
基于小波包分解与GG模糊聚类的转辙机退化阶段划分研究
2022-04-01 07:51武晓春
铁道学报 2022年1期
武晓春,楚 昕
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
道岔是铁路基础装备中的关键设备,对其状态性能的掌控直接关系到铁路运输的安全。目前对道岔转换设备状态的分析主要依靠微机监测系统与人工结合的方式[1],相关研究也都集中在故障类型的特征提取和分类[2-7],而从状态检修理论出发,分析转辙机性能退化规律的研究相对较少。实际上,在日常工作中,及时准确地识别转辙机由正常到失效的发展阶段,可以合理指导现场的设备检修和更换,从而提高整个道岔的运行可靠性。
道岔转辙机退化阶段划分需要解决2个关键问题:①提取关键退化特征;②准确识别退化阶段。
退化特征提取是准确划分道岔转辙机运行状态的基础,时域和频域统计特征因计算简便快速而在该领域得到一定的应用,如信号的有效值、方差、平均频率等[8-11]。然而,这种特征提取方法本质上是基于线性信号分析的,不能完全反映转辙机性能退化过程中的非线性规律。小波包变换常用于提取非线性信号的特征,将小波包分解用于道岔转辙机性能退化特征分析有一定的研究空间。
退化阶段识别是转辙机状态划分中的难点问题。与故障诊断不同,性能退化是一个连续性的演变过程,同一种状态内的退化特征在时间尺度内具有连续性[12]。因此,识别算法的选择不仅要考虑聚类的精度,还要注意时间的连续约束效应。
fuzzy C-means和GK算法是模糊聚类分析中常用的模式识别方法之一。其中,fuzzy C-means利用欧氏距离计算样本间的相似度,一般只适用于球形数据集[13];GK算法引入了自适应距离范数和协方差矩阵,能够反映数据沿任意方向或子空间的离散程度,并且不改变聚类算法产生的类似球体的聚类状态[14]。以GG为代表的无监督聚类,引入模糊最大似然估计方法来度量样本之间的距离,故可以反映不同形状和不同方向的数据类[15]。文献[16]成功地将GG聚类算法应用于滚动轴承劣化性能的识别,在分类识别方面取得了较好的效果。
综上,本文提出一种基于小波包分解与GG模糊聚类的道岔转辙机退化阶段划分研究方法,用小波包分解提取ZYJ7转辙机功率曲线信号的有效特征向量,用模糊聚类解决转辙机性能退化下降的问题,并使用某铁路局集团有限公司近2个月的历史数据对该方法进行验证。
1 基础理论
1.1 ZYJ7转辙机
ZYJ7系列电液转辙机(以下简称“ZYJ7转辙机”)采用三相异步电机驱动、液压传动方式进行道岔位置的转换,由两部分构成,分别是ZYJ7系列电液转辙机主机和SH6型转换锁闭器。电液转辙机主机用于第一牵引点,SH6型转换锁闭器用于第二牵引点,动力通过二者之间的油管进行传递。由于ZYJ7转辙机取消了减速器和齿轮传动,大大减少了机械磨损,使得设备结构进一步简化,因此,在我国提速区段和高速区段中使用最为广泛,多应用于车站正线和主要侧线。
目前,微机监测系统是通过分析电流曲线或功率曲线来监测转辙机的工作状态。然而电流数据只能反映电路电流的相关特性,因此用这种方法得到的分析结果稍显不足。实际上,道岔转换过程的工作状态可由转辙机输出工作拉力的变化情况来反映,并直接体现在转辙机的动作功率上[17]。且功率数据还与转换电流、电压有关,包含的退化参数信息更多,与道岔转换时的实际状态存在明显对应关系。提速道岔微机监控系统,如TJWX-2006系统增加了转辙机转换功率的监测部分。对转辙机动作功率曲线进行分析,可以获得道岔转换过程的整体情况,对设备运营维护具有指导作用。因此,本文以ZYJ7转辙机动作功率曲线为对象,对其性能退化阶段划分进行研究。
1.2 小波包分解
特征提取就是以特征信号作为源信号确定各种参数并以此为向量组成表征信号特征的特征向量[18]。在道岔工作状态特征提取中,通常提取动作电流或动作功率作为各动作阶段的特征,这样忽略动作曲线上数据点之间的信息。小波分析在时域和频域都具有良好的局域化性质[19-20],然而它不能很好地分解和表示包含大量详细信息的信号。小波包分解将信号投影到一组互相正交的小波基函数张成的空间上,并将信号划分到不同的频段,通过其多通道滤波的功能,信号间的干扰也大大消减。小波包不仅能对小波变换中不能再继续细分的高频部分进行进一步处理,还能根据信号特性和分析要求自适应选择相匹配的频带与频谱,可以更有效地从信号中提取信息。具体分为以下4步:
Step1小波包分解。对转辙机的功率信号进行n层分解,得到2n个小波包系数X(n,i)(i=0,1,…,2n)。信号小波包分解树形图见图1(n=2)。图1中,S为原信号;A为低频分量;D为高频分量;下标为分解层数。

图1 信号小波包分解树形
Step2分频段重构信号。以W(n,i)为对应小波包系数X(n,i)的重构信号,则总信号W为
W=W(n,0)+W(n,1)+…+W(n,2n)
(1)
Step3计算各频带信号的总能量。以E(n,i)为对应频带信号W(n,i)的频带能量,则
(2)
Step4构造特征向量。当道岔转辙机工作状态有异常时,其信号各频带内能量会发生较大变化,因此n个频带的能量值组成n维特征向量T,用来表征转辙机状态。
T=|E(n,0)E(n,1) …E(n,2n)|
(3)
1.3 GG模糊聚类
1.3.1 GG聚类算法
转辙机的性能退化过程具有随机、模糊、不可预知的特点,而且退化阶段的边界确定也是难点。无监督聚类方法通过分析转辙机特征数据的相关性,将其划分为不同退化阶段,是解决道岔转换设备工作状态数据分类困难的有效方法。
GG聚类算法使用模糊最大似然估计来衡量样本之间的距离,因此,与fuzzy C-means和GK算法相比,可以进行非规则分布的不同形状方向的数据分析。具体步骤如下:
Step1设ZYJ7转辙机正常非故障的运行数据样本矩阵为Z,Z=|z1z2…zb|,b为特征向量的个数。利用隶属度划分矩阵U=[uky]c×b作为判定依据,将样本聚成c类(c≥2),uky为第y个样本隶属于第k个样本的聚类程度。
Step2假设每个分类的聚类中心向量为V,V={v1,v2,…,vc}。GG模糊聚类通过迭代(U,V),使目标函数Jm取得最小值为
(4)
(5)
(6)
(7)

设定迭代的终止容限ε,有ε>0,并随机初始化隶属度矩阵U。

(8)
Step4更新隶属度矩阵。
k=1,2,…,cy=1,2,…,b
(9)
直到满足条件‖Ul-Ul-1‖<ε,终止迭代。
1.3.2 聚类效果
为了直观的得到聚类效果,本文选用分类系数和平均模糊熵2个指标进行综合评价。
分类系数(Classification Coefficient,CC)是隶属度的方均值,记作α,其值越接近1,聚类效果越好。计算公式为
(10)
平均模糊熵 (Average Fuzzy Entropy,AFE) 是隶属度分布所蕴含的信息熵大小,记作β,其值越接近0,聚类效果越好。计算公式为
(11)
2 退化阶段划分
目前,现场应用中将转辙机性能退化过程主要划分为正常和故障两个阶段。基于此划分方式下的维修策略只能实现被动的维修模式,不利于实现转辙机工作效益的最大化。但据研究表明,道岔转换设备在性能退化过程中会经历从正常到失效等多个退化状态[21],针对转辙机退化状态进行分析,能够提前对转辙机故障趋势进行预警,从而达到主动维修的目的。
本文以ZYJ7转辙机的非线性退化为研究核心,通过对其正常无故障功率曲线数据进行研究,构建退化性能指标,以小波包分解和GG聚类算法为基础,搭建转辙机退化阶段划分方法。该方法的退化状态划分流程见图2。

图2 退化状态划分流程
3 实验验证
3.1 实验数据
对于道岔转换设备,微机监测系统[22]采用特殊的电流、电压、功率传感器来监测开关机的工作功率;当1QDJ启动时,采集单元开始工作,每40 ms采样一次三相电流、电压数据;传感器将开关动作电路与采集电路隔离,根据电压值、电流值和功率因数进行模数转换计算有功功率值;以1DQJF第4组接点为触发条件,将1DQJF吸起时间内的监测数据送站机处理,经复杂的逻辑运算,还原ZYJ7功率曲线。正常工作状态下同一转辙机在不同时间内的功率曲线见图3。

图3 功率曲线
从图3中可以发现:在动作和锁闭区,功率均有不同程度的波动,可能是由于道岔活动部位缺油或下拉装置漏油导致其转换阻力增大,如果调整不当极可能造成道岔卡阻;在解锁区,功率峰值略有不同,分别为2.5、2.94、3.0 kW。TG/XH 101—2015《普速信号维护规则》[23]规定,ZYJ7转辙机的功率曲线峰值不能超过3 kW。当转辙机解锁不良时,转辙机动作功率曲线一般会出现解锁功率相对偏高的现象[17],但整体变化趋势与正常动作功率曲线相差不大,易被人为忽略。若不能及时察觉与维护,会导致解锁失败,致使转辙机一直处于空转状态,不能转换到位,最终影响行车安全及效率。同时,解锁时功率值偏低可能是道岔密贴不足,导致解锁时未形成峰值区段[21]。这种情况下,若任其发展,则可能会导致道岔尖轨与基本轨不密贴,造成严重的安全事故。
通过上述分析可以判断,该转辙机存有一定的安全隐患。但在现场实际工作中,却将其划分在同一正常工作状态,给列车的安全运行带来了风险。
为验证基于小波包分解与GG模糊聚类的道岔转辙机退化阶段划分研究方法的可行性,现场采集了某铁路局集团有限公司近2个月共计258个转辙机动作非故障功率信号数据进行分析。
3.2 特征提取
首先,以微机监测采集的ZYJ7转辙机的动作功率为数据源,依据“db4”小波函数,用3层小波包分解转辙机动作无故障状态下的功率;然后,以第3层各节点系数为参数,计算小波包能量熵,从而得到特征向量。3层小波包分解特征提取部分数据见表1。
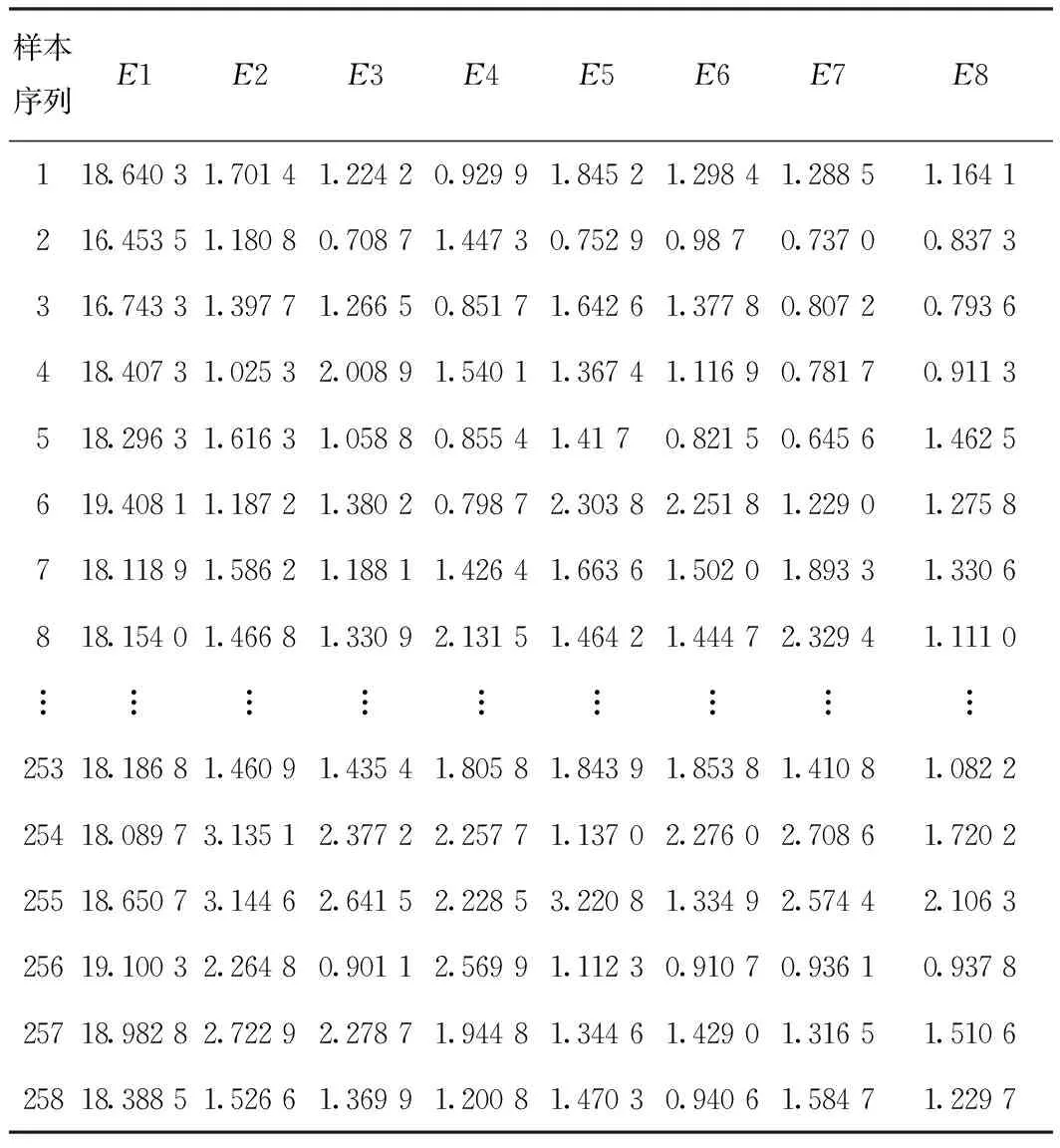
表1 3层小波包分解特征提取部分数据
3.3 退化阶段划分
本文运用GG聚类分析,对转辙机从正常运行到逐渐失效的退化演变规律进行研究。参考文献中常用的不同退化阶段划分方法[22,24]一般划分为3~5个阶段。本文将由小波包分解得到的特征向量经过PCA降维得到最具代表性的2个归一化特征PC1、PC2,采用GG模糊聚类算法分别对3、4、5个退化阶段进行无监督聚类。设置参数为:c= 3/4/5,m= 2,容差ε=0.000 01。GG聚类等高线见图4,其中红色圆圈的中心为集群中心。

图4 GG聚类等高线
由图4可见:图4(a)中的聚类集中在聚类中心,簇与簇之间没有重叠;轮廓边界划分间隔大,分类效果更好。计算聚类指标分类系数和平均模糊熵值,不同阶段聚类定量评价结果见表2。
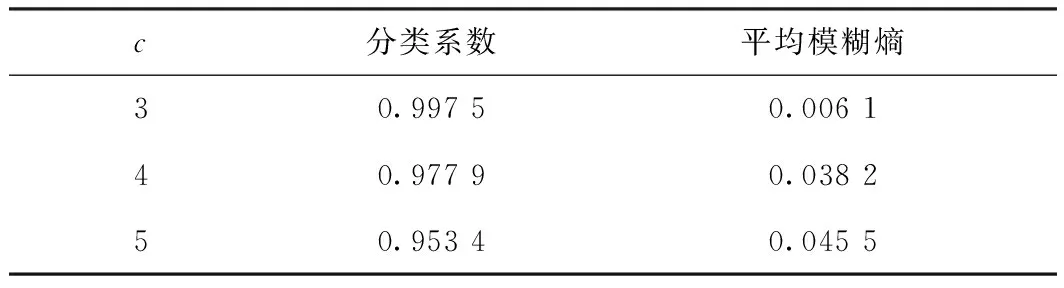
表2 不同阶段聚类定量评价结果
由表2可见:当分类阶段c=3时,分类系数为0.997 5,与其他2种划分阶段相比更接近于1;平均模糊熵为0.006 1,与其他2种划分阶段相比更接近于0;因此,当c=3时,特征信息更为集中,同一种运行状况聚集更紧密,不同的运行状态能有效的分离开。
结合现场调研结果,将上述转辙机聚集的退化过程划分为正常、轻微退化和严重退化3种状态。此划分方法揭示了转辙机运行状态中聚集隐含的退化阶段,同时避免了主观划分方法缺乏一定科学性的不足,为状态检修提供了依据。3种阶段聚类图形中心坐标见表3。

表3 3种阶段的 GG 聚类图形中心坐标
为了验证本文研究方法的优越性,应用已在设备退化分析领域广泛应用的fuzzy C-means算法和GK算法对表1数据进行对比分析,聚类等高线见图5。
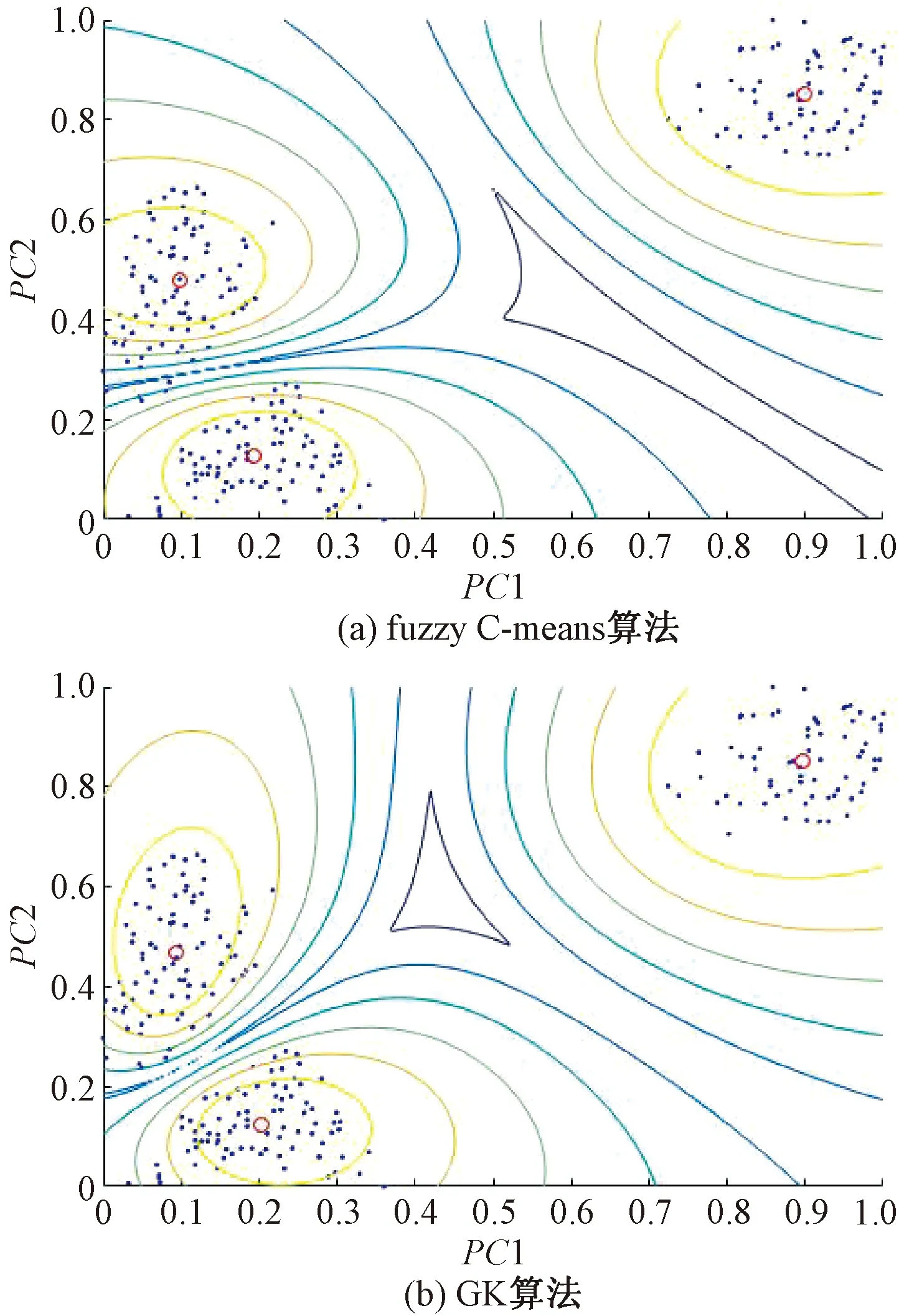
图5 聚类等高线
由图5可以看出:与GG聚类相比,各聚类算法的聚类中心差异不大;但从聚类的轮廓形状来看,fuzzy C-means轮廓形状类似于圆形,GK聚类形似椭圆形,而GG模糊聚类的等高线为任意形状,表明GG模糊聚类对数据源的分布要求较低;从等高线的分布上来看,GG 聚类算法的分类间隔较大。
同时,计算3种聚类算法的分类系数和平均模糊熵,量化比较算法的聚类性能。不同聚类算法定量评价结果见表4。
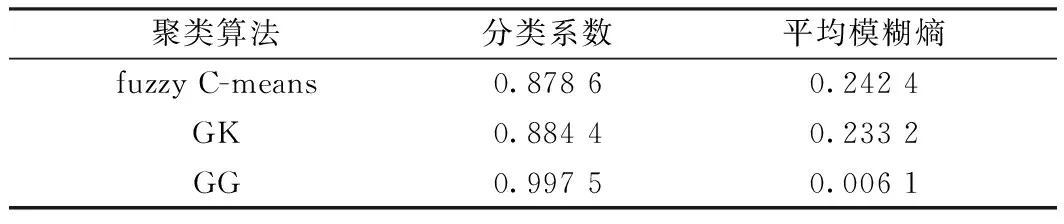
表4 不同聚类算法的定量评价结果
由表4可见:GK和fuzzy C-means两种聚类算法的平均模糊熵较高,分别为0.233 2和0.242 4,同时分类系数较低,分别为0.884 4和0.878 6,说明容易造成转辙机退化状态的误判;综合来看,GG聚类算法的分类系数为0.997 5,退化阶段的分类效果最好,同时平均模糊熵最低为0.006 1,说明在上述3个退化阶段中,GG算法的聚类效果最佳。
最后,针对GG聚类得到的3个退化阶段,随机抽取表1中的现场部分数据,建立样本数为100的测试数据集。表5为分别利用fuzzy C-means、GK 聚类、GG聚类得到的部分测试数据的隶属度,根据最大隶属度原则,隶属度最大的为划分结果。
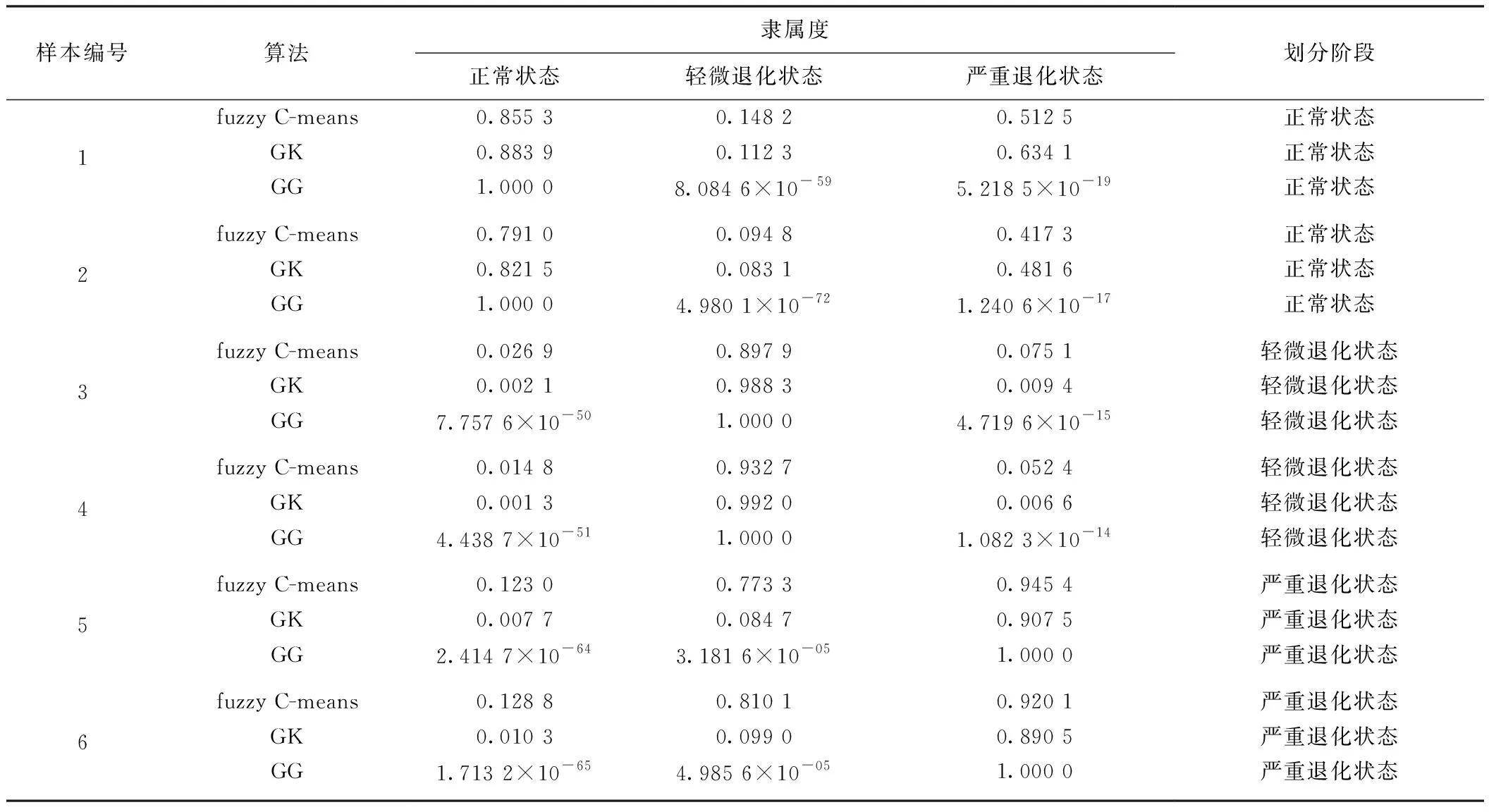
表5 聚类的隶属度值
不同聚类方法退化阶段划分结果准确率见表6。从表6可以得出,GG模糊聚类算法的划分准确率最高,3个退化阶段划分的平均准确率为96.6%,再次证明了基于GG聚类的转辙机退化阶段划分方法在转辙机实例动作功率曲线的应用中是有效的。

表6 不同聚类方法退化阶段划分结果准确率 %
4 结论
本文提出一种基于小波包分解与GG模糊聚类的道岔转辙机退化阶段划分方法,通过对现场实测数据的分析验证,可得到以下结论:
(1)根据转辙机设备在不同性能退化状态下功率信号频带能量分布的差异,利用小波包分解提取能量特征,避免损失有效特征信号的高频部分,是一种有效提取ZYJ7转辙机性能退化的方法。
(2)相对于fuzzy C-means和GK聚类,GG任意形状的聚类效果能够确切反映ZYJ7转辙机性能退化分散程度,聚类优势明显。
(3)实验证明,本研究提出的道岔转辙机退化阶段划分的方法能够较好地区分转辙机的不同状态,且状态之间不存在重叠,是一种有效的转辙机退化状态特征提取和数据聚类的方法。
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
铁路通信信号工程技术(2022年6期)2022-06-27
科技视界(2022年10期)2022-05-20
电子乐园·上旬刊(2022年5期)2022-04-09
测控技术(2022年1期)2022-02-25
铁道勘察(2021年5期)2021-11-18
成都信息工程大学学报(2021年1期)2021-07-22
铁道运营技术(2021年2期)2021-04-01
计算机测量与控制(2020年12期)2021-01-07
北京信息科技大学学报(自然科学版)(2019年1期)2019-03-18
