
Improving seeking precision by utilizing ghost imaging in a semi-active quadrant detection seeker
2021-12-24 02:49SiyuanWANGLijingLIWenCHENMingjieSUN
CHINESE JOURNAL OF AERONAUTICS 2021年12期
Siyuan WANG, Lijing LI, Wen CHEN, Mingjie SUN
Department of Opto-electronic Engineering, Beihang University, Beijing 100083, China
KEYWORDS Digital micro-mirror device;Ghost imaging;Guidance system;Image acquisition;Semi-active laser seeker
Abstract Conventional semi-active laser guidance takes advantage of the laser designator to illuminate the stable and uniform laser spot on target precisely.The seeker collects the reflected light by a quadrant detector and outputs the relative position information to guide the missile to the illuminating laser spot.However,the designation and guidance accuracy could be jeopardized by the randomly drifting of laser spot caused by the instability of designation platform and air turbulence.In this work,ghost imaging technique is adapted to a quadrant detector semi-active seeker by utilizing structured illumination on the target. With a series of structured illumination masks, the signals from the quadrant detector are multiplexed to perform calculation of the target relative position as well as image reconstruction of the illuminated area simultaneously. Automatic target recognition methods could be further applied to the reconstructed image to calculate the designating error and correct the guidance. The results of simulation and experiment demonstrate that the proposed method could improve the guidance accuracy in many circumstances which would lead to attacking deviation if conventional semi-active laser guidance is used.
1. Introduction
Semi-Active Laser (SAL) guidance weapons attack the target by detecting the encoded laser spot projected by the designator which is operated by human being or automatic platform.1The SAL guidance weapons strike precisely when the designating laser spot illuminates right on the target. In reality, designation error caused by the operation instability and atmosphere turbulence is the main factor of the attacking error.2Conventional SAL ammunition cannot identify the designation error but only maintains the collected laser spot on the middle of the Quadrant Detector(QD).The attacking precision could be improved by estimating the designation error and correcting the Line-Of-Sight (LOS) angle with the image information of illuminated area.
Much researches have been done to improve the guidance accuracy of tracking the designation laser spot. Furthermore,it is necessary to measure the designation error to improve the guidance accuracy. Ghost Imaging (GI) technique can be applied to the conventional SAL seekers based on QD to identify the designation error by imaging the illuminated area and recognize the target.Rather than using a detector array in a conventional digital camera,GI technique images a scene by illuminating a series of masks and associating the knowledge of these masks with their corresponding measured intensities3-7using only a single-pixel detector. Therefore, the technique is sometimes known as single-pixel imaging.8-11GI has shown a potential in non-conventional imaging, such as three-dimensional imaging12-14and adaptive imaging.10,15,16Coincidently, recent GI works used QD to address framerate issue of the imaging system.17,18However,it also provides a potential scheme for SAL seeker system.
In this paper, we address the problem that the designating error of conventional SAL guidance affects the attacking accuracy.We adapt GI to the SAL seekers to acquire the image of the illuminated area, and combine it with the Automatic Target Recognition (ATR) algorithm to calculate the designation error.The simulation and experiment results demonstrate that the proposed method can make the conventional seekers intelligent and measure the designation error to improve the guidance precision compared to conventional SAL guidance method.
2. Scheme of GI guidance system
Conventional SAL seeker consists of optical lenses and QD as shown in Fig. 1(a). The lens group collects parallel laser reflected from the target and forms a uniform laser spot on the QD. The light intensities on four orthogonally arranged photodetectors are transferred into voltage signals which can be used to calculate the laser position on the QD by19,20

where Vn(n=1, 2, 3, and 4) are the four-channel outputs of QD,and(x,y)are the normalized coordinates of the laser spot on the QD.With the seeker optical system’s focal length f and the QD’s radius r, we can calculate the relative pitch angle ε and yaw angle θ between the designating laser spot and the light axis of the seeker:21

Laser designation error consists of most of the delivery error.The error of the designation is mainly decided by several factors: the tracing error angle of operator α, the parallelism error between aiming axis and laser axis δ, and the atmospheric turbulence σ. The comprehensive error angle of the designation φ can be estimated by

In conventional SAL guidance,the LOS is measured by seeker coupling the designation error and sways as stochastic process. Especially, the low-frequency error influences the guidance accuracy severely.22The designation error could be identified by the image information of illuminated area which is obtained by GI method.
The GI guidance system is shown in Fig. 1, and the designation laser spot is spatially modulated by a series of patterns Pi, in which i is the index of illumination during one imaging process. The laser intensity Sireflected from the illuminated target O is measured by the seeker and associated with the corresponding modulated pattern Pito reconstruct the image of illuminated area. The illuminated area can be fully sampled and reconstructed as an N pixelated image after performing N orthonormal basis mask modulations and intensity measurements, and then the image can be reconstructed by

In this work, the modulation masks Piare generated from the Hadamard matrix which consists of orthogonal columns whose elements are all ±1.23,24All columns of Hadamard matrix can be reshaped into square arrays and constitute a set of orthogonal modulation masks of n×n pixels which were generated from a N×N Hadamard matrix with the relationship N=n2.Thus,the designating laser spot is modulated into square laser pattern. To realize the real-time and lowresolution application in guidance system, we reorder the Hadamard matrix modulation patterns with ‘Russian Dolls’(RD) ordering.25This method reduces the sampling time by adjusting the spatial resolution rather than reducing sampling rate which potentially leads to loss of information. The good computational performance of RD method can also accelerate the image reconstruction process.
For the designation system,the size of the designating laser pattern determines the imaging area. Variation of designating distance and the different interested areas of target object need to resize the designating laser pattern. To obtain the reconstructed image with appropriate size, the zoom lens group could be utilized to adjust the dimension of designating laser patterns. One solution with more simplicity is to control the laser pattern size with Spatial Light Modulator (SLM). This scheme is simpler and more reliable compared to the conventional optical method but with laser energy loss and Signal to Noise Ratio (SNR) reduction of reconstructed image.
In the seeker system, the lens collects the parallel laser reflected from the target and forms a uniform laser spot on the QD. The relative position of the designating laser can be calculated by conventional SAL guidance algorithm. Simultaneously,the QD of the seeker is used as a single pixel detector,the four-channel outputs are summed up as the intensity measurement Siof each modulated illumination. The correlation operation with pattern Piis processed in the embedded processor to reconstruct the image of illuminated area I. The size of laser spot and its drifting range are much smaller than the Field Of View (FOV) of the seeker optical system during the guidance process. The missile will also adjust its posture to maintain the designating laser pattern in the middle of FOV.Thus, the seeker can completely collect the reflected laser information.
The illuminated area of target can be recognized by ATR algorithm. In this work, the prototype algorithm is based on average hashing and template matching method. The image of the target can be captured by ordinary camera, and then the hash values of templates are extracted with average hash algorithm and uploaded to the seeker’s memory. The size of the template blocks is decided by the dimension of the designation laser spot which is an identical value in certain distance.The hash value of each reconstructed image is calculated for matching the illuminated area to the template with the similarity measurement of the Hamming distance. After calculating the distance between the recognized area and the center of the target, the designation error from laser spot to the ideal attack point can be estimated. The recognition accuracy is affected by the spatial resolution of the reconstructed image.A lower resolution will lead to matching errors. However, a higher resolution imaging cannot meet the real-time requirement of guidance system. The spatial resolution of 32×32 is a balanced choice between recognition accuracy and realtime performance.
Theoretically, every modulated laser shot can be used to calculate the relative position of designating laser spot with conventional SAL guidance method. However, the first few modulation masks are nonuniform because it consists of several big binary blocks which would cause the drift of positioning result. We adopt the differential modulation method to retain the accuracy of positioning result. The detection signal of a pair of differential masks are combined as the output of a full illumination laser shot to calculate the target position which is equivalent to conventional SAL position method.The other advantage of differential modulation is that the SNR of reconstructed image can be improved.10The disadvantage is that differential modulation will halve the frame rate.
Just like other imaging technique, the relative motion between target and imaging system causes image blurring. In GI guidance system, both the target movement and illumination drifting degrade the quality of reconstructed image. The influence of the relative movement between the illuminating laser spot and the target was investigated in one of our previous works.12The conclusion is that the image quality of the reconstruction is acceptable if the target motion is smaller than 0.2 FOV during the formation of the image. In our proposed system, the designator is controlled to aim at the target, and the relative motion between target and illumination in two adjacent frames is usually less than 0.2 FOV. Small amplitude random motion will also cause the edge blur of reconstructed image. However, the imaging time could be further decreased by utilizing compressive sensing techniques if the target moves rapidly.
3. Simulation and experiment results
3.1. Simulation results
We carry out the simulation to illustrate the attacking workflow of GI guidance system. The scene contains target that is shown in Fig. 2(a). In the simulation, the missile is launched from 2000 m away from the target and approaches the target in the speed of 200 m/s. The attitude of missile is assumed stable and its axis is assumed to aim at the center of the target to simplify the calculation and comparison of positioning results. The laser spot drifts along the simulated red line trace in Fig. 2(a) which is composed by several designation errors.The Hadamard modulated laser spot illuminates on the target as a square of 1 m in the repetition rate of 10 kHz. After processed with the GI reconstruction algorithm, the image of the illuminated area is obtained 5 frames per second.
Three reconstructed images during the attacking progress are shown in Fig.2(a)where the SNRs of these images increase as the distance between the missile and the target decreases.All three reconstructed images can be matched to the pre-obtained template and the illuminated area can be recognized in the scene which is marked by the yellow rectangles. The center of the illuminating spot is represented by red stars and the center of recognized area is recognized by yellow stars.The correction information is represented by the blue arrows which can be used to improve the accuracy of terminal guidance and the correction results are represented by the blue stars.
The position result during a modulation cycle is shown in Fig. 2(b). The purple and red dashed line represent the yaw angle and pitch angle of the laser center respectively. The calculated positioning results which are represented by orange and blue solid lines jitter because of the nonuniformity of the first several modulation masks.With more uniform modulation masks,the positioning result converges to a range which is slightly different from the illuminating center.As the purple dots shown in Fig. 2(a), the deviation from the illumination center is caused by the reflectivity difference of the target and background.This slight deviation will always distribute within the illuminated area which is much smaller compared to the drift of designation laser spot.
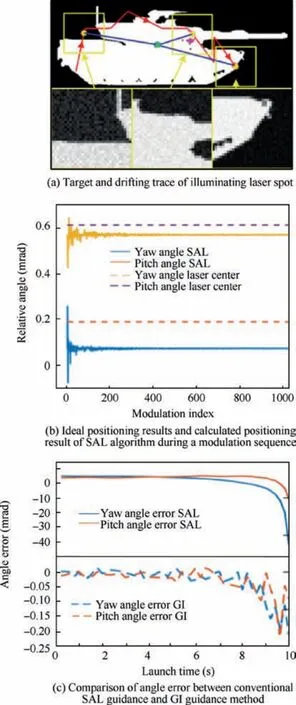
Fig. 2 Simulation results of SAL and GI guidance.
The position error of SAL guidance and GI guidance is compared in Fig. 2(c) which shows that the position error of GI guidance is far less than conventional guidance method.The corrected guidance points are much closer to the ideal attack point compared to the designation centers.The GI seeker can recognize and calculate the deviation information for the guidance system.
3.2. Dynamic experiment results
We set up the GI guidance system to verify the efficiency of our method as shown in Fig. 3. The Diode Pump Laser (DPL)source (Viasho VA-I-LNS-1064, wavelength: 1064±0.1 nm;pulse energy:30 mW)is expanded and uniformed to illuminate on the high-speed Digital Micromirror Device (DMD, Texas Instruments Discovery 7001, resolution: 1024×768, wavelength: 350 nm-2500 nm, operating at 10 kHz) which is used to spatially modulate the designating laser spot with the sequential preloaded modulation masks. The laser source is triggered by the DMD signal. The camera lens (Nikon AF Nikkor,focal length:85 mm;aperture:f1.2)projects the modulated laser spot on the target which is an image of tank located on a displacement stage ~2.3 m from the seeker. The designation system is fixed so we move the target image as the equivalent to the drift of laser spot on target.The reflected laser is collected by a SAL seeker based on QD (First Sensor QA4000-10 TO, wavelength: 500 nm-1100 nm, active area:3 mm2/segment) and converted into voltage signals. The outputs of seeker are converted and recorded by the embedded processor (TMS320F28335, Texas Instruments, operating at 150 MHz which integrates analog-to-digital converter, sampling with four input channels at 200 KS/s/channel). Further process will be done with MATLAB in computer.
To suppress the common mode noise,we use a sequence of differential Hadamard masks reshaped from a 1024×1024 Hadamard matrix. After 2048 illuminations and measurements, a 32×32 image is reconstructed as the input of the ATR system. The template is down-sampled to generate the template hash library with the average hash algorithm in the resolution of 32×32. The similarity of reconstructed image and template is measured by the hamming distance to recognize the illuminated area in the scene. The deviation of designation and the correction information can be calculated.
The result of dynamic experiment is shown in Video S1.The red rectangle marks the illuminated area and the red star is the illumination center. The yellow rectangle marks the matched result and it is almost coincident with the red rectangle which means that the image reconstructed by GI method can be used to recognize the illuminated area.The designation point is corrected from the red star to the blue star which is much closer to the ideal attack point represented by the green star.
A frame of reconstructed images and the positioning results of SAL method are also shown in Fig. 4(a). The trace of the equivalent illumination centers in the experiment is represented by red dotted line around the tank.The position results represented by red dots in cross line are stable for the reason that the laser spot is stationary relative to the seeker.
The quantitative analysis of positioning error from the ideal attacking point is shown in Fig. 4(b). The designation angle error drifts significantly in the experiment while the corrected direction is stable at a small angle error.The continuous drifting of laser spot in horizontal direction causes the error angle from+20 to-20 mrad relative to the center of the target.The original position error varies 10 times larger than the corrected error whose error range is less than 4 mrad.The position error in vertical direction fluctuates within a larger range, while the corrected error in vertical range is much more stable with smaller value that is less than 2 mrad.
4. Conclusions
In this work,we establish a GI guidance system by adopting a DMD and spatial light modulation technology to the conventional laser designator system and verify the imaging scheme on the SAL seeker based on QD. The designation deviation information could be extracted by imaging the illuminated area with GI method and recognizing the target with ATR algorithm. Our work makes the conventional SAL seeker acquire the imaging ability and be more intelligent to modify the guidance strategy to improve the attacking accuracy.Another advantage of this method is that the reconstructed image is relatively stable in shape and dimension approaching the target and it is easier to be processed by the ATR algorithm. The computational imaging system also has lower requirement on optical system compared to the direct imaging system. However, the large number of an illumination sequence demands higher repeat frequency of laser which will always conflict with the energy of a single laser pulse.The compressed sensing17or other method can reduce the sampling number in the image reconstruction. Other efficient reconstruction algorithms26and ATR algorithms for GI27can be utilized in the GI guidance system.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This research was co-supported by National Natural Science Foundation of China (Nos. 61922011 and 61675016) and the Fundamental Research Funds for the Central Universities.
 CHINESE JOURNAL OF AERONAUTICS2021年12期
CHINESE JOURNAL OF AERONAUTICS2021年12期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Entropy based inverse design of aircraft mission success space in system-of-systems confrontation
- Nonlinear resonance characteristics of a dual-rotor system with a local defect on the inner ring of the inter-shaft bearing
- Failure mechanisms of bolted flanges in aero-engine casings subjected to impact loading
- Synchronized perturbation elimination and DOA estimation via signal selection mechanism and parallel deep capsule networks in multipath environment
- A high dynamics algorithm based on steepest ascent method for GNSS receiver
- Relevant experience learning:A deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments