不同躯干前倾角度下太极拳马步动作下肢生物力学分析
2022-05-18 14:09王文昭张彦龙宋成龙胡龙威
当代体育科技 2022年9期
王文昭 张彦龙 宋成龙 胡龙威
(牡丹江师范学院 黑龙江牡丹江 157000)
目前,太极拳运动在全社会广泛开展。太极拳具有调节神经系统、改善心肌血液循环情况、维持关节和软组织的灵活性与柔韧性以及提升肌肉工作效能等卓著的健身功效。有研究认为,太极拳和专项核心训练同具有减缓中老年人神经肌肉功能退化的作用,能够缓解慢性非特异性腰痛(Non-specific Lower Back Pain,NLBP)[1]。但在太极拳运动中,练习者要始终保持屈膝的半蹲状态,此时膝关节周围的韧带松弛,影响膝关节的稳定性。此外,屈曲状态下膝关节受力更为复杂,极易产生疲劳,从而导致膝关节的损伤[2]。
作为太极拳桩功的一种,不同类型和流派的马步动作要求不尽相同。其基本规范为:两腿平行开立、下蹲后膝盖尽量不要超过脚尖、臀部不宜过度突出,形成“圆裆”的特点。太极拳是强调缓慢而持续的运动,包括由双侧到单侧的人体重心转换、膝关节的渐进性屈曲以及躯干和头颈的旋转等[3]。由于太极拳的动作具有较大的幅度变化和整体缓慢的特点,故练习者的肌肉需要在不断变化的张力和收缩角度下持续运动。而马步动作中,下肢处于屈髋屈膝的状态,为了维持稳定的下肢姿态和重心,股四头肌韧带和髌韧带会产生过高的张力,在大负荷下,细微损伤的反复累积会导致膝关节的慢性损伤[4]。而不正确的动作在不断的重复下,会影响太极拳练习者正确动作的习得。
通过运动学和动力学测量仪器以及肌电探测设备来分析太极拳马步中关节肌肉的运动特点,有助于更精确地分析不同马步动作对练习者下肢的力学影响。在传统马步动作要求中,躯干前倾是一个比较常见的不规范动作。较大的躯干前倾角度,对于练习者维持重心和姿势的稳定都提出了更高的要求,而这可能会导致关节更大的受力,而易引起损伤。
该文通过对比太极拳练习者在不同马步姿态(躯干前倾姿态和较为标准的马步姿态)中,下肢的运动学、动力学特征以及主要肌肉的肌电特征,为太极拳不同马步姿势的对比,提供科学的参考数据;对广大太极拳爱好者的练习,起到一定的指导作用;并重新审视传统观念中“错误”的马步,在生物力学层面上的优劣。
1 实验方法
1.1 时间及地点
2021 年10 月,牡丹江师范学院运动生物力学实验室。
1.2 受试者情况
该实验选取12 名受试者,均接触过太极拳运动且为男性的在校大学生,年龄在22~26岁之间;均无下肢重大疾病史,且实验前一周内未从事剧烈运动,并自愿参与实验。
1.3 实验仪器
该实验采用瑞典Qualisys动作捕捉系统,操作软件为Qualisys Track Manager(QTM),采样频率为100Hz;美国Delsys 无线表面肌电采集系统,采样频率为2000Hz。
1.4 实验过程
首先令12 名受试者分别在尽量维持躯干垂直于地面的姿态(Normal Trunk Pattern,NTP)下完成3 组有效的马步动作,采集信息并保存,然后让受试者尽可能进行躯干前倾模式(Anteverted Trunk Pattern,ATP)的马步动作。具体实验操作如下。
1.4.1 实验准备
实验人员提前入场,整理实验用具并调试仪器。令受试者均更换实验专用短裤,裸足。在对受试者身高、体重进行测量后,令其进行充分的热身并预先演练实验需要的动作。在受试者身上的指定位置粘贴反光Marker球,疲劳后在相应肌肉的肌腹隆起处粘贴、固定好肌电传感器。
1.4.2 数据采集过程
令12 名受试者依次走上测试位置,在动作捕捉、无线表面肌电采集装置的同步系统准备就绪后进行NTP 马步动作。再令受试者在系统准备就绪后进行ATP马步动作。
1.4.3 数据处理
将动作捕捉的配套软件QTM 中生成的同步采集信号导入Visual 3D软件中通过仿真计算提取出关节角度、关节力矩等运动学和动力学数据。其中获得的下肢肌电数据在MATLAB(2019a)中进行滤波、整流、标准化处理,分析并输出相应结果。
1.4.4 数据分析
该研究比较了两种马步下肢髋膝踝关节的角度差异、下肢髋膝踝关节的力矩差异以及下肢关键肌肉积分肌电值(Intergration EMG,iEMG)的差异。使用SPSS 23.0统计软件对每组待比对的数据进行配对t检验,观察其差异的显著水平,其结果用-x±s表示。
2 结果
2.1 两种不同马步下髋膝踝关节角度的对比分析
通过表1 可知,两种马步髋、膝、踝关节在屈伸方向上的最大角度均存在显著性差异(P<0.05);膝关节和踝关节在内收外展与内翻外翻方向上的最大角度之间存在显著性差异(P<0.05);而髋关节内收外展方向上与膝、踝关节内外旋方向上的最大角度之间没有显著性差异。
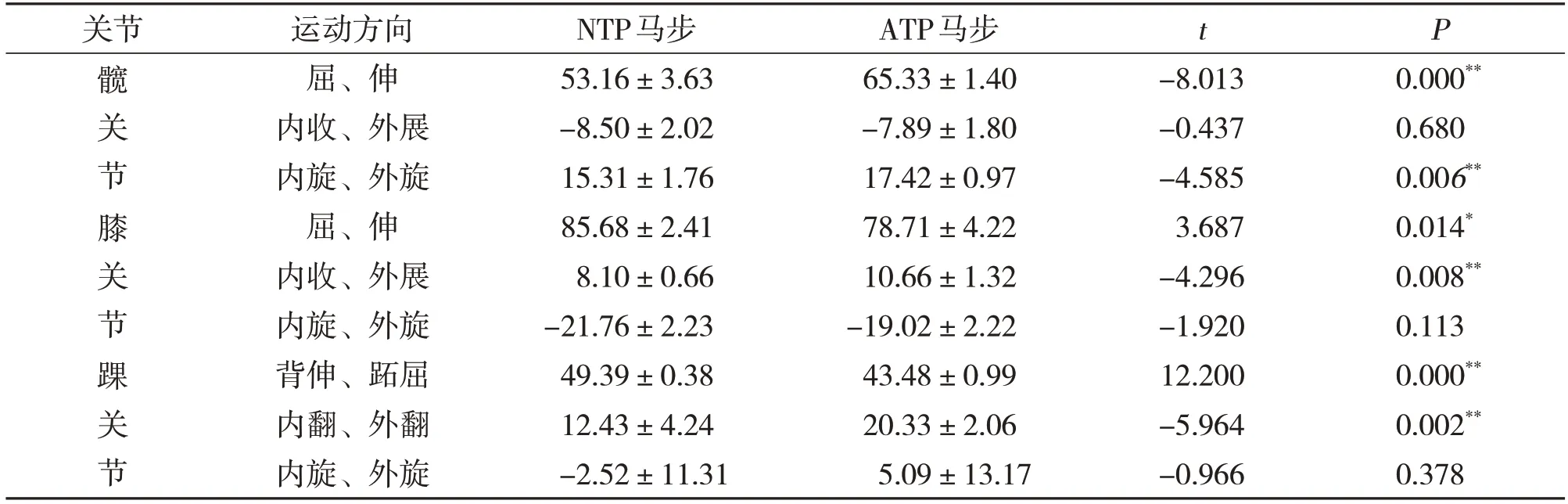
表1 两种不同马步下髋、膝、踝关节各方向最大角度对比(°)
2.2 两种不同马步下髋膝踝关节力矩的对比分析
通过表2 可知,两种马步下三个关节在所有方向的最大力矩之间均存在显著性差异(P<0.05),且除踝关节内外翻的力矩外,NTP 马步的所有最大力矩均显著大于ATP马步(P<0.05)。

表2 两种不同马步下髋、膝、踝关节各方向峰值力矩(N·m·Kg-1)对比
2.3 两种不同马步下下肢各主要肌肉积分肌电值的对比分析
由表3可知,除股直肌外,股二头肌、半腱肌、胫骨前肌在两种马步下肌电图的积分肌电值(Integrated EMG,iEMG)之间均存在显著差异(P<0.05),且NTP 马步组的iEMG 均小于ATP 马步组。而不存在显著性差异的股直肌,ATP 马步组的iEMG 也要大于NTP 马步组。

表3 两种不同马步下各肌肉iEMG(V·s)对比
3 分析与讨论
通过观察两种马步下关节角度的差异,可以发现,NTP马步下髋关节屈伸的最大范围要小于ATP马步,这体现出了躯干前倾角度为正误两种马步的本质区别。根据人体的运动规律,躯干在保持基本挺直的情况下前倾,骨盆会随之围绕冠状轴向前旋转,在下肢闭链的人体姿态下便会产生髋关节更大的屈曲幅度。NTP马步组的最大膝关节角度要显著小于ATP马步组的最大膝关节角度,即前者的膝关节运动幅度要明显大于后者。有研究发现,股髌间的接触面积会随膝关节屈曲角度的增加而增加,而增大的股髌接触面积有助于将施加在髌骨上的压力分散在更大的区域上,从而减少接触应力,以减轻股髌关节疼痛综合征(Patellofemoral pain syndrome,PFPS)患者在练习时的痛苦[5]。
在对于力矩的分析中,可见躯干正常的马步动作在各个关节上的力矩均普遍大于躯干前倾的马步动作。力矩是用来说明物体受到力后绕着转动轴转动趋势的动力学指标,故实验中的这一现象可能是由于NTP马步对人体重心稳定控制的要求较高。如NTP马步中踝关节在背伸跖屈方向上的力矩要显著大于ATP马步,这是因为在躯干处于中立位马步下蹲的过程中,为了保持稳定,人需要向前调整重心,此时胫前肌激活程度会随着躯干前屈角度的增加而增加[6]。也有研究者通过实验发现,在全脚掌着地的“亚洲蹲”中,胫骨前肌的激活程度显著高于需要人体重心前移的“西方蹲”动作[7]。iEMG代表了一段肌电信号下的面积总和,单位为V·s,是一段时间内肌电值输出的加和量,常被用以评价肌肉的活动程度[8]。该研究对目标肌肉的测量结果不同于前文对于胫前肌活动状态的预估,此研究中NTP 马步胫前肌的激活程度并未显著高于ATP 马步,而股二头肌和半腱肌这两块位于股骨后侧的肌肉显示了较强的活动度,根据Ohkoshi 等[9]的研究,躯干前屈姿态下的下蹲动作会有效刺激股后肌群的收缩,采取主动伸髋的策略来维持重心的稳定。
该研究中的马步动作,其关节下肢运动学、动力学和主要肌肉的激活模式与深蹲动作较为相似。在莫重阳[10]对深蹲的一项研究中,同样选择通过iEMG来分析肌肉的整体活动情况。在此研究中,iEMG随着深蹲负荷的大小变化明显,并且不同时相(不同肌肉工作模式)下同一肌肉的iEMG之间也存在显著性差异。相比之下,该研究存在着如下局限:在肌电分析过程中并未划分时相,这可能是某些肌肉的iEMG表现偏离预估的原因;未能准确控制变量,如在设计实验时,没有将受试者的马步动作规范在一定的关节角度范围内;选取指标单一,且未能将各指标结合起来进行分析。
3 结语
NTP 马步作为被广泛接受的“正确马步”姿势,对于下肢肌肉力量、协调以及人体维持重心稳定的能力等都有较高的要求,这些元素均可在NTP 马步中下肢的生物力学参数中得到体现。相比之下,ATP 马步因其躯干位置的不同,在各项生物力学指标上与NTP 马步之间存在多方面的差异,这或会为今后此类马步相关研究或太极拳爱好者提供理论指导。
猜你喜欢
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
发明与创新·大科技(2021年3期)2021-04-30
37°女人(2020年9期)2020-09-10
奥秘(2019年1期)2019-03-28
家庭医学(2017年8期)2017-09-06
中老年健康(2017年3期)2017-03-31
山东青年(2016年12期)2017-03-02
体育教学(2016年11期)2016-12-23
中学生数理化·八年级物理人教版(2014年2期)2014-04-02