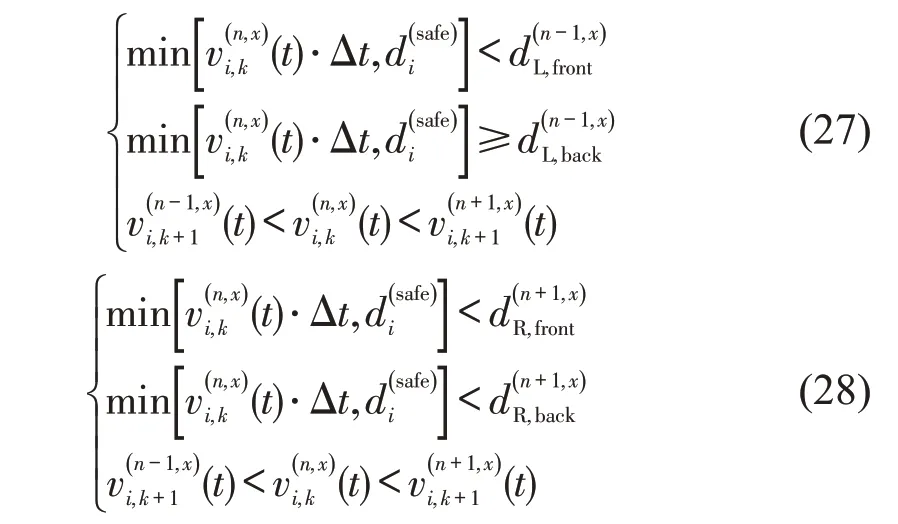
强制2型:在合流区的过程中车辆受到汇入车辆影响,或者汇入车辆逐渐行驶到加速车道末端,为保证车辆行驶安全,车辆与目标车道前、后车的间距较小,不考虑与前、后车辆速度之前的关系,进行车道变换,该类型换道风险最高,对车辆运行有较大干扰,通常发生在6 号车道和11 号车道。向左、向右换道分别满足条件为

合流区上、下游区域及合流区内车辆位置更新规则一致。在现实生活中,驾驶人往往满足换道条件情况下仍然愿意在目标车道行驶,故车辆在满足换道动机产生和换道间距判断的前提下,计算机将产生随机数进行换道概率决策,即

在合流区内为了保证驾驶安全,当换道间距判断进入强制2 型时,将不进行换道概率决策,直接进入位置更新,其余情况应当通过换道决策后,车辆进入位置更新。
③位置更新
换道位置更新时,默认车辆的纵向位置不发生变化并且车辆位置只发生横向偏移,为保证换道后车辆行驶安全,车辆速度将再一次更新,车辆换道位置更新规则为

3 仿真验证与分析
3.1 仿真参数设置
为保证模型内车辆是同步更新,本文建立了车辆、路段、道路空间一一映射关系,具体过程是:首先,根据车辆空间占有率生成固定车辆并给车辆赋予驾驶行为属性(车道、位置、初始速度、各驾驶行为参数);然后,随机给定每辆车初始位置,并建立元胞C和空间Q的一一映射关系,每个迭代阶段遍历所有元胞C即可完成对元胞空间中所有车辆的同步更新。
结合NGSIM提取I-80高速公路车辆轨迹数据分析结果,为便于分析各类异质驾驶行为对车辆微观运行状态的影响,设置元胞长度为5 m,车辆长度为1 个元胞(即5 m),合流区长度为50 个元胞(250 m),合流区上游区域为150 个元胞(750 m),合流区下游区域为100个元胞(500 m),模型单位时间步长为1 s。合流区车辆占有率从0.01以0.01的间隔增加至0.99,模型采用周期性边界设定。为保证仿真结果的可靠性,每一种车辆占有率都要根据第10000~10500 步时迭代运行结果,计算所需区域的平均速度、平均流量、平均密度等。各类驾驶行为参数如表5所示。
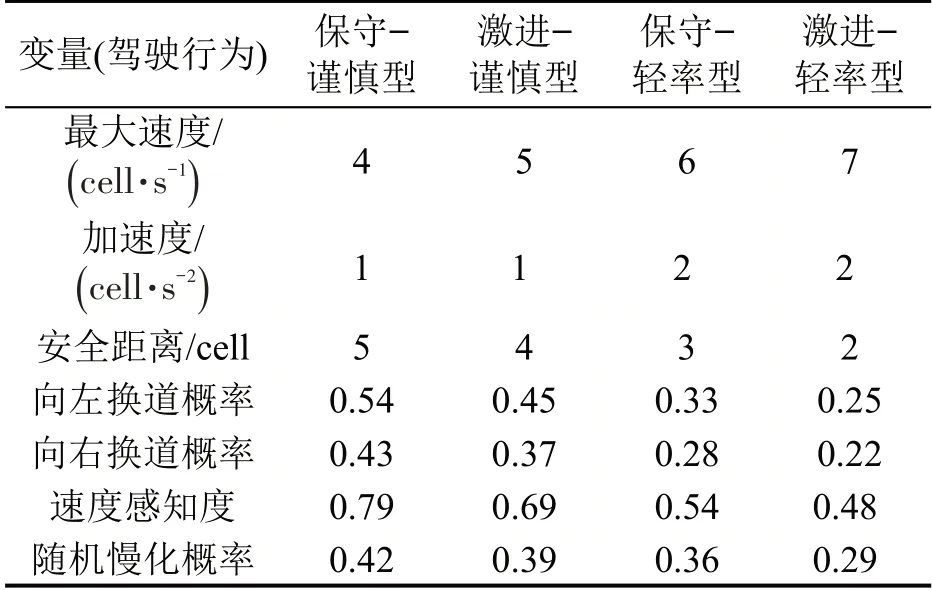
表5 驾驶行为参数取值表Table 5 Value table of driving behavior parameters
3.2 模型运行效果分析
3.2.1 道路交通宏观基本图
根据车辆演化规则进行仿真,设置同质驾驶行为情境和异质驾驶行为情境(各类驾驶行为占比均为25%)。仿真过程中,统计空间占有率从1%~99%条件下,合流区(4车道、5车道、6车道)的流量、平均速度及密度,如图7和图8所示。

图7 车辆流量-密度-速度时空图(同质)Fig.7 Space-time diagram of vehicle flow-density-speed(homogeneous)
由图7 可知,车辆以同质驾驶行为行驶时,在低密度、高速度值的自由流状态数据较为离散,并且车辆密度在0.10~0.25 区间内存在部分数据缺失。由图8 可知,车辆以异质驾驶行为行驶时,部分数据仍有不连续缺失,但是数据整体效果优于同质驾驶行为,并且异质交通流最高流量相比同质交通流高出27.1%。在同质车流状态下车辆以相同方式运行,当一辆车受到不确定因素干扰,极易形成阻塞波向上游传播,导致车队从自由流状态突变成阻塞状态。而在异质车流状态下,由于各类车辆换道执行条件、速度的不同会有效减缓阻塞波向上游传播速度以及传播距离,因此,考虑驾驶行为异质性元胞自动机仿真模型可重现更多的道路交通状态。
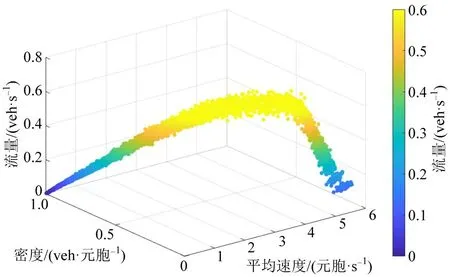
图8 车辆流量-密度-速度时空图(异质)Fig.8 Time-space diagram of vehicle flow-density-speed(heterogeneous)
3.2.2 时空轨迹图
以车辆运行时间-空间轨迹作为研究对象,设置同质驾驶行为情境和异质驾驶行为情境(各类驾驶行为占比均为25%),仿真输入车道占有率为20%,绘制车辆合流区车辆时空轨迹,如图9 和图10所示。
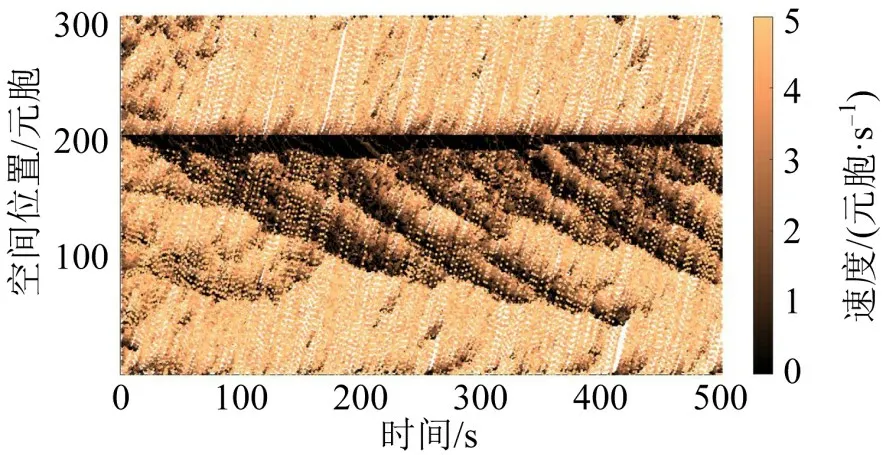
图9 车辆时空轨迹图(同质)Fig.9 Vehicle time-space trajectory diagram(homogeneous)
由图9 可知,在同质交通流情况下,合流区形成瓶颈节点,车辆从该点产生拥堵并且向后蔓延导致合流区上游路段产生严重拥堵。在记录的500 s时间内共发生9次阻塞波,其中,最长影响了150个元胞。由图10可知,在异质交通流情况下,合流区瓶颈有所改善并未形成固定瓶颈节点,在记录的500 s内发生7次阻塞波,拥堵时间相比同质交通流略微减小。当车辆占有率为20%时,在实际快速路合流区并未形成固定瓶颈节点,因此,异质交通流模型可以更加真实模拟合流区车辆运动轨迹。
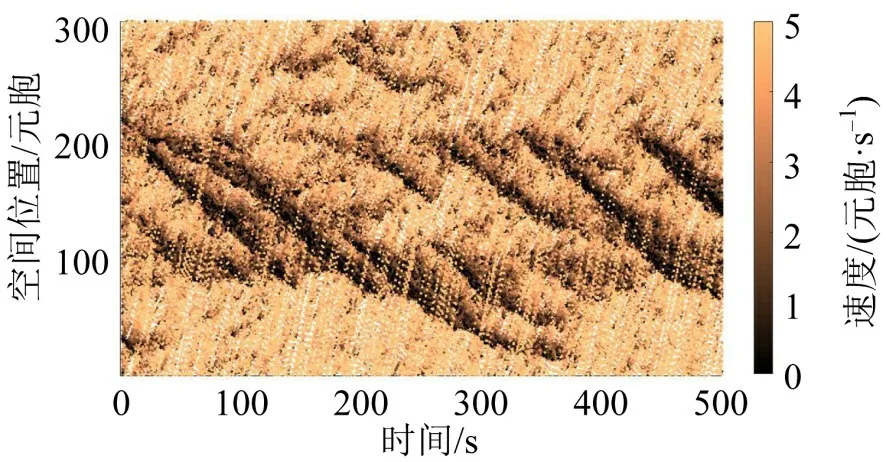
图10 车辆时空轨迹图(异质)Fig.10 Vehicle time-space trajectory diagram(heterogeneous)
3.2.3 换道频率分析
以车辆在路网中的换道频率为研究对象,设置同质驾驶行为情境和异质驾驶行为情境(各类驾驶行为占比均为25%),统计仿真时间为500 s,统计空间占有率从1%~99%条件下,4 号车道、5 号车道、6号车道车辆的换道次数如图11和图12所示。
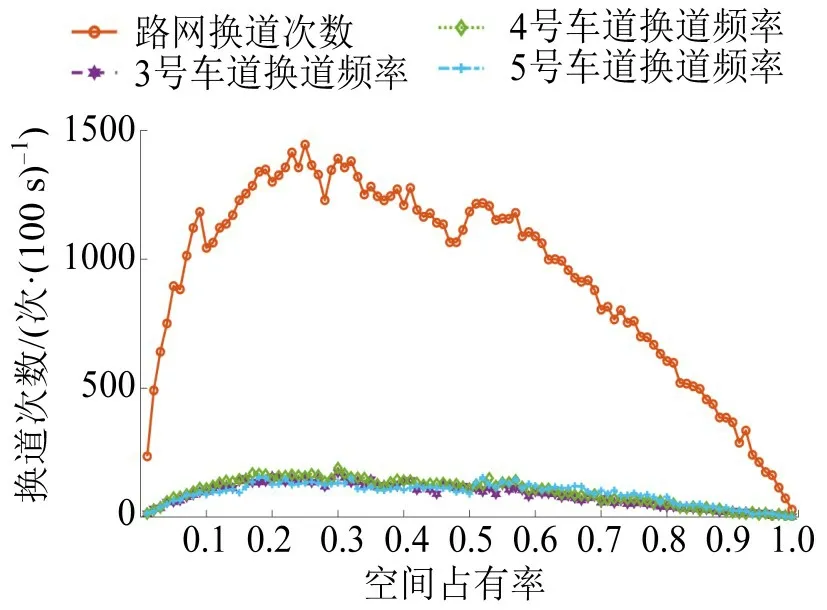
图11 车辆换道频率示意图(同质)Fig.11 Schematic diagram of vehicle lane changing frequency(heterogeneous)
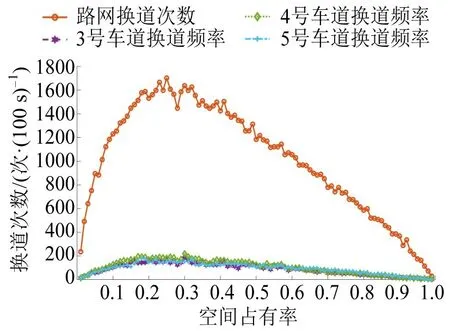
图12 车辆换道轨迹示意图(异质)Fig.12 Schematic diagram of lane-changing trajectory of vehicles(homogeneous)
由图11 和图12 可知,在同质交通流状态下车辆换道频率峰值为1446次·(100 s)-1;异质交通流状态相比同质交通流换道频率高出20.74%,换道频率为1702次·(100 s)-1。当空间占有率为50%~55%时,同质交通流换道次数随着空间占有率增加而增加;异质交通流在空间占有率为20%~99%过程中,换道频率整体呈现下降趋势。通过换道频率趋势可知,异质交通流仿真模型中换道次数异常点的出现频率及数据误差均小于同质交通流仿真模型。
4 结论
为进一步完善城市快速路合流区的交通仿真模型,通过对实际车辆轨迹数据分析,使用聚类分析的手段将其归纳为4类驾驶行为特征,并提供考虑驾驶行为异质性的元胞自动机模型方案。为客观反应车辆运行状态,建立考虑驾驶行为异质性的四级车辆换道决策模型,并采用车辆状态同步更新的思路进行仿真,使得仿真与实际更加贴近。
通过数值仿真发现,与同质驾驶行为的元胞机模型相比,考虑驾驶行为异质性元胞自动机模型可以更好地反应道路自由流、同步流及阻塞流这3种状态,并且为研究道路各状态演化机理与交通系统异质性提供仿真理论支撑。同时,该模型可以为合流区交通运行状态评估,通行能力预测及交通组织与管理提供理论依据与方法支持。
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
戏曲研究(2020年4期)2020-07-22 06:32:22
智富时代(2018年5期)2018-07-18 17:52:04
数学物理学报(2017年5期)2017-11-23 07:51:07
北京测绘(2016年2期)2016-01-24 02:28:28
中华胰腺病杂志(2015年5期)2015-12-08 12:18:13
中国交通信息化(2015年10期)2015-06-06 06:39:31
中国航海(2014年1期)2014-05-09 07:54:25