
复合干扰下永磁球形电机的全阶滑模控制
2022-06-30 06:56王群京李国丽
南京航空航天大学学报 2022年3期
王 松,王群京,2,李国丽,3,文 彦
(1.安徽大学电气工程与自动化学院,合肥 230601;2.安徽大学高节能电机及其控制技术国家地方联合实验室,合肥 230601;3.安徽大学工业节电与用电安全安徽省重点实验室,合肥 230601;4.安徽大学工业节电与电能质量控制安徽省级协同创新中心,合肥 230601;5.安徽大学互联网学院,合肥 230601)
近年来,随着工业技术的快速发展,多自由度球形电机的设计和研究引起了全世界的广泛关注。传统的多自由度伺服装置是通过控制多台单轴电机并结合复杂的齿轮结构来实现的,这不可避免地会导致系统机械结构复杂、体积庞大,造成动态响应慢、精确度降低和缺乏灵活性等问题。为了克服这些缺点,研究人员提出了能在单台电机上实现三自由度运动的球形电机。与传统的多自由度伺服装置相比,球形电机具有结构紧凑、直接驱动和良好的动态性能等优点。
为实现球形电机的多自由度运动,有必要设计具有良好动态性能的控制算法。文献[1]将比例微分(Proportional derivative,PD)控制应用于球形电机中,由于球形电机动力学模型中含有复杂的非线性项,PD 控制的有效性难以保证。文献[2]提出了一种计算转矩控制法,用于解耦和线性化球形电机的动力学模型,但其忽略了建模误差和外部干扰,影响了其控制性能。为了避免依赖精确的动力学模型,文献[3-5]提出神经网络识别和模糊控制器的动态解耦算法,但模糊控制计算量较大,限制了其工业应用。除了智能控制和经典控制外,文献[6]提出了自适应反演滑模控制策略,结合新颖趋近率抑制抖振问题,但传统的反演方法将引起“导数项爆炸”,增加微处理器的计算负担。文献[7]提出了一种动态解耦控制策略,通常动态解耦控制依赖高精度的物理模型,不可避免的建模误差很可能导致令人不满的性能。文献[8]提出了基于动态表面法的鲁棒自适应滑模控制,避免了传统反推方法引起的状态导数项爆炸问题,但自适应在线估计存在较大的估计误差和较长的估计过程,应用于强耦合运动系统通常会导致较差的响应。
滑模控制是一种鲁棒控制方法,具有对建模误差和不确定性干扰不敏感的优点,已广泛应用于非线性系统中[9-11]。传统的滑模控制由于阶数减少,其理想滑动模态不能完整地表达系统的动态特性,因此提出了全阶滑模控制[12]。近年来,提出了一种利用干扰观测器处理干扰和建模不确定性的方法,随着干扰观测器的发展,滑模控制技术与干扰观测器的结合应用得到了研究人员的广泛关注[13-14]。文献[15]提出了一种有限时间干扰观测器,能够在有限时间内快速、准确地提供跟踪干扰能力。
本文针对一种永磁球形电机运动系统,提出了一种基于有限时间干扰观测器的全阶滑模控制方法。有限时间干扰观测器用来估计复合干扰;设计全阶滑模面,使永磁球形电机的理想滑模运动表达其全阶动态特性;设计连续滑模控制律,在控制输入端补偿其复合干扰,获得良好的跟踪性能和动态特性。最后,通过与PD 控制和传统滑模控制仿真对比,验证了所提控制算法的优越性。
1 永磁球形电机结构及动力学建模
1.1 永磁球形电机结构
文献[16]提出的新型永磁球形电机整体结构如图1(a)所示,转子的内部结构如图1(b)所示。该电机主要由一个球形转子、一个由两个半球壳组成的定子以及固定在转子上的输出轴组成。在转子上沿赤道对称均匀分布了4 层永磁体,每层分别有10 个钕铁硼材料的永磁体。这些圆柱型的永磁体镶嵌在转子上,N 级和S 级交错排列。定子上沿赤道均匀镶嵌两层空心线圈,每层共有12 个圆柱型线圈。
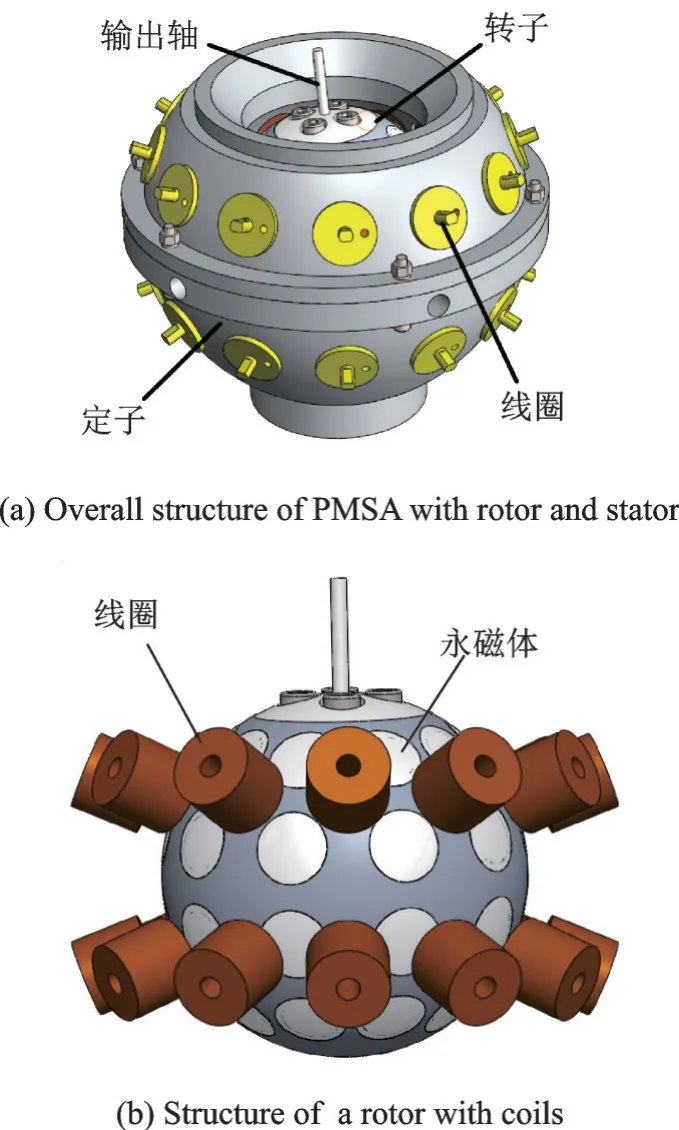
图1 PMSA 的机械结构Fig.1 Mechanical structure of PMSA
永磁球形电机由转子中的永磁体和定子通电线圈相互作用产生的电磁转矩驱动。在期望的线圈通电驱动控制下,转子能够产生相应的转矩实现其倾斜、俯仰和自旋三自由度运动。实验样机如图2 所示。
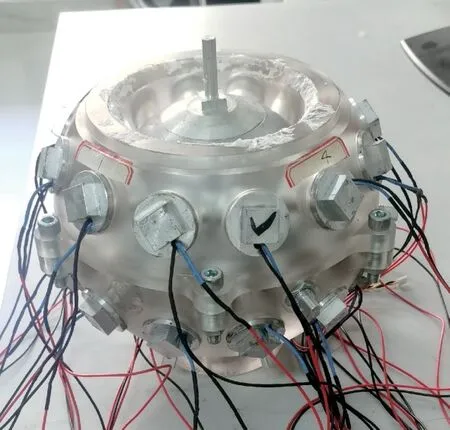
图2 永磁球形电机实验样机Fig.2 Experimental prototype of PMSA
1.2 动力学建模
为建立永磁球形电机的动力学模型,引入定子坐标系XYZ和转子坐标系uvw。坐标系XYZ位于定子球壳上,坐标系uvw固定在转子球体上。转子球所确定的位置变化可以用广义欧拉角(α,β,γ)表示。图3 描述了转子坐标系uvw可由定子坐标系XYZ经过3 次旋转得到。两坐标系之间的旋转变换矩阵Rrs如式(1)所示。

图3 坐标变换Fig.3 Coordinate transformation

结合拉格朗日第2 方程,永磁球形电机的动力学模型为

式中:Iu、Iv和Iw分别表示绕u轴、v轴和w轴旋转的转动惯量。从永磁球形电机的机械结构容易得出,转子沿输出轴方向上是严格对称的,故Iu=Iv≠Iw,设Iu=Iv=Iuv。
永磁球形电机建模过程中,不可避免地会存在建模误差。为了量化建模误差,实际惯性矩阵和实际哥氏力及离心力矩阵分别定义为

式中:r1和r2分别为线性建模误差系数。在实际系统中,这两个系数的范围为-1 <r1,r2<1。
考虑上述因素,将永磁球形电机动力学模型(2)改写为
式中d表示永磁球形电机运动系统中复合干扰力矩

其包括外界干扰,负载力矩和模型不确定性。
式(8)中所定义的数学模型,具有以下性质:
性质1 惯性矩阵M(q)是对称,有界和正定的。

2 控制器设计及稳定性分析
永磁球形电机在操作过程中存在包括外界干扰、未知有效载荷和建模误差等复合干扰,这些不利干扰将会在很大程度上降低永磁球形电机的动态特性。为此,提出一种有限时间干扰观测器,能够使复合干扰的观测值在有限时间内收敛到其实际值。控制器结构如图4 所示。

图4 所提控制器流程图Fig.4 Schematic of the proposed controller
2.1 有限时间干扰观测器
为了设计有限时间干扰观测器,首先,定义永磁球形电机的广义动量为p=M(q)̇,则

将式(8,10)代入式(11),可得

根据有限时间干扰观测器(13),使用收敛分析法检测该干扰观测器的稳定性和收敛性。观测误差定义为
2.2 基于有限时间干扰观测器的全阶滑模控制
基于所提的有限时间干扰观测器,设计基于有限时间干扰观测的全阶滑模控制方法处理复合干扰。首先,定义永磁球形电机系统的跟踪误差为

式中qd分别为期望的轨迹及其角速度。
设计全阶滑模面如下
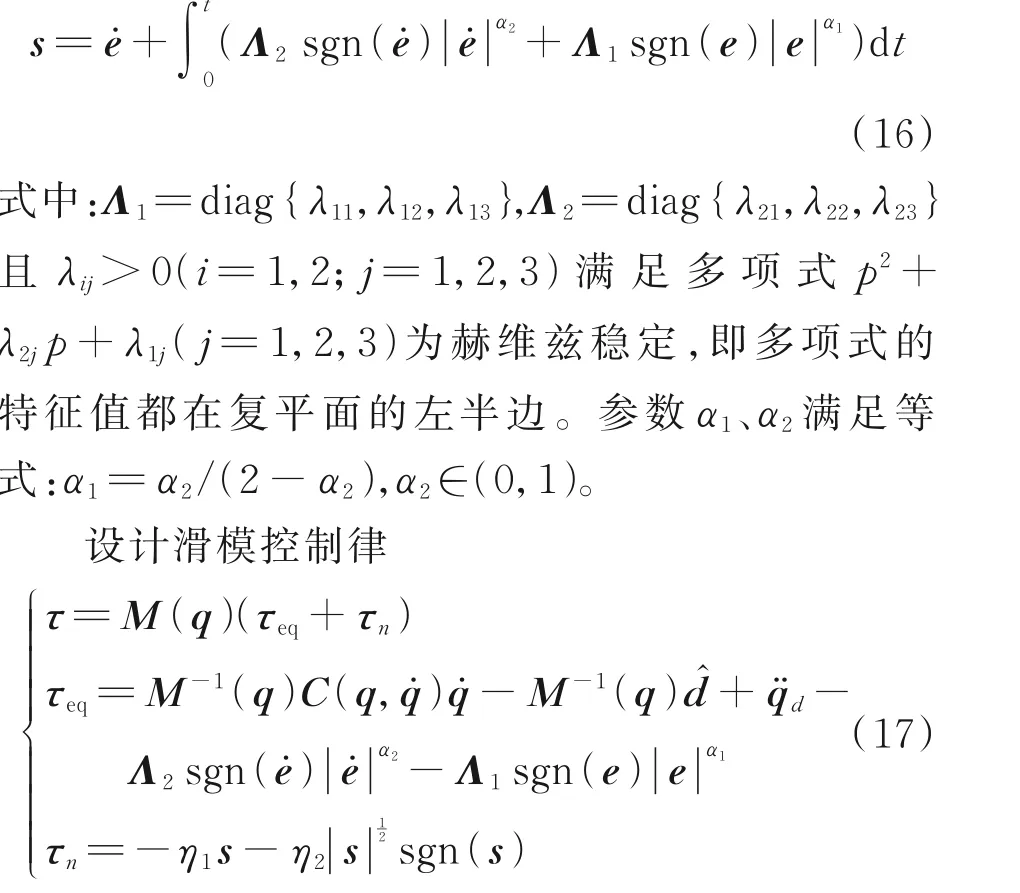
式中η1、η2为正常数。
2.3 稳定性分析
定理1 对于在滑模控制率(17)下具有全阶滑模面(16)的永磁球形电机系统(8),永磁球形电机的轨迹跟踪误差e将在有限时间内收敛到原点。
证明 根据永磁球形电机系统(8)和全阶滑模面(16)获得闭环全阶滑模动态特性。
取全阶滑模面(16)对时间的导数,可得
将控制率(17)代入式(18),得

式中e1=M-1(q)(d-̂)=M-1(q)ed。根据2.1节可知,观测误差ed将在有限时间内收敛到原点,因此e1将在有限时间内收敛到原点。
(1)证明在有限时间内,t<t1,误差e1不会将滑动变量s推动到无穷大。为式(19)定义一个函数

下面,证明式(20)在有限时间内有界。对式(20)求导,得

式(21)表明:V1和s不会在有限时间内发散到无穷大。
(2)证明滑动变量s将在有限时间内收敛到s=0。
因为滑动变量s不会在有限时间内发散到无穷大,又有e1将在有限时间内收敛到原点,当t>t1时,可将式(19)简化为

根据文献[17]可知,滑动变量s及其导数ṡ将在有限时间内收敛到原点。
(3)证明滑动变量s在任意有限时间内不会将误差e,ė驱动到无穷大。
根据全阶滑模面(16),可以得到永磁球形电机系统的误差动态特性

为式(23)定义一个方程

下面,证明V2在有限时间内有界,对式(24)求导,得

(4)证明永磁球形电机的轨迹跟踪误差e将在有限时间内收敛到原点。
一旦满足理想滑模面s=0,永磁球形电机的误差动态方程为

或者为

此时,式(28)是永磁球形电机的全阶动态特性,可以反映出永磁球形电机的全部动力学特征。
如果选择参数α1、α2满足不等式α1=α2/(2-α2),α2∈(0,1),Λ1、Λ2中的元素确保多项式p2+λ2i p+λ1i(i=1,2,3)为赫维兹稳定。则系统(28)可以在有限时间内从任何初始条件沿着全阶滑模面收敛到平衡点[12]。
至此,完成了定理1 的证明。
3 仿真分析
影响永磁球形电机轨迹跟踪性能的两个重要因素:建模误差和干扰。本节主要通过对这两方面进行仿真以评估所提控制器的性能。
根据第1 节中永磁球形电机的实际尺寸和结构参数,仿真计算出其转动惯量

设期望轨迹为
系统的初始条件设置为

根据式(9),将建模误差设置为

外界干扰设置为

式中m为(-0.03,0.03)之间的随机数。
负载力矩设置为

式中,L为负载力矩的系数。
所提控制器参数如下。有限时间干扰观测器增益矩阵选择为Γ1=diag{200,200,200}、Γ2=diag{10 000,10 000,10 000},功率系数选择为a1=0.8,a2=0.9。全阶滑模面增益矩阵选择Λ1=diag{56,56,56},Λ2=diag{15,15,15},功率系数选择为α1=11/13,α2=11/12,η1=5,η2=15。
在相同的期望轨迹和外界干扰下,3.1 节和3.2节分别设计为在相同负载力矩情况下改变模型不确定性和在相同模型不确定下改变负载力矩的仿真实验。为了比较分析,设计了3种控制方案:(1)所提的基于干扰观测器的全阶滑模控制(Finite-time disturbance observer based full-order sliding-mode control FTDO-FOSMC);(2)PD 控制;(3)传统的滑模控制(Sliding mode control,SMC)。
3.1 不同模型不确定性下仿真结果分析
本节将负载力矩系数L设置为0,改变建模不确定性系数r从0.1~0.5。
图5、6 分别显示了3 种控制器在永磁球形电30%建模不确定下的轨迹跟踪响应和跟踪误差响应。从图5、6 可知,存在模型不确定的情况下,PD控制和传统SMC 与本文所提FTDO-FSCM 方法相比,实际轨迹与期望轨迹之间存在较大的误差,在2 s 时,3 种控制方法的欧拉角的稳态误差绝对值分别为0.004,0.008,0.003 1;0.002,0.003,0.001 3和1.2e-5,1.4e-5,1.1e-4。由此可知,本文所提控制方法具有更好的跟踪性能,实际轨迹非常接近期望轨迹。

图5 位置响应(L=0,r=0.3)Fig.5 Response curves of position (L=0, r=0.3)

图6 轨迹跟踪误差响应(L=0,r=0.3)Fig.6 Response curves of tracking error (L=0, r=0.3)
为了更直观地比较3 个控制器的性能,图7 给出了永磁球形电机在3 种控制器作用下稳态误差的均方根误差(Root mean square error,RMSE),其中,负载系数L=0,建模不确定性系数r从0.1~0.5。从图7 可知,当建模不确定系数r=0.3 时,在本文设计的FTDO-FOSMC 控制,PD 控制和传统SMC 的控制下,其欧拉角的稳态误差的均方根误差分别为6.3e-6,6.5e-6,1.0e-5;7.2e-3,7.0e-3,4.5e-3 和1.5e-3,2.9e-4,1.e-3。由此可知,在FTDO-FOSMC 控制策略下,永磁球形电机的跟踪误差收敛精度远大于PD 控制方法和传统SMC方法;且随着r的增大,使用FTDO-FOSMC的系统的稳态误差的RMSE 变化要小于使用PD控制方法和传统SMC 方法。表明在建模不确定下本文设计的FTDO-FOSMC 具有很强的适应性和鲁棒性。
3.2 不同负载力矩下仿真结果分析
本节中,将建模不确定性系数r设置为0.2,负载力矩系数L从1~5 变化。
图8、9 分别显示了3 种控制器在永磁球形电机负载力矩系数L=3 时,轨迹跟踪响应和跟踪误差响应。结果表明在PD 控制和传统SMC 的控制下,存在较大稳态误差,其欧拉角α、β、γ的最大稳态误差绝对值分别为0.015 8、0.014 7、0.030 2 和0.006、0.001 4、0.006 3。而在相同条件下,使用FTDO-FOSMC,其欧拉角稳态误差绝对值不大于5.3e-5,1.3e-4,1.8e-4。

图7 3 种控制器下轨迹跟踪误差的均方根误差(L=0)Fig.7 RMSE of trajectory tracking error under three controllers (L=0)

图8 位置响应(L=3, r=0.2)Fig.8 Response curves of position (L=3, r=0.2)
图10给出了负载转矩系数L从1~5时,3种控制器下稳态误差的均方根误差。显然,FTDO-FOSMC的收敛精度在3 种控制器中最高。例如,当L=3时,在FTDO-FOSMC 控制下,欧拉角α、β、γ的稳态误差的RMSE 为6.2e-6、6.6e-6、1.0e-5。而使用PD 控制和传统SMC 的控制下,其稳态误差的RMSE 分别为9.0e-3、8.2e-3、7.8e-3 和3.0e-3、9.5e-4、2.9e-3。仿真结果验证了所提控制器在外部载荷下轨迹跟踪的准确性和鲁棒性。
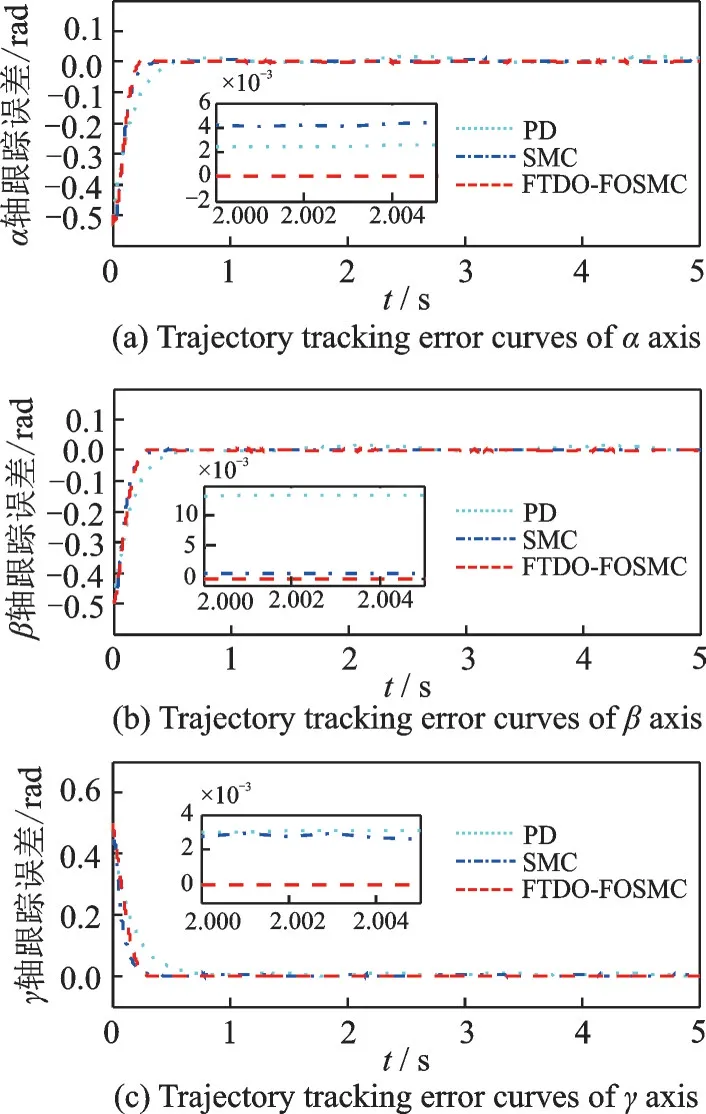
图9 轨迹跟踪误差响应(L=3, r=0.2)Fig.9 Response curves of tracking error (L=3, r=0.2)
更进一步,图11 为在所提控制器、PD 控制和传统SMC 下控制力矩输入量。显而易见,采用FTDO-FOSMC 控制时,系统在3 个方向上输入的控制力矩曲线均较为平滑,能够有效抑制抖振。而采用传统SMC 控制时,输出的控制力矩则存在较大程度的抖振现象。PD 控制的初始转矩为所提控制器的3 倍以上,抖振情况严重时,必然会对电机本体造成损害,同时会降低系统的轨迹跟踪精度,增大控制难度。较大的初始转矩将增大控制硬件负担。
3.3 实验

图10 3 种控制器下轨迹跟踪误差的均方根误差(r=0.2)Fig.10 RMSE of trajectory tracking error under three controllers (r=0.2)
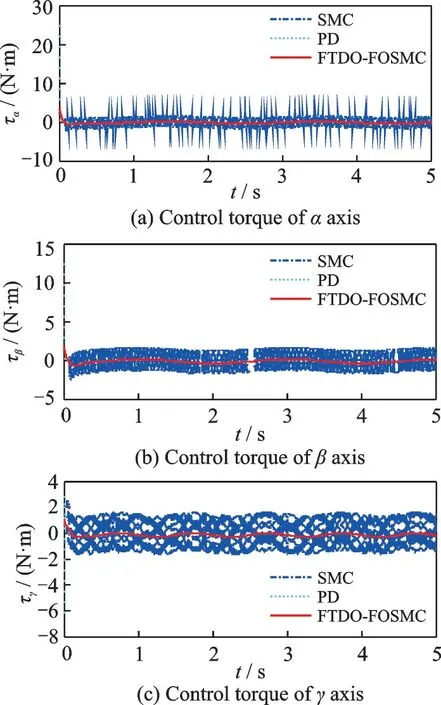
图11 控制力矩输入(L=3, r=0.2)Fig.11 Control torque input (L=3, r=0.2)
图12 显示的实验平台用于验证所提控制策略的有效性,其主要由永磁球形电机样机、上位机、位置检测装置和电流驱动装置组成。在实验中,为了易于观察控制性能,选择在XY平面中执行圆形轨迹,其轨迹为

实验中,将FTDO-FOSMC 控制与PD 控制相比较研究。图13(a,b)分别显示了PD 控制的轨迹跟踪和相应的跟踪误差。显然欧拉角α,β的轨迹跟踪误差最大值均大于1.1°,跟踪性能较差。图14(a)显示了FTDO-FOSMC 控制的轨迹跟踪性能,图14(b)显示了其轨迹跟踪误差,由图14 可知,实际轨迹较符合期望轨迹,并且欧拉角α、β的最大轨迹跟踪误差均小于0.63°。实验结果表明,所提控制器对复合干扰进行了有效的补偿,具有良好的鲁棒性和轨迹跟踪性能。

图12 实验平台Fig12 Experimental platform

图13 PD 控制下轨迹跟踪响应Fig.13 Trajectory tracking response under PD control

图14 FTDO-FOSMC 控制下轨迹跟踪响应Fig.14 Trajectory tracking response under FTDO-FOSMC control
4 结论
本文主要研究受复合干扰影响下的永磁球形电机轨迹跟踪控制。针对复合干扰,提出了一种基于有限时间干扰观测器的全阶滑模控制算法。有限时间干扰观测器对复合干扰进行了实时估计,全阶滑模控制算法使永磁球形电机的理想滑模运动具有完整的动态特性。仿真结果表明,在不同的复合干扰下,所提出的控制算法能够以较小的误差实现轨迹跟踪,具有良好的鲁棒性和抗干扰能力,并能够有效抑制控制输入的抖振现象。实验结果表明,使用所提控制算法稳态轨迹跟踪误差小于0.63°,比常规的PD 控制算法减少约50%。因此,所提控制算法能够实现永磁球形电机良好的跟踪性能,为永磁球形电机未来在工程中的应用奠定基础。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
防爆电机(2021年5期)2021-11-04
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16
