高功率密度混合动力动车组牵引变流器研究
2022-04-01 03:39:36沈来来刘志刚
铁道学报 2022年2期
沈来来,陈 杰,况 阳,韩 伟,刘志刚
(1.北京交通大学 电气工程学院, 北京 100044;2.中车长春轨道客车股份有限公司,吉林 长春 130113)
在城市轨道交通领域,为回收制动能量,或实现应急牵引,一些线路的地铁配备了车载能量存储装置,在提升了牵引网稳定性的同时也保证了列车的机动能力[1],但是,该装置在高速列车上还未展开深入研究。我国地域广阔,地形多变,有很多地区不易架设接触网;同时,高速铁路相比城市轨道,其接触网架设在户外,容易受大风、雨雪等自然现象的影响,造成接触网故障,不能正常工作,影响列车正常运行[2]。因此,具有能量储存装置的混合动力动车是应对该类问题的最佳解决方案。
混合动力系统的能量储存装置通常由动力电池和双向DC/DC变流器组成[3]。然而,该能量储存装置不仅提高了成本,而且降低了牵引变流器整体的功率密度。对动车组而言,双向DC/DC变流器仅在动力电池充放电时处于工作状态,在正常接触网模式下一般处于闲置状态,其利用率较低。高速列车在接触网供电时,单相四象限变流器(以下简称4QC)会产生二次脉动功率,一般采用无源LC谐振滤波器实现无源功率解耦,保证直流母线电压的稳定。但是,该无源LC谐振滤波器体积笨重且占用空间较大,同样降低了牵引变流器的功率密度[4]。本文基于混合动力动车组的运行工况,提出分时复用双向DC/DC变流器实现有源功率解耦,以取代传统高速列车上笨重的无源LC谐振滤波器,进而提升牵引变流器的整体功率密度。
选用Buck型双向DC/DC变流器(以下简称BDC)为动力电池充放电,该电路拓扑结构简单,其IGBT 为桥臂式结构,利于变流器系统集成。文献[5-8]均针对该变流器展开了有源功率解耦研究。文献[5]通过检测交流侧电压电流以及系统参数,计算得到二次脉动功率的幅值和大小,这种控制方式为开环控制,容易受参数影响。文献[6]将BDC应用于MMC领域,但涉及的算法复杂,且BDC仅用于有源功率解耦,其参数设计简单,限制条件少。文献[7]通过计算,使在每个开关周期内流入至BDC的电流与输入至直流侧的二次脉动电流相等,但是BDC一直工作在断续模式,能消除的二次脉动功率有限。文献[8]采用检测4QC输入至直流侧的二次脉动电流和直流电压计算二次脉动功率大小,需要额外电流传感器,不便于系统改造,且增加了成本。
二次脉动功率会对电机造成拍频现象,导致电机出现明显的转矩脉动。虽然无拍频控制能够抑制拍频现象,但是控制算法复杂,并且电机处于动态变化的过程,因此无拍频控制的抑制效果有限[4,9-10]。这也正是目前大多数型号的动车仍采用无源LC谐振滤波器的原因。相比较而言,动力电池在动车停站或者停库时通过接触网供电充电,此时电机静止,不会影响牵引性能,且电池充电过程稳定,对控制算法要求不高,通过简单的谐振控制就能抑制二次脉动对电池的影响[11],避免电池在满功率运行时发生过热现象。另外,电池也可以吸收电机再生制动的能量进行充电。动车组按运行图运行,因此针对具体的运行方案,通过制定合理的能量管理策略,能实时保持动力电池合适的荷电状态,满足动车组应急牵引以及在非电气化铁路段运行的要求[12]。
当通过接触网模式充电时,BDC将不再用于有源功率解耦,因此直流母线会存在明显的二次脉动电压。这个脉动电压将会对前端4QC的控制性能产生影响。文献[13-14]提出采用滤波器使得反馈至控制回路的直流电压不存在二次分量,由于仅在电压控制外环进行改进且实际直流电压二次脉动电压较大,因此即使控制器输出标准正弦变化的PWM波形,最终调制得到的实际PWM电压波形仍存在明显的低次谐波分量。另外,牵引网存在明显的三、五次电压谐波,也会导致4QC产生较为明显的电流谐波[15]。文献[16]提出采用N次陷波器和重复控制结合的方法达到抑制谐波的目的,但是控制实现复杂,较高的开关频率意味着带宽较高,限制了其在大功率低开关频率场合的应用。
针对混合动力动车组的运行特点,本文提出分时复用BDC,既能实现动力电池充放电,又能取代无源LC谐振滤波器实现有源功率解耦。分析有源功率解耦原理,并提出利用直流母线电压计算二次脉动功率,通过双闭环控制解耦电容的电压实现解耦功能;针对混合动力动车组的实际系统参数,进行解耦电路参数设计并分析分时复用的可行性;分析接触网充电下二次脉动电压及牵引网背景谐波对4QC的影响,提出基于d-q坐标轴下谐波抑制控制策略;通过实验验证了本文控制策略的有效性。
1 有源功率解耦
1.1 解耦原理
图1为有源功率解耦电路主拓扑,其前端为4QC,后级BDC可以用于实现在接触网牵引模式下有源功率解耦功能。

图1 有源功率解耦电路拓扑
4QC输入直流侧的功率pin为
pin=Vgsin(100πt)Igsin(100πt-φ)-
( 1 )
式中:Vg和Ig分别为交流侧电源的电压和电流幅值;φ为电压和电流的相位角;Lg为交流侧电感;ω为电网频率。牵引网交流电频率为50 Hz。
pin包含提供给负载的直流功率分量Pd和变化频率为100 Hz的二次脉动功率分量p2-ripple。
( 2 )
式( 2 )中
( 3 )
由式( 2 )和式( 3 )可知,该二次脉动功率的幅值P2-peak大于直流功率Pd,反映在直流母线产生的二次脉动电压将会导致牵引电机出现严重的拍频现象,不利于动车组安全稳定运行。因此,将针对混合动力动车组BDC展开有源功率解耦分析。
假设流经BDC滤波电感Lcs的电流ics为
ics=Icssin(200πt+β)
( 4 )
式中:Ics为ics的幅值。
解耦电容Ccs上的电压ucs可以表示为
( 5 )
式中:Ucs为解耦电容Ccs的直流偏置。
忽略开关纹波以及电路损耗,流经Lcs和Ccs串联支路的功率为
pcs=icsuin=IcsUcssin(200πt+β)+

( 6 )
式中:uin为Lcs和Ccs串联支路的电压。
令pcs中的二次脉动功率p2-ripple等于4QC输入至直流侧的二次脉动功率p2-ripple,即
IcsUcssin(200πt+β)=P2-peaksin(200πt+θ)
( 7 )
式( 6 )和式( 7 )表明,BDC能够实现解耦二次脉动功率,但会引入四次脉动功率(200 Hz)[17],引起直流母线产生脉动电压vd,其式为

( 8 )
式中:Ud为母线电压直流量;Cd为母线电容。
四次脉动电压vd的幅值远小于二次脉动电压,且频率加倍,因此对负载的影响较小。同时,混合动力动车组电机运行的最高频率为160 Hz,因此直流侧较小的四次脉动电压分量几乎不会对电机性能造成影响。由式( 5 )和式( 7 )分析可知,可以通过控制BDC解耦电容Ccs的电压ucs实现有源功率解耦。
1.2 控制策略
(1) 解耦电容指令电压的计算
对母线电压ud进行在线滑窗傅里叶分析,由于采样频率为2k,因此设置滑窗大小Nw=20,如图 2所示。

图2 在线滑窗傅里叶分析
在N时刻,直流母线上二次脉动电压的傅里叶级数C100(N)可以表示为
|C100(N)|ejθC100(N)
( 9 )
即
(10)
可以实时得到直流母线电容Cd上二次脉动电压为
ud100=Ud100sin(200πt+θ100)
(11)
分析式( 9 )可知,本文采取的滑窗傅里叶分析具有计算量小、存储量小的特点,且易于编程实现,能够随着程序的运行在线滑动,进行实时分析。
母线电容在100 Hz的交流阻抗远小于负载阻抗,因此大部分二次脉动功率都在母线电容流动引起脉动电压,该部分功率p100可以表示为
p100=200πCdUd100sin(200πt+θ100-0.5π)Ud
(12)
因此,可以计算更新得到二次脉动功率的指令值,即
p100ref=m100p100+p′100ref=
P100refsin(200πt+θ100)
(13)



(14)
具体的计算框图如图 3所示。

图3 解耦电容指令电压计算框图
(2) 双闭环控制
为实现有源功率解耦,最终目标是对解耦电容Ccs的电压进行控制,因此采用电压电流PI双闭环控制策略,控制框图如图 4所示。

图4 有源功率解耦双闭环控制

2 参数设计和可行性分析
2.1 参数设计
分时复用BDC的目的是在实现给电池充放电的同时,还要实现有源功率解耦,因此,对于参数的设计需要满足以上两种工作条件。
(1) 滤波电感Lcs
对于Lcs的设计主要是基于电池电流纹波的考虑,因为大的电流纹波会导致电池过热,使电池的额定输出功率下降。
根据给定的电池电流纹波要求和混合动力动车组的其他电气参数(表1)[18],可以计算得到滤波电感Lcs为
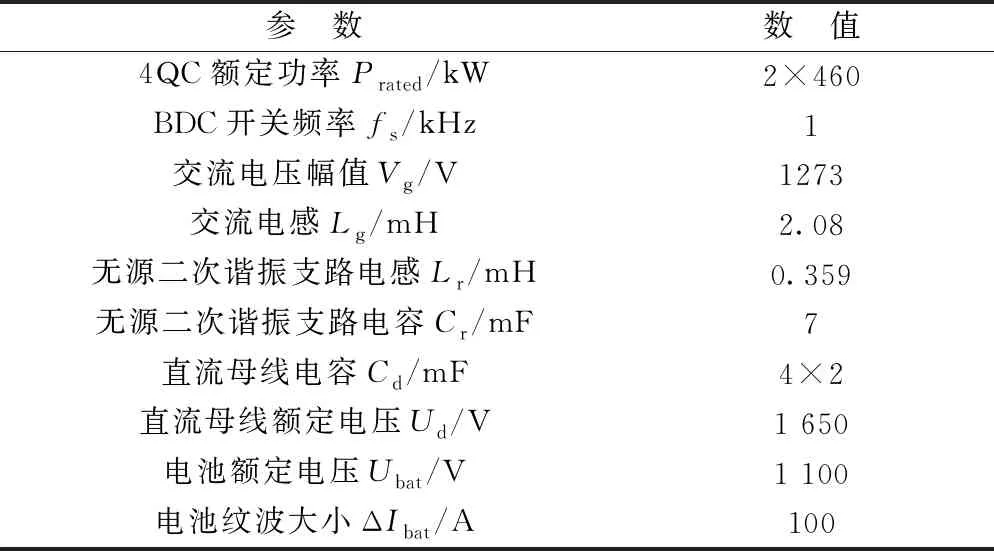
表1 混合动力动车组相关参数
(15)
为保留一定的裕度,选取滤波电感实际参数值Lcs为4 mH。
(2) 解耦电容Ccs
文献[7]分析了在不同给定直流偏置电压Ucs条件下,解耦电容Ccs的电压电流波形,并提出如果解耦电容Ccs在一个功率周期内完全充放电(即最大电压为直流母线电压Ud,最小电压为0),那么电容值将会比传统无源方式减小12.5倍。考虑实际情况,如果要求电流ics具有较快的变化速率,Lcs和Ccs串联支路的电压值将会很大,超出BDC能够调制得到的最大电压。因此,为了避免系统超调进入饱和状态,有如下限制条件(忽略损耗和开关纹波)
(16)
式中:mu为BDC上管IGBT的占空比,其取值范围为0~1.0。
另外,为保证系统安全性以及控制解耦电容Ccs体积过大(电容耐压越大,体积越大),加入如下限制
(17)
将表1参数以及Lcs代入式(16)和式(17),解耦电容Ccs和偏置电压Ucs的取值范围如图 5所示。根据式( 8 ),采用不同等级的颜色表示在不同取值范围下四次脉动功率引起的直流母线脉动电压Vdmax大小。

图5 解耦电容Ccs和偏置电压Ucs的取值范围
图5中在B点取值可以使母线脉动电压最小,为保留一定的裕度,本文选取参数为Ccs=1.25 mF,Ucs=1 100 V
2.2 可行性分析
(1) 电气应力分析
混合动力动车组牵引变流器如图 6所示,前端为两个4QC和两个BDC,以扩大系统功率等级,后级为牵引逆变器用于控制牵引电机,辅助逆变器通过与母线连接实现供电。通过对BDC进行改造,并入解耦电容Ccs,即可实现取代无源二次谐振滤波器。电池可以在动车组再生制动或者停站、停库时进行充电。不同于混合动力汽车,混合动力动车组的运行路线和运行班次都是能够提前规划的,因此,通过制定简单合理的能量管理策略,可以保证动车组全线范围内均保持合适的荷电状态,以满足通过无电区和应急牵引的需求。当动车组在接触网模式下处于牵引工况时,接触器K1断开,BDC即可工作于有源功率解耦模式,保证动车组良好的牵引性能。

图6 混合动力动车组牵引变流器
假设4QC运行在单位功率因数,根据表1系统参数和式( 3 ),可以计算得到解耦电容Ccs上的电流最大值Icsmax为
(18)
解耦电容Ccs上的电流有效值IcsRMS为
(19)
电池在额定工况进行充放电模式下,流经电池的电流Ibat为
(20)
由式(18)~式(20)可知,解耦工作状态下BDC的电流最大值比充放电电流略大,电流有效值小于充放电电流,因此BDC原来为电池充放电选定的IGBT桥臂等器件的电气应力以及相应的散热设计均能满足有源功率解耦模式运行的要求。
(2) 无源器件对比
BDC用到的电流电压传感器、滤波电感Lcs以及IGBT功率模块等原来就用于电池充放电,因此在这里不考虑他们的成本以及体积、质量。结合上文提出的控制策略可知,分时复用BDC仅需要在软件上对控制策略进行调整,在硬件上加入两个体积、质量较小且电容值仅为1.25 mF的电容Ccs,不需要增加额外的传感器,便于系统改造。
将传统无源LC谐振滤波和有源功率解耦用到的无源器件进行对比,可以得到如图 7所示的结果。可以看出,对比无源LC谐振滤波,采用有源功率解耦策略用到的无源器件的体积、质量分别下降为16.5%和17.0%,在提升牵引变流器功率密度的同时,还能减少设备投入,降低制造成本。

图7 无源器件对比
3 四象限变流器谐波抑制
3.1 谐波分析
因为无源LC谐振滤波器被取代,当动车组停站或停库通过接触网对动力电池进行充电时,BDC不能进行有源功率解耦,此时直流侧将存在明显的二次脉动电压。该二次脉动电压不仅使电压外环反馈输入存在二次脉动分量,还会经PWM调制输出谐波电压。
通过合理设置带阻滤波器(Notch Filter)可以使反馈电压ud_fb不存在二次脉动分量,保证了外环输出的电流指令值id_ref为直流量,因此,下面仅分析PWM调制输出谐波电压机理。
假设控制器输出的调制波vm为
vm=Amsin(100πt+θm)
(21)
式中:Am为vm的幅值;θm为vm的相位。
母线电压ud为
ud=Ud+ΔUdsin(200πt+θd)
(22)
式中:ΔUd为母线电压的脉动幅值。
4QC输出电压uout为两者乘积(忽略开关纹波)。
uout=udvm=UdAmsin(100πt+θm)+
A100πsin(100πt+θ100π)+A300πsin(300πt+θ300π)
(23)
式中:A100π和θ100π分别为PWM调制导致的基波分量的幅值和相位;A300π和θ300π分别为PWM调制导致的三次谐波分量的幅值和相位。
即二次脉动电压经过PWM调制将导致输出电压存在三次谐波分量。另外,在电力牵引网中,谐波成分复杂,主要是三、五次为代表的低次谐波。二次脉动电压生成的三次谐波与牵引网三、五次背景谐波分量会使交流电感产生明显的三、五次谐波电流。将交流电流进行PARK变换,三、五次谐波电流分量在d-q坐标轴均表现为四次谐波,具体分析参见文献[15]。
3.2 谐波抑制控制策略
根据内模原理可知,任何一个能良好抵消外部扰动或跟踪参考输入信号的反馈控制系统,其反馈回路必须包含一个与外部输入信号相同的动力学模型[19]。
因此,为抑制d-q坐标轴电流回路中的四次谐波分量,在原来电流环PI控制的基础上,并联频率为200 Hz的谐振控制器,构成PIR控制器。本文采用延时90°的方法构造虚拟β轴,再经过PARK变换得到交流电压和交流电流的d、q轴分量,具体的控制框图如图8所示。

图8 4QC谐波抑制控制策略
4 实验验证
为验证本文理论,基于混合动力动车组牵引变流器地面实验平台进行实验,平台硬件参数见表1。图9 (a)为牵引变流器正面,包括控制单元和接触器等;图 9 (b) 为牵引变流器背面,包括各模块功率单元和二次谐振滤波器电容Cr,BDC滤波电感Lcs及Lr等位于牵引变流器内部。Cr、Lr存在笨重、体积大的缺点。这两个无源器件降低了牵引变流器的功率密度,不利于动车组轻量化运行。

图9 混合动力动车组牵引变流器
4.1 有源功率解耦
如图 10所示,在无任何解耦模式下,直流电压ud存在明显的二次脉动,幅值高达17.3 V。当牵引电机运行到高速区时,其工作频率接近100 Hz,该脉动电压会导致极其严重的拍频现象,引起电机转矩脉动和发热,影响动车组安全稳定运行。
当BDC工作于有源功率解耦时,直流电压脉动明显减小,如图 11所示。图 11 (a)和图 11 (b)分别为负载突降和突增情况下,各实验波形的动态变化,可以看出,本文采用控制策略动稳态性能良好。当检测到母线电压ud存在二次脉动电压时,解耦电容Ccs的指令电压ucs会不断更新,直至完全解耦母线电容Cd全部的二次脉动功率,控制效果明显。图 11 (c)为同等功率下,加入有源功率解耦后母线电压ud的傅里叶分解,可以看出母线电容几乎不再存在二次脉动电压,而四次脉动电压仅由0.5 V上升到了3.5 V,其幅值减小且频率加剧,不再影响牵引电机的全速度范围内运行。

图11 有源功率解耦
4.2 四象限变流器谐波抑制
实验平台能承受最大功率为150 kW,当交流电压为1 273 V时,交流电流ig的开关次谐波占主要成分,基波较小不易观察。因此为了使交流电流ig的基波幅值占主要成分,便于在示波器上观察,在同等功率下,将交流电压幅值Vg降低为120 V,母线电压指令Ud_ref设为150 V,其余硬件参数仍同表1。在实验中,将图 8控制过程中的变量id和ud_fb均通过控制单元的DA输出,便于在示波器上观察。交流电压ug含有低次谐波分量,其傅里叶分析结果如图12所示。

图12 交流电压ug傅里叶分析
图13为仅加入带阻滤波器前后对比。由图 13 (a)可知,加入带阻滤波后,反馈至控制回路的ud_fb不再存在二次脉动。对比图 13 (b)和图 13 (c)可知,加入带阻滤波后,交流电流ig三次谐波从16.7 A下降为15.6 A,降幅不明显。这说明经电压外环控制得到的id_ref虽然不再含有脉动分量,但存在二次脉动的母线电压经调制波um脉宽调制后,仍会导致明显的三次谐波电流;同时,因为实验平台供电电压ug存在较少的三、五次背景谐波,导致交流电流存在相应的三、五次谐波电流,以上两种因素导致电流id存在明显的四次脉动,如图 13(a)所示。

图13 带阻滤波谐波抑制效果
图14为在对母线电压ud进行带阻滤波的基础上进一步加入了谐振控制,由图 14(a)可以看出,id的四次脉动明显减小。通过对交流电流ig进行傅里叶分析可知,其三次谐波分量由15.6 A下降到了3.7 A,五次谐波分量由1.2 A下降为0.4 A,谐波成分明显减小。

图14 带阻滤波+谐振控制谐波抑制效果
5 结论
(1) 提出分时复用混合动力动车组的BDC,不仅能够实现为动力电池充放电,还能取代无源LC谐振滤波器解耦二次脉动功率,达到提升牵引变流器功率密度的目的。
(2) 分析BDC有源功率解耦原理,对解耦电路的参数进行设计,并具体分析分时复用的可能性。
(3) 基于BDC拓扑,提出通过检测直流母线电压计算得到实际二次脉动功率,由此给出解耦电容目标电压指令值,通过电压电流双闭环控制实现了有源功率解耦,不需要增加传感器,易于系统改造。
(4) 充电状态下直流母线电压二次脉动和牵引网三、五次电压谐波会使4QC输出电流出现谐波分量,表现在d-q坐标轴下为四次谐波分量,通过对直流电压带阻滤波并加入谐振控制器,实现了谐波抑制。
猜你喜欢
电子制作(2019年12期)2019-07-16 08:45:14
通信电源技术(2018年3期)2018-06-26 08:05:48
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
互联网天地(2016年2期)2016-05-04 04:03:23
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
火控雷达技术(2016年3期)2016-02-06 02:30:40
广西文学(2015年9期)2015-10-24 03:53:14
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年13期)2015-04-09 11:57:34