
P2构型PHEV的规则型能量管理策略
2022-04-15 09:27陈国芳韦永恒邓云霄徐利吉
重庆理工大学学报(自然科学) 2022年3期
罗 勇,陈国芳,韦永恒,邓云霄,任 淋,徐利吉
(重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆 400054)
传统汽车的普及化造成了全球能源短缺和环境急剧恶化等问题。为解决目前人类所面临的难题,研究开发新能源汽车成为了不可逆转的趋势。其中,插电式混合动力成为了汽车电动化转型的一个重要途径。插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)具有低排放、低油耗、无续航里程焦虑等优势,兼具传统燃油汽车与纯电动汽车的优点。混合动力汽车具备了2种及其以上的动力源,既能解决传统燃油车带来的高油耗和高排放问题,又能弥补纯电动汽车的行驶里程不足的缺点[1-2]。
想要提升混合动力汽车的燃油经济性、提高其整车性能,必须设计出有效的混合动力能量管理策略。混合动力汽车常见的能量管理策略有多种形式,大体分为基于优化型的能量管理策略(如模型预测、人工神经网络)和基于规则型的控制策略等[3-5]。其中,基于规则型的控制策略又分为基于确定规则的控制策略和基于模糊逻辑的控制策略。基于确定规则的控制策略是在传统的最优控制方法的基础上进行了综合设计,提出的一种基于规则的监督控制方法,从而使燃油消耗最小化。可通过动态规划算法提高基于规则控制的能量管理策略性能,同时可用发动机MAP图将混合动力汽车实时控制在高效区,进而达到改善燃油经济性的目的[6-8]。
根据发动机特性曲线划分P2构型PHEV工作模式,并通过逻辑门限的思想建立相应的能量管理策略。通过设置逻辑门限值,综合考虑车速、整车需求扭矩及电池荷电状态(state of charge,SOC)等控制参数,合理选择不同工作模式驱动车辆以使整车工作效率最优。同时,根据发动机工作区域划分整车工作模式,基于逻辑门限值思想提出电量消耗和电量维持的多阶段能量管理策略。结合Simulink搭建整车模型并仿真。
1 P2插电式混合动力系统结构
本文研究对象基于P2插电式混合动力系统,主要包括发动机、P2驱动电机、离合器、动力电池组、主减速器等子系统,整车P2构型PHEV系统结构如图1所示[9]。

图1 P2构型PHEV系统结构简图
根据图1所示的系统结构简图可得,该系统的动力源由发动机和P2驱动电机共同组成。P2驱动电机置于离合器C1之后,同时置于C2之前。当离合器C2&C1结合,此时P2驱动电机单独驱动车辆;当离合器C2结合,此时P2驱动电机空转不输出扭矩,发动机可以单独驱动车辆,可以与P2驱动电机共同通过变速器增扭后输出至轮端,也可以通过发动机输出扭矩至P2驱动电机发电的同时驱动车辆行驶,实现行车充电模式。
其中,发动机和P2驱动电机可根据整车运行工况扭矩需求进行协调,合理分配输出驱动扭矩。本文研究对象的工作模式主要包括以下6种,分别为:纯电动模式、发动机模式、行车充电模式、混合动力模式、制动能量回收模式以及停车充电模式。不同工作模式下,2个动力源及离合器工作状态如表1所示。

表1 各部件在不同工作模式下的工作状态
2 基于规则的能量管理策略
能量管理策略作为PHEV的核心技术之一,其设计需遵循以下原则:动力电池能量耗尽原则、驱动优先原则、再生制动最大能量回收原则。其中,根据动力电池组消耗过程可分为电量消耗阶段(charge-depleting,CD)和电量维持阶段(charge-sustaining,CS)[10]。电池组具体消耗过程如图2所示。

图2 电池组电量消耗过程分析示意图
2.1 电量消耗阶段(CD)
此阶段包括纯电动模式、混合动力模式、停车充电模式和制动能量回收模式。其中制动能量回收模式又可根据不同的情况分为电机制动、机械制动和混合制动。工作模式间切换逻辑和扭矩分配如表2所示。
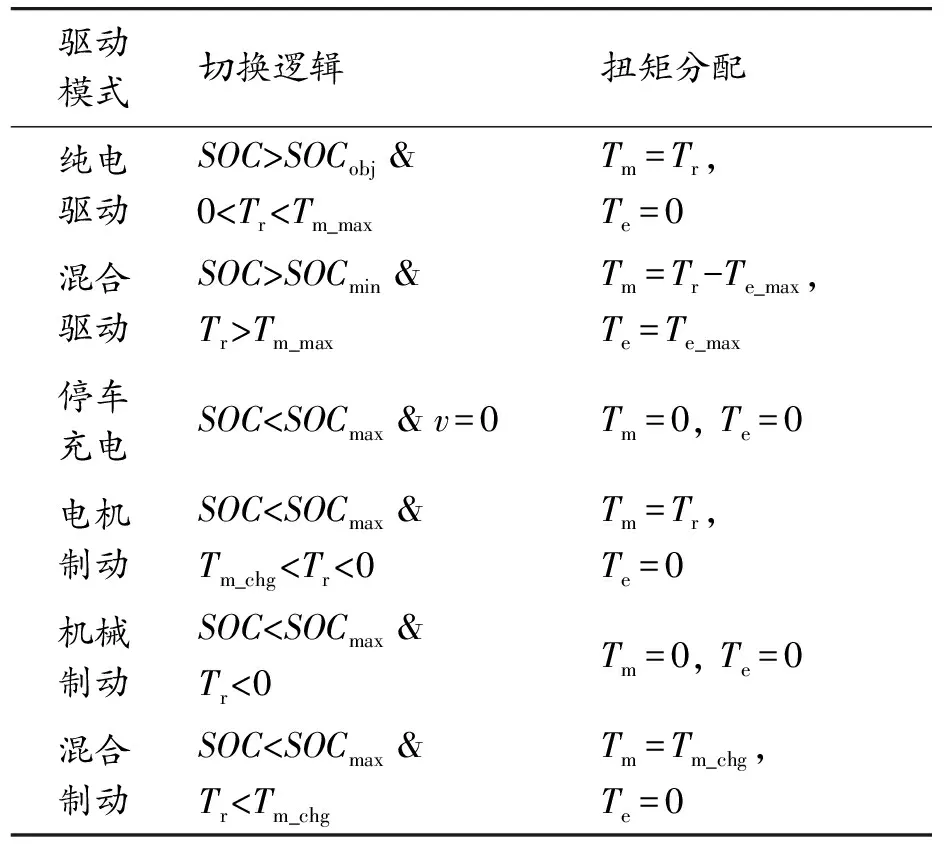
表2 CD阶段模式切换逻辑与扭矩分配
此阶段主要以P2驱动电机驱动为主。当车辆动力需求较大时,P2驱动电机无法满足整车扭矩需求,采用混合动力模式;在汽车减速或制动工况下,制动强度小,根据再生制动最大能量回收原则选择P2驱动电机优先制动;若制动强度较大,为保证安全制动,使P2驱动电机输出最大制动力矩;当电池组电量充足时,采用机械制动提供制动力矩;停车状态下则使用外接电源为车辆充电。
根据上述分析,电量消耗阶段的控制策略工作流程如图3所示。

图3 电量消耗阶段的控制策略工作流程框图
2.2 电量维持阶段(CS)
电量消耗阶段后,电池组电量较低,进入此阶段。电量在一定区间内稳定波动。此阶段主要以发动机驱动为主,P2驱动电机通过调节发动机工作点,使其工作区域效率最优。发动机工作区域划分如图4所示。

图4 发动机工作区域划分示意图
CS阶段包括纯电动模式、发动机模式、混合动力模式、行车充电模式、停车充电模式、电机制动、机械制动和混合制动。工作模式之间的切换逻辑和扭矩分配如表3所示。
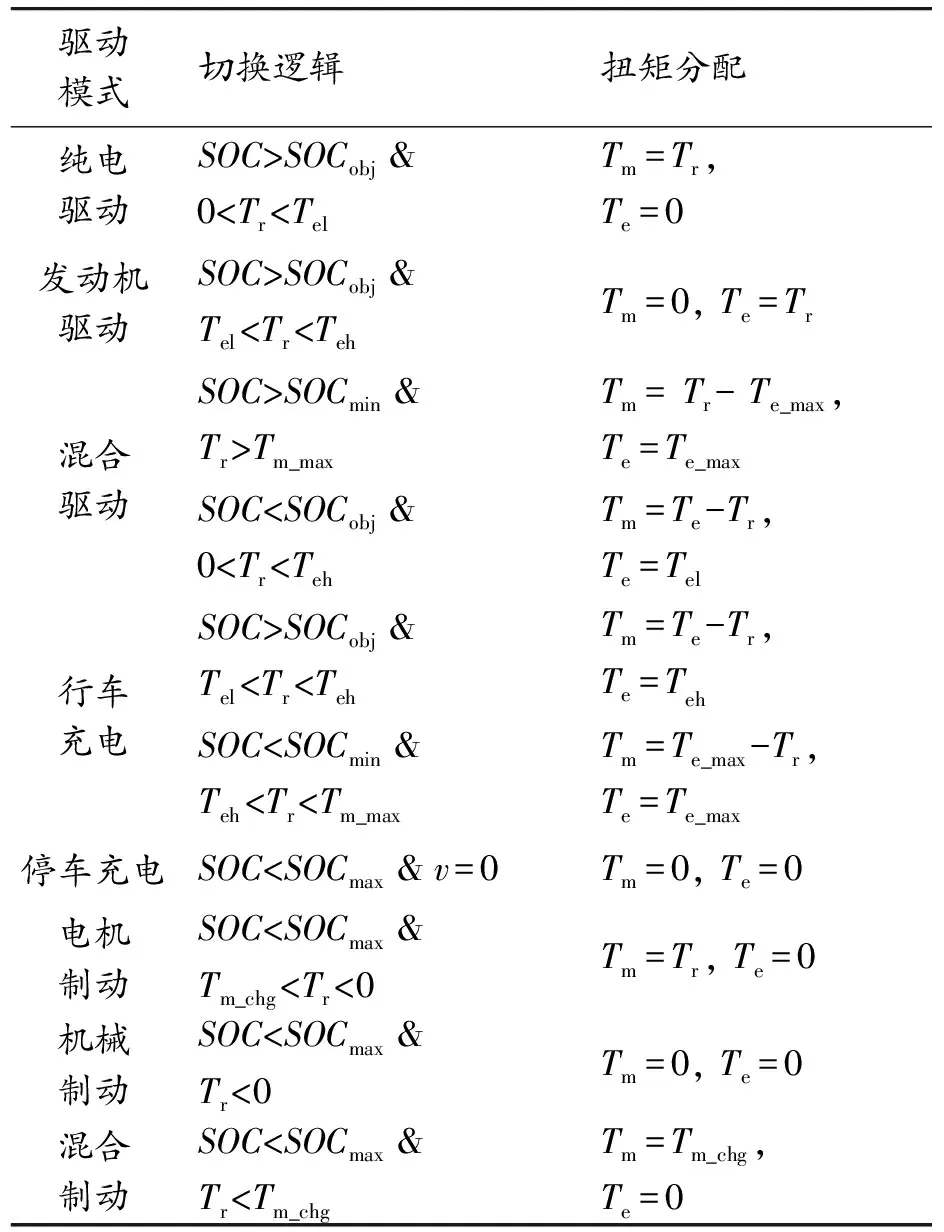
表3 CS阶段模式切换逻辑与扭矩分配
A区域:发动机输出最大驱动扭矩Te_max,P2驱动电机输出Tr-Te_max,发动机与电机同时工作。
B区域:发动机输出最大驱动扭矩Te_max,超出需求部分给电池主动充电。
C区域:若SOC
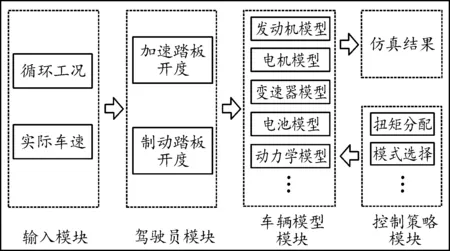
D区域:若SOC>SOCobj,整车需求扭矩由P2驱动电机提供;若SOC 根据上述分析,电量维持阶段的控制策略工作流程如图5所示。 图5 电量维持阶段的控制策略工作流程框图 结合前文对P2构型结构特点分析和规则的能量管理控制策略制定,基于Matlab/Simulink建立了P2构型能量管理仿真模块,如图6所示。该模型主要分为输入模块、驾驶员模块、车辆模型模块、控制策略模块。其中,关键器件模型包括发动机特性模型、电机特性模型、电池模型、车辆纵向动力学模型;控制策略模块主要包括扭矩分配、模式选择等模块。 图6 P2构型能量管理仿真模块框图 通过标定实验,建立了描述发动机油耗率、转速和扭矩之间关系的二维插值数值模型,如图7所示。 图7 发动机油耗率、转速和扭矩之间关系的二维插值数值模型示意图 根据式(1)-(3)计算可得发动机的燃油消耗率、最大扭矩和单位时间油耗[11]。 be=f(ne,Te) (1) Te_max=f(ne) (2) (3) 式中:be为发动机当前燃油消耗率;ne为发动机转速;Te为发动机扭矩;Pe为发动机功率;b为燃油消耗率;ρ为燃油密度;g为重力加速度(汽油ρg取为6.96 ~ 7.15 N/L)。 通过电机台架试验获得数据并建模,忽略其内部复杂结构和控制过程。根据输入驱动电机扭矩及转速,基于插值法可得电机效率。驱动电机外特性及效率模型如图8所示。 图8 驱动电机外特性及效率模型示意图 电机最大扭矩、功率可表示为: Tm_max=f(nm) (4) (5) 电机放电电流Im1与充电电流Im2分别为: (6) 电机效率为: ηm=f(Tm,nm) (7) 式中:ηm为电机效率;Vm为电池组电压。 忽略动力电池内部电化学反应及温度影响,采用理想等效电路建模[12]。动力电池等效电路如图9所示。 图9 动力电池等效电路示意图 图9中,Cs表示电池放电电压快速上升过程,为电池动态特性中表现的短时间常数,CL表示电池放电电压缓慢稳定过程,为电池动态特性中表现的长时间常数[13]。 电池端电压根据式(8)计算: U=Voc-Vs-VI-ReI (8) 电池回路电流计算: (9) 式中:U为电池端电压;Voc为电池开路电压:Re为电池内阻;I为电池电流;Vs、VI分别为Rs、RI两端的电压;R、P为动力电池组总功率。 电池荷电状态(SOC)用来反应电池剩余容量,其数值上定义为剩余容量占电池容量的比值,可采用安时积分法计算: (10) 式中:SOC0表示电池充放电起始时刻SOC;SOCt表示t时刻SOC;C表示电池额定容量。 车辆在行驶过程中,动力源传递的扭矩通过离合器、变速器、主减速器等传递至车轮处。需考虑整车轮胎滚动阻力、空气阻力、坡度阻力、加速阻力[11]。具体整车动力学表达式为: Tf=r·(mg·sinθ+mgf·cosθ+ (11) 式中:m为整车载荷;g为重力加速度;f为滚动阻力系数;θ为爬坡度;r为车轮半径;CD为风阻系数;A为迎风面积;v为车速;ηt为变速器效率。 根据对P2插电式混合动力系统的分析及关键器件建模,整车部分基本参数如表4所示。 表4 整车部分基本参数 选择NEDC作为目标工况进行仿真,连续运行8个NEDC循环工况。为有效地模拟CD/CS模式的切换,将动力电池初始值设为0.9,设置SOCmax=0.9,SOCmin=0.3,SOCobj=0.35。 图10为车速跟踪仿真验证结果。从图10可以看出,NEDC工况下实际车速和目标车速跟踪效果良好,表明本文控制策略稳定性及模型的正确性。 图10 车速跟踪仿真验证结果曲线 图11为发动机输出扭矩,图12为发动机工作点图。 图11 发动机输出扭矩示意图 图12 发动机工作点示意图 从图中可看出,发动机的输出扭矩大部分都处于高效扭矩区域内,表明发动机长期工作在最优区域,可有效改善车辆的燃油经济性。从工作频率上看,发动机在CD阶段的工作频率明显高于CS阶段。CS阶段为维持电池的SOC,主要由发动机工作提供能量,而CD阶段电池SOC较高,此时主要依靠电机驱动车辆。 图13为电机输出扭矩示意图。由图13可以看出,电机扭矩以正负形式输出,表明工作中电机在电动和充电状态之间进行切换,结合SOC变换曲线可看出,该控制策略控制效果良好。同时,CD阶段的电机输出扭矩明显大于CS阶段的输出扭矩,表明CD阶段主要由电机工作驱动车辆行驶。 图13 电机输出扭矩示意图 从发动机输出扭矩图和电机输出扭矩图可得:该控制策略能够根据车辆扭矩需求对发动机和电机的扭矩进行合理协调,实现不同模式的驾驶性能需求,验证了该控制策略的有效性良好。 图14为动力电池SOC变化曲线。可以看出,初始阶段电池处于电量消耗时期,随时间增加,电池SOC不断下降,靠近电量维持阶段附近时下降趋势有所减缓。当其下降到SOCobj=0.35时,进入CS阶段。此阶段后,SOC维持在SOCobj上下。整个过程,电池SOC始终保持在0.3~0.9,有效减少电池损伤,增加电池使用寿命。 图14 动力电池SOC变化曲线 图15为传统燃油车和P2构型插电式混合动力汽车的燃油消耗量随时间的变化关系。由图15可知,PHEV在初期以电机工作为主,燃油消耗明显减少。但是随着时间推移,电池电量被逐渐消耗,发动机逐渐参与驱动,到CS阶段发动机起着主要作用,所以此阶段油耗明显增加。与此同时,P2构型插电式混合动力汽车百公里油耗5.36 L,相比传统燃油车百公里油耗6.94 L,燃油经济性提高了22.76%。 图15 传统燃油车和P2构型插电式混合动力汽车的燃油消耗量随时间的变化曲线 参考某P2构型插电式混合动力汽车,搭建了其整车模型,提出了包含CD模式和CS模式的基于规则的能量管理策略。根据发动机油耗MAP图对系统模式切换逻辑进行划分以及整车扭矩分配;结合Matlab/Stateflow建立整车控制策略模型;最后仿真分析验证了所设计的能量管理策略能够较好地实现对整车的基本控制,合理地进行模式的切换,扭矩分配较为合理;对后续采用优化方法设计能量管理策略具有指导意义;相比传统燃油车每百公里节省了22.76%的燃油量。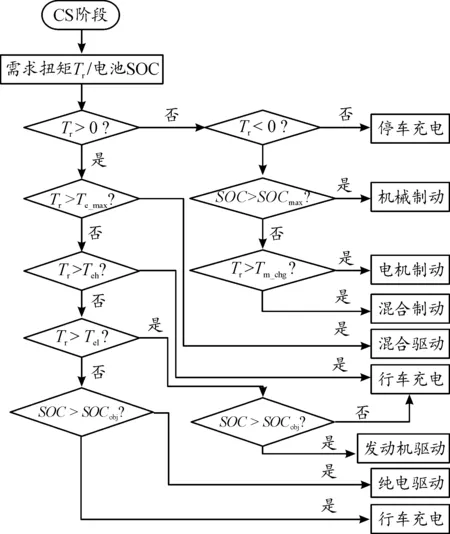
3 建模与仿真分析
3.1 发动机特性模型

3.2 驱动电机特性模型

3.3 动力电池组模型
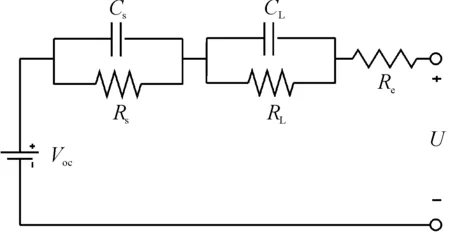
3.4 整车动力学模型

3.5 仿真结果分析



4 结论
猜你喜欢
军事文摘(2022年16期)2022-08-24
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年2期)2022-02-21
汽车电器(2021年6期)2021-07-05
汽车零部件(2021年2期)2021-03-05
宇航计测技术(2020年4期)2020-09-10
客户世界(2013年5期)2013-08-05
