
基于死区效应时间补偿的永磁同步电机矢量控制
2022-05-11 13:23:00陈国真黄旭东蒋炯炜
微特电机 2022年4期
陈国真,黄旭东,蒋炯炜
(中国电子科技集团公司第五十八研究所,无锡 214072)
0 引 言
永磁同步电机具有高功率密度、高效率、高可靠性等优点,在工业控制中得到了广泛的应用[1-2]。当采用三相电压型桥式逆变器驱动永磁同步电机时,为避免逆变器的上、下桥臂直通,需要加入一定的死区时间。死区时间和开关管与二极管压降、开关管的开通与关断时间所引起的逆变器非线性会导致相电流和电压谐波分量增大,波形发生畸变,进而造成电机运行精度的下降,此称为死区效应[3]。因此,许多学者针对死区效应的补偿展开了相关的研究。
文献[4]将扩展卡尔曼滤波器和基于神经网络的带通滤波器相结合,实现逆变器的死区补偿,但控制器的设计和实现相对复杂。文献[5-7]将由死区效应引起的电压误差作为扰动,并分别设计了内模控制器[5]、干扰观测器[6]、扩张状态观测器[7]进行死区补偿,但只是进行了仿真分析,并未进行相关的实验研究。文献[8]提出了基于电流修正的电压补偿方法,但只考虑了死区时间,并未考虑管压降和开关管的开通和关闭时间。文献[9-11]采用时间补偿法进行死区补偿,但文献[9]在计算电流矢量角时只考虑了电机正转的情况,文献[10,11]在计算等效死区时间时未考虑开关管和二极管的压降。
本文采用时间补偿法进行逆变器的死区补偿,在计算等效死区时间时综合考虑了死区时间、开关管和二极管压降、开关管的开通和关断时间。同时,通过电流矢量角判断相电流的极性,且电流矢量角的计算公式在电机正转和反转时同样适用。最后,实验验证了死区补偿方法的有效性。
1 死区效应及补偿
1.1 死区效应
在本文的电机控制嵌入式系统中,逆变器为三相电压型桥式逆变电路,如图1所示。在理想状态下,上桥臂和下桥臂的控制信号满足互补通断原则,即上桥臂开通时,下桥臂关断,反之亦然。而在实际应用中,开关管的通断需要一定的开通时间ton和关断时间toff。为避免上桥臂和下桥臂发生短路,在PWM控制信号中加入死区时间td,驱动信号如图2所示。此外,在开关管导通和二极管续流时,电机相电压会产生一定的压降(开关管压降Vs和二极管压降Vd),电机的电压波形如图3所示。
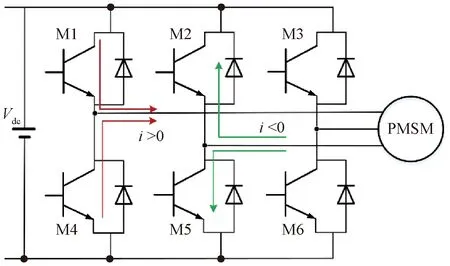
图1 三相桥式逆变电路
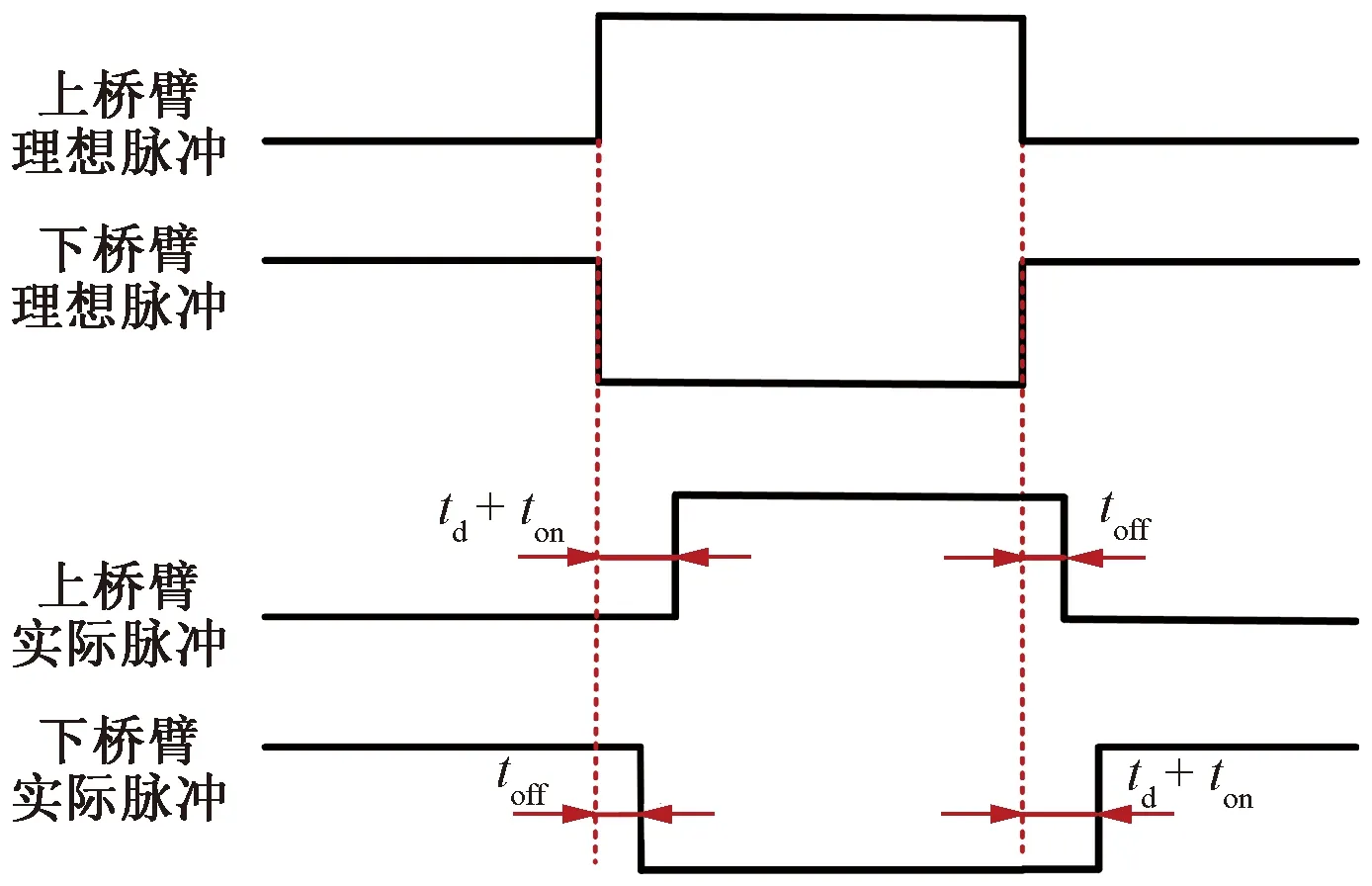
图2 逆变器驱动信号波形

图3 逆变器输出电压波形
综上所述,死区效应是由死区时间、开关管的开通时间和关断时间、开关管压降以及二极管压降所导致的。根据伏秒等效原理,在一个开关周期内,等效死区时间terr可表示[9]:
(1)
式中:Ts和Ts1分别代表PWM波的周期和上桥臂的实际导通时间。
1.2 矢量控制及SVPWM技术
本文的永磁同步电机闭环控制系统采用矢量控制策略,交轴电流id和直轴电流iq分别独立控制,设定id=0,使定子磁链保持恒定;只需通过改变iq的值即可实现对电磁转矩的控制。
逆变器的控制采用空间矢量脉宽调制(SVPWM)技术,通过基本电压空间矢量的线性组合,使电机内部的定子磁链为矢量圆,从而保证电机输出稳定的电磁转矩。
对应于上桥臂的开关状态(000,001,010,011,100,101,110,111),电机的基本电压空间矢量有8个:U000,U001,U010,U011,U100,U101,U110,U111,如图4所示。其中,U000和U111为零矢量。
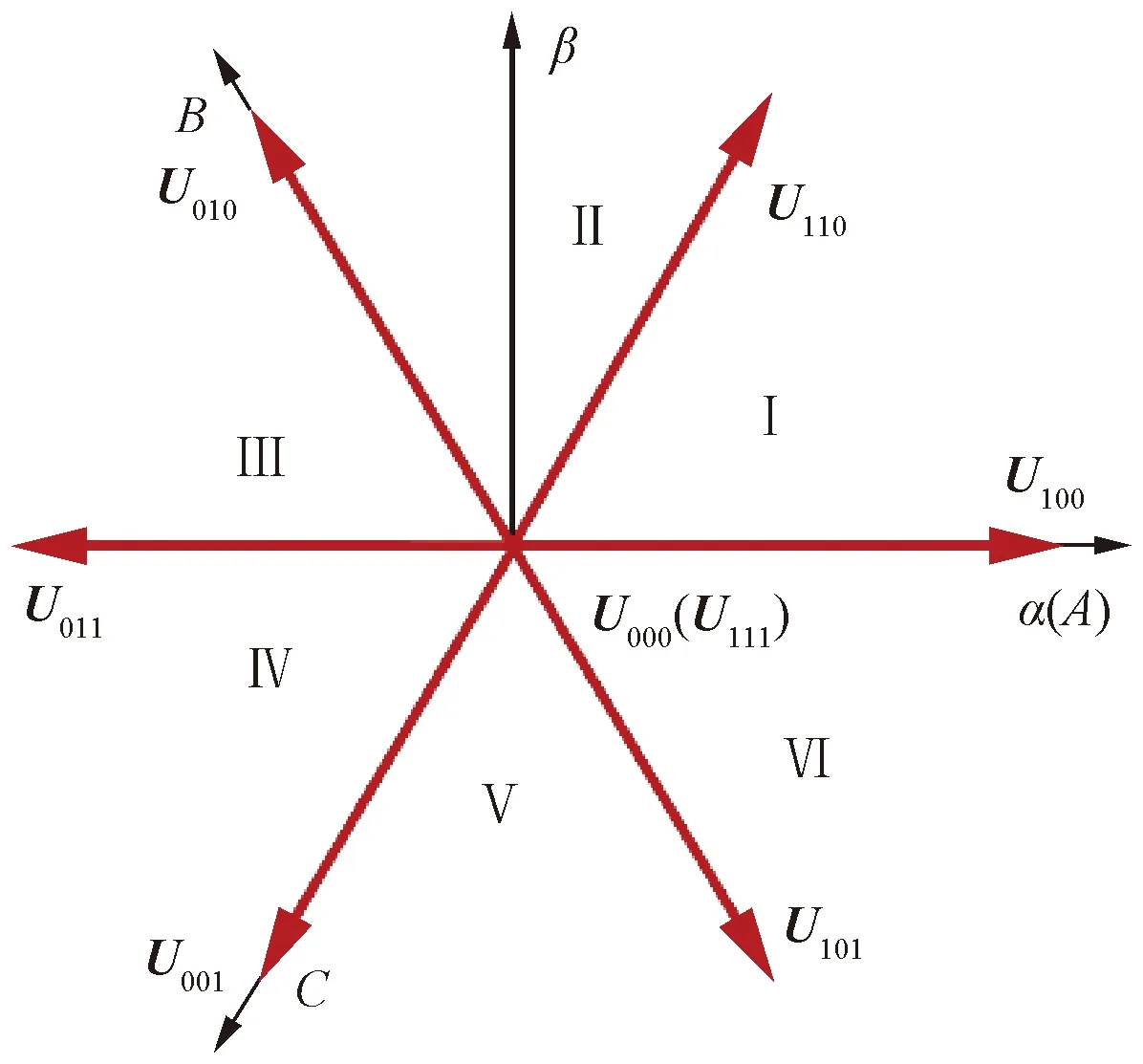
图4 基本电压空间矢量
以Ⅵ扇区为例,采用SVPWM时的上桥臂开关状态如图5所示[12]。
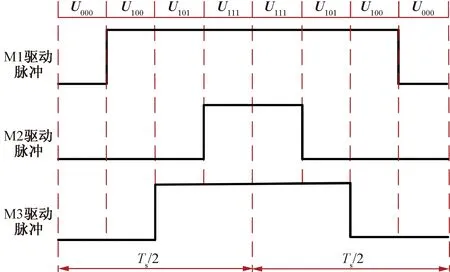
图5 SVPWM波形图
1.3 死区补偿
死区效应的补偿采用时间补偿法来实现,即根据三相电流的极性,将等效死区时间补偿到PWM波的高电平作用时间。根据前面分析可知,当i>0时,terr<0,上桥臂PWM波的高电平作用时间变小,为保证输出电压不变,需要将上桥臂PWM波的高电平作用时间增加|terr|,根据互补性,下桥臂相应的作用时间减少|terr|;当i<0时,terr>0,上桥臂PWM波的高电平作用时间变大,为保证输出电压不变,此时需要将上桥臂PWM波的高电平作用时间减少|terr|,下桥臂相应的作用时间增加|terr|。
在Ⅵ扇区,当A、B、C三相的电流分别为正、负、正时,经时间补偿后的SVPWM波形如图6(a)所示。根据相电流的极性,将每一相PWM波的上升沿提前或延后|terr|/2。U000和U111的作用时间减小了|terr|,U101的作用时间增大了2|terr|,U100的作用时间不变。U000和U111为零矢量,对最终的电压输出不产生影响。因此,在保证输出电压矢量不变的情况下,只需将M2的上升沿延后 |terr|,M1和M3的上升沿保持不变,简化的SVPWM波形如图6(b)所示。同理,可得到其他扇区的经时间补偿后的SVPWM波形图。
综上所述,时间补偿法根据三相电流的极性和等效死区时间,将上桥臂PWM波的上升沿提前或延后,来保证输出电压矢量达到期望值。

图6 时间补偿后的SVPWM波形
1.4 电流矢量角
由上文可知,在死区补偿时,需要准确判断三相电流的极性。然而,由于零电流钳位现象以及电流噪声等,直接测量三相电流的极性会产生较大的误差,影响死区补偿效果。
如图7所示,通过电流矢量角θ来判断电流的极性,θ∈[0,360°]。在闭环控制时,id=0,在电机转子转动角度的基础上增加或减少90°即可得到电流矢量角。需要注意的是,由于电流矢量角θ∈[0,360°],电机正转和反转时的角度处理方式是不同的。

(2)
式中:φ表示转子转动角度;rem(y,x)表示求y/x的余数。

图7 电流矢量角
通过电流矢量角判断电流极性,根据时间补偿法即可得到PWM波的上升沿触发时间,如表1所示。

表1 PWM波上升沿触发时间
2 仿真分析
本文通过Simulink软件对永磁同步电机的死区补偿算法进行仿真分析,仿真分析框图如图8所示。永磁同步电机为科尔摩根的AKM21 G型产品,母线电压为24 V。电机的线电阻和线电感分别为1.44 Ω和2.18 mH,转矩常数为0.1 N·m/(rms),极对数为3,电机的q轴电流的参考值为0.14 A。控制芯片采用TI的TMS320F28335,死区时间设为0.667 μs。逆变器选用三菱PSS20S92F6-AG型产品。逆变器的产品参数如表2所示。根据式(1),开关管和二极管的导通压降所导致的死区时间约为8 μs。电机的正转和反转结果一致,因此,本文以电机正转为例进行阐述。
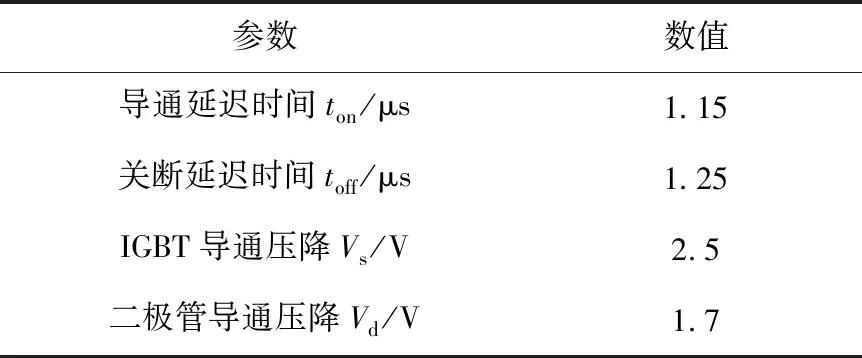
表2 逆变器参数
时间补偿模块嵌入在如图8的SVPWM模块中。根据表1,对开关管M1、M2和M3的驱动脉冲触发时间进行补偿。三个开关管的补偿方法完全一样,本文只显示M1管的驱动脉冲时间补偿的仿真框图,如图9所示。
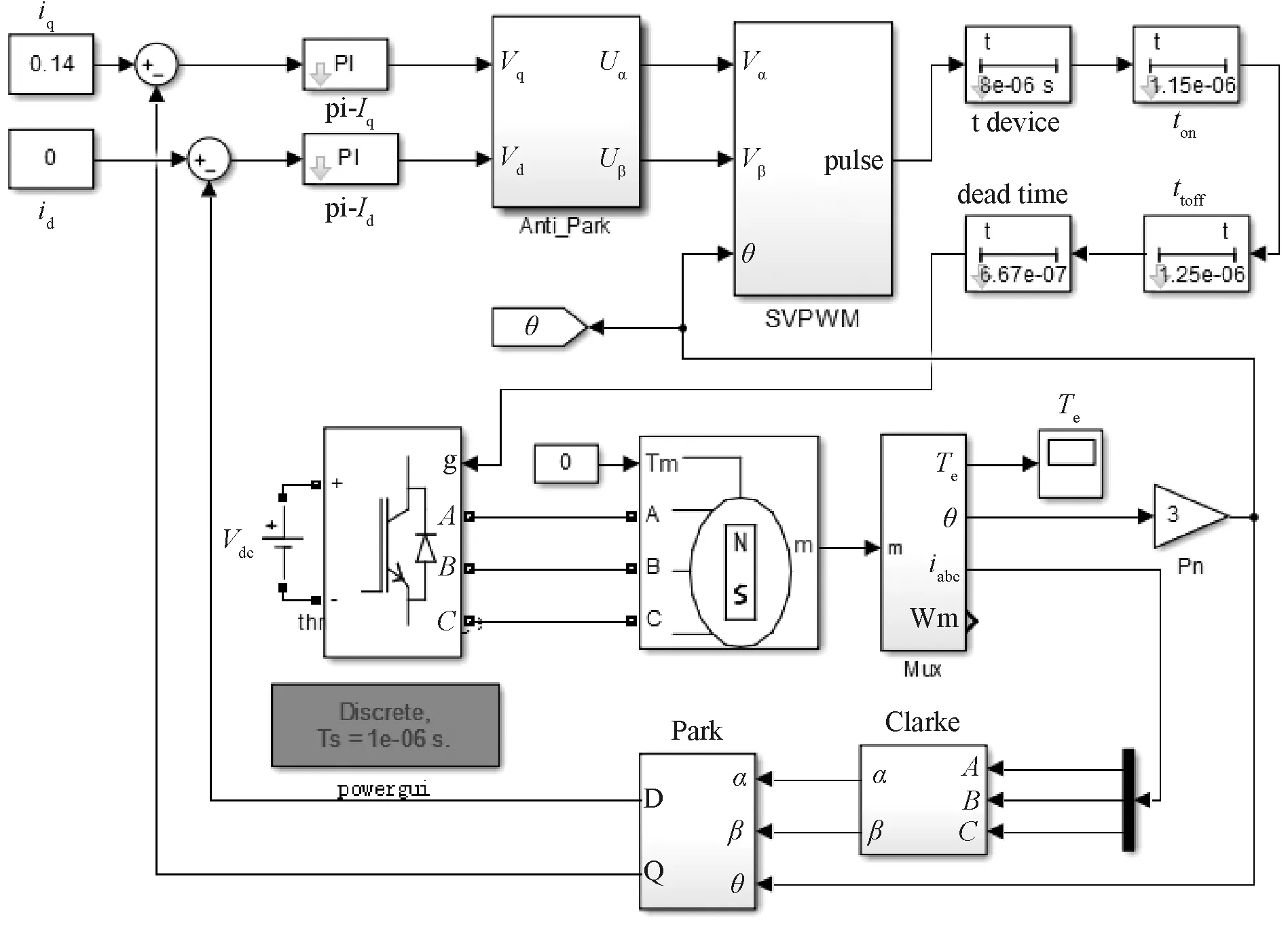
图8 死区补偿仿真框图

图9 M1驱动脉冲时间补偿仿真框图

图10 相电流仿真
当不采用死区补偿时,电机的相电流如图10(a)所示,经频谱分析可得,总谐波失真THD为10.16%;当采用时间补偿法进行死区补偿时,电机的相电流如图10(b)所示,THD为5.96%。仿真结果表明,采用时间补偿法进行死区补偿可以有效地减小相电流的谐波分量,从而提高电机运行精度。
3 实验验证
永磁同步电机的实验系统如图11所示。将表2参数代入式(1)即可得到等效死区时间terr。实验中,ton、toff、Vs、Vd的取值与实际值之间存在偏差,从而导致terr不够准确。以ton为例,根据逆变器的产品手册,其最小值为0.75 μs,典型值为1.15μs(实验取值),最大值为1.55 μs。加入调整系数k对补偿时间进行调整。k的取值通过相电流波形和d、q轴的反馈电流误差进行手动调整。 EMBED Equation DSMT4 根据实验效果,将k设置为0.2。

图11 电机调试实验系统
实验中,d轴电流的参考值设为0,q轴电流的参考值设为0.14 A(标幺值为0.07)。根据实验,未补偿时电机的相电流如图12(a)所示,d轴和q轴的反馈电流如图13(a)和图14(a)所示,d轴电流的波动范围为-0.019~+0.019,q轴电流的波动范围为0.059~0.078;经过死区补偿,电机的相电流如图12(b)所示,d轴和q轴的反馈电流如图13(b)和图14(b)所示,d轴电流的波动范围为-0.013~+0.009,q轴电流的波动范围为0.063~0.078。根据实验结果,经过死区补偿后,电机的相电流波形畸变明显改善,且d轴和q轴的反馈电流误差明显减小,验证了死区补偿方法的有效性。

图12 相电流实验

图13 d轴电流

图14 q轴电流
4 结 语
本文采用时间补偿法来解决由于逆变器的死区效应造成的相电流波形畸变问题。在进行死区补偿时,综合考虑了死区时间、开关管和二极管压降、开关管的开通和关断时间,并通过电流矢量角得到三相电流的极性。通过仿真分析和实验,验证了时间补偿算法的有效性。
猜你喜欢
数理天地(高中版)(2024年12期)2024-06-25 15:37:29
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
工程数学学报(2020年6期)2021-01-09 02:44:40
通信电源技术(2018年3期)2018-06-26 08:05:42
池州学院学报(2017年3期)2017-10-16 01:38:36
电气化铁道(2017年1期)2017-04-16 06:00:17
航空兵器(2016年5期)2016-12-10 17:14:13
青春岁月(2016年8期)2016-05-14 08:25:30
