水下运载器系统快速开盖运动学研究
2022-04-26 09:09:32产斯志
数字海洋与水下攻防 2022年2期
袁 瑞,产斯志
(中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
近年来,各国围绕着海洋权益和海洋资源的竞争愈发激烈,海洋战略在中国的总体战略中起着越来越重要的作用,未来海上作战已不再是武器对武器、平台对平台的对抗,而是转变为体系之间的对抗[1-3];中国也将从原来的依赖陆上资源和陆上力量的战略逐渐转变为依赖海洋资源和海上力量的国家战略[4]。其中水雷、深弹作为最具海军特色的作战武器,至今已有100多年发展历史[5],其不断研制和开发对于我国加强海洋武备、提高海洋话语权等方面具有重要意义。
水下运载器是一种将无人机、各类导弹、鱼雷等作战装备适配安装于水下,可通过远程手段控制,执行侦察打击等任务的新型水下武器装备[6-7]。根据其使命,通常内部装载不同载荷,其中上浮开盖过程是其作战流程中非常关键的一个动作过程,如何在复杂多变的环境载荷作用下实现其顺利开盖至关重要。水下运载器是具有高度非线性、快时变性和强耦合的系统[8],在其工作过程中受到波浪力、火箭推力、重力、流体阻力等外界因素的影响;而开盖动作又使得水下运载器系统构件之间产生相对运动,环境载荷与环境载荷、刚体运动之间存在相互耦合,是一个多刚体动力学问题,其运动特性较为复杂。本文针对水下运载器系统开盖动作,利用多刚体Kane方法建立了系统的动力学方程,分析了不同设计参数及运载器初始姿态对开盖过程的影响,为水下运载器结构设计提供了参考。
1 数学模型和数值计算方法
1.1 水下运载器快速开盖过程受力分析
本文中水下运载器系统的计算模型主要包括运载器壳体和头盖2个部分。运载器通常系泊在海底待命,接受到指令后开始上浮,在运载器头盖完全出水瞬间,控制系统发出指令引爆推冲机构内的火药,爆炸瞬间产生的大量高压气体推动推冲机构活塞做功,进而对头盖的一端施加一个瞬时冲击力,使得头盖绕其另一端铰点进行定轴转动,实现其快速开盖动作。
水下运载器以一定初始速度冲出水面,其出水过程受到负加速度的力,主要包括被扰动流体的附加质量变化引起的力、稳态扰流产生的力、重力、浮力及表面摩擦力[8]。当水下运载器头盖完全出水瞬间执行点火开盖动作,此时头盖处于空气介质中,浮力和附加质量变为0,忽略气动力对头盖的影响,考虑运载器壳体水下部分受到流体阻力及惯性力影响;推冲器对头盖施加瞬时冲击力,使其产生一个相对运载器壳体的定轴转动,同时运载器壳体受到推冲器反作用力的影响。推冲器作用时间较短,本文在计算中假定其作用行程内产生的推力恒定。
1.2 水下运载器系统动力学建模
为了模拟水下运载器的动态开盖过程,需要建立其动力学方程,本文采用混合坐标系法来描述其运动关系,建立整个系统的坐标系如图1所示。其中O0-XYZ为大地坐标系,其原点位于水线面处;Op-XYZ为运载器随体坐标系,跟随运载器一起转动,其原点位于运载器质心;Ot-XYZ为头盖平移坐标系,其原点位于头盖与运载器壳体的铰接点处。

图1 水下运载器系统坐标系建立Fig.1 Coordinate system establishment of underwater vehicle
将运载器和头盖考虑为刚性体,其中运载器考虑其3个自由度的平面运动,即沿O0Z方向的平动和绕O0Y轴的转动,头盖考虑其绕O0Y轴的转动,根据多刚体系统 Kane方法[9]可推导得到系统的动力学方程:

式中:f表示运载器系统独立广义坐标的数量,本文模型中f=4;表示运载器壳体的第r个广义主动力;表示运载器壳体的第r个广义惯性力;表示头盖的第r个广义主动力;表示头盖的第r个广义惯性力;表示水下运载器主动内力矩(元)的第r个广义主动力。
式(1)中,运载器壳体和头盖的广义力形式相同,给出壳体部分的广义力表达式如下:
式中:Fp、Mp表示壳体受到的外力对选定动力学参考点的主矢、主矩,通常包含水动力、浮力、重力、等;表示运载体壳体惯性力对参考点的主失、主矩;为运载器壳体参考点处的第r偏速度、第r偏角速度[10];对于刚体而言,通常将动力学参考点定在刚体质心处可简化运算。

式中:Fk、Mk表示水下运载体壳体主动内力对选定动力学参考点的主矢、主矩;为第k个铰的相对(角)速度的第r偏(角)速度;若系统构件之间不存在相对运动或者不存在主动内力(矩),则为0。
1.3 动力学方程求解
通过式(1)推导可以得到水下运载器系统的动力学方程组,利用MATLAB软件进行求解,其迭代求解程序框图如图2所示。
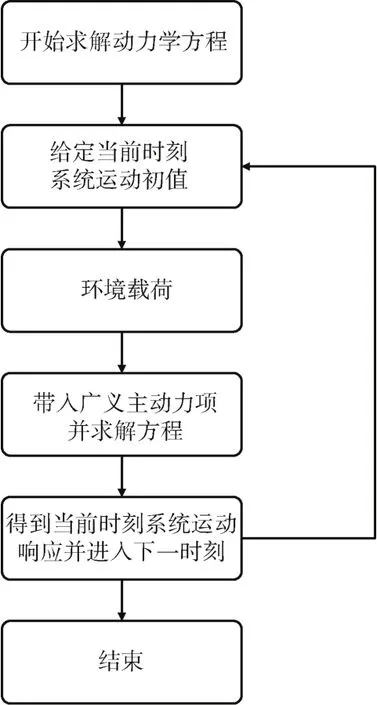
图2 动力学方程求解计算程序框图Fig.2 Block diagram of computational program for dynamic equation solving
2 水下运载器系统开盖特性分析
水下运载器上浮开盖过程对后续武器进行目标打击至关重要,其中武器发射的时机受到运载器的姿态和开盖时序的影响。运载器出水后浮心下移且浮力减小,回复力矩相对于在水中明显减小,此时受到开盖过程外力干扰后存在倾斜的风险。本节分析了开盖动作过程对运载器壳体姿态的影响,计算了不同参数下的开盖时间,为武器发射时序控制提供参考。计算工况如表1所示。
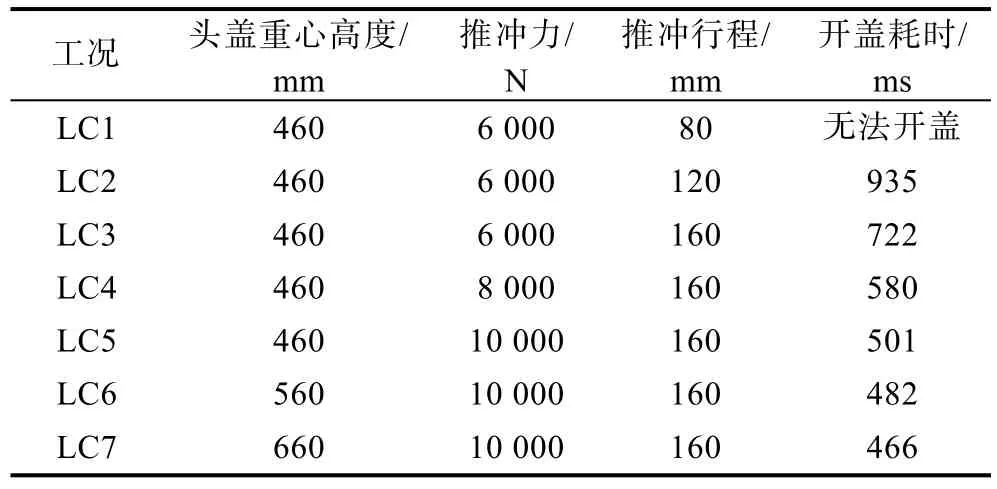
表1 计算工况Table 1 Calculating cases
图 3以LC5工况为例,给出了开盖过程中运载器壳体的运动响应。
结果表明:开盖过程中水下运载器横向位移较小,为毫米量级;运载器壳体受到推冲器反作用力的影响产生了与头盖翻转方向
相反的转动,在开盖成功时刻运载器壳体转动角度约为 0.22°,综合表明开盖过程对运载器壳体的影响较小。
图 4给出了LC5工况下头盖转动角和转动角速度的时间历程曲线,其数值为相对于运载器随体坐标系Op-XYZ的结果。可以看出:推冲器工作时的瞬时冲击力使得头盖在短时间内产生非常大的运动加速度,在86 ms推冲器作用行程结束,头盖转动角速度达到约 120(°)/s,随即头盖在惯性作用下继续翻转;当翻转角度约为49°时,头盖重心位置达到最高,此时转动角速度曲线到达拐点,头盖在重力作用下加速翻转直至开盖完成。
结合表1可以得出:推冲器作用下头盖翻转角速度趋于线性增长;推冲器作用结束后,头盖靠惯性翻转过程中动能与势能相互转化,角速度最小值为 187(°)/s,开盖完成时角速度为 204(°)/s。增大推冲器作用行程,或增大装药量(即提高推冲力)均能有效提高翻转过程角速度,进而缩短开盖过程耗时。此外,提高头盖重心高度能减少开盖过程动能向势能转化,变向提高了惯性翻转过程的平均角速度,可以在设计阶段通过优化头盖重量分布达到缩短开盖耗时的效果。
3 开盖过程影响因素分析
在实际中,运载器上浮过程受到波浪力和洋流等诸多外界干扰,运动特性复杂,开盖瞬间运载器姿态很难保持理想状态(即垂直于水平面出水)。当运载器偏转角度过大时,会对开盖过程造成不利影响,也会加大后续动作过程的控制难度,如图5。本小节针对水下运载器开盖瞬间处于不同倾角时的情况进行分析,给定运载器容许倾斜角为20°,研究了容许倾斜角范围内开盖动作的执行情况。
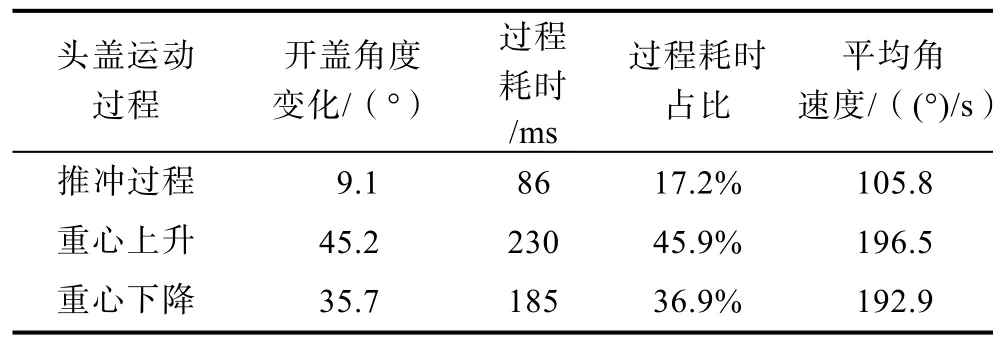
表2 LC5工况计算结果Table 2 Results of LC5

图5 初始倾斜角对开盖过程影响Fig.5 Effect of initial inclination angle on lid opening process
计算结果表明,运载器初始倾斜角与头盖转动方向一致时,能较为明显缩短开盖时间;开盖时间相对初始倾斜角近似呈抛物线型增长,初始倾斜角每增加10°,开盖时间增加约为10%左右,且增长趋势越来越快,初始倾斜角 20°相对–20°时开盖时间增加约为 71%;从图 5(b)中可以得出,初始倾斜角主要影响头盖角速度达到拐点的快慢,而对推冲器作用效果的影响较小,推冲器行程内头盖能达到的最大角速度几乎相同。
4 结束语
本文以水下运载器系统为研究对象,利用多刚体Kane方法建立了系统的动力学方程,计算了不同工况下水下运载器系统上浮开盖过程的运动响应,分析了影响开盖动作的因素,为运载器系统结构设计提供了一定的参考。研究表明:
1)增大推冲力或者增加推冲器作用行程都能明显缩短开盖时间,开盖动作对运载器壳体的运动影响较小,可以忽略;
2)头盖重心位置越高,头盖翻转过程达到角速度拐点的时间会越短,对开盖越有利,在结构设计中应合理分配布局,尽量使头盖重心靠近顶端;
3)运载器初始倾斜角与头盖转动方向一致时,能较为明显缩短开盖时间;初始倾斜角主要影响头盖角速度达到拐点的快慢,而对推冲器作用效果的影响较小。
猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
河北理科教学研究(2020年2期)2020-09-11 06:15:56
电子测试(2018年14期)2018-09-26 06:04:14
北京航空航天大学学报(2017年1期)2017-11-24 05:22:11
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
物理实验(2015年10期)2015-02-28 17:36:56
地震研究(2014年1期)2014-02-27 09:29:47
数学教学通讯·初中版(2013年6期)2013-04-29 00:44:03