基于磁悬浮技术的矿山深部罐笼提升设备
2016-08-23 00:42王隆扬陈会官林一凡吴陈幼张春阳付梓煊
环球人文地理·评论版 2016年6期
王隆扬 陈会官 林一凡 吴陈幼 张春阳 付梓煊
摘要:结合磁悬浮电梯以及矿井提升特點,将磁悬浮技术运用到矿井提升设备中,提出磁悬浮罐笼,解决矿山生产中深部提升问题。简述矿井提升装置的现状,并设计磁悬浮罐笼提升原理、零件选取与安全防护。运用3DMAX软件建立三维动画模型并模拟磁悬浮罐笼解决矿井深部提升问题的过程。
关键词:磁悬浮技术;深部提升;罐笼;3D建模
1引言
随着国家工业化的发展,地表的矿物资源不断减少,矿山大部分已由露天转入地下,开采深度也由几百米发展到几千米,导致提升矿物的难度也越来越大,这对矿井提升系统提出了极高的要求。但是,现如今任何一种提升系统都需要钢丝绳作为媒介,随着开采深度的增加,钢丝绳需要设计的越来越粗,使得钢丝绳自重不断增加、提升机越来越大型化,在达到一定深度时,有绳提升装置将会受到极大的限制甚至无法使用。这成为限制传统提升方式提升深度的一个重要因素。因此,随着矿山开采深度越来越深,迫切需要新的安全高效的提升设备改善提升状况。
近年来,磁悬浮技术发展迅速,实现磁悬浮竖直提升已不是难事。磁悬浮罐笼采用无绳提升技术,提升量不受矿井深度的限制,与传统有绳提升装置相比较,更加适合深井提升。同时,在磁悬浮罐笼正常工作过程中摩擦损耗少,能量利用率高,对设备磨损轻微,相较普通罐笼,磁悬浮罐笼维修费用更低,使用寿命更长。
2磁悬浮罐笼结构设计与原理介绍
2.1磁悬浮罐笼的组成结构
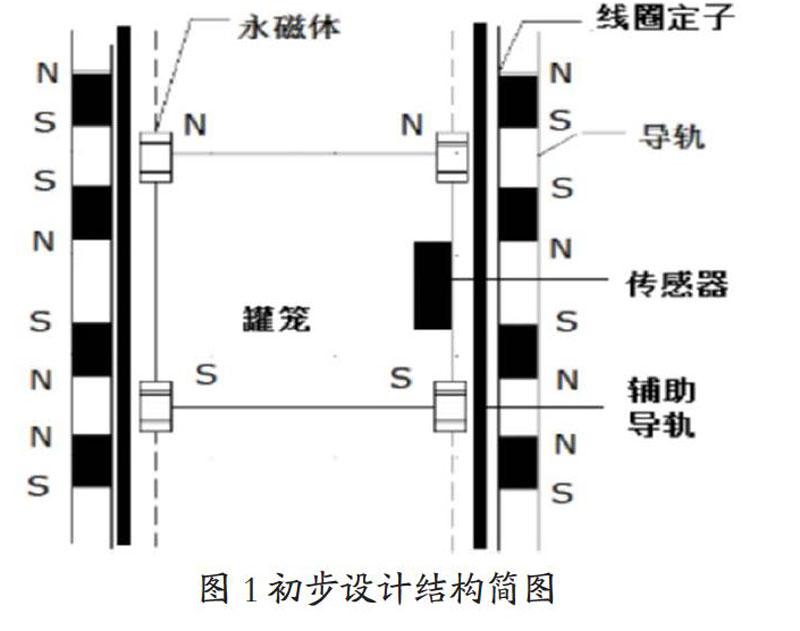
磁悬浮罐笼主要由罐笼、直流电机、导向系统、永磁体、电阻式传感器以及vvvF控制器组成,图1为磁悬浮罐笼的初步设计结构简图。在罐笼八个角分别安装有永磁铁,上部四个永磁体磁极相同,下部四个永磁体磁极相同。在井筒四周安装导向系统,导向系统由电磁导轨与辅助导轨两部分组成,电磁导轨上按照一定间距轴对称排列一定数量的线圈定子,为罐笼提供动力。辅助导轨采用传统的T型导轨、滚动导靴以及导轨架组成,辅助导轨在磁悬浮罐笼正常工作时处于停滞状态即滚动导靴不与导轨接触,仅在电流不稳定以致罐笼左右摇摆时滚动导靴与导轨接触起辅助导向作用以及遇到突发性动力丧失时起到紧急制动作用,用来保证罐笼及其相关设备的安全。直流电机与VVVF控制器、电磁导轨串联,传感器安装在罐笼上。
2.2磁悬浮罐笼的工作原理
在磁悬浮罐笼工作过程中,通过罐笼上的传感器将罐笼的位置信息传递给控制器,再通过控制器不断改变线圈定子的电流方向以及电流大小使罐笼平稳运行。在罐笼运行过程中,通过控制器始终保持罐笼上的永磁体的磁极方向与该永磁体左上角或者右上角的线圈定子的磁极方向相同,始终保持罐笼上永磁体的磁极方向与该永磁体左下角或者右下角的线圈定子的磁极方向相反,这样就使得每个永磁铁上方的线圈定子对永磁体产生吸力,下方的线圈定子对永磁体产生斥力,根据磁悬浮罐笼运行状态控制各线圈电流大小,使罐笼按照设计的速度状态运行。
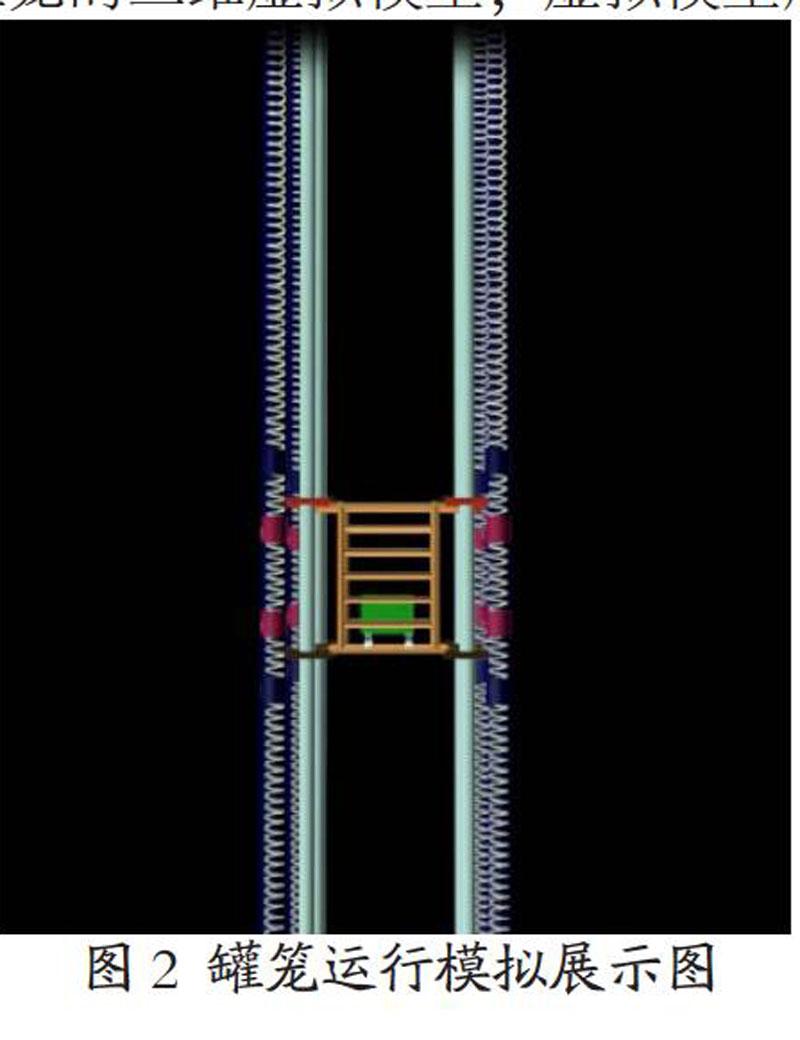
3磁悬浮罐笼提升三维模型
现如今虚拟现实技术飞速发展,3D建模技术在矿山中的应用已不在少数。为了能够更好的演示磁悬浮罐笼的工作原理以及验证磁悬浮罐笼技术的可行性,我们利用3DMAX软件制作磁悬浮罐笼的三维虚拟模型,虚拟模型展示如图2。
4结论
现如今影响矿山深部开采的原因归纳起来主要有三大因素:高应力、高地温、高井深。其中“高井深”导致的主要问题是提升设备大型化,甚至当开采到一定深度时传统提升设备将无法正常工作,由此也引出了大型提升设备安装、维护困难,经济成本高等问题。
磁悬浮技术高速发展,磁悬浮电梯已然成为现实。结合深部矿井提升特点与磁悬浮电梯而提出的磁悬浮罐笼用来解决深部矿井提升困难等问题。磁悬浮罐笼采用无绳提升技术,解除了钢丝绳对开采深度的限制。同时也减少了设备与设备之间的摩擦损耗,降低成本。
猜你喜欢
能源与环保(2022年9期)2022-10-25
防爆电机(2022年4期)2022-08-17
防爆电机(2021年4期)2021-07-28
小学科学(学生版)(2021年4期)2021-07-23
大电机技术(2021年2期)2021-07-21
山东煤炭科技(2019年5期)2019-06-06
水电与抽水蓄能(2018年1期)2018-03-07
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
机械研究与应用(2015年4期)2015-05-11
凿岩机械气动工具(2014年3期)2014-01-27