一种快速自适应船载水声定位系统设计
2022-04-26 09:09:44祝侃
数字海洋与水下攻防 2022年2期
祝 侃
(中国船舶集团有限公司第七一○研究所,湖北 宜昌 443003)
0 引言
随着海洋科学技术的发展,水声定位系统的作用越来越广泛。在海洋勘探、水下目标探测以及水下设备标定等科考活动中,通常会遇到对水下目标进行精确定位的问题,利用水声技术对水下目标进行定位是解决该问题的一项关键技术[1]。水声定位系统是利用水下声波定位的系统,可以实现高精度、连续自动、准实时地标识水下目标位置[2],是利用沿不同距离路径传播的水下声脉冲间的时间差或相位差,对水面、水中目标定位的仪器系统[3]。在民用上,可用于水下目标跟踪、定位、海上石油勘探、海底管道铺设定位及维修等[4];在军事上,可以实现各种水下潜艇、无人潜航器和监测节点的精确定位,研究意义重大。
1 系统组成
水声定位系统按照定位基线的尺度一般可分为长基线、短基线和超短基线3种类型。

表1 水声定位系统分类Table 1 Classification of hydroacoustic positioning systems
长基线水声定位系统一般需要提前布署在预定海域,多采用海底固定节点的方式,也可采用水声浮标的方式,各节点距离几百至几千米,通过海底电缆或水面高速无线通讯实现各节点数据的汇总分析和计算。长基线系统一般需要采用合作信标的模式完成目标定位,被测的水下目标需要搭载对应的合作声信标,通过测量各基线节点和被测目标搭载信标之间的距离,采用球面几何交汇的方法进行目标定位,一般至少需要3个节点的数据才可以实现精确的目标导航与定位,实际应用中,可以布设多个基元,产生冗余观测数据,提高测量精度[5]。
短基线水声定位系统一般安装在船舶或大型试验平台上,多采用共型安装,或设计专用的船载安装结构系统,采用三元或四元构建声基阵,各节点距离几米至几十米。各基元之间的相互关系需要提前进行精确的测定,组成声基阵坐标系,为方便使用,一般还需要测量和计算出与船体坐标系的关系。短基线系统有同步信标和应答信标测量2种方式,多采用同步信标进行水下定位。同步信标模式下,首先测得各基元接收到目标信号相对于同步信号的时延,然后计算各自的声程,再利用球面交汇算法得到目标相对基阵的几何位置关系。
超短基线水声定位系统使用较为灵活,可临时安装在船体任意位置,特别适用于水下目标长时间跟踪定位。其所有声基元集中安装在一个阵面结构中,声基阵坐标系与船的坐标系之间的关系要在安装时精确测定,包括位置(X、Y、Z偏差)和姿态(声基阵的安装偏差角度:横滚、俯仰、方位角)。使用时需要在被测目标上安装与超短基线配套的合作声信标,系统一般通过测定各声基元接收到目标信号的相位差,得到各基元与目标的声程差,计算得到各基元与目标距离,再用声速剖面的数据修正声程值,最后解算出其几何位置。

图1 短基线定位系统组成示意图Fig.1 Schematic diagram of short baseline underwater acoustic positioning system

图2 短基线定位系统实物样机Fig.2 Physical prototype of short baseline underwater acoustic positioning system
传统的短基线水声定位系统在船载使用时,需要提前对阵形进行现场测量,如果系统更换到新的测量平台中又需要重新进行,使用较为不便,极大影响了其应用和定位效果。本文完成了一种快速自适应的船载短基线水声定位系统,可以自动适应测量平台,快速完成阵型的自测定,同时结合高精度卫星罗经和精准的同步声信号时延解算,最终实现静止或低速水下目标的高精度水声定位功能。
项目组依托某试验场船载测量系统建设项目,完成了本定位系统的软硬件设计,并开展了湖上演示试验测试,500 m范围内定位精度优于1 m,2 km范围内定位精度优于2 m。实验表明:本系统可以在各种船载平台上进行声基阵的快速自适应测量,并完成高精度的水下目标定位功能。
自适应短基线定位系统主要由水声信号处理单元、收发合制声基元、便携式计算机、水声定位软件、同步声信标、卫星罗经等组成,所有的基元均采用柔性电缆放置到水下,且换能器下方缀有重物,以保证其位置的稳定性[6],系统工作流程如图3所示。

图3 短基线定位系统工作流程Fig.3 Working process of short baseline underwater acoustic positioning system
2 快速自适应阵型计算
考虑到本定位系统需要在多个试验场的各种试验船上移动使用,每次 4个基元的阵型均不相同,人为测量不仅繁锁,而且由于船体形状遮挡,很难测量准确。另外,自动测距过程中,存在多途干扰、尖刺噪声等各种情况,为此,本系统采用一种基于 LFM 回波测距的快速自适应的阵型计算方法。

图4 声基元阵型示意图Fig.4 Schematic diagram of acoustic element array
试验前将4个基元按不同船型的特点,以大致四方形的阵型分层布设入水,间距控制在10~50 m之间,入水深度一般为固定的10 m或15 m。将收发一体的4个声基元接入水声信号处理单元,然后启动自适应阵型测量功能。自动建立声基阵坐标系,将基元A设为坐标原点,基元B为Y轴方向,AB间声程Lab的1/2就是by,然后依次测得Lac、Lad、Lbc、Lbd,利用两圆几何交汇就可以计算出基元C和基元D在声基阵坐标系中的位置。
完成阵型计算后,再使用高精度卫星罗经,将其前、后天线分别放置在A、B这2个基元入水位置,即可完成阵型原点A和基线AB在大地坐标系下的GPS位置和基线方位,从而实现4个声基元在大地坐标系下准确、实时的坐标位置信息。当基元AB的距离5 m以上时,采用型号为AsteRx-m2a的双天线卫星罗经,定向误差最优可达 0.03°,定位误差最优可达到单点1.2 m、差分0.4 m,满足中远距离水声定位的精度要求。
3 同步合作声信标时延解算
时延解算是定位数据处理的首要流程,为了提高测距精度,发射信号的波形选择是优先考虑的因素。主动声脉冲信号一般以窄带的CW信号和宽带的LFM这2种信号形式为主,对应的处理方法为上升沿检测和匹配滤波处理。不同信号波形具有不同信号参数(如振幅、相位等),会有不同的检测处理结果,直接影响测距性能,进而影响定位精度。考虑到本系统主要用于在静止或低速移动的船只或平台上使用,更适合采用宽带LFM信号制式,信号经匹配滤波处理后,采用互相关方式进行检测[7],可以获得较高的处理增益,具有较高的距离分辨力,并有效降低混响的谱级,从而提高检测能力和测距精度。
对匹配滤波器来说,增加信号带宽、提供接收信噪比,有利于信号的检测。但信号带宽的增加也受到系统设备复杂度和信道窄带条件的制约,带宽增加将破坏信道的窄带条件(B/f0<0.1~0.3),加剧信道频散效应。综合考虑,本系统的发射信号考虑选取15 kHz、20 kHz这2个频段进行测试比较。
试验水域位于某湖上试验场的一个直线段水域,为近距离的非开阔水域环境,其边界的多途反射严重且与直达声时延间隔短,对时延解算有一定影响。为尽量减少直达信号与反射信号的混叠,本定位系统从信号发射端考虑适当减小声脉冲信号的脉宽参数。为此系统测试了5 ms、1 ms和0.5 ms脉宽信号的解算效果。

图6 脉宽1 ms信号波形及匹配滤波解算Fig.6 Pulse width 1 ms signal waveform and matched filtering solution

图7 脉宽0.5 ms信号波形及匹配滤波解算Fig.7 Pulse width 0.5 ms signal waveform and matched filtering solution
发射脉宽5 ms时,脉宽后半段信号幅度强于前半段,原因为水面反射、船反射等多途信号的叠加增强,不利于直达时延的解算。发射脉宽 1 ms时,反射波还是叠加至直达波尾部导致多途峰值超过了首达峰值。发射脉宽 0.5 ms时,接收波形上便可清晰地将直达声与反射声区分,不易发生直达波与反射波的混叠,可有效抑制多途干扰的影响,解算的直达声时延更稳定,因此本系统优选发射脉宽为0.5 ms。
4 短基线定位算法
在短基线定位系统中,主要用到的是球面交汇方法。为了使水下定位得到唯一解,至少需要使用3个基元,为了用最小二乘法求得最佳解,一般采用4个或以上的不共面基元阵型求解。

图8 球面交汇定位原理示意图Fig.8 Principle diagram of spherical intersection positioning
在此我们假设4个基元的坐标分别为A(X1,Y1,Z1)、B(X2,Y2,Z2)、C(X3,Y3,Z3)、D(X4,Y4,Z4),其中A、B、C、D不共面(本系统中A、B、C这3个基元布深10m,D基元布深15m);设要定位的目标位置P为(X,Y,Z),P点到A、B、C、D这4点的R1、R2、R3、R4斜距,则定位方程为
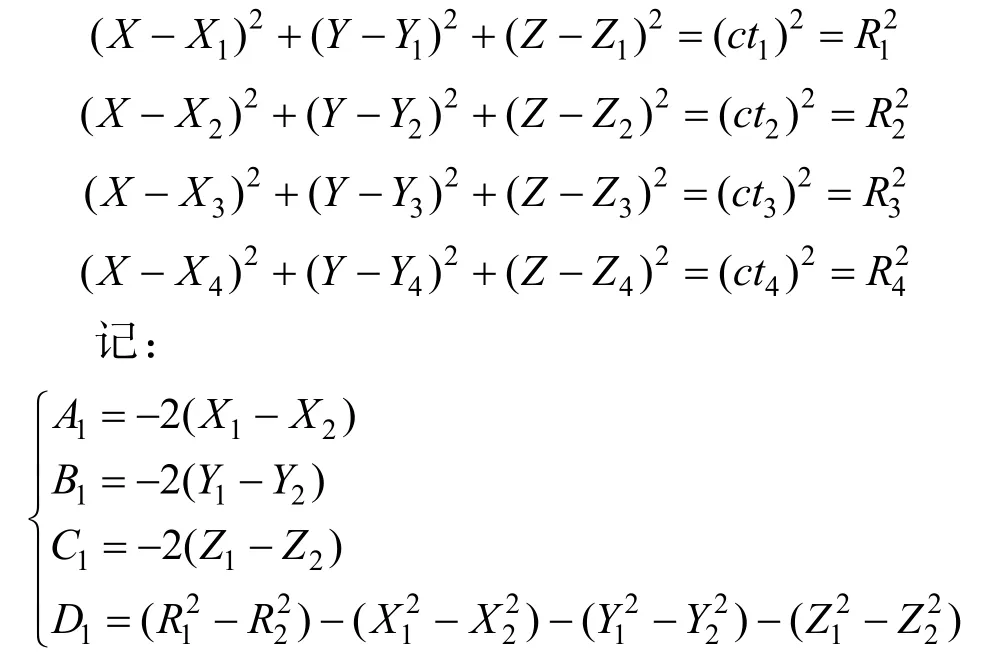
则可改写为矩阵形式:Ax=B
式中:

求解矩阵方程:x=A-1B,即可得到目标最终的位置信息。
5 定位误差分析
对定位方程两边求全微分得:

式中:dx、dy、dz为目标在该坐标系下的位置误差;dxi、dyi、dzi为第i号阵元在该坐标系下的位置误差;dc是水中声速误差;dti为第i号阵元的应答信号至目标的传播时延误差。
由上式可以看出,如果不考虑仪器设备及电子线路等的影响,单从声学角度考虑,短基线定位系统的定位误差主要有以下3个因素引起:各阵元位置误差(测阵误差)、信号传输时间测量误差(测时误差)、声速测量误差(声速误差)。对测量误差精度的影响主要来自于角度的计算误差,当纵倾角、横摇角、短基线基阵的测量误差达到 1°,引起的测量精度误差就会超过 1%[8],本系统通过对阵元位置的精确标定,使其2 km的定位误差最优达到2 m。另外,如果要得到目标在大地坐标系下的实时位置,要进行一次大地坐标系转换,还需要考虑GPS定位和定向误差。同时,2个卫星天线顶端组成的面与船只水平面也会存在一定的夹角。因此,在双天线安装完成后,需要进行姿态数据的校准分析,获得相对固定的偏角和夹角,在实际测量时进行简单的修正便可对安装偏差进行校正[9-14]。
6 结束语
本文提出了一种可快速布置、自动适应阵型、基于同步信标的高精度船载短基线水声定位系统。该定位系统由4个不共面的声基元组成,通过LFM声脉冲回波测距完成快速的自适应阵型计算,目标信号经匹配滤波处理后,采用互相关方式完成时延检测,再采用最小二乘法求得最佳目标水下位置解。通过实物样机的研制和湖上试验,验证了系统在湖上水声定位试验中的可以实现对水下目标的高精度定位,具有良好的工程推广应用价值,对其它水声定位系统的设计具有一定的借鉴意义。
猜你喜欢
高中数理化(2023年6期)2023-08-26 13:28:24
中国畜禽种业(2022年8期)2022-09-17 03:29:14
小哥白尼(神奇星球)(2020年5期)2021-01-18 05:02:38
科学导报(2018年30期)2018-05-14 12:06:01
铁道通信信号(2018年3期)2018-04-19 02:32:56
冰雪运动(2016年5期)2016-04-16 05:55:13
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
水道港口(2015年1期)2015-02-06 01:25:45
Chinese Journal of Chemical Engineering(2014年3期)2014-07-24 15:40:13
电视技术(2012年12期)2012-06-26 09:51:46