
基于激光跟踪测量的手术机器人位姿重复性评价
2022-02-14 06:03金建孙正捷杜堃陈维
中国医疗器械杂志 2022年1期
【作 者】金建 ,孙正捷 ,杜堃,陈维
1 浙江省医疗器械检验研究院,杭州市,310018
2 国家药品监督管理局生物医学光学重点实验室,杭州市,310018
3 浙江省医疗器械安全性评价研究重点实验室,杭州市,310018
0 引言
随着微电子、智能算法及远程通信技术的快速发展,医用手术机器人或采用机器人辅助技术的设备逐渐成为医疗器械创新领域的热点[1-3]。在新冠疫情期间,医用机器人在远程诊断及隔离治疗中也发挥重要作用[4-5]。当下对手术机器人的注册、监管,以及产品质量安全评价,是风险管控的核心问题。尤其是产品的核心性能指标,在行业标准暂未发布情况下,如何安全有效地进行检测,是检测机构研究的重点。
手术机器人的位姿重复性指标作为其产品注册及安全评价体系的核心性能指标,目前业内并无标准化的检测方法。位姿重复性一般指位置重复性和姿态重复性,对于外科手术机器人及微创机器人,末端器械的姿态控制影响创口切入点的方向,从而直接影响手术的效果[6]。对于导航式定位机器人,现有方法采用三坐标仪和光学定位模块,能有效进行精度验证[7-8]。
从医用机器人的定位精度考虑,三维测量臂配合四元数法,能实现对定位精度的评价,但没有体现机器人的姿态特性[9]。另外还有采用激光跟踪对机器人定位测量,没有考虑手术机器人的特殊性,无法表征对于手术器械的定位[10]。我们设计了一款与手术抓钳相匹配的三靶球载具,并安装在手术抓钳末端,用激光跟踪仪实时定位三靶球,以三靶球的中心坐标作为该器械的空间定位,并给出不同额定速度下的姿态重复性指标,分析其误差来源,结果表明本方法真实还原了手术器械的姿态特性,具有实际可操作性,能作为注册检测及安全评价的有效依据。
1 位姿重复性
1.1 位置重复性
手术机器人位置重复性是指末端执行器(一般为高频电刀、超声等手术器械)在同一指令下,重复多点之间的位置接近程度。在几何层面可以理解为包络所有测量点的球体半径。参考GB/T 12642—2013标准[11],位置重复性的计算见式(1):

1.2 姿态重复性
手术机器人姿态重复性是指末端执行器(一般为高频电刀、超声等手术器械)在同一指令下,重复多点之间的姿态角的接近程度。姿态重复性的计算见式(2):
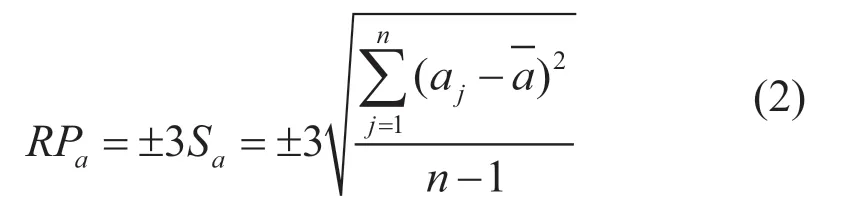
式中,Sa为姿态角a的标准差。同理可得RPb和RPc。
1.3 手术器械靶球治具
对于手术机器人的姿态重复性,直接测量机械臂末端法兰盘中心无法体现真实的重复性数据。考虑手术机器人使用的患者环境,配合手术器械的综合考量比较贴合实际且具有临床意义。通过激光靶球的定位,需要找到适配的器械治具,能有效装配在医用器械末端,同时在移动过程中,尽可能地避免靶球自身的偏移。我们设计了一款针对手术抓钳的靶球载具,其由三个靶球位组成,每个靶球工位底部安装有直径10 mm的圆形汝铁硼磁铁,用于固定0.5 in的激光反射靶球。四周采用四颗M3*0.5 mm平头螺丝固定,能有效固定在抓钳末端,从而实现其定位。

图1 靶球治具及装配Fig.1 Target ball fixture and assembly
2 试验环境及流程
2.1 试验环境
本次试验所用的为FARO Vantage-E6型激光跟踪仪,通过计量校准认证。测量范围为0~35 m,水平旋转角度360°,垂直旋转角度130°,测量精度为16 μm+0.8 μm/m ×测量距离,测量距离为1.2 m,此距离下的精度约为0.017 mm,跟踪仪置于三脚架上并保持稳定。试验在室内环境进行,地面平坦无陡坡,温度(23±2)℃,相对湿度(60±15)%,试验期间,被检样品和跟踪仪未见明显位移和振动。
待检样品为某外科手术机器人,其参数要求位置重复性<0.5 mm,姿态重复性<1°。其采用主从控制,末端执行器械主要为厂家配套设计腹腔内窥镜、高频电刀等,其重量一般固定,手术器械和靶球治具总重量远小于其额定负载。同时按照医用电气设备第1部分:安全通用标准(GB 9706.1—2007)[12]中对于悬挂系统的安全要求,按照最严格的要求,如果腐蚀、疲劳、老化可能会影响承载性能时,安全系数应不低于8。本次试验的手术机器人额定负载3 kg,手术抓钳和靶球工装总重量约为0.27 kg,安全系数约为3/0.27>10,因此,结合实际的使用场景,本次试验不考虑100%负载条件下的姿态性能。
2.2 测试流程
本次试验的机器人执行结构运行速度为10%、50%、100%额定速度,手术机器人的末端器械能够达到最大有效空间为试验范围,在此试验范围选取最大立方体,其各顶点及对角线交点作为试验的测试点。如图2所示,测试顺序为P1—P2—P3—P4—P5,依次往复循环30次,每个点各获得30组散点数据。
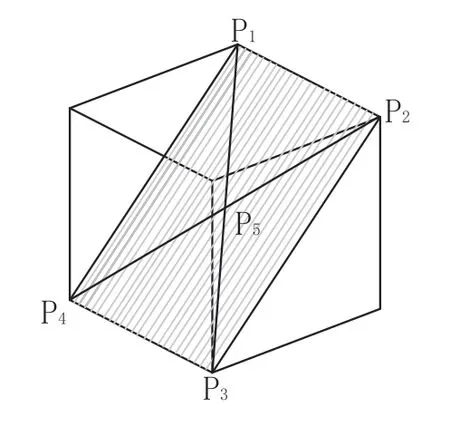
图2 选取的空间立方体及测试点Fig.2 Selected space cube and test point
各节点中心位置由三靶球的空间点取均值获得,姿态角为三靶球的空间点形成的平面与跟踪仪坐标系的X轴、Y轴和Z轴的夹角获得。对于位姿重复性而言,不必考虑机器人坐标系和跟踪仪坐标系之间的关系转化,这里坐标点及姿态角全部统一在激光跟踪仪坐标系下。首先激光跟踪仪测试系统搭建完成后,进入预热自校准,在预热完成后,跟踪仪能自适应校准测量参数,进行角度补偿和位置补偿。接着,根据机器人厂家末端器械的活动范围规划测量空间,保证测量范围能覆盖全部的手术活动空间。然后,按照给定的移动速度分别循环测试30次,分别记录测量点位,判断全部点位是否测量完成,最后按照位置重复性和姿态重复性计算方法,给出机器人在各节点的重复性参数,总体测试流程如图3所示。
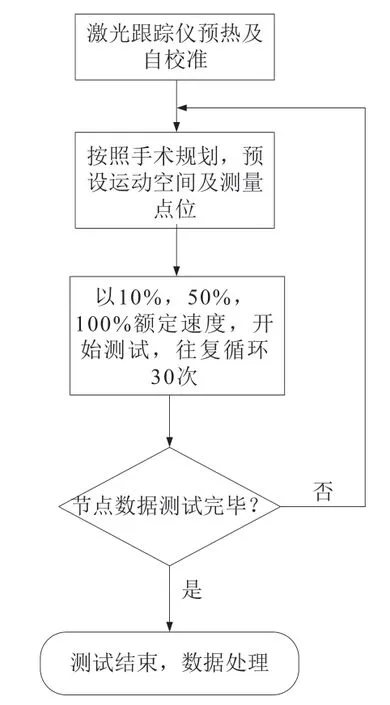
图3 测试流程Fig.3 Testing flow
3 实验结果分析
3.1 原始数据
50%额定速度的条件下,测量结束后,激光跟踪仪下的末端手术器械的实到位姿形成了P1~P5的五个集群,图4为P1点的散点图。每个集群包含30组数据,分别是30次循环试验的结果。另外图中显示,部分空间存在奇异点,其坐标数据明显偏离正常值,给最终测量值带来干扰。总体上,每次循环的测量散点都包络在一定范围内,一定程度上反映真实测试结果。五个集群的中心点坐标分别为:P1(860.86,-192.69,-235.10),P2(767.29,-315.57,-160.08),P3(963.70,-265.96,-142.64),P4(932.23,-106.93,-296.41),P5(739.42,-122.07,-310.34)。
在原始数据基础上,可得各集群的均值坐标、均值姿态角,从而求得手术器械在各点的位置重复性和姿态重复性。最终重复性指标如表1所示,按照产品技术要求,被测样品的位置重复性<0.2 mm,姿态重复性<0.8°,符合其本身重复性参数。
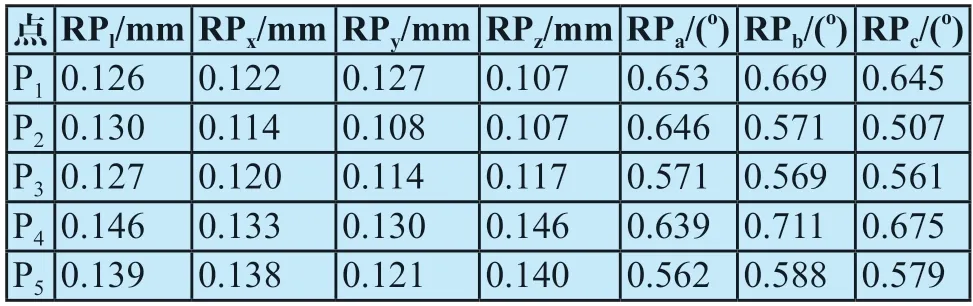
表1 P1~P5的位姿重复性Tab.1 Pose repeatability of P1~P5
3.2 不同速度限定下的重复性数据
按照上述试验流程,分别测试(10%、100%)额定速度下的各组数据,与50%额定速度相比较,所得的位置重复性和姿态重复性如图5所示。可以发现,10%额定速度下的重复性数据明显好于50%和100%。需要指出的是100%速度下,位置重复性RPl为0.185 mm,姿态重复性RPa为0.848°,偏离程度明显提升,对重复性参数存在较大影响。
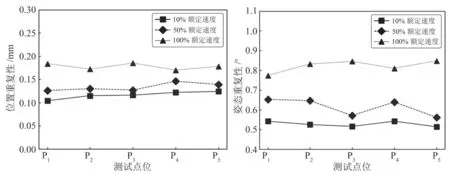
图5 10%、50%、100%速度下的位姿重复性Fig.5 Position repeatability at 10%,50% and 100% speed
移动速度影响位置稳定时间及超调量,从而影响其准确、平稳地停止在设定位置的能力。此外,高速运动还会降低靶球治具的稳定性,带来相对偏移误差。对于医用机器人位姿重复性性能指标,可以按照其手术设定的移动速度,或者按照使用说明书中明确规定的移动速度来进行考量,以期获得更好的一致性效果。如果企业未进行相关规定,则需按照100%额定速度的最不利条件进行。
3.3 影响因素
对于重复性测量,靶球坐标统一于激光跟踪仪坐标系下,因此不存在坐标系转化引起的误差。检测过程中要保持实验环境的稳定,包括温湿度、光强度、无抖振等,确保激光跟踪仪能准确定位靶球。其次,测量空间需要在激光跟踪仪的最佳测量范围内,避免边缘干扰,产生仪器布局上的误差。另外,明确末端器械的移动速度也是测量的前提工作,以获得数据结果的一致性。最后,靶球治具与手术器械的无相对位移,无结构形变,对于常用的手术机器人末端器械,如抓钳、高频电刀、超声刀等,设计相适配的靶球治具也是一项重要的工作。
4 结论
对于手术机器人的位姿重复性评价,不仅仅是考虑机器人本体,更是整个机器人系统的考量。在患者环境内,尤其是搭配各类手术器械使用的场景,结合机器人末端手术器械的检测更具真实性且含临床意义。基于激光跟踪测量,依照手术器械设计了相适配的激光靶球治具,并分别测得10%、50%、100%额定速度下的原始数据,经过节点数据分析并比较,能获得被检样品在有效活动空间内的位姿重复性指标,为手术机器人的产品注册及安全评价提供真实有效信息。
需要特别指出,手术机器人的安全特性及风险管控远高于普通工业机器人,其临床使用中的轨迹姿态也更复杂多样,因此在对手术机器人进行性能测试时,需更多地从患者安全出发,末端器械作为直接和患者接触的应用部分,不仅仅是位姿重复性,其移动轨迹、位置超调量、位置稳定时间及检测方法等都是今后研究的重点。
猜你喜欢
健康体检与管理(2022年4期)2022-05-13
昆钢科技(2021年2期)2021-07-22
世界最新医学信息文摘(2020年98期)2021-01-06
世界最新医学信息文摘(2020年88期)2020-12-24
现代信息科技(2020年22期)2020-06-24
临床医药文献杂志(电子版)(2020年95期)2020-05-06
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
考试周刊(2016年94期)2016-12-12
