水下航行体触网关联体运动建模与仿真分析
2022-04-26 09:09:32戴文留廖欢欢彭双志颜学坚
数字海洋与水下攻防 2022年2期
戴文留,彭 顺,廖欢欢,*,彭双志,颜学坚
(1.江南工业集团有限公司,湖南 湘潭 411207;2.中国兵器水中兵器研究院,湖南 长沙 410006)
0 引言
目前各国水面舰艇的空中防御体系比较完善、有效[1],而水面和水下防御体系,特别是对水下航行体的防御,则相对薄弱。尽管反水下航行体武器近年来有了快速改进,但尾流自导水下航行体的出现,使得水面舰艇现有的防御变得困难[2]。水下航行体的威胁已经成为影响海上交通、军事和商业船只生存能力的主要因素,因此必须加紧开展反尾流自导水下航行体的相关弹药技术研究,以提高水面舰艇的防御和生存能力。根据尾流自导水下航行体的攻击特性[3],在舰艇尾流后方布撒拦截网是直接、有效的“面拦截,面摧毁”对抗手段之一,可有效保护水面舰艇[4]。
为研究水下航行体触网关联体的运动特性,本文基于 SimMechanics建立水下航行体触网关联体仿真运动模型[5],分析了水下航行体在不同触网位置下关联体的运动状态变化规律,对拦截网设计具有一定的参考意义。
1 水下航行体触网问题描述
水下航行体触网关联体运动模型的工作环境处于海水之中。2个浮筒通过网体将2个配重悬浮于海水中,浮筒与配重之间的拉力将网体竖直展开,而网体水平方向基本不受力的影响,随海浪运动[6]。当航行体以一定的航行速度垂直碰触到网体时,网体将牵连浮筒和配重做关联运动,如图1所示。

图1 水下航行体触网运动示意图Fig.1 Schematic diagram of an underwater vehicle touching net
2 建立仿真模型
2.1 仿真假设
由于水下航行体触网后与浮筒和配重之间的交联运动关系十分复杂,为便于仿真计算,作如下假设:
1)将水下航行体、浮筒和配重等效为相当体积、重量的球体,不考虑刚体旋转对水下运动的影响;
2)水下航行体推力方向始终保持初始触网速度方向,一旦触网,水下航行体将与触网区域网体锁死,无滑动、脱落现象;
3)网体按受力特性简化为4根柔性线体,无延伸,水流对其影响忽略不计。
水下航行体触网关联体运动简化结构示意如图2所示。

图2 水下航行体触网关联体运动简化结构图Fig.2 Simplified structure diagram of associated body motion of an underwater vehicle touching net
2.2 仿真模型
按照上述假设条件,水下航行体触网关联体可简化为仅具有水下负浮力Ff、运动阻力Fd、水下航行体推力P和柔性线体拉力Fli的简化刚体系运动,各关联体动力学方程如下所示[7]。
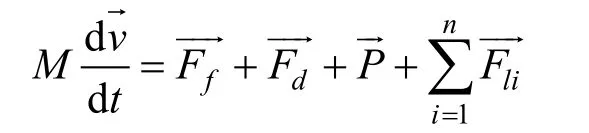
式中:M为关联体(水下航行体、浮筒、配重)质量;v为关联体(水下航行体、浮筒、配重)速度。
采用 Simmechanics程序建立水下航行体触网关联体运动模型如图3所示[8-13]。该机构是由刚体机构(航行体、浮筒1、浮筒2、配重1、配重2)、柔性线体机构(Line1、Line2、Line3、Line4)通过万向铰联接而成。其中,刚体机构航行体为原动件,通过柔性线体机构将力传递给各浮筒和配重,在浮筒1初始位置建立地面坐标系O_XYZ,浮筒、配重与网体在XOZ平面内完全展开,Y轴为水下航行体初始运动方向。

图3 水下航行体触网关联体运动仿真程序Fig.3 A simulation program for motion simulation of associated bodies of an underwater vehicle touching net
柔性线体机构由众多连杆模块通过万向铰联接起来近似模拟,如图4所示。

图4 柔性线体机构程序Fig.4 Mechanism program of flexible wire body
在模型中,设置各关联体(水下航行体、浮筒、配重)在水下运动过程中的负浮力及水下运动阻力情况如下所示。
1)负浮力。

式中:ρ为海水密度;V为关联体(水下航行体、浮筒、配重)体积;M为关联体(水下航行体、浮筒、配重)质量;g为重力加速度。
2)阻力。
阻力Fd始终与速度方向相反。

式中:v为关联体(水下航行体、浮筒、配重)速度,其中vx、vy、vz为速度v在地面坐标系上的分量;S为关联体(水下航行体、浮筒、配重)参考截面积;Cd为关联体(水下航行体、浮筒、配重)水中阻力系数。
2.3 仿真参数设置
关联体初始位置及水下航行体、浮筒、配重各自初始参数如表1所示。选取3个水下航行体触网位置进行仿真计算,比较分析关联体之间运动关系及水下航行体、配重速度/加速度大小。

表1 初始参数Table 1 Initial parameters
3 仿真结果及分析
水下航行体在位置 1触网时,仿真结果如图5–7所示。水下航行体在位置1触网后,浮筒1与浮筒 2的间距逐渐缩短;水下航行体速度逐渐下降,在3 s后趋于稳定,约为5 m/s,y轴加速度先增大后减小,峰值约为25 m/s2;配重1与配重2速度随时间变化,先迅速增大,而后逐渐下降,前者峰值速度为19 m/s,后者约为14 m/s,配重2速度在下降过程中逐渐趋于稳定;配重1与配重2均拥有较大短暂起始加速度,最高约370 m/s2。
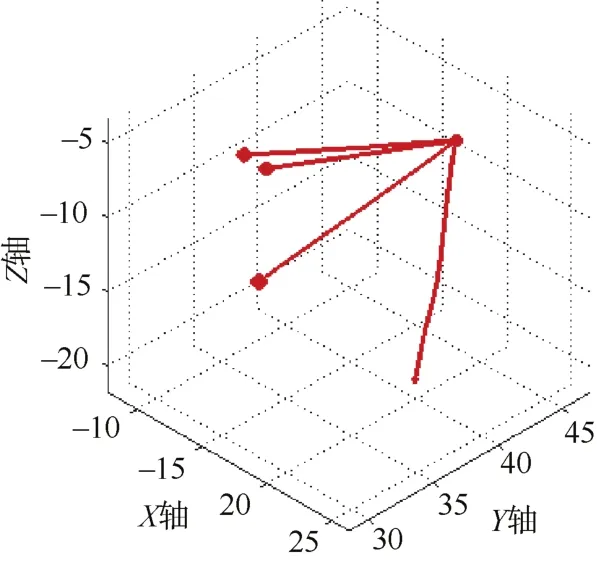
图5 水下航行体触网空间运动曲线Fig.5 Space motion curve of an underwater vehicle touching net

图6 水下航行体速度、加速度随时间变化曲线Fig.6 Variation curve of speed and acceleration of an underwater vehicle with time
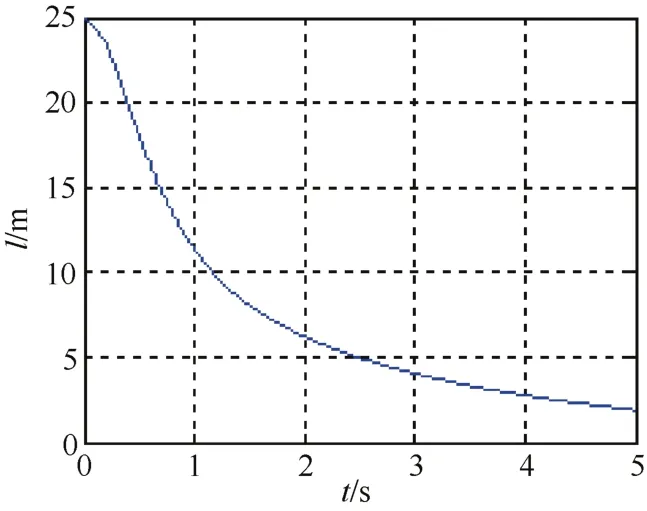
图7 浮筒间距随时间变化曲线Fig.7 Variation curve of float distance with time
水下航行体在位置 2触网时,仿真结果如图8–10所示。水下航行体在位置 2触网后,浮筒 1与浮筒2的间距逐渐缩短;水下航行体速度逐渐下降,并稳定在约5 m/s,Y轴加速度先增大后减小,峰值约为21 m/s2;配重1与配重2速度随时间变化,先迅速增大,而后逐渐下降,前者峰值速度为20 m/s,后者约为10 m/s,配重2速度在下降过程中逐渐趋于稳定;配重1与配重2均拥有较大短暂起始加速度,最高约500 m/s2。
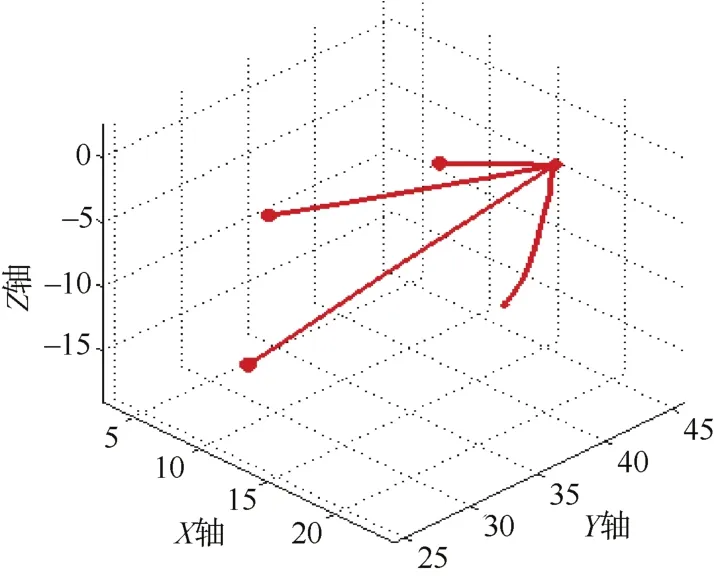
图8 水下航行体触网空间运动位移曲线Fig.8 Space motion curve of underwater vehicle touching net

图9 水下航行体速度、加速度随时间变化曲线Fig.9 Speed and acceleration of underwater vehicle changing with time

图10 浮筒间距随时间变化曲线Fig.10 Variation curve of float distance with time
水下航行体在位置 3触网时,仿真结果如图11–13所示。水下航行体在位置3触网后,浮筒1与浮筒2的间距逐渐缩短;水下航行体速度逐渐下降,在3 s后趋于稳定,约为5 m/s,Y轴加速度先增大后减小,峰值约为30 m/s2;配重1与配重2速度随时间变化,先迅速增大,而后逐渐下降,前者峰值速度为15 m/s,后者约为18 m/s,配重2速度在下降过程中逐渐趋于稳定;配重1与配重2均拥有较大短暂起始加速度,最高约500 m/s2。

图11 水下航行体触网空间运动曲线Fig.11 Space motion curve of an underwater vehicle touching net

图12 水下航行体速度、加速度随时间变化曲线Fig.12 Variation curve of speed and acceleration of an underwater vehicle with time
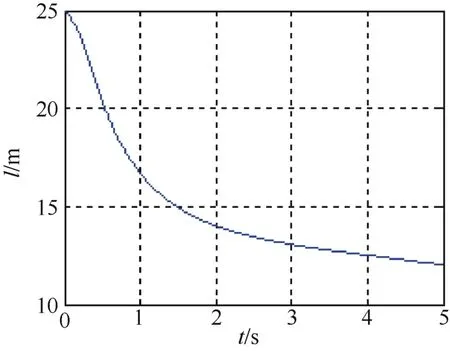
图13 浮筒间距随时间变化曲线Fig.13 Variation curve of float distance with time
仿真分析如下。
1)水下航行体水平运动触网后,速度逐渐降低,最终趋于稳定,稳定速度的大小与触网位置和关联体质量基本无关。水下航行体最终稳定速度应在水下航行体推力与关联体水中阻力之和相等时出现,所以,要想减小水下航行体的最终速度,应增大关联体参考截面积和水中阻力系数。
2)配重的速度随时间变化关系为先迅速增大,后逐渐降低。与配重1相比,配重2的速度更加稳定,且配重2的速度与加速度振荡频率明显高于配重1。分析其原因是:配重1与配重2相比具有更小的水中阻力系数,在获得某一速度后,更易于保持速度,因此,配重1在运动过程中受水下航行体拖动的频率低于配重2,所以其速度与加速度振荡频率较低。
3)根据仿真结果可知,水下航行体触网后,向关联体重的一边转弯运动。这里假设水下航行体推力方向为地面坐标系OY轴,而不是雷体轴线方向,所以仿真结果并不能完全代表关联体真实运动过程,将在后续研究中改进。
4 结束语
本文通过建立水下航行体触网关联体仿真运动模型,得到了水下航行体在不同触网位置下关联体的运动状态变化规律。结果表明:1)水下航行体触网后,速度逐渐降低,最终趋于稳定,稳定速度的大小与触网位置和关联体质量基本无关;2)配重的速度随时间变化关系为先迅速增大,后逐渐降低。仿真结果对舰艇反水下航行体拦截网设计研究具有一定的参考意义。
猜你喜欢
中国海洋平台(2022年5期)2022-11-01 09:54:50
房地产导刊(2022年4期)2022-04-19 09:04:22
锻造与冲压(2020年8期)2020-04-20 06:23:24
能源(2018年10期)2018-12-08 08:02:30
中国航海(2018年1期)2018-05-07 11:12:23
世界海运(2017年10期)2017-10-19 05:57:44
传媒评论(2017年3期)2017-06-13 09:18:10
垂钓(2016年9期)2016-10-31 06:40:00
中国老区建设(2016年10期)2016-02-28 09:34:27
大坝与安全(2016年5期)2016-02-10 01:02:51