
新型股骨颈骨折空心螺钉置入导向器的研制
2022-02-14 06:03吴江红牛升波杨桓李磊肖良许硕贵
中国医疗器械杂志 2022年1期
【作 者】吴江红,牛升波,杨桓,李磊,肖良,许硕贵
1 海军军医大学第一附属医院(长海医院),上海市,200433
2 海军军医大学 海医系,上海市,200433
0 引言
股骨颈骨折是急诊骨科常见疾病,年轻患者多由于高能量损伤导致[1],老龄患者多由于低能量损伤导致。随着交通业、建筑业的迅猛发展和社会老龄化的不断加剧,股骨颈骨折的发生率也不断上升[2],给家庭、社会以及医院带来了沉重的负担。股骨颈骨折治疗方案包括:保守治疗、内固定术、外固定术以及半/全髋关节置换术等。其中,通过内固定进行骨折修复,从而尽可能保留自身的髋关节功能的治疗方式最易为患者接受[3-4]。在众多内固定器械(空心螺钉、动力髋螺钉、滑动髋螺钉、股骨近端解剖板、股骨近端髓内钉、Gamma钉等)中,空心螺钉应用最为广泛[5]。为保证骨折固定具有良好的力学稳定性,同时在骨折断端动态加压[6],一般采用3枚空心螺钉按照“滑动加压”的原则进行置钉和固定。目前认为,上方2枚、下方1枚的“倒三角形构型”具有更好的机械稳定性[7],既能对抗强大的剪切力又能提供更好的把持力和抗拉力作用[8]。
但目前,临床上股骨颈骨折空心钉的置入多在术中C臂机透视下进行,术中频繁的透视不仅给病人和医生带来辐射损害,而且反复调整C臂机的角度和位置会增加术区污染的风险[9-10]。此外,这种置钉方式的精确度也不高,常需多次调整导针的穿刺角度或位置,这些额外的穿刺尝试可能会导致股骨头血供以及颈部骨质的破坏,从而引发股骨头坏死、螺钉把持力不够而退钉等并发症[11]。所以,如何才能既准确又微创地进行螺钉置入,同时又能减少手术中患者及医生所受到的辐射成为一个亟待解决的难题。
1 解剖学基础
从图1的解剖标本观察中,我们发现:①股骨颈是一个不规则的柱形结构,且位于股骨近端前方的骨皮质平面比较平坦;②该平面与股骨颈中轴线近似平行;③正常情况下,股骨颈存在12o~15o的前倾角。结合以上特点,我们通过数学模型构建,确定了一种股骨颈骨折空心螺钉置钉导向器的设计思路;经过反复实践和多次改型,最终研制出导向器。
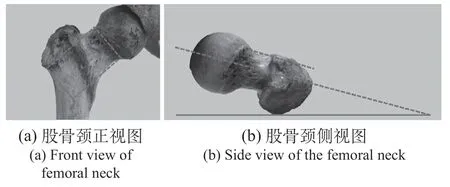
图1 股骨颈解剖特征Fig.1 Anatomical features of the femoral neck
2 导向器的组成及原理
导向器设计图及实物图,如图2所示。该导向器主要由2个定位套筒、1个导向套筒、1个定位梁、1个导向梁、1个调节滑块以及相应的锁定紧固装置等构成,通过调节螺丝可以使导向梁相对于定位梁在SI方向(上下方向)上移动,导向套筒可在导向梁上按AP方向(前后方向)方向移动。
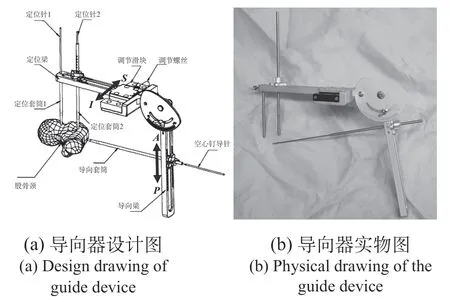
图2 导向器设计图及实物图Fig.2 Design drawing and physical drawing of the guide device
其主要定位原理如图3所示:L1为定位套筒1的高度,该高度为已知值。L2为定位套筒2的高度,可通过其上的刻度读出。L3为定位套筒1和定位套筒2中心线之间的距离,可通过定位梁上的刻度读出。置钉梁与定位梁之间的夹角α可通过L1、L2和L3求解。计算式如下:
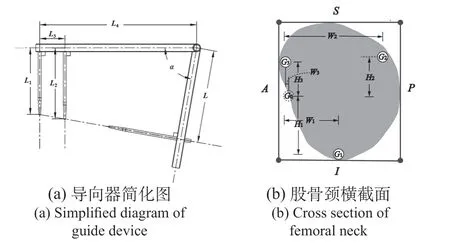
图3 导向器原理解释图Fig.3 Schematic explanation of the guide device

L4为定位套筒1到定位梁与导向梁旋转轴心的距离,该尺寸为已知值。
L为导向套筒到定位梁与导向梁旋转轴心的距离。该距离可以通过已知的L1、L4和α角度求解。计算式如下:

经过以上计算可以获知α角度和L值。
转动导向梁至角度指示板指示角度为α角度时,旋紧羊角螺丝紧固锁定导向梁与定位梁的角度位置。沿导向梁滑动导向套筒至刻度指示距离为L时,此时的导向套筒位于股骨颈前缘骨面。
以此为基准位置G0,将定位套筒沿方向P(后方)移动W1,沿方向I(下方)移动H1,此时导向套筒对应的位置即为第1根空心钉置入位置G1。
同样,将定位套筒沿方向P(后方)移动W2,沿方向S(上方)移动H2,此时导向套筒对应的位置即为第2根空心钉置入位置G2。将定位套筒沿方向P(后方)移动W3,沿方向S(上方)移动H3,此时导向套筒对应的位置即为第3根空心钉置入位置G3。
其中,W1、W2、W3、H1、H2、H3的具体数值由术前或术中X线片可量取,或参照经验值选取。通过以上方法,该新型导向装置可以精确测算出各个导针进针点的位置,从而完成精准置钉。
3 实验测试
3.1 实验方法
采用该新型导向器对5例尸体标本左右两侧股骨颈进行空心钉导针(2.5 mm克氏针)置入,操作步骤如下:
(1)在股骨颈前方体表放置克氏针,通过透视正位片调整克氏针的位置,使其与股骨颈中轴线重合,并标记该克氏针位置;在转子间嵴两侧各选取一点作为两定位套筒的进针点A、B;
(2)于A、B两点处分别垂直于体表打入定位针1、定位针2;
(3)沿着定位针1、2分别插入定位套筒1、定位套筒2,直至到达骨面,然后将定位套筒2锁定;
(4)根据定位套筒2及定位梁上的刻度计算定位梁与导向梁的角度α及导向套筒到定位梁与导向梁旋转轴心距离L,调节导向器位于基准位置G0(即导向套筒位于两定位套筒头端的连线上);
(5)根据参考值,分别在AP方向上和SI方向上调节W1、H1,规划出第一个导针的位置,透视正、侧位确认位置正确后打入第一个导针,如透视发现位置存在偏差,可再次进行相应调整;
(6)采用相同的方法打入第2、3根导针;
(7)取下定位器,透视检测,完成置钉。
3.2 结果分析
实验对5具尸体标本左、右两侧共10例股骨颈进行了空心钉导针置入,实验过程顺利。置入导针平行度评分借鉴Hamelinck等的方法[12],通过采集正、侧位图像,分别测量导针两两间的角度(0≤角度<3o,计4分;3o≤角度<6o,计2分;角度≥6o,计0分;分数累计越高,平行度越好),平均得分为19.2±3.8分。从实验开始至最后一根导针确认穿刺成功为止,记录手术总共需要的透视次数,平均为15.1±2.2次。导针穿刺次数定义为:所有导针穿刺的次数和,每一次退出导针以纠正进针点或进针方向都被记录为一次穿刺,平均为4.8±1.2次。
3.3 结果讨论
国内外研究者针对股骨颈空心钉置钉不精准、辐射暴露量大的难题,进行了大量尝试,设计出多种置钉方法。这些方法可归纳为:刺探股骨颈定位[13]、透视动态定位[14]、体表投影定位[15]、计算机导航[16-19]和导向器/定位器定位[20-22]等几类。前三种方法虽然操作简单,不需要其他特殊辅助器械,但是穿刺难度依然很大,穿刺的精度仍然得不到保障。手术导航系统(surgical navigation system,SNS)是通过影像联合定位技术,在手术中达到持续的引导作用。这不仅能够极大地减少了术中射线辐射量[16],而且定位精确,固定可靠,操作安全有效[17]。但由于此项技术价格昂贵、操作复杂、学习曲线长,需要有较全面的知识及立体空间感,因此限制了其在基层医疗单位推广[18-19]。
导向器/定位器定位方法较前几类方法,更为经济、实用。YIN等[22]发明了一种导向器,使用时,先通过固定针将其固定于股骨干上,然后借助体表定位克氏针和透视将导向套筒调整到合适位置进行第1根导针置入,其后再利用平行导向器完成其余2枚导针置入。为增大3枚导针置入的平行度,YUENYONGVIWAT等[23]设计了一种新的平行导向器,在第1根螺钉有效置入后,可用于方便、快捷地引导其余2枚导针的置入。这类导向器/定位器在一定程度上提高了螺钉植入的精确度,避免了多次钻孔损伤股骨颈血供,同时减少了手术时间和透视次数;但仍存在使用不方便、导向不够精准的缺点,有一定局限性[21-23]。
研制的新型导向器是基于“股骨颈前方的骨皮质平面相对平坦,且与股骨颈中轴线近似平行”的解剖学特点,结合“两点一线”的几何学原理设计和研发的。理论上,其精度不仅不受患者体位影响,而且能有效规避股骨颈干角和股骨颈前倾角等因素干扰。相对于文献报道[12,22-23],实验结果显示:本导向器能提高置钉精确度、降低置钉尝试次数和辐射暴露。但我们的研究目前仍存在以下不足:三根导针所需要移动的距离(W1、W2、W3、H1、H2、H3数值)只能依靠术者经验或透视下确认。下一步,我们将通过对股骨颈相关解剖数据的测量和分析,得到更准确的经验数值或求算方法,从而为导向器应用于临床提供更有益的参考,使更多的股骨颈骨折患者从中获益。
猜你喜欢
中国伤残医学(2022年14期)2022-12-23
第二军医大学学报(2022年9期)2022-11-18
中国设备工程(2022年19期)2022-10-12
生物骨科材料与临床研究(2022年4期)2022-08-18
临床骨科杂志(2021年6期)2022-01-08
临床骨科杂志(2021年5期)2021-12-23
装备维修技术(2021年20期)2021-03-29
上海建材(2020年4期)2020-12-15
中华养生保健(2020年5期)2020-11-16
安徽医科大学学报(2020年10期)2020-10-14
