
罐笼动态检测系统研究与应用
2022-01-18 09:58梁云峰李晓林
大科技 2022年4期
梁云峰,李晓林
(中煤西北能源有限公司,内蒙古 鄂尔多斯 017200)
0 引言
目前,我国主要用于检测罐笼运行位置的系统为电控系统,该系统使用编码器或显示器对卷筒旋转带动深度进行计算,借此进行罐笼位置的判断。但电控系统无法判断实际位置,因此若罐笼在矿井内出现卡罐问题时,电控系统无法实时检测此问题是否出现。若此时处理不当,则会导致钢丝绳松弛进而引起罐笼滑落事故,由此发生罐笼坠井等此类对相关矿井工作人员生命安全造成严重威胁的事故。例如在2012 年的山东临沂,某矿洞就出现了相当惨烈的事故,造成了13 人的死亡。
经过专组调查发现事故的原因就是副井罐笼钢丝绳断裂,导致罐笼坠落井底。如果能够有更先进的技术提前预判到事故的发生,就完美避免了此等人间惨剧。为了矿业的可持续发展,出于对矿井员工的生命负责的态度,从以人为本的核心科学理念出发,改进罐笼动态检测系统技术,研究罐笼动态检测系统技术显得尤其有必要。当今矿业内部虽然对罐笼动态检测的电控系统进行了安全性优化,但因罐笼实际位置判断问题难以解决,因此松绳保护措施仅对异常罐笼位置提供了安全保护,无法保障检测出罐笼在矿井内的实际位置状态。因此本文将提出一些理念对罐笼动态检测技术进行一些优化,希望能够为我国罐笼动态检测系统技术贡献出微薄之力,为矿业行业发展保驾护航。
1 罐笼动态检测系统研究的背景与意义
1.1 罐笼动态检测系统研究的背景
作为能源生产大国,我国的煤炭资源一直在世界各国中名列前茅。我国原煤产量在2007 年就可以达到25.23 亿t,平均每年我国原煤产量涨幅能够达到12.5%,这是一个惊人的数字。由此我们可以发现,我国煤炭资源将会长期占领我国能源供应领域,但与之相对应的是我国矿难的发生频率,虽然随着时代的发展和技术的改进,国家政策上的重视,也没能彻底改变我国矿产事故上一些问题,每年因为矿难死去的工人不计其数,给无数家庭带来了黑暗,同时也给国家造成了严重的损失。
一个矿井的运作少不了矿井提升设备。矿井提升设备负责地面与井下的连接,负责运载井下开采出来的矿物及石块,同样也肩负着运输工作人员与矿业相关设备的重任,由于其使用足够频繁,设备本身也足够精巧复杂,矿井提升设备在工作过程中总会出现各种各样的问题,造成矿井出现各种事故,例如坠井、停产等,严重损害了矿业发展前景,也是矿业不稳定的安全隐患之一。一个完整的矿井提升设备构成主要有6 个部分负责[5]。
矿井提升设备按照提升容器分为罐笼和箕斗两大类型,箕斗仅仅只能运输输送矿物这一类,罐笼不仅可以运输输送矿物类产物,还可以运输承重其他的一些工作材料和工作人员。因此各大矿井对于矿井提升设备的选择还是选择罐笼偏多,因此对于罐笼的安全技术检测就更为重要,因为这涉及人员的安全问题。随着我国矿产矿业的不断发展,随着我国在矿业技术上的不断提升,各大煤矿产区都选择采用了大型罐笼式矿井提升机,但是大型罐笼式矿井提升机体积过于庞大,所承载的产物重量和人员容纳量也是普通罐笼的几倍,为了保障提升机的安全运行,定期对罐笼进行一个彻底的检测是很有必要的,工作人员时刻把握住罐笼的运行状况,以免发生突发情况和事故[6]。
作为井下与地面连接的必要通道,矿井提升设备的日常维护需要工作人员与技术研究人员的费时费力,才能保证日常运行的稳定,由于矿井提升设备动态检测系统较为隐蔽,设备内部结构也十分精密复杂,哪怕日常技术维护与检测出现一丝不确定或者不到位,都会造成严重的后果。一个罐笼的大小由井筒的直径决定,目前国内矿区基本上规模较大,因此罐笼的构架也越来越大,装载的人员数量也随之增多。这也就导致了一个后果,但凡发生罐笼提升系统失效的谬误,就有可能导致甚至上百人的生命受到损害。经过专业技术人员对罐笼提升系统导致的矿难的研究总结与风险评估,让我们发现这些矿难发生的原因主要有以下几点:工作人员操作失误、检测装置失灵、连接的钢丝绳出现问题等。虽然我国矿业的开采与发展走在时代的前列,但是矿难发生的频率以及矿难的规模依旧是一个大大的难题,如今各个产业链对于矿资源的需求越来越高,矿业的开采深度也随之加深,这也就意味着我们的矿产行业需要更加安全的罐笼提升系统,对于罐笼的安全性检测技术也需要更大的进步与发展。因此,我们相关的技术行业需要对罐笼的安全检测技术投入更多的精力,从当前技术中的不足之处入手,大力鼓励新型技术的研制。
1.2 罐笼动态检测系统研究的意义
该项研究是罐笼动态检测系统的安全性研究中不可或缺的一环,本文将会对罐笼动态检测中的超速、状态及安全检测等方面展开仔细的论述,着重介绍一些相关的技术,分析这些技术系统运作的原理。通过以上论述,探讨罐笼动态检测系统中该如何去提高安全性,又该如何优化整个动态系统的运行效果。从基本的原理入手,可以从根本上去了解罐笼动态检测系统的运作与维护机制,同时也可以从方方面面上去解决罐笼的安全隐患问题。通过专业人士对罐笼安全隐患的风险评估,我们知道矿难发生的主要原因在于工作人员的操作以及连接的钢丝绳。罐笼动态检测系统的研究可以有效帮助我们及时发现相关的隐患问题,对罐笼提升系统中制动钢丝绳和罐道钢丝绳的断裂、损坏的发现有着绝对积极的作用,对工作人员劳动强度的反馈和工作人员在操作上的失误也有一个实时监控,有效减少工作人员的伤亡损失,设备的维修维护也能积极及时地反馈给相关技术层面人员。如此一来,生产效率呈现直线上升的模式,劳动成本的投入也随之减少,一举两得。同时最大的意义在于能够减少矿难的发生,也就减少了经济效益上的损耗,对矿业发展有重大的作用,为社会也创造了巨大的效益[2]。
2 罐笼动态检测技术概述
纵观矿业行业发展现状,在我国矿井行业内,最常见的一种检测技术就是格雷母线技术,这项技术可以十分精准地检测到罐笼位置,在多粉尘高湿度等复杂气体环境中也可以保持长时间的稳定的工作状态。这项技术对罐笼位置的实时监测精度可达5mm,在矿井作业中采用非接触绝对位置检测,并且无须相关工作人员频繁地进行设备维护,在提高了系统安全检测性能的同时,又可以提高矿井日常的作业效率。并且,格雷母线位置检测并不会被外界的各种因素所影响,因为格雷母线技术对位置检测的准确性,使得此种方法在罐笼动态检测中能够非常有效地提供罐笼于矿井中的实时位置,同时保持系统判断的准确性,从根本上杜绝各项安全事故的隐患。
光栅安全检测是用于对罐体两端与罐笼之间是否存在阻挡物的检测装置,这项装置通常会安装在罐笼上下盘或者侧壁。
在罐笼动态检测中,系统还需要对矿井罐笼运行的速度进行实时的监控。在罐笼超速检测中,首先需要通过系统对罐笼深度进行检测,然后再由传感器将监测脉冲输入系统计算机,通过数据的处理最后获得罐笼的深度。超速检测主要适用于系统是否启动超速制动这一安全措施中,这一项检测可以为相关工作人员提供极大的安全保护,因此在这方面的研究不可或缺尤为重要。
3 罐笼动态检测系统原理
光栅安全检测装置会基于不同工作状态来进行不同方法的测试。在罐笼运输人员时的工作状况中,光栅检测装置通常安装于罐笼上、下盘处,通过矿井井口的PLC 主机发射信号,此无线信号由上盘控制箱内的无线接收器接收,在信号接收后会启动光线发射器。因此在罐帘参与检测工作中,光线发射器发出的特定光束将会传输对接到另一侧的接收器中,光栅由此步骤形成[1]。
电动罐帘将于两侧光线接收器收到信号,确保防爆壳之间无阻挡物存在,由接收到低电平信号的控制器下放罐帘,同时对井口的PLC 主机发射信号,进行关闭安全门、抬起摇台等动作。等到载人的罐笼到达井底后,PLC 主机再次发射信号,通过两侧光纤发射器再次形成光栅确认是否存在阻挡物,确认无误后上提罐帘,同时对井底的PLC 主机发射安全信号。在罐笼下降前与上升前光栅检测过程中,若检测处有检测到阻挡物的存在,则声光报警器会发出信号停止罐帘的动作,直至阻挡物移除后才会进行光栅形成的步骤,接着再控制罐帘下放的工作[3]。
罐笼装料工作状况则无须罐帘进行工作,会由井口的PLC主机发射信号,接收到信号的无线接收器控制光线发射器形成光栅,确认无遮挡物后则发射安全信号至井口的PLC 主机处,由控制器关闭安全门、抬起摇台下放罐笼。
综上所述,对光栅检测装置原理总结为:通过分析控制器内部的光束接受情况以及电路状态,检测罐笼罐帘附近是否存满足安全间隙的要求,由此发射安全信号至井底和井口的PLC 主机,控制声光报警器与罐帘升降状态,光栅检测装置为提升系统实现了智能化,具有很高的可靠性与稳定性,光栅检测装置精密程度相当高,而且不会轻易受到外界因素的干扰,在后续的工作中也能发挥出优质的工作效能。
4 罐笼动态检测系统功能与设计
4.1 系统及程序设计
基于上文对光栅安全检测装置原理的分析与总结,下文中将通过仿真实验详细展开对罐笼超速检测装置的原理分析及罐笼超速检测系统的运作分析,本文中的仿真实验与实际应用中使用的测速传感器为雷达传感器[4]。
罐笼超速检测系统原理与构成组件如图1、图2 所示,通过系统初始化后对罐笼运行状态的检测,确认运行状态正常后,通过雷达测速传感器检测罐笼速度是否超过限定值,而状态确认后电机转动则由单片机对其进行控制,罐道抱紧制动由超速保护自锁装置启动,若下行过程中罐笼运动速度过大,则于抱紧致动后单片机控制双继电器恢复齿轮角度至初始位置,再次控制罐笼下行[7]。
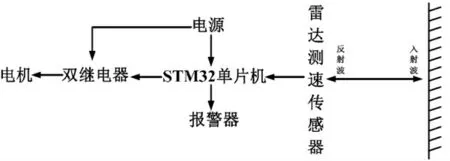
图1 超速检测系统原理
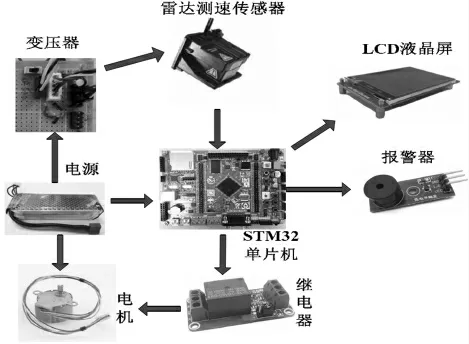
图2 超速检测系统组成部件
超速检测程序在LabVIEM 编程环境中运行,系统装载了GOP 控制双继电器程序与ADC 对差频信号程序,通过设计双继电器不得电、正向得电与反向得电三种状态中的内部电路元件运行设计,结合雷达测速传感器的使用进行GPI/ADC 驱动的开启和关闭。上下机位串口通信程度通过UART 的初始化,设置特定波特率与字节参数,通过COM 串口为上位机发送字符串,以实现罐笼超速信息实时通知功能,让地面工作人员知道实时情况,进而通过单片机对罐笼制动进行控制。另一方面,实时显示罐笼运行速度程序则需要使用TFTLCD 驱动程序,通常与LCD显示屏结合使用,其工作原理为:初始化LCD 为红色,将ADC 采集罐笼速度素质转换导入显示屏,通过设置字符串与文字显示速度及位置信息进行While 循环,达到实时显示的目的[8]。
4.2 关键零部件分析与优化
罐道制动辅助装置中,受到罐道直接施加的制动力部件为短连杆,通过ANYSYS 应力分析可得短连杆应力与变形云数据。
通过设置制动力为147000N 及辅助制动装置制动力为73500N 进行制动优化后,罐笼制动时发生倾覆概率有所降低。通过分析2D/3D 相应曲面图可得,短连杆厚度对短连杆总体变形影响最大,其长度对总体变形影响程度最小;通过局部灵敏度分析可得,短连杆厚度对应力影响最大,长度对应力影响最小;通过灵敏曲线可得,短连杆厚度对安全参数影响最大,长度对安全参数影响最小。因此在对辅助制动装置优化时应优先考虑短连杆厚度参数,以便获得最佳优化结果。
4.3 运动特性
在短连杆优化测试实验中,通过同时对左、右短杆运动分析可得其运动特性。在短连杆质心X 方向运动分析中。左短杆质心最小与最大位移值为-216mm/-456mm,右短杆质心最小与最大位移值为216mm/240mm。通过实时运动轨道分析可得,短连杆质心位移关于中心轴堆成且运动平缓,因此在制动过程中可有效缓解刚性冲击。
在运动过程中,左短连杆正方向最大运动速度为79mm/s,变化规律为0~3.7s 速度逐渐增大,3.7~5s 速度逐渐减小,则反方向运动最小运动速度为-79mm/s,变化规律为5~10s 速度逐渐减小,10s 时停止运动;右短连杆反方向运动最小运动速度为-79mm/s,变化规律为0~3.7s 速度逐渐减小,3.7~5s 逐渐增大,5s 时速度为0mm/s,正方向最大运动速度为79mm/s,变化规律为5~6.3s 速度逐渐增大,6.3~10s 速度逐渐减小,10s 时停止运动。由以上分析可得,短连杆运动速度负荷STEP 驱动函数,具有对中性且运动平稳可靠等特点。
5 结论
矿井罐笼动态检测是保障矿井作业安全性的重要环节,通过格雷母线检测、光栅检测及超速检测等安全检测装置,可实现对罐笼实时位置检测和监控,以便于了解到其运行状态及上升、下降过程中是否存在阻挡物等问题。通过雷达速度检测装置及GOP 控制双继电器等系统程序的安装,可以确保实时显示罐笼状态并监控其运行速度,在罐笼上下运动超速时通过对地面工作人员的实时反馈,及时启动罐道制动系统,以保障矿井作业安全。多线程的罐笼动态监控能够确保罐笼在日常使用运行中的稳定与安全,对于罐笼动态检测系统的研究揭示了这些安全检测装置的运行原理,从源头确定了这些技术可以有效帮助我们及时发现相关的隐患问题,从而减少了矿难的发生。这些技术的研发从根本上为矿业设备检修的工作人员提供了便利,在设备上的校正以及更换更加精确,工作人员采集的数据也能够很好地为后续技术的进步打下基础。这些技术也在相当一部分的矿区进行运用,种种实践也证明了一点,这些技术能够很好地为矿区运行服务,满足了各大矿井对于高安全性的矿井提升设备的需求,同时这些技术也对减小了矿难发生的概率,减少了矿难的规模以及后续造成的一些经济效益损害。同时提升了矿区运作的效率,确保了工作人员的安全,提高了工作人员的劳动积极以及劳动效率,为矿产开采的生产效率的提高发挥了不可磨灭的积极作用。
猜你喜欢
能源与环保(2022年9期)2022-10-25
山东煤炭科技(2019年5期)2019-06-06
环球人文地理·评论版(2016年6期)2016-08-23
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
物理与工程(2014年4期)2014-02-27
凿岩机械气动工具(2014年3期)2014-01-27
读者(2012年24期)2012-09-22
物理与工程(2011年1期)2011-03-25
杂文选刊(2010年9期)2010-05-14
