
一种基于人体骨盆中心的静态平衡能力评价方法
2022-02-14 06:03夏明莉郭帅杨坚王葳
中国医疗器械杂志 2022年1期
【作 者】夏明莉,郭帅,杨坚,王葳
1 上海大学工程训练国家级实验教学示范中心,上海市,200444
2 上海市徐汇区中心医院,上海市,200031
3 上海市医疗器械检验研究院,上海市,201318
0 引言
临床研究表明,脑卒中、脑外伤、帕金森病等患者的下肢都存在行走与平衡功能障碍的问题,平衡功能失调会直接导致跌倒风险的增加,威胁人体的基本安全。在下肢障碍的相关临床治疗及医师助健过程中,对平衡障碍患者的平衡能力进行准确的评估意义重大,通过评估能够准确地掌握这些患者平衡能力丧失的严重程度,从而针对性地给出康复方案,保证在进行康复治疗的同时同步评价患者的康复效果,循序渐进地促进平衡障碍患者的康复[1]。
评估人体平衡能力的方法有:临床观察法、量表评估法、仪器测量法[2]。其中,临床观察法是:医生或康复师直接通过观察受试者在不同条件下的平衡表现作出评定[3]。这种方法的优点是应用简单,无需借助仪器就能粗筛患者,缺点是过于主观,没有将标准定量化;量表评估法是根据平衡量表作出评定,例如Berg平衡量表、Tinetti步态和平衡量表、Fugl-Meyer平衡功能量表、Brunel平衡量表等[4-5]。量表评估法这种方法的优点是操作简便、无需借助仪器,缺点是每一项评分标准存在界限模糊,容易产生天花板效应,从而影响患者平衡评估的精准度;仪器测量法是随着计算机技术、传感技术和电子技术等的发展,定量测定仪器被应用于平衡能力的评测。Terekhov在1976年最早开始使用压力传感器采集人体压力中心COP(center of pressure)位置进行人体平衡能力分析[6]。现在,有学者使用任天堂Wii平衡板提取的COP轨迹进行人体静平衡测评[7],也有学者使用德国Technobody平衡测试训练仪,Tetrax平衡训练系统等平衡仪直接进行人体平衡测定;或是学者任研研等基于压力传感器的基础上设计平衡训练仪[8],学者宋桂芸等[9]采用Active Balancer EAB-100平衡检测仪对提取的平衡参数进行权重分配建立综合评价值去评价下肢功能障碍者平衡情况。目前学者大多采用压力传感器获取COP,并提取COP相关参数:轨迹长度、摆幅、重心分布、动摇比等来区别平衡能力好坏程度。压力传感器的优点是能准确获取人体压力中心的位置和轨迹,但是缺少了人体冠状面的平衡参数。故本研究首次采用最大倾斜角作为冠状面的平衡参数。为准确有效地评估人体静态平衡能力,本研究设计对照实验,借助康复机器人iReGo获得人体骨盆中心的轨迹变化,采用平衡算法计算出平衡参数,参数包括平均摆幅、平均摆速、最大摆幅、轨迹长度、包络面积、最大倾斜角。用SPSS统计学软件对这些参数进行主成分分析建立综合评价指标,进而对平衡能力量化评定。
1 方法
1.1 系统设计
本研究的实验设备为下肢康复助行机器人iReGo[10],如图1所示。康复机器人iReGo骨盆减重机构,如图2所示。力传感器和电位计分别取得机器人x、y、z向(分别对应人体横面、矢状面、冠状面)上的位移、角度变化数据。

图1 下肢康复助行机器人iReGoFig.1 Pelvic lower limb rehabilitation walking robot iReGo
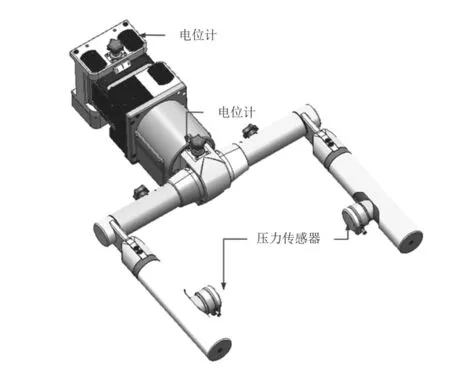
图2 骨盆减重机构Fig.2 Pelvic weight reduction mechanism
通过对传感器、电位计输出的信号进行处理,可得骨盆中心的实时位置。骨盆中心点为(X,Y),骨盆中心初始点为(X0,Y0)。
y向位移变化量:

其中,F1为骨盆减重机构左边力传感器输出数据;F2为骨盆减重机构右边力传感器输出数据;K为骨盆减重机构传感器旁的弹簧,两传感器使用同一刚度线性弹簧。
x向位移变化量:

其中,θ为x向电位计输出数据,l为骨盆机构四杆机构固定短边长度。
z向角度变化量:

其中,θ为z向电位计输出数据。
1.2 系统验证
为验证康复机器人iReGo骨盆减重机构上的传感器获取的参数有效性,现利用动作捕捉系统进行验证分析。实验采取对照实验,康复机器人置于动作捕捉系统的视野范围内,受试者首先穿戴康复机器人上的腰带,随后将刚体佩戴在左右腰部外侧上,动作捕捉系统根据两刚体位置关系算出骨盆中心位置。
在30 s内动作捕捉系统与康复机器人同时采集数据,如图3所示。通过对比两组数据间的相关性和差异性验证康复机器人骨盆机构上传感器获取的数据是否有效。

图3 动作捕捉系统验证方法Fig.3 Method for validation of motion capture systems
1.3 实验方案
人体静态平衡能力测定实验采取对照实验。实验组患有中风、偏瘫等下肢功能障碍,患者均来自上海岳阳医院康复科:男性12例,年龄(50±10)岁,体质量(70±10)kg,身高(170±8)cm;女性8例,年龄(50±8)岁,体质量(55±10)kg,身高(160±6)cm,患者生命体征稳定,无显著认知障碍,能独立站立一分钟。对照组为下肢运动功能健康者20名。
实验内容为受试者成功穿戴iReGo腰带后,双手自然垂下,双脚分开45°~60°站立,双眼目视前方,如图4所示。准备工作完成后,点击屏幕上iReGo平衡系统软件上的开始按钮,启动软件采集骨盆中心轨迹数据,iReGo平衡系统软件实时显示受试者的骨盆中心位置,如图5所示。整个实验过程为30 s。实验过程中不可与人交谈,不可被外力因素打扰,否则将重新进行实验。采集结束后,受试者解开腰带。

图4 患者实验过程Fig.4 Patient experiment process
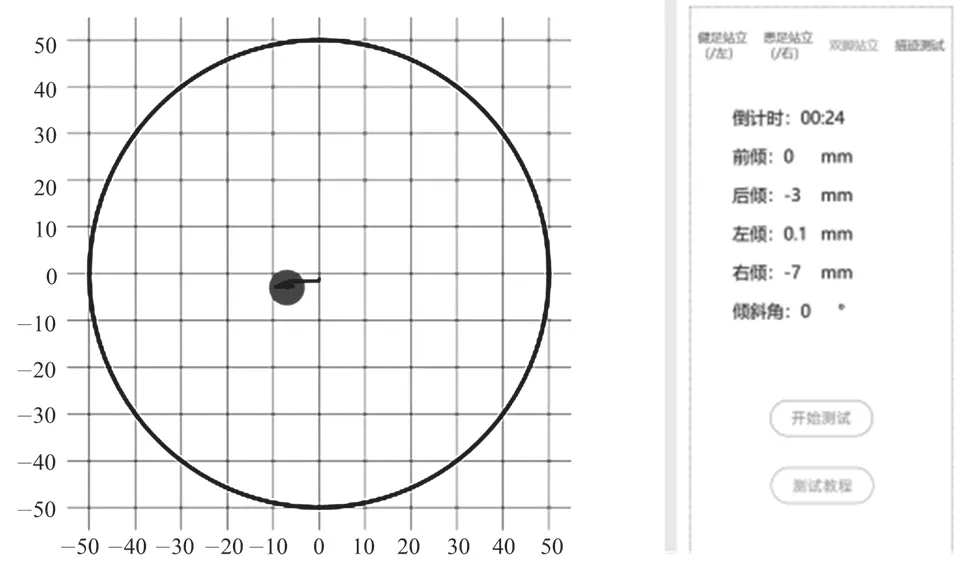
图5 骨盆中心轨迹Fig.5 The trajectory of the center of the pelvis
1.4 评价参数
根据骨盆中心轨迹分析,取以下9个参数为人体静态平衡评价参数。
(1)平均摆幅 :骨盆中心距离骨盆中心初始点的平均距离。
本研究将平均摆幅分为x、y向:
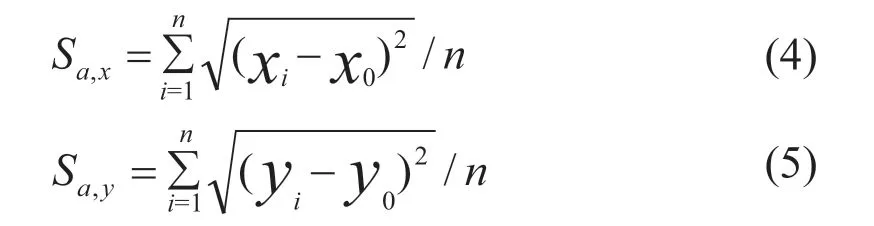
其中,(Xi,Xi)为骨盆中心实时点;(X0,X0)为骨盆中心初始点;Sa,x为x向平均摆幅;Sa,y为y向平均摆幅。
(2)最大摆幅:骨盆中心距离骨盆中心初始点最大距离。
本研究将最大摆幅分为x、y向:


其中,Sx为x向摆幅;Sy为y向摆幅;Sm,x为x向最大摆幅;Sm,y为y向最大摆幅。
(3)轨迹长度:骨盆中心移动轨迹的长度,即相邻骨盆中心点距离的总和。

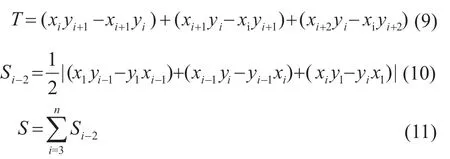
(4)包络面积:骨盆中心轨迹点所包围的面积。
包络面积算法采用学者周文科凸包点计算方法[11]:先将点集(整个实验过程中的点的集合)中各点按与x轴的夹角大小进行排序,再通过矢量叉积法去除凹点,得到任意简单多边形凸包,最后通过组合三角法计算包络面积。T为凹凸点判别变量,T>0,则(xi+1,yi+1)为凸点;T<0,则(xi+1,yi+1)为凹点;T=0,则视为中性点,删去。计算面积,组合三角法累加S面积即为包络面积。
(5)平均摆速:单位时间内骨盆中心摆动的速度,表示身体摆动的快慢。
本研究将平均摆速分为x、y向:
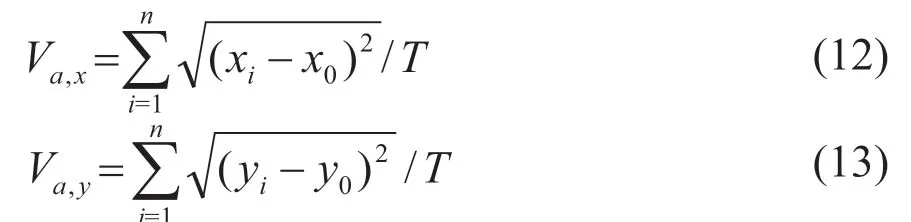
其中,Va,x为x向平均摆速;Va,y为y向平均摆速;T为人体静态平衡实验时长。
(6)最大倾斜角:身体倾斜时与人体横断面的最大夹角。

2 结果
2.1 系统设计信度分析
康复机器人z向与动作捕捉系统同时采集的数据,通过Matlab计算两者间的相关性R=99.98%,差异性P=0,最大误差为0.4o,数据高度相关。机器人x向相关性R=99.98%,差异性P=0,最大误差为3.8 mm,数据高度相关。机器人y向相关性R=98.57%,差异性P=0,最大误差为2.5 mm,数据高度相关。如图6~图8所示。
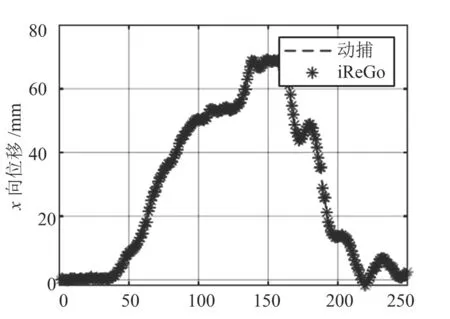
图6 数据对比(x向)Fig.6 Data comparison x direction)
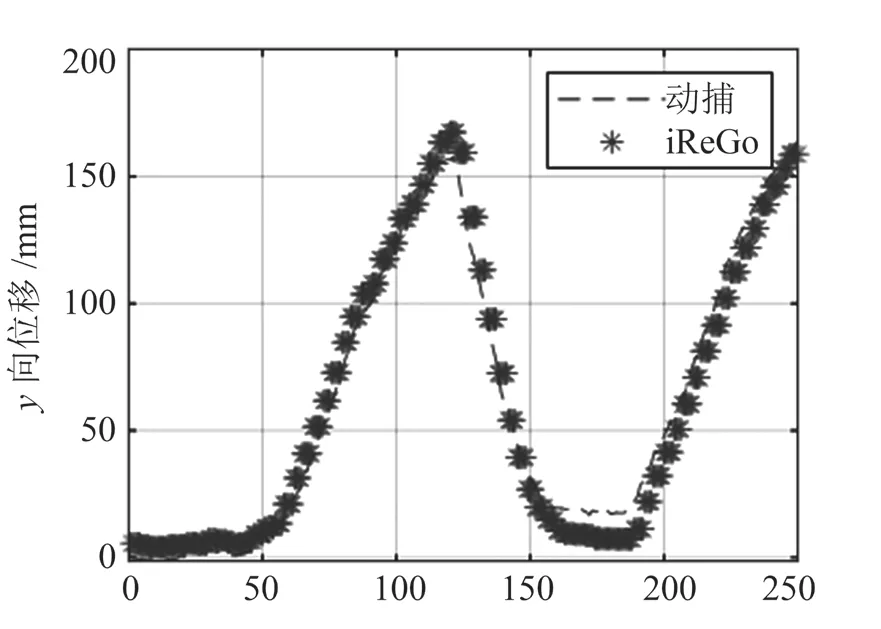
图7 数据对比(y向)Fig.7 Data comparison (y direction)
通过与动作捕捉系统获取的数据对比证明基于iReGo骨盆减重机构中的传感器获取的参数具有很高的可靠性和有效性。
2.2 评价参数及差异性分析
在研究中,不同的仪器和不同的平衡姿态下有不同的平衡指标。任何单一的评价参数都不能完全表达一个人的静态平衡,理论上,参数越多,更能客观描述一个人的平衡情况。但是,参数越多,信息冗余的可能性越大,信息混合越多,计算成本就越高。因此,我们需要一个方法,用一个综合值来表示所有参数。首先,分析上述平衡参数在对照组和试验组之间的差异,剔除对平衡评价无效的参数。本研究现基于SPSSAU平台,采用独立样本t检验分析方法,比较对照组与病例组各参数的差异。得出差异结果,如表1所示。
从表1可知,利用t检验去研究实验组和对照组关于轨迹长度L,包络面积S,平均摆幅Sa,x,平均摆幅Sa,y,最大摆幅Sm,x,最大摆幅Sm,y,平均摆速Va,x,平均摆速Va,y,最大倾斜角θ共9项的差异性,从表1可以看出:不同组别样本对于这9项参数均呈现出显著性差异(P<0.05),意味着这9项评价参数评估人体静态平衡能力有效,同时也可以区分下肢功能好坏。
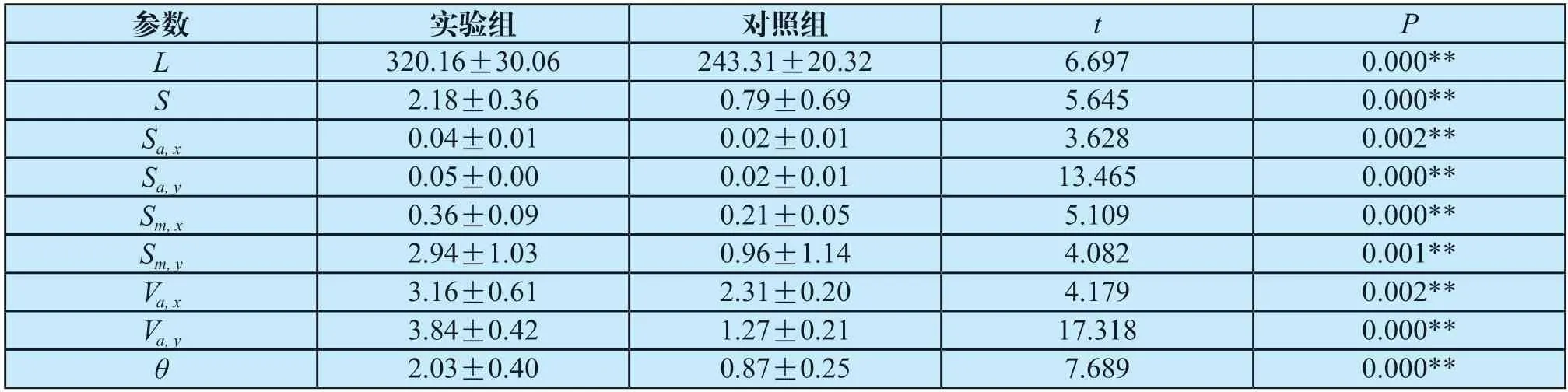
表1 对照组和实验组评价参数差异性分析Tab.1 The difference of evaluation parameters between control group and experimental group was analyzed
2.3 综合评价值
上述平衡参数之间存在着一定的信息杂糅,需要建立一个综合评价值代替原来多个参数,来评价人体静态平衡能力,使参数结果量化。本研究选用主成分的分析法对有差异性的平衡参数进行主成分分析:去除信息冗余的因子,根据各参数的权重提炼成新的因子,对新的因子线性加权建立综合评价值作为评价指标。
通过上小节的差异性分析可知,9项参数在实验组和对照组具有明显的差异性。基于此,使用SPSSAU平台的主成分分析法建立综合评价值以代替上述9个参数评价人体静平衡能力。
以对照组为例,将表中数据整理成标准归一化后的矩阵进行主成分分析,表2为对照组主成分分析后的方差解释率表,表3为成分得分系数矩阵,即提取的各因子所占的权重。

表2 方差解释率Tab.2 Interpretation rate of variance
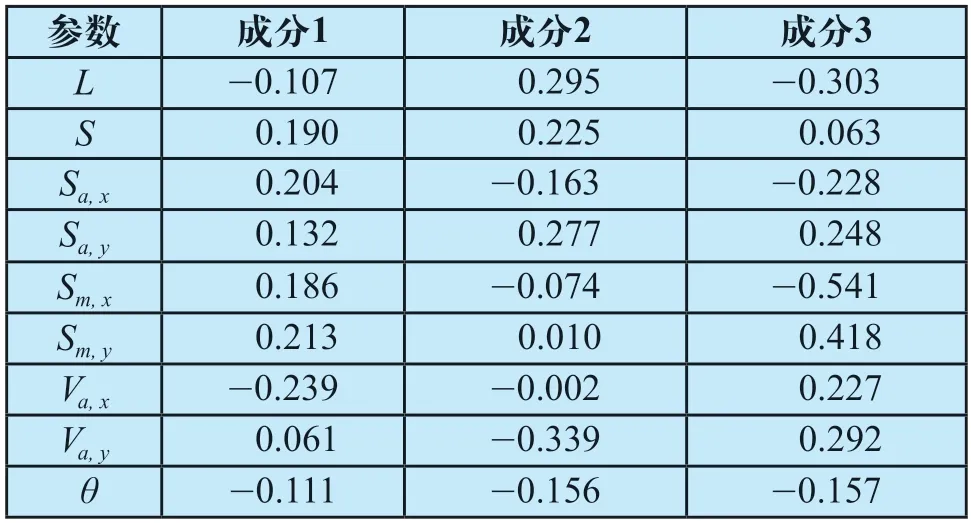
表3 成分得分系数矩阵Tab.3 Component score coefficient matrix
由表3可知,主成分分析共提取了三个主成分,且特征根值均大于1。这三个主成分的方差解释率分别为42.874%、28.815%和13.244%,累积方差解释率为84.933%,其对应的加权方差解释率,即权重分别为:42.874/84.933=50.48%;28.815/84.933=33.93%;13.244/84.933=15.59%。
根据表中各组分1(C1)、2(C2)、3(C3),计算公式如下:
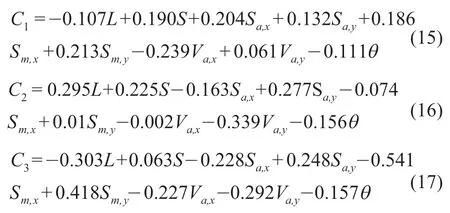
因此,综合评价值的计算公式为:

实验组的综合评价值计算方法同上,对照组综合评价值为0.383±0.038,实验组综合评价值为0.875±0.136。
3 讨论
衡量人体静态平衡能力的方法有很多。除了传统的Berg量表评定,目前大多数学者采用足底压力传感器来检测足底压力分布。通过传感器获得压力中心位置(x,y)后,根据压力中心的变化计算出压力中心的相关参数,从而评价人体的平衡能力。但是由于足底压力传感器的限制,只能计算出x、y平面(人体横断面位移)的参数,提取的COP相关参数包括重心轨迹长度、单位面积轨迹长度、平均摆动幅度、重心分布比等。然而,人体静平衡是一个三维的整体平衡,因此利用人体冠状面平衡数据来评价人体静平衡能力是非常必要的。在本研究中,iReGo骨盆减重机制的三个传感器可以测量人体三个平面的数据。本研究将人体在冠状面上的最大倾斜角作为平衡参数之一,更全面地对人体平衡能力进行评价。平衡参数的选择是平衡能力评价的基础。由表1可以看出,本研究选择的参数在对照组与病例组间均存在显著性差异(P<0.05)。因此采用最大倾斜角作为评价指标是正确的,实验结果为该指标的应用提供了客观依据。本研究尝试运用主成分分析法计算综合评价值,得到的综合评价值与人体平衡功能的特征相一致,能够正确反映被测试者主体平衡功能的强弱。
4 结论
本研究讨论了一种基于骨盆中心的人体静态平衡能力评价方法。选取轨迹长度、包络面积、平均摆幅(x方向、y方向)、平均摆速(x方向、y方向)、最大摆幅(x方向、y方向)、倾斜角作为平衡能力的评价参数。分析了对照组与实验组参数存在差异后,利用主成分分析方法对选定的评价参数进行融合,得到独立的主成分因子。最后,根据各主成分因子的方差贡献率确定各主成分因子的权重,从而得到评价人体静态平衡能力的综合评价值。通过对实验组与对照组的平衡功能进行测定和评估,对照组综合评价值为0.383±0.038,实验组综合评价值为0.875±0.136。结果说明,基于骨盆中心的静态平衡评价方法能够定量客观地去评价人体静态平衡能力,当被测试者综合评价值在实验组范围(0.739~1.011)内时,则说明受试者存在平衡功能障碍,须进一步进行平衡康复训练,在对照组(0.345~0.421)范围内时,则说明受试者下肢平衡状态正常。本方法在检测患者是否存在平衡功能障碍、明确患者下肢平衡康复情况以及预防跌倒等方面具有较好的临床应用潜力。
本研究有效地解决了观察法和量表评价法无法定量分析的问题。但仍有很多进一步的研究工作:首先,研究与人类静态平衡有关的视觉和前庭感觉带来的影响;其次,找到更客观有效的评价指标,使平衡功能障碍的检测更加科学和有效,更正确地对平衡能力进行评估;最后是扩大样本量,使区分对照组和病例组的综合评价值范围更加有效跟精准,并促进其评价标准的建立,从而使静态平衡功能的评价更加科学有效。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
小哥白尼(趣味科学)(2022年1期)2022-04-26
大科技·百科新说(2021年10期)2021-12-31
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
小猕猴学习画刊·下半月(2019年6期)2019-08-13
幸福·健康版(2018年4期)2018-04-20
汽车工程学报(2017年2期)2017-07-05
家庭百事通·健康一点通(2017年5期)2017-05-19
北京航空航天大学学报(2016年7期)2016-11-16
