应用于光储系统中的改进型扰动观察MPPT算法
2022-04-21 04:41郑含博郭文豪唐钰本崔耀辉覃团发
控制理论与应用 2022年3期
郑含博 杜 齐 郭文豪唐钰本崔耀辉覃团发
(1.广西电力装备智能控制与运维重点实验室(广西大学),广西南宁 530004;2.广西大学电气工程学院,广西南宁 530004;3.广西大学计算机与电子信息学院,广西南宁 530004)
1 引言
近年来,为了应对化石能源日益枯竭、环境污染以及气候变化等问题,清洁能源越来越受到国际社会的重视.由于太阳能具有能源总量大、资源易开发、清洁无污染等优点,光伏发电技术正在成为各国研究和利用的重点[1–2].由于光伏电池本身的输出特性受环境条件(如太阳辐照度与温度)的影响,并且其伏安特性曲线为非线性.为了提高光伏电池的发电效率,本文引入了最大功率点跟踪(maximum power point tracking,MPPT)技术[3],使光伏电池获得最大功率输出.
MPPT算法种类繁多,其中目前使用最为广泛的为扰动观察法(perturbation and observation method,P&O)[4–7],与电导增量法(incremental conductance method,INC)[8–11],这是因为其算法简单易实现,且可以较好地达成追踪效果.文献[12]通过理论和试验证明了在静态和动态条件下,P&O和INC的跟踪性能基本相同,考虑到它们具有相同的原理,表现出相同的行为和性能,可以得出两种方法是等价的.由于传统P&O与INC步长固定,导致其无法兼顾快速追踪最大功率点以及稳态时保持低振荡.当步长过大时,稳态振荡也会很大,系统稳定性变差且造成能量的损失;当步长过小时,追踪最大功率点时间会增加,追踪效果变差[13].此外,这两种方法在外界环境突变时会产生较大波动,重新追踪到(maximum power point,MPP)耗时较长[14].本文提出了一种改进型扰动观察MPPT算法,该算法较之传统P&O和INC有着如下优势:1)通过变步长实现快速追踪MPP,同时实现稳态时无振荡;2)不需要额外增加传感器,只通过电压、电流变化情况感知外界条件突变;3)可以快速响应外界环境突变时的最大功率点追踪;4)贴近实际情况,在光储混合系统中可以良好运行.
2 光伏电池输出特性
图1为通过MATLAB中光伏(photovoltaic,PV)模块得到的单个光伏电池的I–U和P–U特性曲线,它表示了在特定的光照强度和温度条件下,光伏电池的输出电流I(功率P)与输出电压U之间的关系.
其中,图1(a)为25℃ 时不同光照下I–U曲线图,(b)为25℃ 时不同光照下P–U曲线图,(c)为1000 W/m2光强时不同温度下I–U曲线图,(d)为1000 W/m2光强时不同温度下P–U曲线图.
由图1(b)和(d)可知,在同一光照强度与温度条件下,光伏电池的P–U曲线类似于一条抛物线,假设当光伏电池输出最大功率Pm时,输出电压为Um,输出电流为Im,则当光伏电池输出电压在0到Um时,输出功率随着输出电压的增大而增大,并且其斜率先是接近于一条直线,然后逐渐减小直至变为0(此时输出功率为最大值Pm),之后斜率由0继续减小为负值,输出功率开始逐渐降低.此外,随着光照强度的增加,光伏电池输出的最大功率Pm也随之增加,随着外界温度的增加,光伏电池输出的最大功率Pm随之减小,并且光照强度较温度而言对最大功率Pm的影响更大.

图1 光伏电池P–U,I–U特性曲线Fig.1 I–U and P–U characteristic curves of photovoltaic battery
由图1(a)和(c)可以看出,在同一光照与温度条件下,光伏电池的理论输出电压与输出电流可以是I–U特性曲线上的任意一点的情况,那么光伏电池的实际输出电压与输出电流要怎么确定呢?这取决于外部负载阻抗的情况.下面简单分析一下光伏电池的输出原理[15].图2为光伏电池功率输出等效电路图,可以把光伏电池看作是一个有内阻R0的电压为U0的电压源,其外部负载为可变电阻RL,则可以根据以下公式求出实际输出电压与输出电流的值:

图2 光伏电池功率输出等效电路图Fig.2 Equivalent circuit diagram of photovoltaic cell power output
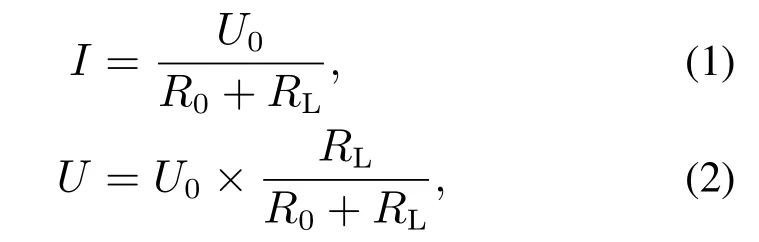
其中:U0表示该时刻光伏电池的内电压;R0表示光伏电池的内电阻;RL表示外部负载的电阻;I表示光伏电池的实际输出电流;U表示光伏电池的实际输出电压.
基于光伏电池的工作特性,引入了最大功率点跟踪技术,在不同环境下通过控制算法及外部电路来调节外部等效电阻的阻值,以此改变光伏电池的输出电压与输出电流,从而让光伏电池持续保持最大功率输出,并提高光伏电池的发电效率,将光伏能源最大化转化为电能.
3 传统P&O介绍
传统P&O的原理就是引入一个小的变量,然后对当前工作点状态进行观测,并与前一个状态进行比较,根据比较的结果调节光伏电池的工作点[16].具体来说就是,当增大(或减小)光伏电池的输出电压,然后对光伏电池的输出电压和输出电流进行采样,并计算出对应时刻的输出功率,将该功率与电压变化前的功率进行比较,如果本次控制使功率增大,则继续增大(或减小)光伏电池输出电压;如果本次控制使功率减小,则反向减小(或增大)光伏电池输出电压,以此来使光伏电池的输出功率一直向增大的方向变化,通过反复扰动与观察,最终输出功率将达到最大值Pm,实现最大功率
基输于出以[17上].原理,用的值可以更方便地了解光伏电池的工作状态并作出调节:1)当大于0时,输出电压在最大功率点电压Um的左侧,此时应该增大输出电压;2)当等于0时,输出电压即为最大功率点电压Um,此时应该保持输出电压不变;3)当小于0时,输出电压在最大功率点电压Um的右侧,此时应该减小输出电压[18].
图3为传统P&O的算法流程图.
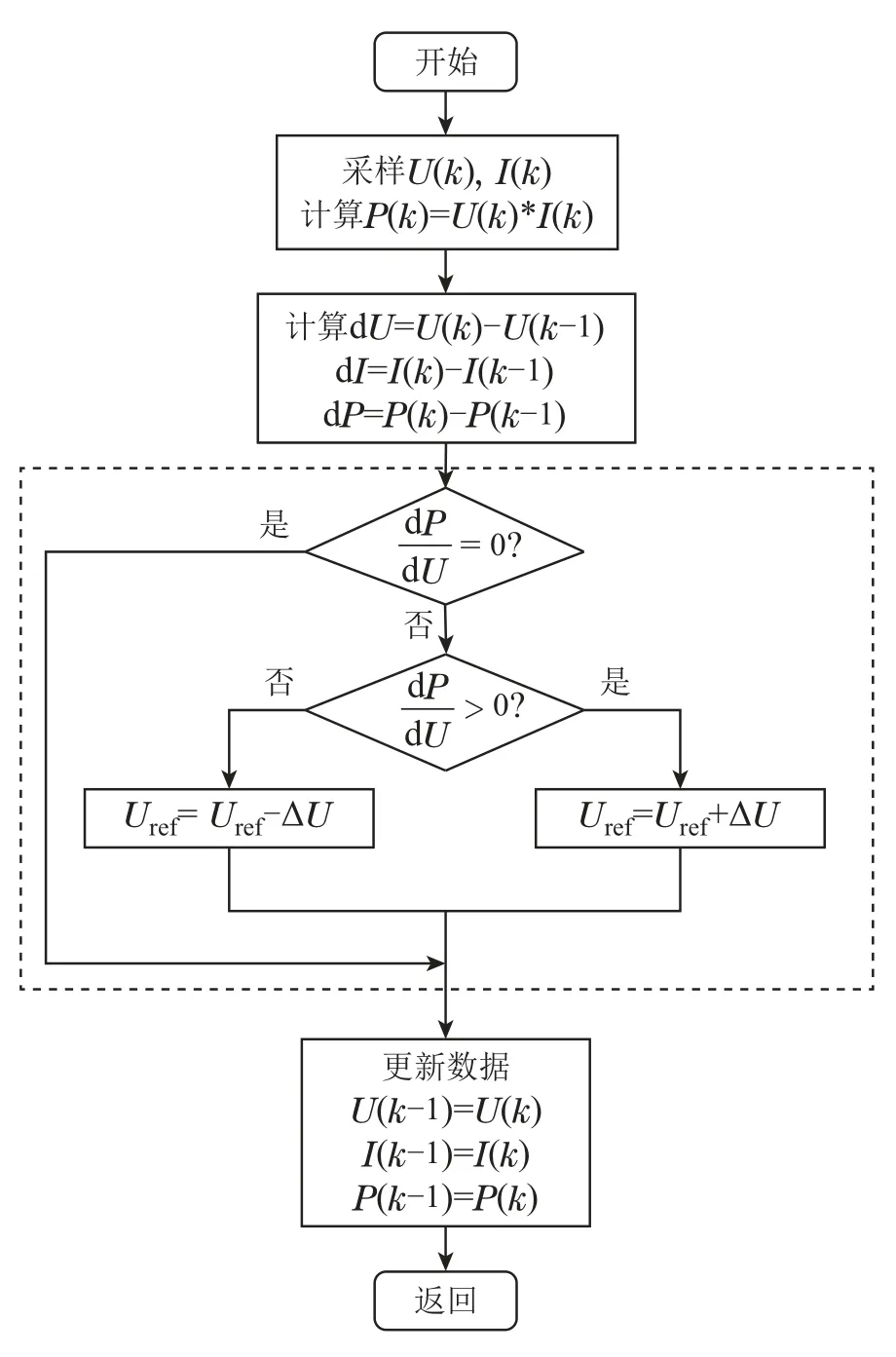
图3 传统P&O算法流程图Fig.3 Flow chart of traditional P&O algorithm
图4为外界环境不变时,传统P&O的P–U曲线中相应的工作点移动图.图4(a)为第1种情况,当工作点由A点移动到B点时,此时电压增大,功率也增大,大于0,则工作点由B点继续向右移动至C点,此时电压增大,而功率减小,小于0,则工作点由C点向左移动.由于传统P&O步长固定,所以最终稳态时工作点按照A–B–C–B–A循环移动,而输出功率同样在PA,PB,PC之间波动,最大波动范围为(PB~PC).图4(b)为第2种情况,当工作点由A点移动到B点时,此时电压增大,而功率减小,小于0,则工作点由B点向左反向移动至A点,此时电压减小,而功率增大,小于0,则工作点由A点继续向左移动至C点,此时电压减小,功率也减小,大于0,则工作点由C点向右反向移动至A点.最终稳态时工作点按照A–B–A–C–A循环移动,输出功率在PA,PB,PC之间波动,最大波动范围的大小为(PA~PC)(PB>PC时)或者(PA~PB)(PC>PB时).图4(c)为第3种情况,当工作点由A点移动到B点时,B点刚好为最大功率点电压Um,此时工作过程与第1种情况类似,最终稳态时工作点按照A–B–C–B–A循环移动,最大波动范围为(PB~PC),此时PB为Pm.

图4 P–U曲线中相应的工作点移动图Fig.4 A diagram of the corresponding movement of operating points in the P–U curve
4 改进型P&O
改进型P&O在传统P&O的基础上作了一系列优化,弥补了传统P&O的诸多不足,以下对各种优化改进及其原理进行介绍.
4.1 追踪速度及稳态振荡优化
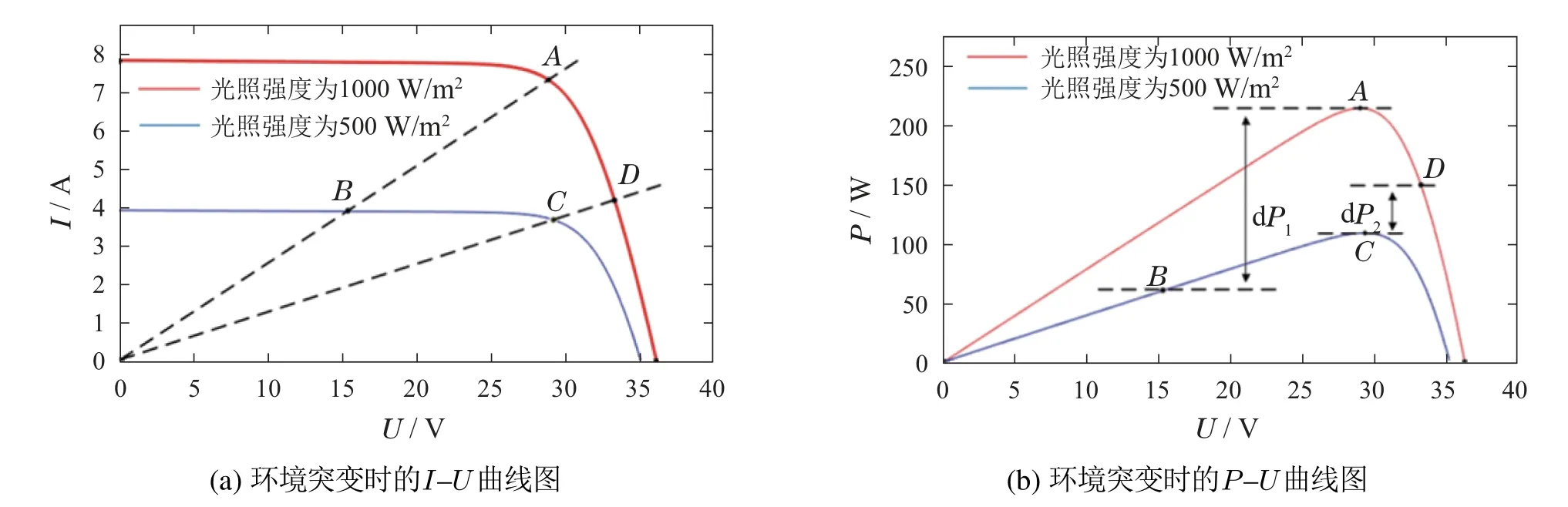
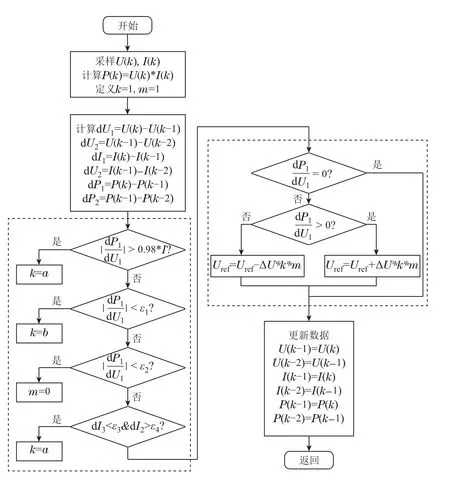
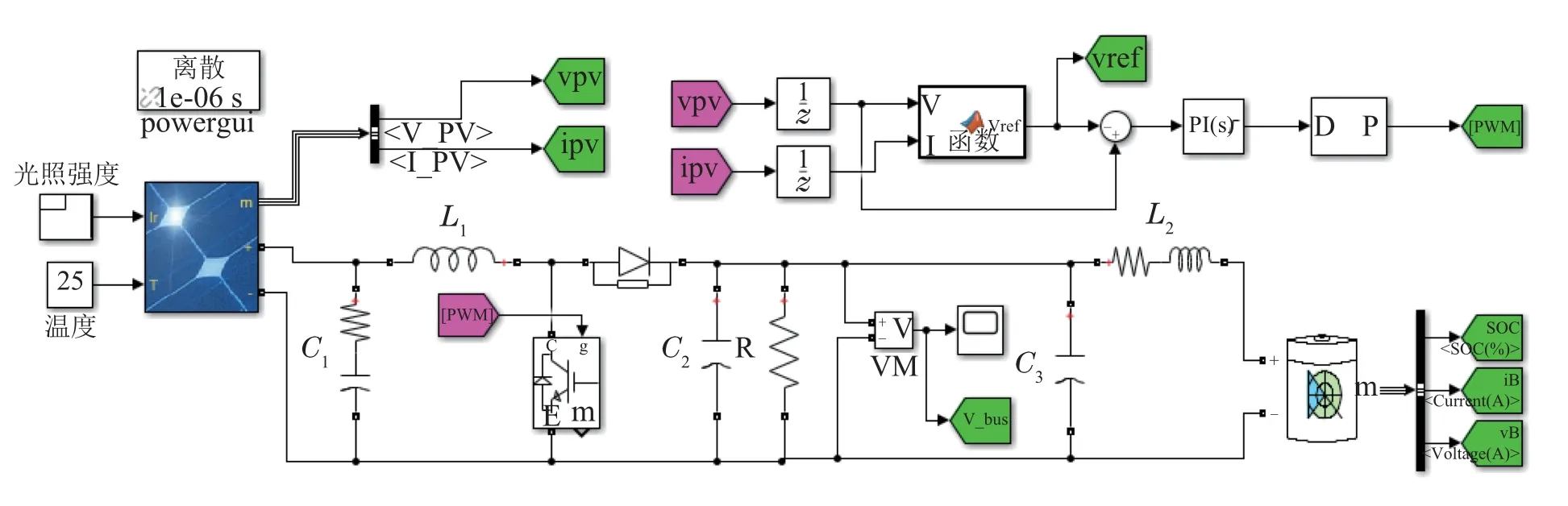
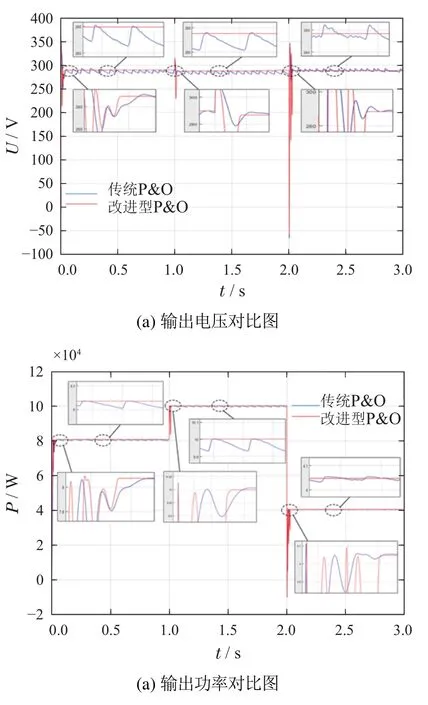
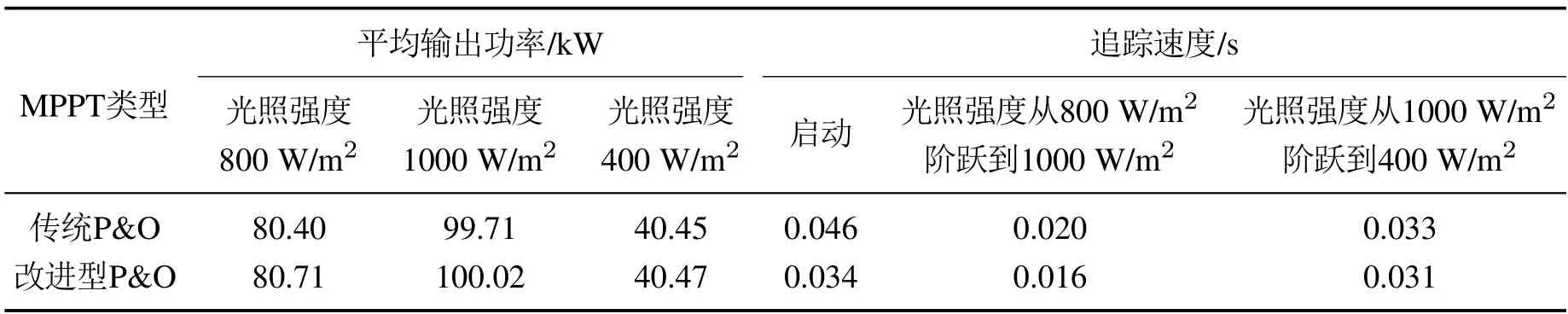
通过对传统P&O的原理了解,可以发现其追踪速度与稳态时的振荡幅度都与步长有关,当步长较大时,系统可以更快速地追踪到最大功率点附近,但最终稳态时其波动范围也会很大;当步长较小时,最终稳态时的波动幅度会减小,但追踪到最大功率点附近花费的时间会较长.为了解决这个矛盾,改进型P&O采用了三段式自适应变步长的方法,为此本文引入了步长变化系数k.由光伏电池的P–U特性曲线,可以发现光伏电池的输出功率由0升至Pm的过程中,前面绝大部分时间斜率近似于一个常量,并且其值非常接近于此时的电流I,于是可以在这段时间令k>1(具体取值可以根据情况而定),使追踪速度大大加快.当工作点在最大功率点附近时,斜率在0附近变化,于是可以在|| 传统P&O在外界环境发生突变后,会产生非常大的波动,之后重新追踪最大功率点要花费很长的时间.改进型P&O可以在不加入额外传感器设备的情况下,仅通过电压,电流的变化情况识别出外部环境的变化,并重新调节步长,使得系统可以更快的重新追踪到最大功率点.图5 为系统达到稳定时,光照环境由1000 W/m2突变为500 W/m2时光伏电池的工作点变化情况(A点到B点),以及光照环境由500 W/m2突变为1000 W/m2时光伏电池的工作点变化情况(C点到D点).在第1章中本文分析了光伏电池的输出特性,由其可以得知当光照条件发生变化时,因为系统外部等效电阻保持不变,所以外部等效电阻的I–U特性曲线不变,所以光伏电池工作点将由A点变化到B点,由C点变化到D点.由图5可以很容易地看出来,当环境突变时,工作点的电压、电流、功率都随之发生了突变.于是,本文利用三点测量法来判断外界环境是否发生突变,其具体方法如下:假设a点时系统处于稳定,其电流为Ia,随后的两次测量分别为b点和c点,电流分别为Ib和Ic,∆I1为Ib与Ia差值的绝对值,∆I2为Ic与Ib差值的绝对值,令ε为一个较小的常数.当环境没有发生突变时,∆I1<ε,∆I2<ε.当环境在b点之后发生突变时,∆I1<ε,但∆I2>ε.总的来说,用前两个点的电流差值来判断系统处于稳态,用后两个点的电流差值来判断外界环境突变,这就是三点测量法.可以用来判断出外部环境的突变情况. 图5 环境突变情况下工作点移动图Fig.5 Diagram of working point movement under sudden environmental change 基于以上的分析,改进型P&O的算法流程图如图6. 图6 改进型P&O算法流程图Fig.6 Flow chart of improved P&O algorithm 为了验证算法的可靠性,本章在MATLAB/Simulink中搭建了光储混合系统的仿真模型,如图7所示,该模型主要由光伏阵列、Boost变换器、负载、储能锂电池以及MPPT控制器组成.其仿真参数如表1所示. 图7 光储混合系统仿真模型图Fig.7 Simulation model of optical storage hybrid system 表1 光储混合系统参数表Table 1 Optical storage hybrid system parameter table 在仿真过程中,设定温度为25℃不变,光照强度刚开始为800 W/m2,在1 s时从800 W/m2跃变为1 kW/m2,为了探究更大幅度的光照变化,在2 s 时从1 kW/m2跃变为400 W/m2.在相同的仿真条件下分别对传统P&O与改进型P&O进行仿真并对比.图8为传统P&O与改进型P&O的输出电压与输出功率的对比图. 图8 传统P&O与改进型P&O的输出电压与输出功率对比图Fig.8 Comparison of output voltage and output power between traditional and improved P&O 从图8可以得出以下数据,传统P&O与改进型P&O在光照强度为800 W/m2时,从开始运行到追踪到最大功率点耗时分别为0.046 s和0.034 s,最终平均输出功率分别为80.40 kW和80.71 kW;当光照强度从800 W/m2跃变为1 kW/m2时,重新追踪到最大功率点耗时分别为0.020 s和0.016 s,最终平均输出功率分别为99.71 kW和100.02 kW;当环境发生更严重突变,光照强度从1 kW/m2跃变为400 W/m2时,重新追踪到最大功率点耗时分别为0.033 s和0.031 s,最终平均输出功率分别为40.45 kW和40.47 kW.经过计算,改进型P&O相较于传统P&O输出功率提升效率最大达到0.39%,追踪所耗时间最多缩短了26%.其仿真比较结果如表2所示.由以上数据可以明显看出改进型P&O相较于传统P&O能更快追踪到最大功率点,同时追踪到最大功率点附近后能停止振荡,持续以较高功率输出,从而减少功率损失,大大提高发电效率,并且经过数据分析,提升效果随着光照强度的增加而愈发显著. 表2 仿真结果Table 2 The simulation results 图9为改进型P&O应用于光储混合系统时的储能电池(state of charge,SOC)变化图,由图可知,储能电池的SOC由初始的45%近线性地增长到45.0042%(1 s时);然后又以更大斜率近线性地增长到45.0113%(2 s 时);最后又近线性地减小到45.0093%(3 s时).之所以会有如此变化,首先是因为当光照强度在800 W/m2和1 kW/m2时,光伏阵列的发电功率大于负载的用电功率,所以剩余电能会用于给储能电池充电,曲线呈上升趋势,并且光照强度越大时,发电功率越大,因此充电速率更快,曲线斜率更大.然而当光照强度在400 W/m2时,光伏阵列输出功率不足以单独供应负载用电,此时储能电池同时给负载供电,所以在2 s到3 s之间储能电池SOC下降.此外由于光照强度不变时,光伏阵列稳态时输出功率恒定,所以储能电池SOC变化情况接近线性.该仿真结果证实了改进型P&O可以应用于实际光储混合系统中,具有实用价值. 图9 储能电池SOC变化图Fig.9 SOC change diagram of energy storage battery 基于传统P&O无法同时兼顾追踪最大功率点速度与稳态振荡,提出了一种改进的步长可变、稳态时无振荡的扰动观察MPPT算法.改进型P&O通过三段式自适应变步长来提高追踪速度,再通过检测输出功率在最大功率点附近而停止扰动,达到消除稳态振荡的目的,最后通过电压、电流的突变情况检测外界环境的突变,之后通过变步长达到快速恢复追踪的目的.本文还将该算法应用于光储混合系统之中,证明了其在实际工程中的实用价值.4.2 感知外界环境变化
4.3 改进型P&O算法流程图
5 仿真与分析


6 结论
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
轻兵器(2017年2期)2017-03-10
科技视界(2016年18期)2016-11-03
轻兵器(2016年20期)2016-10-28
现代电子技术(2015年17期)2015-09-23
坦克装甲车辆·新军事(2009年9期)2009-09-17