
面向车辆高速移动的频谱感知算法研究
2022-01-07 14:09陈玲玲郭帅飞金小杭
吉林化工学院学报 2021年11期
陈玲玲,郭帅飞,金小杭
(吉林化工学院 信息与控制工程学院,吉林 吉林 132022)
当今社会交通技术发展迅速,汽车已走进了千家万户,给人们的工作生活带来极大的便利,但与此同时拥挤的交通、频发的交通事故等安全问题也接踵而来.对此,可以运用车联网技术解决这些问题[1].利用车联网技术实现车与车间(Vehicles to Vehicles,V2V)、车与基础设施间(Vehicles to Installation,V2I)的通信,实时获取车辆行驶参数以及当前的道路情况,从而实现信息的传输与共享[2-3].由于车辆在高速行驶的过程中,势必会产生多普勒效应,从而对车辆在无线通信环境中频谱感知的速度与精度产生较大的影响,而且会过多占用频谱资源,目前现有的频谱资源已不能够满足车联网技术的需求.针对频谱感知性能以及频谱资源利用率低下的现状,有学者利用认知无线电技术和车联网有效结合构建认知车联网(Cognitive Radio enabled Vehicular Ad-hoc Networks,CR-VANETs),通过机会式占用授权频段、提高频谱检测性能和频谱利用率成为解决车联网频谱供需不足的有效手段[4-8].因此,如何设计合理且有效的在车辆高速移动环境下的频谱感知算法成了亟待解决的问题.
1 系统模型
1.1 认知车联网系统模型
在CR-VANETs环境中,首先要对授权频段进行频谱空洞的检测,从而能够以动态的方式接入空闲频谱[9-10].用H0和H1分别表示授权车辆不存在和授权车辆存在,假设道路上共有N个认知车辆CRi(i=1,2,…,N),频谱检测的周期为T,则频谱感知模型可以表示为:
(1)
其中,xi(t)表示在t时刻认知车辆i所接收到的信号;ni(t)表示加性高斯白噪声(AWGN);hi(t)表示频谱感知信道增益;s(t)表示授权车辆信号.在二元假设情况下,利用频谱感知技术获取频谱数据,并建立所对应的检测统计量Y(x),使其与预先设定的干扰阈值对比从而得出结果,形式如下:
(2)
D0表示对比结果显示此频段未被授权车辆占用;D1表示对比结果显示授权车辆正占用此频段.
1.2 车辆高速移动系统模型
在CR-VANETs中,位置因素以及快速行驶的特性会影响认知车辆的通信环境,信道状态信息会受到多普勒频移、多径衰弱等因素的干扰而产生改变.
多普勒信号模型见图1,假设信号发射源与认知车辆的距离为R0,当前车辆行驶速度为vc,在信号源方向的径向分量为v[11].

图1 多普勒信号模型
假设认知车辆在一定时间内的行驶速度和方向均不变,则该认知车辆相对于信号源的径向距离表示为:
R(tm)=R0+vtm,
(3)
其中,tm表示慢时间分量.
已知在车辆的整个行驶过程中信号源持续不断发射信号,用s(t)exp(j2πfct)表示,s(t)表示基带信号;fc表示信号载波;t为表示时间变量.认知车辆接收信号时会有延时的影响,同时由于高移动性也会受到多普勒频移的干扰.因此将该接收信号分段,见图2.

图2 信号分段
图中tr表示快时间分量,总的时长t=tm+tr.
通过下变频(去除fc因素后)处理,接收信号为:
(4)
A表示信号幅度.
首先对tr进行傅立叶变换,可以得出慢时间域信号:
(5)
fr表示相对tr的距离频率;M为分数段.
由式(5)可得,该认知车辆的多普勒频率为:
(6)
c表示光速,λ=c/fc.
利用式(5)中第2段至第M段的信号分别与第1段的信号做共轭相关
(7)
则由式(7)可知,由预先设定的距离R0所产生的干扰消失.
(8)
(9)
由(8)、(9)可得:
(10)
此时可以对距离频率fr和慢时间分量ta分别进行傅立叶逆变换和傅立叶变换可得:
(11)
其中,p(tr)表示tr=0时能量聚集的包络信息;δ(·)表示Delta函数;fa表示多普勒频率轴.
2 频谱感知算法
2.1 双门限能量检测

(12)
则检测统计量YE服从以下分布:
(13)
(14)
(15)
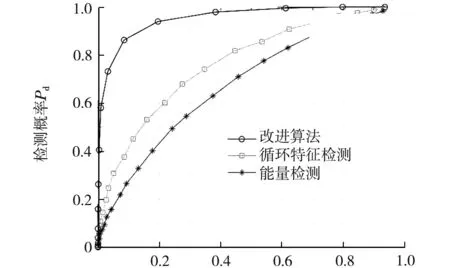
如何设定干扰阈值是提高频谱检测性能的关键,当Y≤λ1时,说明该通信频段中没有授权车辆使用,此时认知车辆可以接入该频段;当Y≥λ2时,说明该通信频段中有授权车辆正在占用,此时认知车辆需要退出该频段;当λ1 OR准则是将各个认知车辆所得到的检测结果使用“或”逻辑运算融合,该计算表明在整个检测结果中只要存在授权车辆的信号,即认为该频段已被占用,反之则认为该频段属于空闲状态[13].虽然该融合准则会导致虚警概率有所升高,但可以在很大程度上提高检测概率,其检测概率和虚警概率分别为: (16) (17) 文章通过利用MATLAB软件针对Keystone变换的多普勒频移算法仿真验证.实验假设测试道路路长为2 km,宽度为15 m,其中授权道路距离为150 m.传输信号采用BPSK,信号载波频率为fc=700 MHz,码元速率为f0=70 Mbit/s,采样频率为fs=20 GHz,采样点数N=1 024,信噪比为SNR=-10dB.其中认知车辆在该道路保持匀速行驶,速度为v=20 m/s,仿真次数设为10 000. 实验仿真结果表明,针对车辆移动所产生的信号偏移与弥散现象,通过共轭相乘校正,搜寻信号峰值所在单元,从而对其补偿. 由图3和图4可以看出,受车辆高速移动的影响,产生了多普勒效应,使信号出现了偏移和弥散现象. 距离频率/Hz图3 信号分段 距离频率/Hz图4 信号弥散程度 由图5和图6可以看出,该分段信号通过共轭相乘,校验传输信号,从而能够把信号能量集合在同一单元. 时延/s图5 共轭相乘后的时延频谱图 图6 多普勒频率估计 通过仿真对比,验证频谱感知算法与常规能量检测算法以及循环平稳特征检测算法检测能力的优越性.参数设置如下:虚警概率Pf=0.09,其他系统参数如上所提. 由图7和图8可以看出,随着信噪比的不断增大,曲线整体呈上升趋势,所提算法性能明显优于常规能量检测算法和循环特征检测算法,且当检测概率提高时,效果更为明显. SNR/dB图7 不同SNR下的检测概率 虚警概率Pf图8 不同算法的ROC曲线 在信噪比一定的情况下,当虚警概率逐渐增大时,算法的检测概率也会随之增大,效果提升约10%,系统整体的检测性能有所改观,如图9所示. False alarm probability,PFa图9 不同融合准则的ROC曲线图 针对车辆在信号传输中所遇到的频谱资源短缺问题,通过结合认知无线电技术构建CR-VANETs,在此环境下研究多普勒频移信号模型以及频谱感知信号模型,从感知精度和感知速度两方面对所提算法进行分析.仿真结果表明,该算法可以在低信噪比的情况下消除多普勒频移对于检测精度及性能的影响,进一步提高了频谱检测性能.然而,本文考虑场景相对简单,且并未考虑道路中其他车辆以及天气等因素带来的干扰,下一步将重点考虑该方面因素.2.2 融合准则
3 算法仿真结果及分析
3.1 多普勒频移补偿仿真及分析




3.2 频谱感知算法仿真及分析

3.3 融合准则仿真及分析

4 结 论
猜你喜欢
兵工学报(2022年11期)2022-12-01
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
空间科学学报(2021年6期)2021-03-09
物联网技术(2019年9期)2019-11-06
测控技术(2018年7期)2018-12-09
科学与财富(2017年24期)2017-09-06
设备管理与维修(2017年1期)2017-04-11
CHIP新电脑(2016年3期)2016-03-10
电子设计工程(2014年19期)2014-02-27
