三爪联动式油茶花采摘执行末端设计研究
2022-03-22 04:24:10吴泽超李立君
中国工程机械学报 2022年1期
吴泽超,赵 青,李立君,郭 鑫,李 骏
(中南林业科技大学机电工程学院,湖南 长沙 410004)
油茶(Camellia oleifera Abel)属灌木或乔木,主产于中国,为我国南方重要木本食用油料树种之一。其籽榨取的茶油营养丰富,不饱和脂肪酸含量高,脂肪酸组成合理,是一种优质、保健、适宜人体吸收的高级植物食用油,同时也是一种重要的医药、化工等工业的原材料。油茶树生长相对缓慢,生命周期长。每年的秋季开花,次年的秋季结果,民间称之为“抱子怀胎”,这是油茶生殖过程的一大特征[1]。掌握油茶各品种的开花授粉习性,对合理调控花果生长、提高产量意义十分重大[2]。油茶花自交不亲和,摘取油茶花取粉,再进行人工授粉能够提高产量。目前油茶花的收集具有较大的难度,市场上未出现相应的采摘花朵的机械设备,基本全靠人工收集,效率极低。智能机器人的发展顺应农林机械发展的潮流,智能采粉机器人也将是农林机械发展的重要方向,因此智能采摘机器人执行末端的研究有着重要价值。
目前,我国农业应用机械手基本处于试验阶段,因为机械手的体积过大,动作相对缓慢,没有办法实现完全智能作业。马兴灶等[3]提出效仿果农的采摘方式与自行车的刹车结构,研制出菠萝采摘机械手。孟彩茹等[4]研制了一种应用于配药机器人的机械手爪,利用双滑块机构原理,从而实现机械手爪的抓紧与松开。左斌等[5]研制了多功能苹果采摘机,通过连杆实现卡爪的闭合,通过电机拧断果茎,采摘果实。穆龙涛等[6]研发了一种机器人采摘猕猴桃的一体化末端执行器来进行采摘。相对国内而言,国外对于机械手的研发应用技术更成熟些。美国研究者Uppalapati 等[7]研制了一种具有红外反射传感系统的柔性手爪,并应用于浆果的采摘。美国研究人员Ishige等[8]提出了一种柔性机械手,通过简单的控制实现类似于人的指尖表面滑动运动,进行物体抓取。
油茶花花朵采摘机械手要实现花朵采摘目标,必须完成2个主要动作:首先是包络花朵,其次要精准将花朵从枝头采摘下来[9]。油茶花如图1所示。

图1 油茶花Fig.1 Camellia
1 总体设计
1.1 方案选择
考虑油茶花的形状以及采摘后的输送、收集方式,共提出以下3种末端执行装置的设计方案。
方案1两爪剪夹式末端执行装置,如图2所示。

图2 两爪剪夹式末端执行装置Fig.2 Two-jaw scissor-type end effector
方案2四爪夹持式末端执行装置,如图3所示。
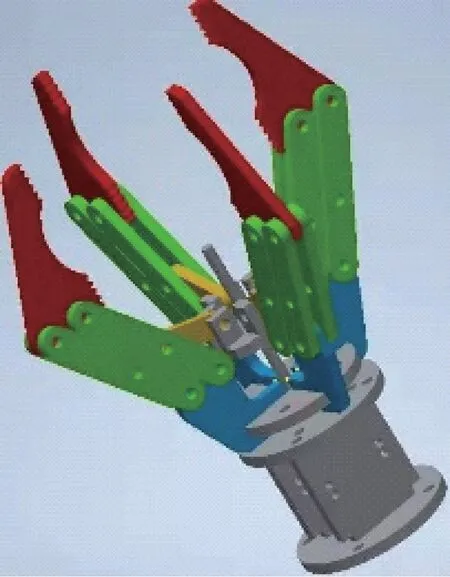
图3 四爪夹持式末端执行装置Fig.3 Four-jaw gripping end effector
方案3三爪联动式末端执行装置,如图4所示。
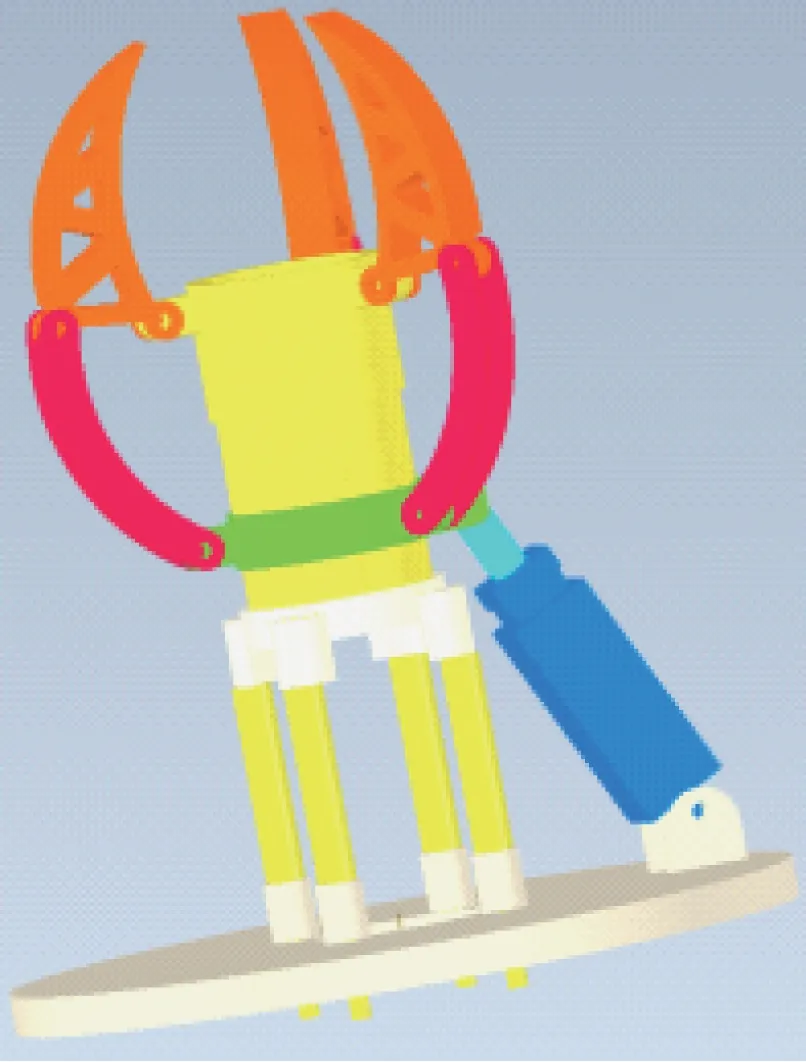
图4 三爪联动式末端执行装置Fig.4 Three-jaw linkage end effector
通过方案对比,该3类方案均可在机械臂的扭转拉力下达到油茶花的采摘需要。但是,方案1 的夹持力会使油茶花产生损伤,夹持力过大还会导致油茶花粉脱落丢失。除此之外,方案1与方案2的末端执行装置在采摘结束后,需将机械臂移动到收集箱上方才能收集到油茶花。为防止手爪卡塞油茶花,方案2 还需要使手爪竖直向下打开。相比之下,方案3 的设计满足完整采摘与及时运输的设计目的。
1.2 设计要求
对于方案3 设计一款三爪联动式执行末端,要求研制能够将整朵花包含于夹爪机构内,内部通风管道直径能够顺利通过油茶花朵,并研究手爪闭合加持力与同步环的运动关系。设计手爪应考虑以下几个因素:油茶花朵最大直径为6 cm,手爪的开合极限应满足花朵的最大直径,确保在抓取过程中能够将花朵全部包络在手爪内;手爪机构必须具有确定的运动条件;手爪闭合过程中,应在手爪完全闭合时所受夹持力最大;手爪机架气道孔径不能低于2.5 cm,应满足在气力输送过程中花朵能够顺利通过管道。
1.3 工作原理与过程
基于以上设计要求,在稳定性和灵活性的多方面因素上考虑,确定手爪指数为3 指[10]。采用了电推杆带动同步环,通过曲柄滑块机构来实现手爪的开合,如图5 所示。手爪抓取时。给连接在静平台6的电推杆7输入一个高频电信号,电推杆7伸长,推动同步环3沿机架8外壁向上运动,通过链接的C形连杆2推动L形手指1做逆时针旋转,使得手爪闭。L型手爪1顶部夹紧花朵底部,使花朵能够从枝头脱落,达到采摘目的。掉落的花朵通过利用支杆5 与锁止环4 固定在静平台6 的机架8 内部气道输送运输到收集装置中。手爪张开时。给电推杆7输入一个低频电信号,使得推动同步环3 向下运动,拉动C形连杆2推动L形手指1做顺时针旋转,使得手爪打开。经过设计,手爪闭合内部直径为6.5 cm 满足油茶花朵最大直径,能够完全抓取。内部管道测量为3 cm,满足花房最大直径,能够顺利运输。
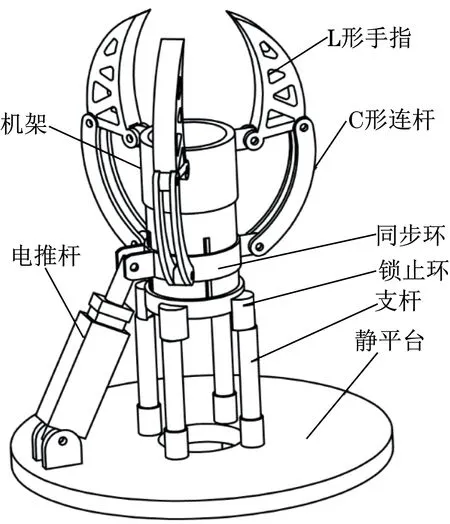
图5 3指联动油茶花朵采摘机械手Fig.5 Three-finger linkage camellia flower picking robot
2 主要参数设计计算
2.1 手爪自由度分析
根据自由度的计算公式:

式中:F为装置的自由度;n为活动构件;pl为低副个数;ph为高副个数。
活动构件为3 个,旋转副有3 个,移动副有1个,高副个数为0 个。计算可知,装置的自由度个数为1,原动件的个数等于装置的自由度个数,装置运动具有确定性[11]。
2.2 手爪力传动比分析
手爪尺寸小巧,质量轻巧,采摘对象为花朵,故对手爪的受力要求不大,但最后手爪末端的夹持力大小是设计的重要指标。因此,机械手爪的力传动比是手爪静力学分析重要指标。根据设计方案绘制手爪机构结构简图,如图6所示。

图6 手爪机构运动简图Fig.6 Schematic diagram of the movement of the claw mechanism
根据图2 结构简图,选取同步环3、C 形连杆4、L 形手指5 作为分析对象,忽略各构件所承受的重力,其受力如图7所示。
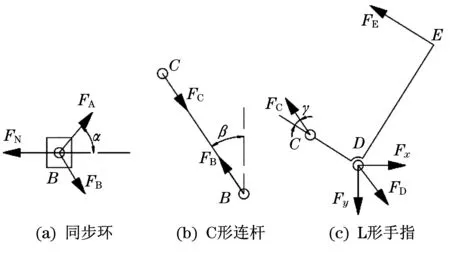
图7 手爪受力图Fig.7 Force diagram of the paw
由图7建立的手爪受力图得到静力方程为

式中:FA为电推杆给同步环的推力;FB为同步环给连杆的压力;FC为连杆给手爪的压力;FE为手爪加紧后树枝给手爪的反作用力;α为电推杆在同步环上与水平方向的夹角;β为连杆与桶壁之间的夹角;γ为连杆与手爪的夹角;lCD为手爪CD之间的距离;lDE为手爪DE之间的距离。
通过整理式(2)中的关系方程式得到传力比表达式为

余弦定理的关系式为

式中:同步环B到铰链A的垂直距离为HAB;lBD为滑块B与C点之间的距离。
由式(4)得到电推杆的长度与同步环B的位移关系表达式为

式中:LAB为电推杆在地面的投影;HAD为A点到D点的垂直距离;HAB为电推杆AB在垂直方向的距离。
因为连杆尺寸已知,所将根据式(3)~式(5)将连杆之间的夹角问题转化为连杆的尺寸问题,并得到连杆之间表达式为

将式(8)~式(10)带入式(3),得到传力比与连杆之间的关系式为
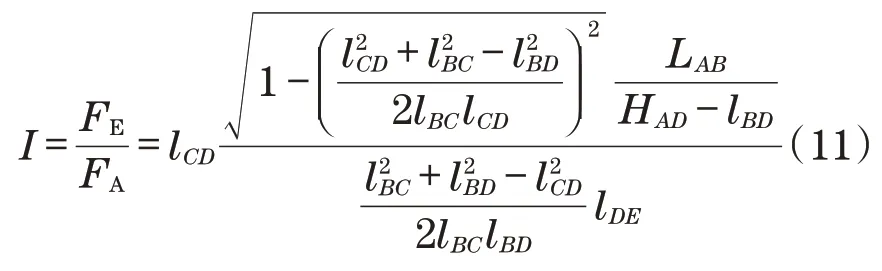
整理得

根据得到的关系式可知,手爪的传力比与同步环的位移距离lBD呈一次线性比例关系,得到同步环在移动距离最大值时,达到手爪夹紧力传递最大值。
3 手爪运动效果仿真
3.1 ADAMS运动仿真
软件ADAMS 在专业建模功能中相对较弱,结构复杂的仿真模型通常由专业建模软件导入ADAMS 中进行仿真。本次仿真的机械爪模型由inventor 软件进行建模,并将模型文件保存为.stp格式文件,然后启动ADAMS软件新建模型,进入工作界面,在File 工具栏选择Import 将所选择的stp格式模型文件导入ADAMS中,如图8所示[12-14]。
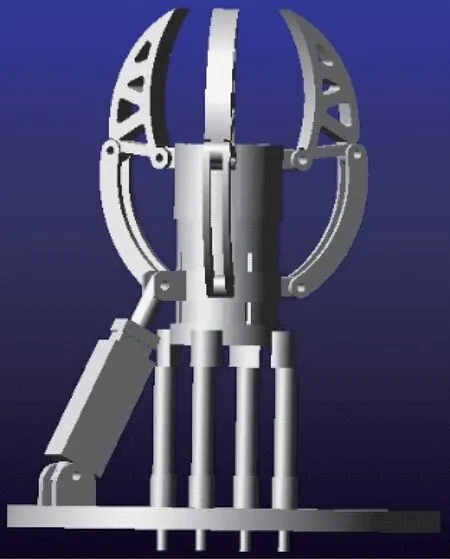
图8 ADAMS中三维模型Fig.8 3D model in ADAMS
模型导入后,在ADAMS 中,对机械手爪的各个构件的材料进行定义,因为底盘、支撑细杆、锁止环、运输筒是刚性链接,通过布尔操作将其合并成一个实体。模型中各个部件的名字与自身材料如表1所示[15]。
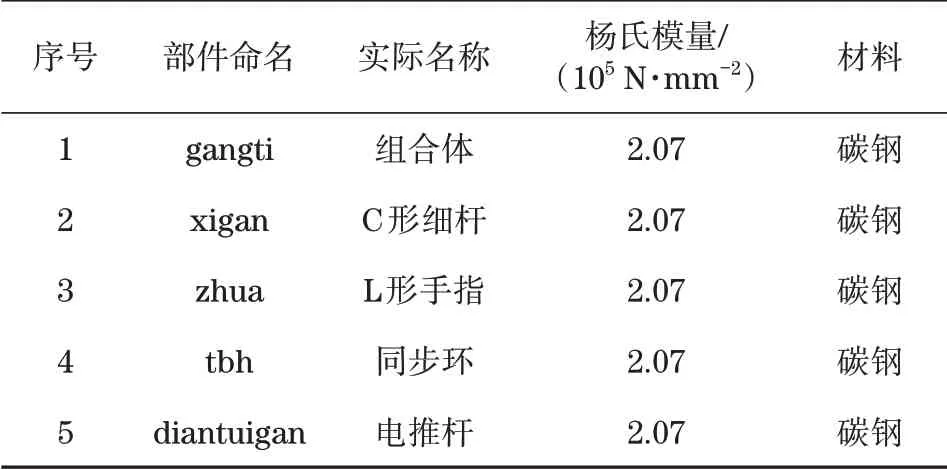
表1 模型部件命名Tab.1 Model Part Naming
选择好机构的材料后,根据各个部件之间运动关系和受力情况,再用ADAMS 软件建立相对应的转动副与移动副,约束情况如图9 所示,模型的详细约束表达信息如表2 所示。由于该机械手爪为3个手指单元间隔120°分布构成,且结构相同,3组机械手指所受约束也相同。表2 所表示的约束数为一组机械手指所受约束[16]。

图9 ADAMS运动副建立Fig.9 ADAMS sports vice establishment
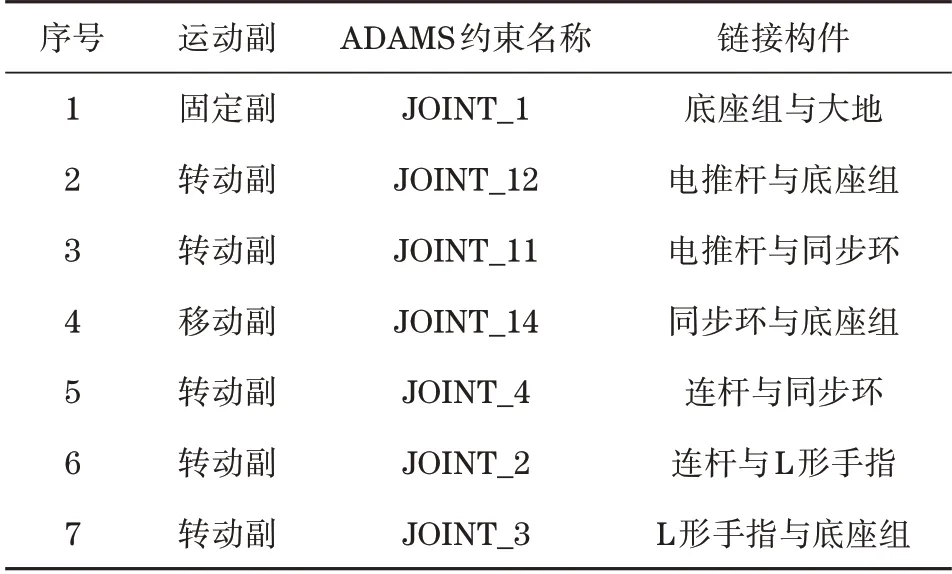
表2 模型约束表Tab.2 Model Constraint Table
由式(1)得到该机构的自由度为1,所以只要增加一个驱动力即可,对电推杆进行阶跃函数驱动,对电推杆的运动做速度驱动,施加驱动函数STEP(time,0,0,1,-7)+STEP(time,1,0,2,13)+STEP(time,2,0,3,-13)+STEP(time,3,0,4,7)手爪便可以做出唯一的确定运动。电推杆的函数驱动曲线与手爪质心速度变化曲线如图10所示。
该装置的3 指为间隔120°均匀分布,所以检测其中一指的运动变换即可,选择与电推杆在统一坐标系下的手爪进行监测,因为电推杆的推动使得手指进行开合抓取,所以检测手指在x坐标轴下的质心速度变化。在建造的模型中,参考工作的实际情况,手爪初始工作位置并未设置为机构极限位置。在电推杆运动过程中,首先将同步环推至极限全开位,再将同步环推到极限闭合位,工作结束,手爪回初始位置。所以STEP 速度函数曲线与手爪质心的速度变化曲线的变化曲线成镜像。由图10 可得手爪的运动变化曲线与STEP 的驱动函数变化曲线规律相符合,符合机械手运动过程中的动作特征。在同步环的推动下,手爪进行工作,手爪的质心运动轨迹曲线如图11所示。

图10 电推杆驱动函数与手爪质心变化曲线Fig.10 Electric push rod driving function and the change curve of the center of mass of the gripper

图11 手爪的空间轨迹曲线Fig.11 The space trajectory curve of the paw
由图11 可知,在装置运动过程中,手爪的质心轨迹曲线呈现圆滑弧线状,使得在采摘过程中,油茶花会被缓慢包络进曲线内部,现在呈现圆滑曲线以保证在夹持过程不会因为刚性冲击,蹭落花瓣,损失花药。在机械手运动过程中,机械手质心的加速度变化曲线与同步环位移变化曲线如图12所示。
如图12 所示,当电推杆启动与停止时会产生惯性冲击,加速度在0 s与4 s的时候产生加速度突变。加速度在1 s、4 s 处发生加速度突变的原因是手爪在运动过程中,机械手爪、连杆、同步环本身具有质量,当同步环位于最低端极限位置时,会产生极限位置冲击力与惯性力,因此使得此时的加速度发生突变。由图12 可知,同步环的位移距离与加速的变化趋势相同,同步环的位移变化与机械手爪的夹紧力趋势相同。
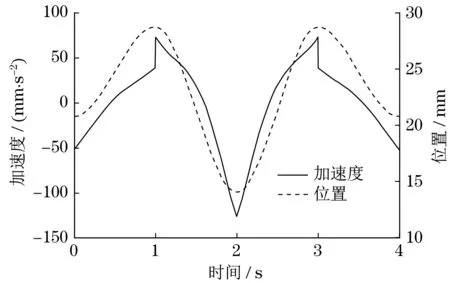
图12 手爪质心加速度与联动环质心位移曲线Fig.12 Gripper centroid acceleration and linkage ring centroid displacement curve
4 样机实验
通过3D 打印技术加工出手爪样机,配合控制机构进行采摘试验,如图13 所示。观察手爪的运动情况,手爪在运动过程中能够实现平稳运动,手爪在闭合时夹爪的末端夹紧力最大,手爪运动轨迹呈现能够包裹花朵的包络线。手爪设计满足设计要求,也能够满足采摘要求。

图13 手爪实物图Fig.13 Real picture of hand claw
5 结论
本文以油茶花花朵为研究对象,设计了一种智能采摘机器人的末端执行装置,该装置为一种由电推杆推动的三爪单节联动机械手爪。该机械手爪的开合极限满足了花朵的最大直径,能够确保在抓取过程中能够将花朵全部包络在手爪内。该机械手爪的运动符合运动规律,且具有电推杆驱动的唯一的运动方式,在机械手爪闭合过程中,机械手爪完全闭合时所受夹持力最大。通过静力学分析与ADAMS软件运动仿真试验对机械手的虚拟样机进行了测试,以及加工出实验样机进行实验,能够测试达到预期效果。机械手爪的内部运输管道为3 cm,满足在气力输送过程中花朵的要求的直径。因此,研究结果表明了该末端执行器设计的合理性,证明了采用机械手爪采摘油茶花朵动作的可行性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
电子制作(2018年24期)2019-01-03 02:30:30
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
荣誉杂志(2017年7期)2017-08-23 08:05:59
中国核电(2017年1期)2017-05-17 06:10:00
机械工程师(2014年12期)2014-12-23 06:44:04
航天器工程(2014年5期)2014-03-11 16:35:53
制造业自动化(2011年10期)2011-01-19 10:56:24