
一种改进型IPOS 模块化LCC 谐振变换器控制策略
2022-04-19 02:06杨晓光席利根李宇麒
电源学报 2022年2期
杨晓光,席利根,李宇麒,高 正,温 静
(1.省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学),天津 300130;2.河北省电磁场与电器可靠性重点实验室(河北工业大学),天津 300130)
激光、X-射线、雷达、静电除尘等技术的快速发展,对DC-DC 变换器的电压等级和功率等级有了更高的要求。但因大变比高频变压器制造难度大、分布参数不易控制,大功率半导体开关器件开关速度低、损耗大,高压硅堆反向恢复时间长等因素,高压大功率直流电源的电压等级和功率等级难以提高,不能满足市场要求[1]。因此,通常将不同的倍压电路、多个变压器和多个整流器组合起来,构成不同类型的高压DC-DC 变换器,以满足高输出电压和高额定功率的要求。在这些类型的变换器中,输入并联输出串联IPOS(input-parallel output-series)模块化DC-DC 变换器具有子模块组合灵活的特点,因而能够产生更高的输出电压或更高的功率。然而,各模块的器件参数难以达到完全一致,尤其是高压变压器的分布参数可能存在较大差异。模块间的参数差异可能会严重影响各模块之间的均压,限制了IPOS DC-DC 变换器的应用。
一般情况下,IPOS 系统包含三个控制环路,分别是输出电压控制环路、电流控制环路和电压共享控制环路,其调制方式是PFM[2]或PWM[3]。IPOS 系统控制的主要问题是:一方面要保证各个模块实现软开关,另一方面要协调各个模块的输出均压。文献[4]提出一种基于LC 谐振全桥变换器的IPOS 系统,采用PWM 调制方法,但均压控制过程中需改变脉宽,使得各模块不能很好地实现软开关。由于LCC 谐振变换器能够很好的利用高频变压器的漏感和寄生电容作为谐振参数的一部分,降低了制作高频高变比变压器的难度;同时相比于移相全桥软开关,LCC 谐振软开关又容易实现,单个模块的LCC 谐振变换器一般采用PFM 方法[5-8]。但是,如果IPOS LCC 变换器单纯采用PFM 方法,难以实现模块间的均压;若单纯采用PWM 方法,则难以实现软开关。因此传统控制方法[2-3]难以适用于IPOS LCC系统。文献[9-12]给出一种基于移相全桥的IPOS 系统,系统有稳定的输出,各模块输出也实现了均压。但是由于LCC 变换器中变压器漏感和分布电容较大,若IPOS LCC 变换器采用移相控制,则会导致变换器环流损耗大、变压器二次侧占空比丢失较大以及严重的寄生振荡等。目前,国内外关于IPOS LCC变换器的研究文献较少。
针对上述问题,本文提出了一种IPOS LCC 谐振变换器主从控制策略。主模块采用PFM 方法,不同于传统的等步长调节法,本文基于数学模型准确计算主模块的调频步长,以提高IPOS LCC 变换器的动态性能;从模块采用PWM-PFM 方法,在保证各模块实现软开关的同时,实现各个模块输出均压。选择主从控制策略的原因是,其可靠性高,广泛应用于模块化变换器[13]。
1 LCC 谐振变换器
图1 为LCC 谐振变换器拓扑,串联谐振电感Ls、串联谐振电容Cs和并联谐振电容Cp构成变换器的谐振腔。根据流经Ls的电流连续与否,变换器工作模式可分为电流断续模式DCM(discontinuous current mode)和电流连续模式CCM(continuous current mode)。相比于CCM,DCM 更适合于大功率场合。

图1 LCC 谐振变换器拓扑Fig.1 Topology of LCC resonant converter
全桥LCC 变换器工作过程中,谐振腔的谐振过程包括两元件谐振(Ls,Cs)和三元件谐振(Ls,Cs,Cp)。为方便分析,定义电容比值σ 和等效电压增益M 分别为

式中:Vin为输入电压;Vo为输出电压;K 为变压器的变比。根据等效电压增益M 和σ 的大小关系,DCM 模式又可分为DCM1[M<σ/(1+σ)]和DCM2[M≥σ/(1+σ)]两种模式。文中以DCM1 模式为例进行分析。
全桥LCC 变换器工作于DCM1 模式关键波形如图2 所示。文献[14]已对电路工作模式进行了详细的分析,这里不再赘述,仅给出串联谐振电容Cs不同时刻(t0,t1,t2)的电压表达式,即

图2 DCM1 模式关键波形Fig.2 Key waveforms in DCM1


[t0~t1]和[t2~t3]时间段,变换器向负载传能,可得输出电流为

式中:Ts为开关周期;为流经Ls的电流。而两时段流经Cs的电荷分别为

当变换器稳态工作时,有

联立式(3)~式(9),可得

式中:Q 为谐振腔的品质因数;fsN为开关频率fs的标幺值,分别表示为

式中,f0为两元件(Ls,Cs)串联谐振频率,表示为

2 IPOS 系统控制策略
图3 为IPOS 系统框图,Io为总输出电流,第i(i=1,2,…,n)个单元模块的内部结构为如图1 所示的LCC 变换器。文中所提出控制策略的实现方式如下:①选择输出电压最低的模块为主模块,其他模块为从模块;②主模块通过PFM 调节输出电压稳定到目标电压;③在主模块调压过程中,从模块跟随主模块开关频率,同时调节驱动脉冲宽度,以跟随主模块电压,实现均压控制。主从模块的具体控制方法如下所述。
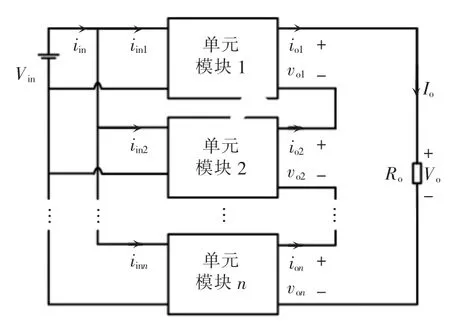
图3 IPOS 变换器框图Fig.3 Block diagram of IPOS converter
2.1 主模块调压控制方法
由式(10)可知,LCC 谐振变换器的等效电压增益受开关频率控制,主模块采用PFM 方法调压。不同于传统的等步长调频调压方法,该方法的频率调节步长由数学模型准确给出,可有效提高调节速度。
由式(10)可得归一化开关频率fsN关于M 的导函数,即

对于LCC 变换器,设计参数(Ls,Cs,Cp,K,Ro)以及输入和输出电压(Vin,Vo)已知。将这些参数和目标增益Mg代入式(10)可得初始fsN,再由式(12)、式(13)可得初始开关频率fs。但由于测量误差或参数漂移,初始开关频率fs下,变换器当前增益Mc和目标增益Mg之间往往存在差异。如果当前增益Mc与目标增益Mg的差值超过误差允许范围,则需确定新的开关频率。具体过程如下:
由式(14)求归一化开关频率调节步长ΔfsN,即

由式(12)求开关频率调节步长Δfs,即

求得新的开关频率,即

在新的开关频率下,如果当前增益Mc仍不满足目标增益Mg的误差要求,则重复上述过程,直到满足要求为止。图4 为IPOS 系统主模块的控制流程,Voi为模块i(i=1,2,…,n)的输出电压,Mi为模块i(i=1,2,…,n)等效电压增益,Mm为主模块等效电压增益,Mg为主模块目标增益,εm为主模块电压增益允许误差。
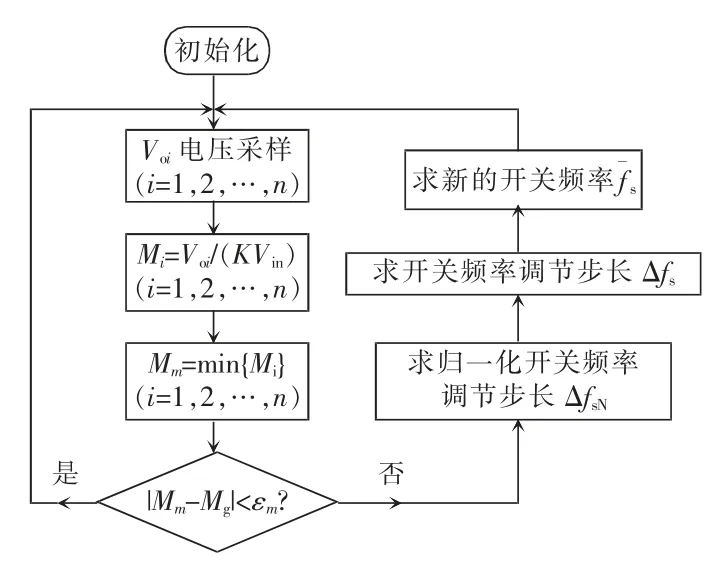
图4 IPOS 系统主模块控制流程Fig.4 Control flow chart of master module in IPOS system
2.2 从模块调压控制方法
从模块采用PWM-PFM 方法调压。图5 为IPOS 系统从模块控制流程,主模块等效电压增益即从模块目标增益,Mi(i≠m)为从模块等效电压增益,η 为从模块驱动脉冲宽度,εs为从模块电压增益允许误差。

图5 IPOS 系统从模块控制流程Fig.5 Control flow chart of slave module in IPOS system
系统上电初始化,对各模块输出电压Voi采样,经计算可得各模块等效电压增益Mi,取最小增益Mm作为主模块电压增益,若|Mi-Mm|>εs(i≠m),则需调节各从模块的驱动脉冲宽度η 来实现输出均压。
3 仿真验证
为保证变换器工作在DCM1 模式,同时反映变压器参数差异,主从模块的参数见表1。

表1 仿真参数Tab.1 Simulation parameters
3.1 主模块调压仿真
搭建电路模型,对主模块调制方法进行仿真分析。初始开关频率20 kHz,输入电压Vin=40 V,目标输出电压Vg=150 V,目标增益Mg=0.469。表2~表4为不同负载下变换器的调压效果,由表可知,文中所提出的主模块调压方法迭代两次即可闭环到目标电压,可准确快速地追踪目标电压,动态效果好。

表2 Ro=45 Ω 时变换器调压效果Tab.2 Converter voltage regulation effect at Ro=45 Ω
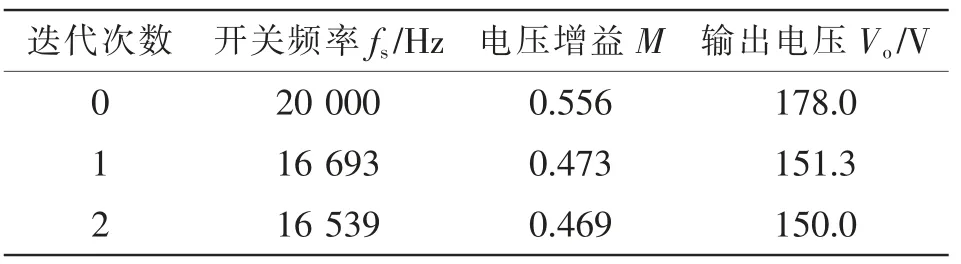
表3 Ro=50 Ω 时变换器调压效果Tab.3 Converter voltage regulation effect at Ro=50 Ω
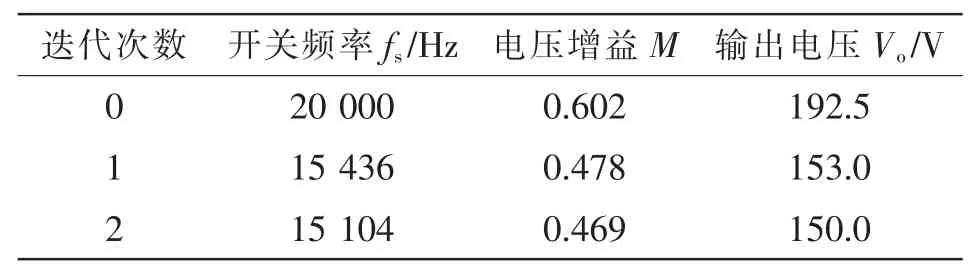
表4 Ro=55 Ω 时变换器调压效果Tab.4 Converter voltage regulation effect at Ro=55 Ω
3.2 从模块调压仿真
搭建电路模型,进行对比仿真分析。仿真实验①:从模块只采用传统PFM 方法,未加入PWM 的闭环控制;仿真实验②:从模块采用PWM-PFM 方法,即在PFM 方法的同时加入PWM 的闭环控制,如图5 所示。仿真实验中,输入电压Vin=40 V,目标输出电压Vg=150 V,目标增益Mg=0.469,设置负载Ro=50 Ω,实验中从模块的开关频率与主模块开关频率一致,初始开关频率16 539 Hz(与表3 稳态时一致)。输出电压与谐振电流稳态仿真波形如图6所示。

图6 输出电压与谐振电流稳态仿真波形Fig.6 Simulation waveforms of output voltage and resonant current in steady state
从仿真结果可知,由于仿真实验①中从模块开关频率与主模块一致,没有加入PWM 的闭环控制,从模块输出电压约为157 V,未能达到150 V,因而从模块只采用传统PFM 方法不能补偿由于主从模块参数差异而导致的输出电压不平衡。而仿真实验②中由于PWM 闭环控制的存在,使得从模块输出电压能很好地跟随主模块输出电压,稳态时输出电压为150 V。因而,从模块通过PWM-PFM 方法可以实现对输出电压的调节,能很好地跟随主模块电压。
4 实验结果
搭建三模块实验样机,进行实验验证,各模块参数见表5。需要说明的是,由于每个从模块只与主模块耦合,而各从模块之间并没有耦合,因此,本文采用3 个模块的实验样机能够验证控制方法的有效性。控制器采用型号为TMS320F28335 的DSP,对各模块输出电压进行采样和比较,将输出电压最低的模块选为主模块,对从模块中加入PWM 的闭环控制效果进行实验验证。

表5 样机参数Tab.5 Prototype parameters
4.1 从模块无PWM 的闭环控制
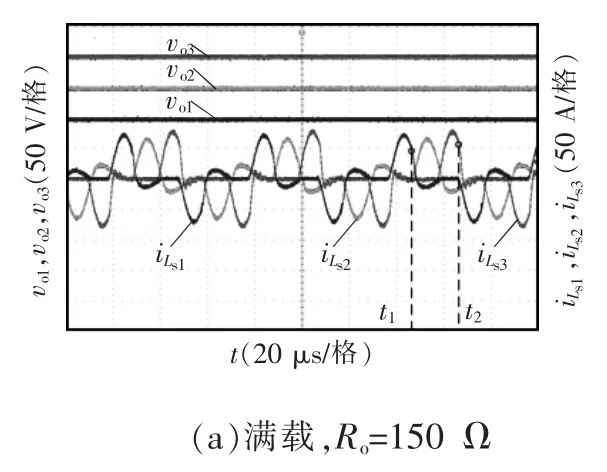
实验条件为:输入电压Vin=35 V,单模块目标输出电压150 V,系统满载时负载电阻Ro=150 Ω,主模块采用如图4 所示的控制方法进行控制,从模块开关频率跟随主模块,但没有PWM 的闭环控制。图7 给出了不同负载下的实验波形,在不同负载条件下,vo2 图7 不同负载下无PWM 的实验波形Fig.7 Experimental waveforms without PWM under different loads 实验条件同第4.1 节一致,从模块采用加入PWM 的PWM-PFM 闭环调制方法。实验结果如图8所示,在不同负载条件下,分别在t1和t2时刻电流斜率发生变化,表明在t1和t2时刻进行了PWM,波形中在相应位置附近没有发生电流斜率变化的现象,因而,根据图5 所示的从模块控制方式可知:vo1和vo3为从模块输出电压波形,vo2是主模块输出电压波形。实验结果表明,从模块与主模块的开关频率一致,采用PWM-PFM 闭环调制方法,使得从模块输出电压能够很好地跟随主模块输出电压,主模块与从模块输出电压都为150 V。 图8 不同负载下有PWM 的实验波形Fig.8 Experimental waveforms with PWM under different loads 为了验证改进型主从控制策略的性能,进行了对比实验,实验条件为:输入电压Vin=35 V,单模块输出电压150 V,系统负载电阻Ro=150 Ω。实验方案①:主模块采用等步长PFM 方法,控制流程如图9所示;从模块采用等步长PWM-PFM 方法,控制流程与图5 一致。实验方案②:主模块采用如图4 所示的控制方式,从模块采用如图5 所示的控制方式。 图9 等步长法主模块控制流程Fig.9 Control flow chart of master module when using the equal step method 图10 为负载扰动输出电压波形。图中,voi分别为模块i(i=1,2,3)的输出电压;系统稳定运行于t1时刻,突减负载(将负载电阻从150 Ω 调为300 Ω),系统在t2时刻重新达到稳态;在t3时刻突加负载(将负载电阻从300 Ω 调回到150 Ω),系统在t4时刻重新达到稳态。由图10 可知,当负载发生突变时,相较于传统的等步长调节法,文中所提出的系统控制策略具有更好的动态性能和抗扰动能力。 图10 负载扰动输出电压波形Fig.10 Output voltage waveforms under load disturbance 本文提出了一种改进型IPOS 模块化LCC 谐振变换器的控制策略,主模块采用PFM 方法,其调频步长由数学模型准确计算所得,从模块采用PWM-PFM 方法,可实现模块间的均压控制和系统的恒压输出。对主从模块控制策略进行了仿真分析,验证了所提出控制策略的可行性。搭建了三模块实验样机,分别进行了从模块无PWM、有PWM的闭环控制实验,验证了所提出控制策略的有效性。负载扰动实验进一步说明了所提出控制策略具有暂态响应快、抗扰动能力强的优点。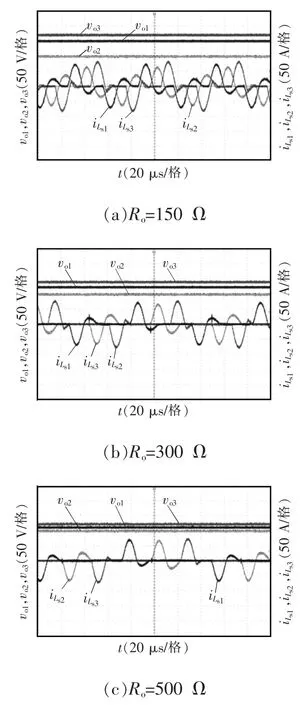
4.2 从模块有PWM 的闭环控制

4.3 系统扰动实验


5 结语
猜你喜欢
电工技术学报(2022年20期)2022-10-29
北京航空航天大学学报(2022年6期)2022-07-02
无线互联科技(2020年12期)2020-09-03
科学导报·科学工程与电力(2019年12期)2019-10-20
科学大观园(2019年10期)2019-09-10
中国经济周刊(2019年9期)2019-05-24
消费导刊(2017年8期)2018-01-18
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
卷宗(2017年1期)2017-03-17
中学物理·高中(2016年4期)2016-05-11
