
基于长波平顺性的提速线路精捣方案优化算法及应用
2022-04-01 03:39张雨潇陈云峰何越磊
铁道学报 2022年2期
时 瑾,张雨潇,陈云峰,何越磊
(1.北京交通大学 土木建筑工程学院, 北京 100044;2.中国铁路兰州局集团有限公司 工务部,甘肃 兰州 730000;3.上海工程技术大学 城市轨道交通学院, 上海 201620)
既有线提速改造开行动车组是落实全路“三保三增”攻坚战的重要举措。既有线经过多年运营,线路位置已经发生较大变化,由于受接触网、轨旁设备等影响,大机捣固已无法恢复到原设计线位。此外,随着开行160 km/h及以上动车组,轨道长波平顺性对行车性能的影响越来越显著,而现行大机捣固作业过程还不能充分控制线路长波平顺性,难以充分发挥工务养护维修对线路质量的提升作用。为解决上述问题,需开展基于长波平顺性的线路优化及精捣方案研究,以指导现场作业。
诸多学者对线路优化及精捣精调控制开展了大量研究。其中,无砟轨道精调通常采用轨道测量仪采集轨道数据,再通过扣件系统进行调整,使轨道几何形位达到规范要求[1]。针对无砟轨道轨向、高低不平顺计算方法使用不便的问题,全顺喜等[2]提出偏差模型将矢距差转化为偏差关系,简化了轨道不平顺计算过程。李阳腾龙等[3]提出高密度四点偏差约束的轨向、高低控制模型,可对中长波任意位置的轨向、高低进行质量评价并指导轨道调整。李再帏等[4]利用轨道不平顺变化率法去除数据异常值,采用EMD高通滤波去除轨道不平顺中低频趋势项,通过轨检数据预处理提高养护维修效率和管理水平。刘学文等[5]提出用静态精测数据反演动态检测数据,利用动静态通用的评价标准评估精调效果,促进精调作业快速优质完成。有砟轨道的整正方式与无砟轨道大相径庭,我国既有线有砟轨道常依据渐伸线法指导大机完成捣固作业,但应用该方法进行长距离整正容易引起曲线钢轨鹅头和反弯。为此,魏晖等[6]提出以轨道检查仪为核心的相对测量调轨技术,该技术作业效率高,而且能够制定不同波长平顺性的调整方案。文献[7-8]提出“先重构,后整正”的既有铁路轨道线形及捣固方案优化技术,根据绝对测量数据计算轨道线形参数,在此基础上制定调整方案。
目前对无砟轨道精调方法的研究已日趋成熟,现有线路优化及精调控制模型往往以新建高速铁路无砟轨道验收标准为优化目标,缺乏对既有铁路有砟轨道养护维修作业适用性的考虑。而传统的既有线养护维修措施,由于缺乏精确捣固数据支持,仅调整和恢复轨道几何形位的相对状况,长波不平顺控制及线形几何参数的恢复都达不到理想效果。
因此,本文对既有提速线路轨道不平顺波长对行车性能影响进行分析,探讨检测弦长和管理幅值,研究基于长波平顺性的起拨量优化算法,结合敦煌铁路某提速改造区段验证算法实施效果,为既有线精捣控制提供参考。
1 波长影响理论分析
轨道随机不平顺波长范围较广,根据波长分为短波不平顺、中波不平顺和长波不平顺。随着列车运行速度提高,以往对列车轮轨动力作用影响不明显的长波不平顺逐渐成为影响列车运行安全性、平稳性和舒适性的主要因素[9]。因此,必须加强对长波不平顺的控制和管理。
1.1 波长对行车性能影响分析
TG/GW 102—2019《普速铁路线路修理规则》[10]中明确指出线路轨道静态轨向、高低不平顺检测弦长为10 m,轨道动态轨向、高低不平顺检测弦长分别为1.5~42 m和1.5~70 m。TG/GW 116—2013《高速铁路有砟轨道线路维修规则(试行)》[11]中规定轨道静态轨向、高低不平顺检测弦长为10、30、300 m。根据文献[9],在250~400 km/h行车速度域,对应列车自振频率的敏感波长范围为40~120 m。文献[12]建议,300~350 km/h高速铁路无砟轨道采用70~150 m带通滤波不平顺的方式评价长波平顺性。参考我国工务部门养护维修作业习惯,并综合众多研究成果和铁路管理标准,初步确定以70 m为既有提速线路的轨向、高低不平顺检测弦长。
轨道不平顺测量值与实际值之间的传递函数为
(1)
式中:H(λ)为传递函数;l为弦长,m;λ为波长,m。
采用70 m弦对轨道进行测量,并按式(1)计算不同波长对应的传递函数,计算结果见图1。由图1可知,70 m弦有效控制的波长范围为40~140 m。

图1 波长变化下70 m弦长对应的传递函数
为验证70 m弦对提速线路轨道不平顺的控制效果,利用动力学分析研究波长对行车性能影响。建立某CRH动车组车辆-轨道耦合动力学模型,由轮对、轴箱转臂、构架和车体多个刚体组成,通过一、二系悬挂连接,该模型共具有50个自由度。车轮踏面为S1002 G,钢轨廓形采用60 kg标准轨,轮轨接触力采用Kalker简化滚动接触理论计算轮轨蠕滑力和蠕滑力矩,具体采用FASTSIM算法计算轮轨作用力。行车速度考虑80、120、160 km/h三种情况。轨道不平顺为连续余弦波,波长考虑5、10、20 m等情况,波长5 m幅值0.5 mm,波长10 m幅值1 mm,波长20 m幅值2 mm,幅值以1/10 000的变化率随波长逐渐增大。
不同行车速度下轨道不平顺波长与行车性能的关系见图2。由图2可知,速度为80 km/h时,不平顺敏感波长在30 m左右;速度为120 km/h时,不平顺敏感波长扩大到35~45 m;速度提高至160 km/h后,不平顺敏感波长增大至45~55 m。由计算结果可以发现,目标速度160 km/h对应的轨道不平顺敏感波长处于70 m弦有效控制范围内,因此确定提速线路的轨道不平顺检测弦长为70 m。

图2 轨道不平顺波长变化对行车性能影响
1.2 长波平顺性弦长控制指标
国内外众多铁路部门对轨道平顺性的幅值管理标准进行过大量研究。TG/GW 116—2013《高速铁路有砟轨道线路维修规则(试行)》[11]中明确指出10 m弦短波平顺性控制标准为2 mm;TG/GW 102—2019《普速铁路线路修理规则》[10]中指出轨道静态几何不平顺10 m弦短波平顺性控制标准为4 mm,轨道动态几何不平顺1.5~70 m波长平顺性控制标准为6 mm。文献[13]指出,为保证动车组以160 km/h的速度安全运行,轨向不平顺10 m弦测值不可超过7 mm,高低不平顺10 m弦测值不可超过9 mm。
国外不平顺弦长管理标准并不统一,日本新干线采用40 m弦7 mm控制,法国高速铁路采用31/33 m弦10 mm控制,美国管理安全标准采用37.8 m弦25 mm控制。未单独对70 m弦长波平顺性控制标准进行明确规定。
为确定提速线路轨向、高低长波不平顺控制标准,对长波不平顺激励下的车体动力响应进行仿真计算。轨道不平顺采用实测不平顺与70 m波长余弦波叠加后形成的激励,余弦波不平顺初始幅值为15 mm,并以5 mm的幅度逐渐递增至70 mm,不平顺幅值与车体加速度之间对应关系见图3,由图3可知,车体垂向加速度、横向加速度随着不平顺幅值增加而不断增大,根据铁运〔2006〕146号《铁路线路修理规则》[14]对车体加速度动态质量评价等级的划定标准,将车体加速度的线性回归值与划定标准进行对比,可得到不同质量等级下70 m弦不平顺管理值,其中:高低管理值的Ⅰ级标准为23 mm、Ⅱ级标准为41 mm、Ⅲ级标准为58 mm;轨向管理值的Ⅰ级标准为18 mm、Ⅱ级标准为38 mm、Ⅲ级标准为63 mm。

图3 车体加速度与不平顺幅值对应关系
由文献[15]对既有线提速后轨道动力特性分析结果可知,既有线轨道实际位置大幅偏离原始设计位置,轨道几何形位较差,不利于提速改造后线路平顺性状态的保持。因此,结合仿真计算得到的长波不平顺管理值,确定以10 mm作为既有线提速改造作业的轨向、高低平顺性控制目标值。该不平顺幅值控制条件较为严格,足以将长波不平顺对行车动力性能的影响降至最小,保证提速列车安全、平稳和舒适地运行。
2 既有线精捣调整量优化方法
碎石道床为散体结构,整体性欠佳,有砟轨道设备的记忆性及维修天窗资源的有限性增加了运营阶段养护维修作业的困难性[16]。既有线的桩点坐标、圆曲线半径、缓和曲线长度等设计参数因多年运营发生了较大变化,难以依据原有设计线位置对线路进行调整。因此,需要准确识别实际线路参数,提高精捣效果,在满足轨道平顺性要求的基础上,以最小的代价进行精捣控制。
2.1 线路线形拟合
2.1.1 轨检数据精确测量
对于两侧已经布设好控制网的线路,采用“相对+绝对”的复合测量模式[17],依托断面仪+惯导的快速轨道测量系统进行轨道几何形位数据精确测量,其中,断面仪通过测量线路两侧控制网得到端点绝对坐标,高精度惯导单元通过硬件结构和各项传感器,得到以设备坐标为基准的姿态测量数据,系统将姿态数据与绝对坐标进行数据融合,生成以铁路轨道施工坐标系为基准的位置数据,即线路上各测点的绝对位置坐标,为准确高效地评价轨道几何质量、调整轨道形位提供了数据基础。
2.1.2 线形优化重构
线路平纵断面由多种基本线形组成,拟合得到最优设计线的关键在于准确判断各实测轨道点所属的线路线形,基于轨道精测数据计算线路平纵断面的定长弦斜率二阶导数,依据其变化规律初步判断分段位置,迭代计算分段点坐标,细化识别实测轨道离散点对应的线路属性。以线路分段结果为依据,利用正交最小二乘算法建立线形拟合优化模型,得到与线路实际位置基本吻合的新设计线,重新计算平纵断面设计参数及桩点坐标,完成平纵断面线形重构。
2.2 基于长波不平顺的线路起拨量优化
2.2.1 长波不平顺控制模型
模型根据轨道平顺性情况计算起拨量,采用中点矢距法计算轨向、高低不平顺,以70 m弦长10 mm矢高为轨道平顺性控制标准,并依据单次可调量范围对拟调整量进行约束。将不同控制条件进行整合,通过最优化算法进行求解,得到既满足约束条件又保证调整量之和最小的轨道最优调整量。
设待调整点的间距为1 m,调整后剩余偏差H′(i)为
H′(i)=H(i)+t(i)
(2)
式中:i为待调整点编号;t(i) 为各点的拟调整量统称;H(i) 为平纵断面偏差。
单次调整量限值约束,即
αi≤t(i)≤βi
(3)
式中:αi、βi分别为调整点单次可调量的下限和上限。
70 m弦长波的高低和轨向的平顺性约束为
(4)
式中:E、F分别为70 m弦的起终点位置;im为EF弦中点位置;μ为轨向、高低平顺性阈值。
以弦长EF为基本单元,按照轨道待调整点里程顺序逐点移动EF弦端点,并依次求解各个基本单元内对应的调整量。随着移动弦遍历所有待调整点,使各点对应的调整后轨向、高低平顺性均满足约束要求,检测过程见图4。
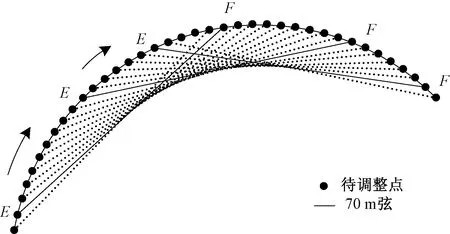
图4 70 m弦逐点移动示意
2.2.2 模型求解
在满足调整量限值和70 m长波平顺性的前提下,为了得到最小的整体调整量,需建立拟调整量目标函数为
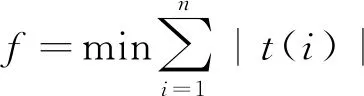
(5)
式中:f为拟调整量目标函数;n为70 m弦包含的检测点个数。
可利用非线性规划对式(1)进行求解。将t(i)代入式(3)得到轨道点单次调整量限值约束为
(6)
将式(6)转化为矩阵不等式组为
B6×nXn×1≤b6×1
(7)
式中:Xn×1为调整量矩阵;b6×1为调整量对应的单次调整量限值约束矩阵;B6×n为调整量对应的单次调整量限值系数矩阵,即
(8)
(9)
(10)
将调整量t(i)带入式(4)得70 m弦平顺性约束,可得
(11)
将式(11)转化为矩阵不等式组,即
C2×nXn×1≤c2×1
(12)
式中:c2×1为调整量对应的70 m弦平顺性约束矩阵;C2×n为调整量对应的70 m弦平顺性系数矩阵,即
(14)
(15)
综合式(7),式(12)两项约束不等式,得到长波不平顺控制模型约束不等式组为
A8×nXn×1≤a8×1
(16)
(17)
(18)
(19)
式中:A8×n为调整量对应系数矩阵;a8×1为调整量对应的约束矩阵。
依据上述模型求解的结果t(i)即为待调整点的拟调整量。在待调整区段内逐点移动70 m检测弦,依次计算各检测弦对应的拟调整量,由此实现对轨道线形的调整与状态评价。
3 精捣控制工程应用
3.1 工程概况
敦煌铁路于2006年建成通车,2015年完成铁路电气化改造,列车运行速度为120 km/h。由于既有敦煌铁路建设标准低,无法满足动车160 km/h开行条件,需进行提速改造。本次是对敦煌线双塔站至敦煌站155 km线路进行提速改造施工。
本研究以敦煌铁路K63+300—K69+300区段为例,根据台账数据,该区段K64+932—K65+550为平曲线,全长618 m,其中圆曲线半径8 000 m,缓和曲线长70 m,设计超高15 mm;纵断面出现4个变坡点,其中K63+400、K65+800因坡度差小于3‰未设置竖曲线,K63+810、K69+110为凹曲线,半径15 000 m。根据轨检数据,该区段轨向、高低平顺性较差,轨道几何形位扣分严重,多次出现晃车现象,难以满足提速列车开行条件。
为改善该段铁路运行状态,工务部门依据现场工程条件,提出以下要求进行精捣作业:轨道单次调整量不超过38 mm;线路纵断面调整不进行落道;调整后轨道平纵断面70 m弦矢高不超过10 mm;调整后轨道200 m单元区段轨道质量指数(TQI)不超过3.4。
3.2 精捣优化方案
3.2.1 线形拟合结果分析
依据2.1节中介绍的线形优化重构方法对敦煌铁路K63+300—K69+300区段进行分段拟合,由拟合结果可得到优化后设计参数及桩点坐标。参照拟合结果编制设计线参数表,其中平曲线参数见表1,纵断面参数见表2。由表1和表2可知,平曲线长度变化10.96 m,曲线半径、缓和曲线长具有小幅度变化,总体上看,拟合设计线的设计参数与原始台账在合理变化范围内基本一致,符合现场观测情况,真实反映了轨道几何状态的实际情况。
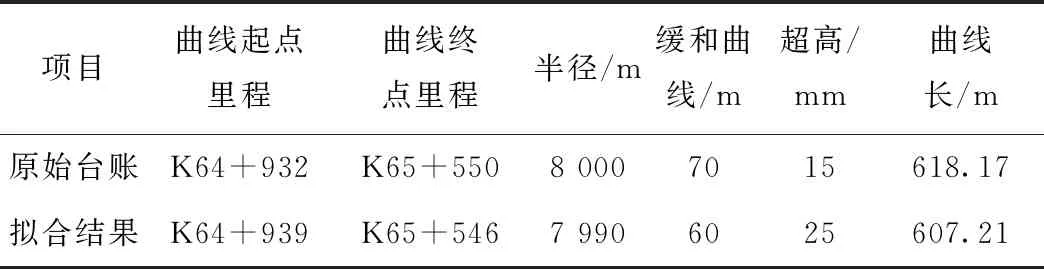
表1 曲线表
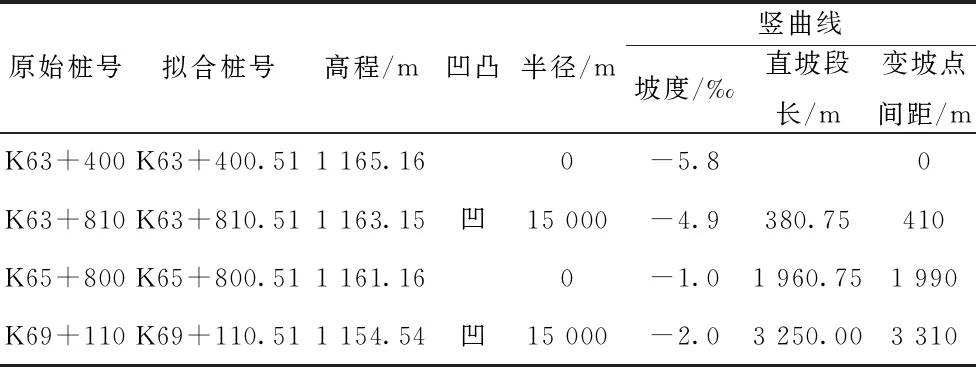
表2 坡度表
3.2.2 基于长波平顺性的调整量分析
根据拟合设计线,可计算得到实测线路平纵断面偏差,其中部分区段偏差高达100 mm,若以新设计线位置为调整目标,则起拨量均超过单次调整限值要求,而且纵断面会出现落道情况。因此,需要在新设计线基础上整正轨道几何形位,使其满足平顺性要求。依据2.2节长波不平顺控制模型计算得到的平纵断面精捣起拨量,见图5。由图5可知,拨道量幅值25.73 mm,起道量幅值34.06 mm,均未超过38 mm的单次调整量限值要求。

图5 精捣起拨量
将起拨量绝对值划分为三个区间,对其分布情况进行了统计,统计结果见图6。由图6可知,轨向不平顺调整量较小,小于10 mm的线路占71.99%,即满足70 m弦长波平顺性的基础上减弱对轨道结构的扰动,保证轨道几何线形的平顺性。针对部分高低平顺性较差区段,给予较大调整量,起道量15~25 mm的线路占49.71%,起道量≥25 mm的线路占14.57%。

图6 调整量统计图
目前,轨道模拟整正通常依靠轨道静态测量设备配套的内业软件进行,以线路偏差为基础,以调整量限制范围为约束,根据现场情况优化线形,并取优化线形与设计位置的差值为捣固调整量。利用传统优化方法得到的起拨量基本满足单次调整限值要求,在一定程度上可以减弱线路的波动情况,但难以控制轨道长波平顺性,操作过程依赖技术人员的设计经验,容易造成优化结果不满足平顺性需求,制约线路捣固效果。为了探究传统优化方法和本文提出的长波平顺性优化方法之间的异同,将两种方法制定的调整方案进行对比分析,从线路平顺性和列车运行安全性、舒适性角度全面分析不同调整方案提供的优化效果。
依据传统优化方法和长波平顺性优化方法调整后的平纵断面剩余偏差见图7。由图7可知,传统方法制定精捣方案过程中,为了使调整量满足限值要求,目标线形与原始线形走势相似,线路整体上弯折较多,长波平顺性难以改善;由长波不平顺控制模型计算得到的优化线形相比传统方法更加平顺,线形的抖动现象明显得到改善,提高了长波平顺性的同时也能保证调整量满足单次调整限值要求。
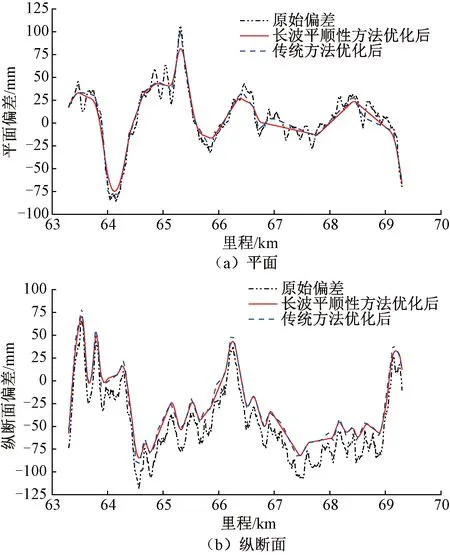
图7 平纵断面偏差
基于不同方法的优化结果分析轨道长波平顺性,平纵断面70 m弦矢高分析结果见图8。由图8可知,利用长波不平顺控制模型优化后,平面线形70 m弦矢高幅值可由15.36 mm降至3.63 mm以下,纵断面线形70 m弦矢高幅值由21.80 mm降至10.48 mm以下,优化后线形矢高相比优化前降低了50%~80%;利用传统方法优化后,矢高虽然全线减小,但个别位置轨向不平顺达到16.55 mm,高低不平顺达到18.79 mm,远远超出轨道平顺性管理标准,显然传统优化方法难以有效控制长波不平顺。
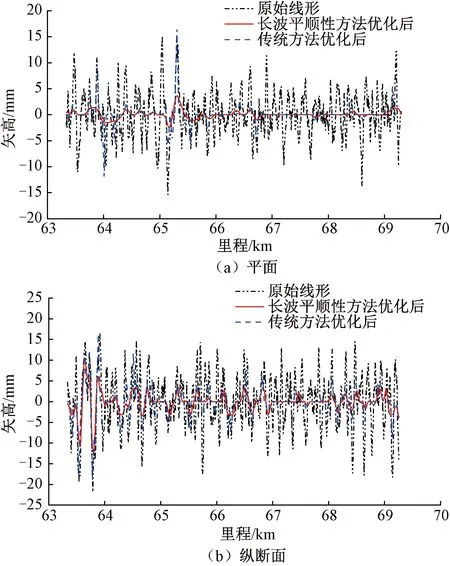
图8 平纵断面70 m弦矢高
对采用不同优化方法调整的平纵断面线形进行频谱分析,优化前后线形功率谱密度见图9。由图9可知,两种方法优化后的剩余偏差相对于原始偏差在各个波长频段均有所改善,长波平顺性优化方法相比传统方法在100 m波长范围内振幅变化更为平缓。

图9 优化前后线形功率谱密度
对不同优化方法得到的线形进行行车安全性评估,仿真车速160 km/h,脱轨系数和轮重减载率的仿真结果见图10。由图10可知,线形经过长波平顺性方法优化后,脱轨系数与轮重减载率整体趋近于零,幅值显著降低,行车安全性指标较优。
对不同优化方法得到的线形进行行车舒适性分析,仿真车速160 km/h,车体垂向加速度和车体横向加速度的仿真结果见图11。由图11可知,长波平顺性方法优化后,车体垂向加速度与车体横向加速度整体趋近于零,幅值显著降低,行车舒适性较优。

图11 车体振动加速度仿真结果
3.3 精捣应用效果分析
根据3.2节的分析结果可知,长波平顺性优化方法相比传统优化方法在线形、矢高、行车安全性、行车舒适性等多方面均具有显著优势。因此,该段线路依据上一节的长波平顺性优化方案进行作业,大机ALC系统将起拨道数据直接导入,按照每枕数据完成线路精捣作业。
精捣作业前后的平纵断面偏差见图12。由图12可见,捣后剩余偏差相比捣前更加平顺,整体抖动现象明显得到改善。平面偏差由左右大幅度摆动逐渐向中心设计线靠拢,偏差波动幅度的减弱可有效改善轨道的轨向不平顺;纵断面偏差整体增大,轨道逐渐抬高至设计线,同时高低波幅显著降低,轨道高低起伏状况得到有效控制,显著提高了线形的长波平顺性。
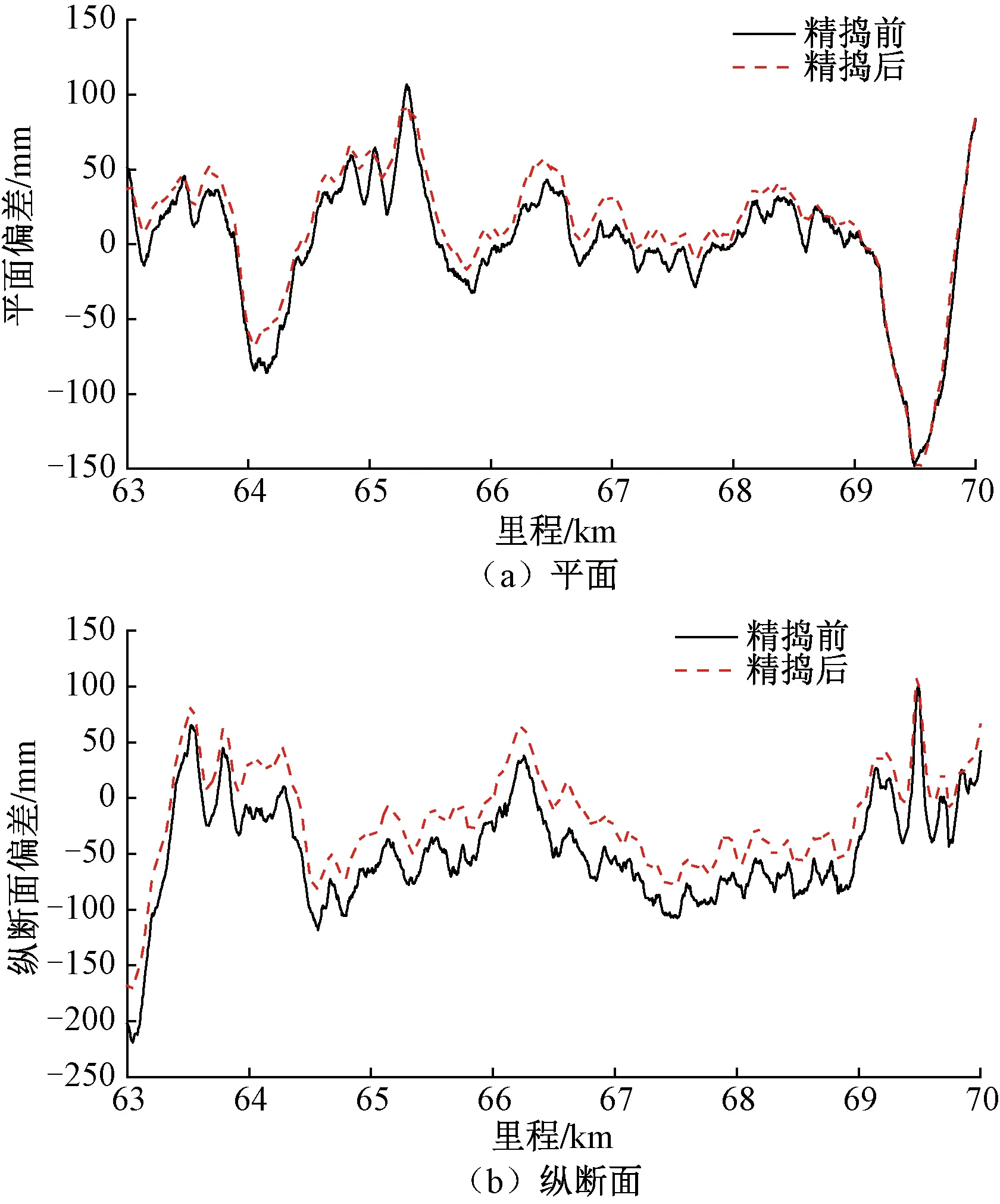
图12 精捣前后线形变化
为了进一步分析轨道长波平顺性的改善效果,计算平纵断面剩余偏差的70 m弦矢高,并将精捣前后的计算结果进行对比,对比结果见图13(a)、图13(b)。由图13(a)、图13(b)可见,精捣调整后,轨向70 m弦矢高幅值由15.36 mm降至9.8 mm以下,高低70 m弦矢高幅值由21.80 mm降至14.65 mm以下,降低了30%~40%。
为了观察精捣前后长波不平顺在不同范围内的变化情况,根据平顺性要求将70 m弦矢高绝对值划分为四个区间,分别为0~4 mm、4~8 mm、8~10 mm以及大于10 mm,精捣前后70 m弦矢高在各区间内的分布情况见图13(c)。由图13(c)可知,捣固作业后轨向不平顺0~4 mm数量由捣前的789个增至1 030个,高低不平顺0~4 mm数量由捣前的579个增至801个;轨向不平顺4~10 mm数量由355个降至152个,高低不平顺4~10 mm数量由462个降至351个;轨向不平顺全部降至10 mm以下;高低不平顺大于10 mm的检测点个数由144降至67。全线经过精捣,长波不平顺得到明显改善,基本满足了工务部门对该段线路精捣后70 m弦矢高小于10 mm的平顺性要求。
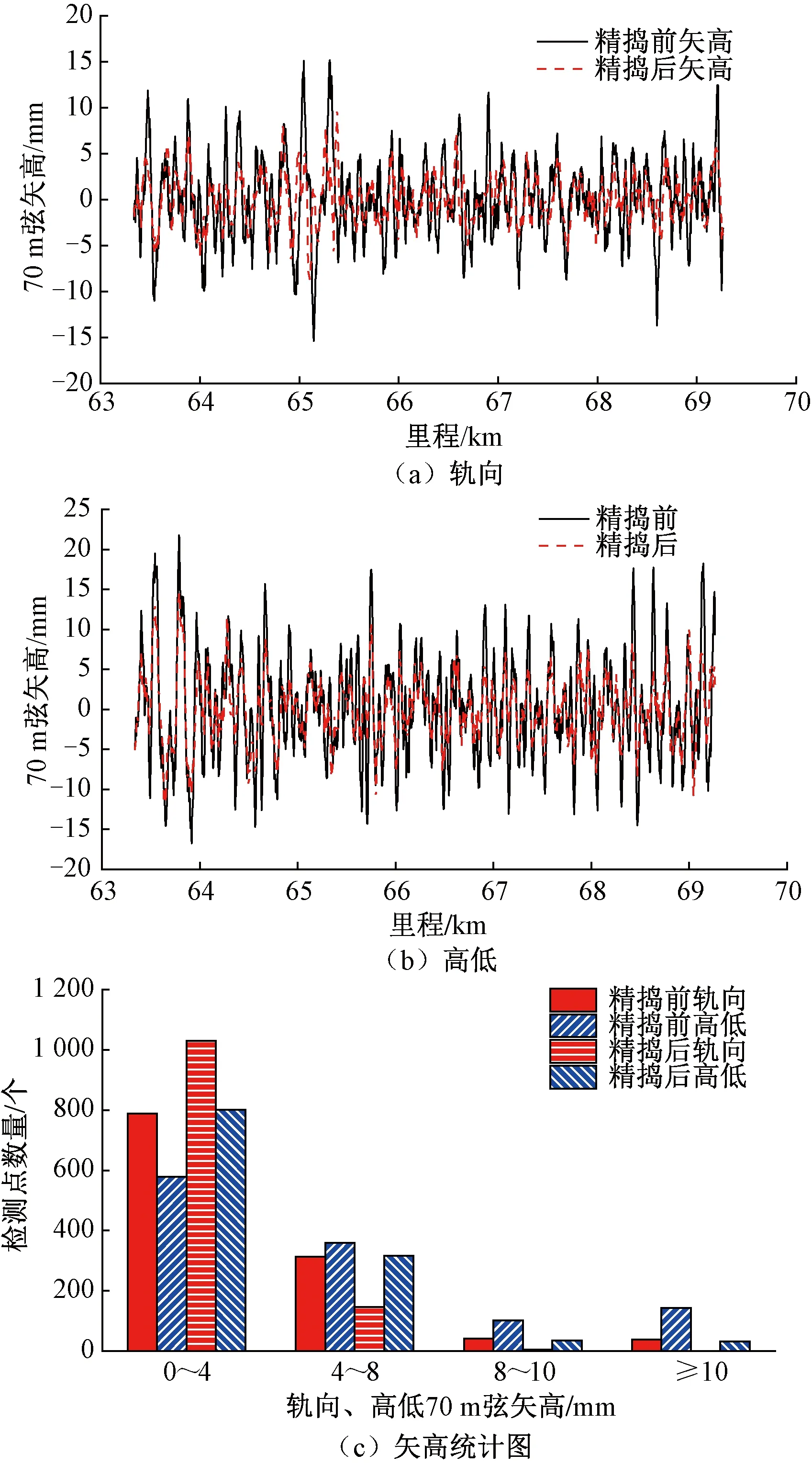
图13 精捣前后70 m弦矢高对比
依据工务部门制定的轨道平顺性要求,将轨道精捣前后的TQI值划分为四个区间,分别为0~2.8、2.8~3.4、3.4~5.0以及大于5.0。根据轨检车和轨检小车的检测数据,将该段线路分为了32个200 m区段,并将线路各区段的TQI分布情况统计见表3。由表3可知,不同分布区间内的区段个数均出现了明显降低,根据轨检小车数据,由精捣前28个区段TQI值大于5.0,降至精捣后26个区段TQI值小于3.4;根据轨检车数据,由精捣前全部区段的TQI大于5.0降至精捣后全部小于3.4,而且其中14个区段TQI值小于2.8,满足了工务部门对该段线路TQI小于3.4的平顺性要求。

表3 精捣前后TQI分布情况
4 结论
本文分析了波长对行车性能影响关系和弦长控制标准,提出了基于长波平顺性的精捣调整量优化算法,结合现场工程验证了实施效果,主要结论如下:
(1)采用70 m检测弦长、10 mm管理幅值作为既有线提速改造作业的轨向、高低平顺性控制目标值,将长波不平顺对行车动力性能的影响降至最小,保证既有线满足开行160 km/h动车组条件。
(2)结合非线性规划理论提出了满足长波平顺性控制标准的优化算法,该算法以工程作业需求和设计标准为约束,通过逐点移动70 m弦实现全线精捣方案起拨量优化,可保证既有线长波平顺性满足要求。
(3)敦煌铁路提速改造精捣效果表明,采用优化算法可使轨向和高低70 m弦矢高相比精捣前降低了30%~40%,全线动检TQI达到3.4以下,精捣优化方案改善效果显著。
猜你喜欢
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
铁道建筑技术(2020年11期)2020-05-22
世界家苑(2018年4期)2018-05-21
中国新技术新产品(2017年24期)2017-11-30
数字技术与应用(2017年8期)2017-10-30
红旗文稿(2016年7期)2016-05-13
海军航空大学学报(2015年1期)2015-11-11
建材发展导向(2014年5期)2014-10-20
科技致富向导(2013年18期)2013-10-31
