
一种电动汽车驱动扭矩控制系统及控制方法研究
2021-07-05 05:32杨志超呼豆豆杨维刚
汽车电器 2021年6期
杨志超,呼豆豆,杨维刚,马 强
(大运汽车股份有限公司技术中心,山西 运城 044000)
电驱化是新能源汽车的重要发展方向。近年来,纯电动汽车、燃料电池汽车、混合动力汽车都在快速并行发展。整车动力性和驾乘感是新能源汽车技术发展的重点之一,怎样在保证整车动力性和可靠性的前提下,提升动力输出平稳性和动力传动系统的工作效率及寿命是整车电驱化控制技术的重要环节。
目前应用的扭矩控制策略中,在输入信号采集过程中数据密集,增加了控制器处理的负担,影响了运算速率;在扭矩输出控制时,因驾驶员踩加速踏板异常操作时(猛踩猛放)会出现扭矩突变的情况;在设计时没有考虑最大扭矩限制,可能会出现传动系统中的某个部件容易断裂等故障。为解决以上问题,特提出一种电动汽车驱动扭矩控制系统及控制方法。
驱动扭矩控制的作用是在车辆正常运行时,VCU接收加速踏板位置信号(加速踏板APS1信号、加速踏板APS2信号)、制动踏板信号(制动踏板传感器信号或脚制动开关)、挡位信号(N挡,D挡,R挡)、电机转速信号(MCU_Motor-Speed)来对驾驶意图进行解释,生成相关的扭矩需求,传输给MCU,将动力电池中的电能通过电机转化为车辆的动能。
1 电动汽车扭矩控制系统架构
实现扭矩控制需要一个完整的控制系统和精准完善的软件控制策略和算法,驱动扭矩控制系统包括挡位处理、油门踏板处理、制动踏板处理、系统最大能力、故障处理、驱动扭矩控制、扭矩仲裁和信号输出等软件控制模块。如图1所示。
2 驱动扭矩控制方法
该方法主要分为以下3步。
1)系统上电完成后,驱动扭矩控制模块接收逻辑挡位、加速踏板、制动踏板、电池BMS以及电机MCU等整车信号。
2)根据采集的信号进行驱动扭矩判断和计算,并将扭矩信号发送至扭矩仲裁模块;所述扭矩仲裁模块对接收的扭矩信号进行滤波计算,输出仲裁后的扭矩请求信号。
3)判断点火钥匙是否关闭IG OFF,如果否,返回步骤2);如果是,MCU根据接收的扭矩请求信号输出0扭矩。
2.1 信号采集
整车扭矩控制需要根据驾驶员的意图和整车当前的状态来进行。怎样识别驾驶员的意图或整车当前状态呢?驱动控制模块需从整车各操纵器和其他相关的控制模块采集相关信号。
整车上电完成后,驱动扭矩控制模块分别接收逻辑挡位信号、加速踏板信号和制动踏板信号,得知驾驶员的驾驶意图。从BMS输出的电池SOC值、电池组总电压、故障状态信号以及电池组当前最大允许回馈电流、系统最大能力模块输出的电机当前状态下的驱动扭矩TMCU、电池当前状态下能够输出功率转换的驱动扭矩TBMS、传动系统最大承受扭矩T以及故障处理模块输出的故障限值T判断整车的当前状态。结合以上采集的各模块发送的信号,为下一阶段的扭矩控制提供判断的依据。
2.2 信号处理与输出
扭矩控制模块收到其他模块发送的相关信号,经过对各类信号判断处理,来识别整车当前的状态和驾驶员的驾驶意图,再计算出相应的扭矩系数,最终保证满足动力性需求的扭矩平稳输出。
1)电机旋转方向控制
扭矩控制模块根据挡位处理模块输出的逻辑挡位信号和当前的车辆状态,控制电机的旋转方向。当扭矩控制模块收到逻辑挡位为D挡时,对外输出正扭矩请求;当扭矩控制模块收到逻辑挡位为R挡时,对外输出负扭矩请求;当扭矩控制模块收到逻辑挡位为N挡时,对外输出0扭矩请求。
注:当不处于能量回馈状态时。
2)驱动扭矩控制功能逻辑
加速扭矩计算公式:
系统最大驱动能力扭矩是指当前状态下,整车系统能够承受的最大驱动扭矩,主要评估以下要素:系统能力估计驱动扭矩T=min(TMCU,TBMS,T传动系统,T故障限值)。①TMCU:电机当前状态下能够产生的驱动扭矩,可根据电机外特性标定:TMCU=T电机限制。
②TBMS:电池当前状态下能够承受的驱动扭矩,该扭矩根据BMS实时反馈的电池组当前最大放电功率及当前转速计算得出:Ppack=电池组当前最大允许放电电流×电池组总电压,TBMS=Ppack×9550/n。
③T传动系统:传动系统最大承受正向的扭矩,该扭矩根据传动系统的结构决定(非回馈状态下)。
④T故障限值:T故障限值=T(MCU最大功率)×故障限值系数
故障限值系数由故障处理模块提供,此处不再叙述。
所述系统最大能力模块用于限制系统最大驱动能力扭矩,即:系统最大驱动能力扭矩的值取整个传动系统中抗扭性最小的零部件抗扭力矩。
3)加速扭矩系数
扭矩控制模块根据公式y=a×x2+b×x得出扭矩系数,其中x为加速踏板开度,取值范围为[0,1],a,b的取值是通过在不同车速下踩下加速踏板评价车辆的加速度,当其满足主观评价的要求后确认的值。在不同挡位及驱动模式下对应不同的扭矩系数MAP。
其中踏板开度由加速踏板位置信号(加速踏板APS2信号、加速踏板APS1信号)计算得出;车速由车速计算模块得出。(MCU_MotorSpeed×2πr×60)/(1000×减速比)。表1为驱动扭矩系数表。
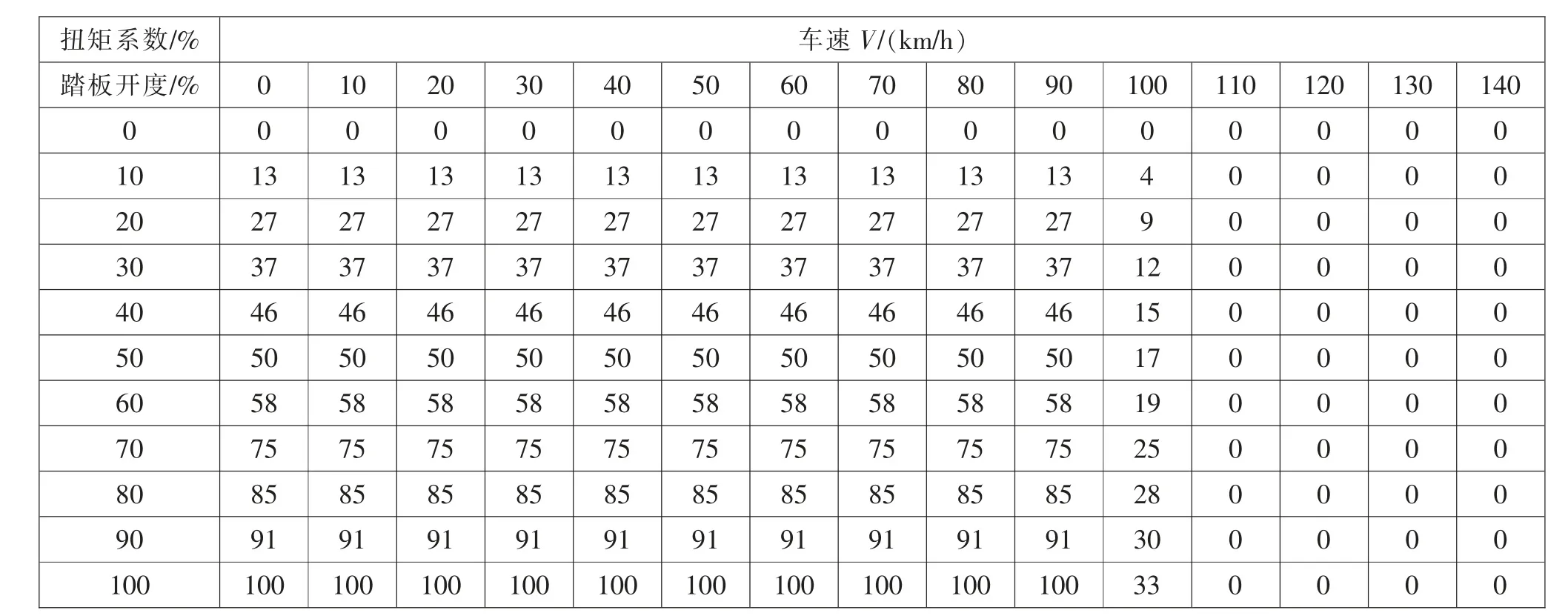
表1 驱动扭矩系数表(示例)
4)制动优先
制动功能是整车的安全功能,为保证整车安全和驾驶员的生命安全,在制动的过程,整车的扭矩控制至关重要。
在驱动扭矩解析过程中,扭矩控制模块测到制动踏板处理模块发送的制动信号,应将加速扭矩需求置为0(此处不包含制动回馈扭矩控制)。
部分车型在设计时扭矩控制也会产生手制动信号,为防止驾驶员在未松手制动的情况下加速行车,导致手制动片或制动片烧蚀的问题,当手制动信号有效时,扭矩控制模块将扭矩最大限制值按扭矩平滑控制线性降至20%(将最大值按照20%的值进行线性限值),并通过组合仪表向驾驶员报警。
5)信号滤波及扭矩平滑控制功能
通过控制策略防止数据输出发生突变,保证扭矩输出平稳。扭矩控制模块将计算得出的扭矩输出给扭矩仲裁模块,为保证扭矩输出安全,扭矩仲裁模块在扭矩变化时会滤波,采用逐次滤波,算法如下。
首次采集10个数x1,x2…x10,求平均值A1,下一时刻采集x11,若|x11-A1|>标定量限值时,x11丢弃,若|x11-A1|<=标定量限值时,保留x2,x3…x11,求取A2…,标定量限值的大小得根据实车的效果进行调整,并对接收的扭矩信号进行扭矩平滑控制,具体下式表示:

式中:K——常数;Ta——目标输出扭矩值;Δt——系统采样时间,一般可以是10ms或100ms;ΔT——扭矩需求值减去上一时刻扭矩输出值。
增加扭矩平滑控制,对需求扭矩进行转矩增加率限制,防止敲齿Clunk现象发生,避免产生不良乘坐感受和降低传动系统寿命。表2为扭矩变化率限值。图2为扭矩变化率。

表2 扭矩变化率限值(示例)
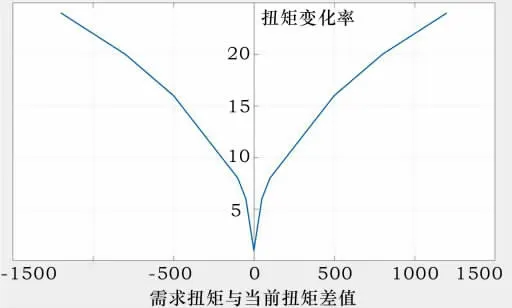
图2 扭矩变化率(示例)
6)最高车速限制
基于安全考虑,往往需要对车辆行驶速度进行限制。当车辆处于高速行驶时,驱动电机亦处于高速运转状态。假设车辆处于一个长下坡的路况时,若此时驾驶员未松开加速踏板或未采取任何制动措施,车辆会持续加速,导致电机存在超速甚至失控的风险。
因此,在车速控制策略中限制车辆实际运行的最高车速尤为重要。最高车速的数值需要主机厂人员综合车辆行驶道路、行驶时的气候条件以及车辆载荷等因素进行测试及标定。车辆往往不允许超过标定的最高车速行驶。
本策略采集制动防抱死系统实时车速信号及电机传动轴输出转速信号,判断当前车速是否大于设定最高车速阈值,当车速超过设定值,限制扭矩输出,使车速下降到安全范围内。而最高车速限值需要根据不同挡位进行设置,D挡最高车速限速为100km/h(假设值),当车速在超过90km/h时,通过增量式PI调节,使车速不再增加,若调节车速时目标输出负扭矩,则将目标输出扭矩置为0。R挡最高车速限值为10km/h(假设值),控制策略同D挡。
2.3 IG电源消失
判断点火钥匙IG OFF,扭矩控制模块采集到的其他模块信号为0,将扭矩请求信号输出0扭矩。
3 结语
本文中的方法不仅通过限制系统最大驱动能力扭矩对传动系统中的各部件在机械冲击过程中进行保护,还采用制动优先、最高车速限制等控制策略保证整车行车安全。在数据信号处理及扭矩输出方面采用减少软件处理过程中的数据查询,提高运算速率。通过滤波和对需求扭矩转矩增加率的限制,防止数据输出发生突变,保证扭矩输出的平滑性,形成一套扭矩控制系统控制方法。但后续还需要经过长时间在市场的各种运行工况实验验证,不断优化控制方案和技术参数,才能使控制方案更加完善,整车运行更加安全可靠。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
青少年科技博览(中学版)(2022年1期)2022-03-28
机电工程技术(2021年3期)2021-09-10
汽车实用技术(2021年12期)2021-07-03
科技与创新(2017年5期)2017-03-28
山东工业技术(2017年4期)2017-03-28
投资北京(2017年1期)2017-02-13
发明与创新·大科技(2016年10期)2016-10-22
民生周刊(2016年7期)2016-04-15
试题与研究·中考物理(2014年3期)2015-05-11
