基于视觉处理的全天候健康检测机器人研究
2022-02-14 13:21刘建杰邵一鸣李阳阳郭东旭
黑龙江科学 2022年2期
刘建杰,邵一鸣,李阳阳,郭东旭
(黑龙江科技大学,哈尔滨 150000)
1 健康检测机器人的技术方案
全天候健康检测机器人的视觉系统以raspberry作为主控核心处理器,机械结构由机械臂、履带、齿轮传动结构、支架组成。机械控制芯片使用的是stm32单片机,操作流程主要是通过视觉处理,由处理器内部的疲劳检测算法、表情识别算法及时对面向用户进行数据分析,并将分析结果通过串口通信技术使stm32单片机与处理器建立实时数据通信及时控制履带及传动结构运作,用户能够与机器人进行语音交互,实现人机互动。计算机算法结合机械结构控制及人机交互,实现了健康检测机器人的智能化、人性化。
结构方面包括机体,其顶端转动连接有头部,头部的外侧设置有智能语音人物交互机构。机体的前表面开设有存放槽,存放槽内侧壁设置有存放机构,机体底端固定安装有底座,底座前后两侧均设置了行走机构。存放机构包括电动推杆,存放槽的内腔后侧壁固定安装有电动推杆,电动推杆的输出端固定安装有推杆,推杆顶端固定安装有安装板,安装板顶端固定安装了两个立板,两个立板相对一侧之间均与两个存放架固定连接,上方存放架顶端固定安装有稳固机构。
行走机构包括第一传动轴,底座的前表面转动连接有两个第一传动轴,同一水平面上两个第一传动轴的外部均与履带传动连接,底座的左右两端均转动连接有活动杆,活动杆远离底座的一端固定安装有固定套,固定套内部固定安装有第二传动轴,第二传动轴的前后表面均设置有行走轮,活动杆的顶端转动连接有液压推杆,液压推杆的输出端转动连接于底座的外侧。
2 技术实现背景
现有的陪护机器人缺少可以存放急救物品的位置,当陪护老人出现意外突发状况时无法及时对其进行急救,且现有的陪护机器人在使用时只能适用于平坦路面或坑洼地面,导致使用过程中存在适应能力差等缺点。市面上的健康检测系统大部分使用的是通用检测健康数值指标(如心率、血压等),并没有对用户心理状况进行分析处理。基于视觉处理的全天候健康检测机器人可解决以上问题。
3 健康检测机器人的结构设计
设计的健康检测机器人具备适用性强和便于存储急救物品的优点,解决了陪护机器人存在的问题,能够通过表情识别算法、疲劳检测算法及时检测心理情况。

1-机体;2-头部;3-智能语音人机交互装置;4-存放槽;6-底座;7-行走机构;8-机器人手;31-摄像头;32-触屏电脑;33-语音接收器;54-立板;71-第一传动轴;72-履带;73-活动杆;76-行走轮;77-液压推杆 图1 整体外部结构图Fig.1 Entirety external structure
4 健康检测机器人的技术原理
4.1 机械视觉部分
通过python-opencv实现计算机视觉算法的实现。
4.1.1 疲劳检测算法
在不进行深度学习的情况下进行面部疲劳检测,对眼睛进行特征计算,实现对人物疲劳度的检测。具体技术原理是在确定人物眼睛位置后,计算机将眼睛分为6点,按如图2所示标号。
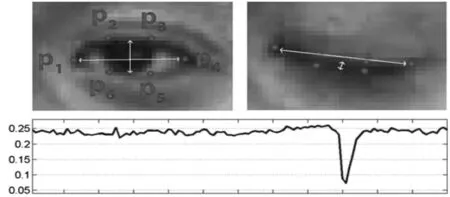
图2 疲劳检测眼部特征点Fig.2 Fatigue detection eye feature points
记录上述6点的位置,通过相应算法判断出眼部开闭状态,当眼睛处于睁开状态时,内部箭头长度偏长;眼睛闭上(疲劳状态)时,这个箭头会变短。但是由于观看的距离不同,单纯用高度来表示状态缺少参考比较,因此提出如下公式表示状态:
利用这个数据可以相对客观地表示眼睛状态,通过大量测试发现了一个统计结果,即当EAR远远小于0.25时,便是疲劳状态。
4.1.2 表情识别算法
人物表情识别算法涉及深度学习,本研究涉及的深度学习仅包括部分技术,通过TensorFlow深度学习,将搜集到的大量表情图片进行分类训练,通过50 000轮的测试后精确度将提升至95%。
4.1.3 人脸检测
人脸识别技术涉及图像预处理、色彩通道转换、图像特征提取。根据不同的特征提取,面部识别算法有很多种,主要是通过将面部分区处理,分别对不同区域进行特征提取,与相应人物图片进行对比。主要方法是通过haar级联分类器(Haar Cascade Classifiers,in the “datahaarcascades” folder)进行人脸检测。为了提高人脸识别系统的准确率,应用多种预处理技术对将要识别的图片进行标准化处理,并对预处理之后的脸部图片使用特征脸(PCA)进行人脸识别,对比数据库中已存在的脸部图像特征。
4.2 语音交互
语音识别处理设备会将收集到的语音波形进行特征提取和信号分析处理,此过程可去除杂质信息,将分析处理好的信息进行关键信息的特征提取。提取到的特征一般是多维向量形式,可通过声学模型中的算法对收取到的特征进行进一步处理。在解码阶段,计算机会按照语言模型及词汇表对处理完成的信息进行按序分析识别,根据关键意思进行排列。
5 结语
目前,陪护机器人的发展形成了较大的规模,市面上出现了较多的陪护机器人产品。但是,如何能够更加人性化地陪护老年人,做好老年人突发性疾病、紧急状况下的应急处理是急需解决的问题。健康检测机器人能够解决陪护机器人存在的问题,促进了养老陪护行业的发展。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
西华大学学报(自然科学版)(2022年3期)2022-05-13
农业装备与车辆工程(2021年8期)2021-08-28
起重运输机械(2021年3期)2021-03-27
南方农机(2021年1期)2021-01-20
兵器装备工程学报(2020年12期)2021-01-12
客车技术与研究(2020年3期)2020-06-23
汽车实用技术(2019年22期)2019-11-29
现代营销·理论(2019年10期)2019-09-10
汽车实用技术(2014年7期)2014-02-20