
改进的萤火虫算法在双缸同步控制系统中的应用 Application of Improved Firefly Algorithm in Double Cylinder Synchronous Control System
2021-11-30 17:42樊凯FANKai刘慧LIUHui刘杰LIUJie
内燃机与配件 2021年22期
关键词:PID控制
樊凯FAN Kai 刘慧 LIU Hui 刘杰 LIU Jie


摘要: 为提高双缸同步控制系统控制精度,在建立系统数学模型基础上,利用改进的萤火虫算法对系统中的PID参数进行了优化,基于“串联型”和“并联型”同步控制结构在MATLAB/simulink中建立了仿真模型,将“串、并联”仿真结果进行了对比,主要得出以下结论:“并联型”对于最大同步误差和稳态同步误差的控制效果优于“串联型”。因此“并联型”更能提高双缸同步控制精度。
Abstract: In order to improve the control accuracy of the double cylinder synchronous control system, based on the establishment of the system mathematical model, the PID parameters in the system are optimized by using the improved firefly algorithm. Based on the"series" and "parallel" synchronous control structure, the simulation model is established in Matlab/Simulink. The simulation results of "series and parallel" are compared, and the main conclusions are as follows: The control effect of "parallel type" for maximum synchronization error and steady-state synchronization error is better than that of "series type", so "parallel type" can better improve the accuracy of double cylinder synchronization control.
关键词: 双缸同步控制;萤火虫算法;PID控制
Key words: double cylinder synchronous control;firefly algorithm;PID controller
中图分类号:TP301.6 文献标识码:A 文章编号:1674-957X(2021)22-0233-02
0 引言
双缸同步控制系统应用范围广,例如双缸四柱液压机,其作为一种工程机械,可完成对金属和非金属的挤压、拉伸和冲裁等任务[1-3]。为避免液压机结构卡死等危险情况的发生。因此需要采取合适的同步控制策略,才能实现双缸精确的同步控制[4-7]。本文通过改进萤火虫算法,对PID进行参数优化,建立了双缸系统开环传递函数,并仿真对比了不同控制结构的同步控制性能。
为提高双缸同步控制精度,国内外学者进行了研究。例如沙宝银[15]为解决3000kN液压支架试验台活动平台及垂直外加载平台远程四缸同步控制技术难题,设计了基于PXI平台和LabVIEW RT的液压支架试验台远程多缸同步控制系统,实际应用表明,在液压支架试验台活动平台调高过程中,该系统的四缸最大同步误差为0.91mm,四缸最小同步误差为0.63mm;富强[16]选用先导式位移一电反馈比例方向节流阀,移一电反馈电液比例节流阀的输入和主閥芯的位移输出通过感应式传感器形成自身闭环控制,基于电液比例技术进行支架试验台同步控制系统的设计具有成本低,同步精度高,适应性好等特点,为进一步设计与试验奠定了基础。毛君[17]等提出了一种新型萤火虫算法应用于机尾PID控制器的控制策略,在标准萤火虫算法的动态决策域半径更新公式中,为克服优化初期寻优速度慢和增强算法的全局探测能力,对其中决策域更新系数进行改进。
在建立系统数学模型基础上,利用改进的萤火虫算法对系统中的PID参数进行了优化,基于“串联型”和“并联型”同步控制结构在MATLAB/simulink中建立了仿真模型,将“串、并联”仿真结果进行了对比。
1 萤火虫算法改进及PID参数优化
基本萤火虫算法[8,9]采用的是固定步长的方式,固定步长会使算法陷入局部最优,不便于在全局内搜索最优解,因此本文利用模糊算法将固定步长更改为自适应步长,以提高其全局搜索能力。模糊控制器输入变量为算法第i次搜索结果与第i-1次搜索结果的误差e及其偏差值变化率ec;输出变量为自适应步长变化量Δs,其模糊控制规则表为常用模糊控制规则表,这里不再列出。模糊控制规则表中的NB、NM、NS、ZO、PS、PM、PB分别表示负大、负中、负小、零、正小、正中、正大[4]。下面采用改进的萤火虫算法优化PID参数[5],评价指标采用ITAE作为指标函数,如下式所示:J=te(t)dt(1)设置萤火虫种群规模n为50,初始荧光素L0为5,荧光素浓度挥发速度系数ρ为0.3,个体更新速度系数γ为0.5,决策域范围更新系数初始值β为0.07,初始步长w(0)为0.02,最大迭代次数为50。在Matlab中编写程序,经改进的萤火虫算法优化后的PID参数整定结果为:Kp=19.5、Ki=1.1和Kd=0.9。
2 双缸同步控制系统数学模型
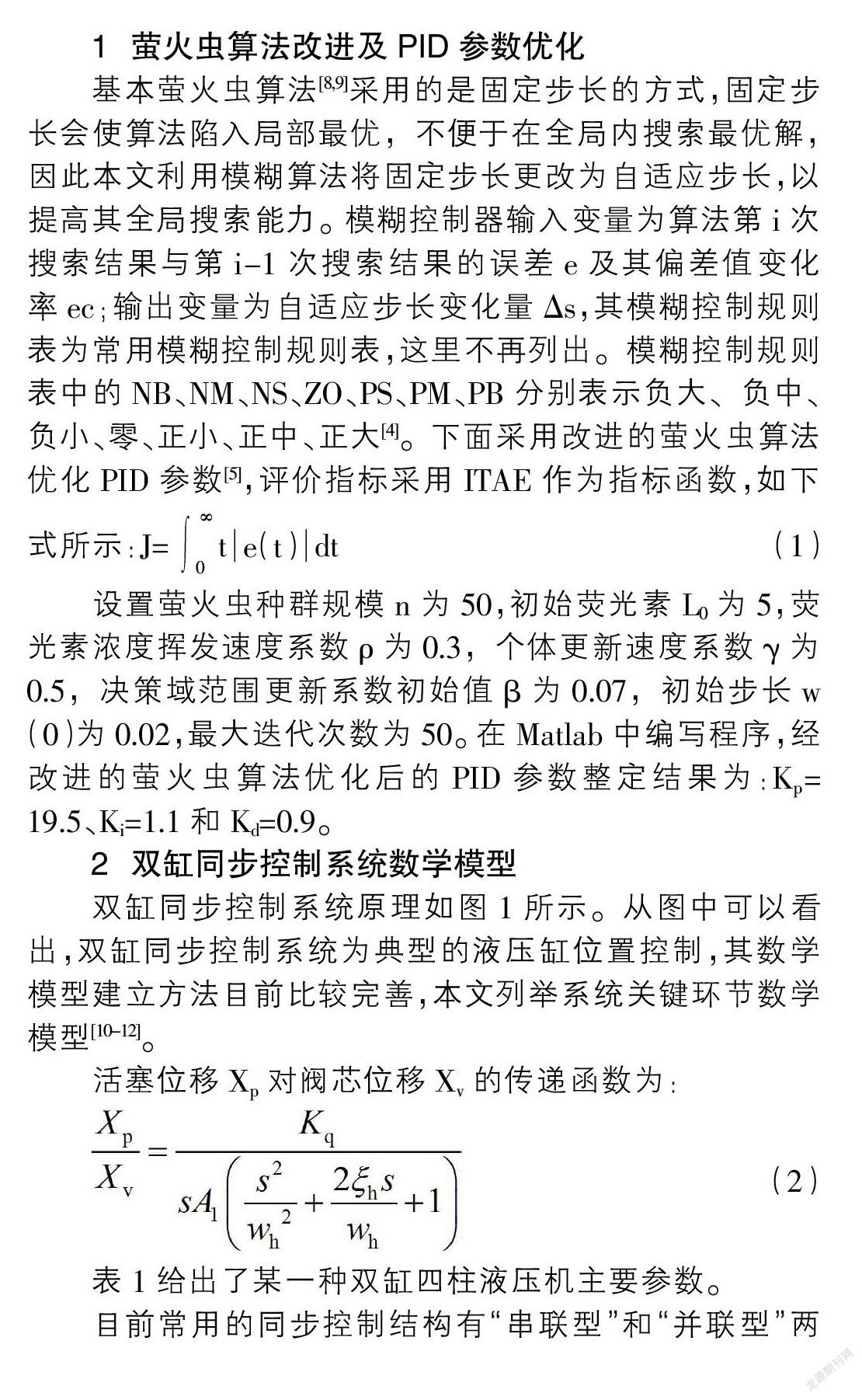
双缸同步控制系统原理如图1所示。从图中可以看出,双缸同步控制系统为典型的液压缸位置控制,其数学模型建立方法目前比较完善,本文列举系统关键环节数学模型[10-12]。
活塞位移Xp对阀芯位移Xv的传递函数为:
(2)
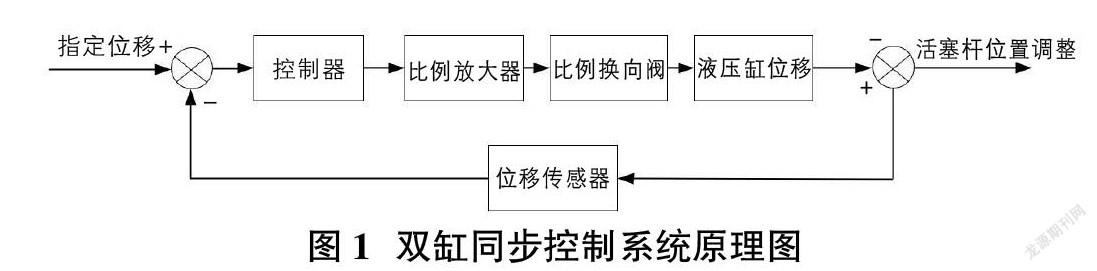
表1给出了某一种双缸四柱液压机主要参数。
目前常用的同步控制结构有“串联型”和“并联型”两种[13,14],为验证上述两种控制结构在双缸四柱液压机同步控制系统中的控制效果,在simulink中进行仿真分析。对“串联型”仿真模型添加阶跃信号,运行仿真结果如图2所示。
如表2所示,采用最大同步误差及稳态同步误差两个指标对仿真结果进行评价,最大同步误差为0.54mm,稳态同步误差为0.07mm。
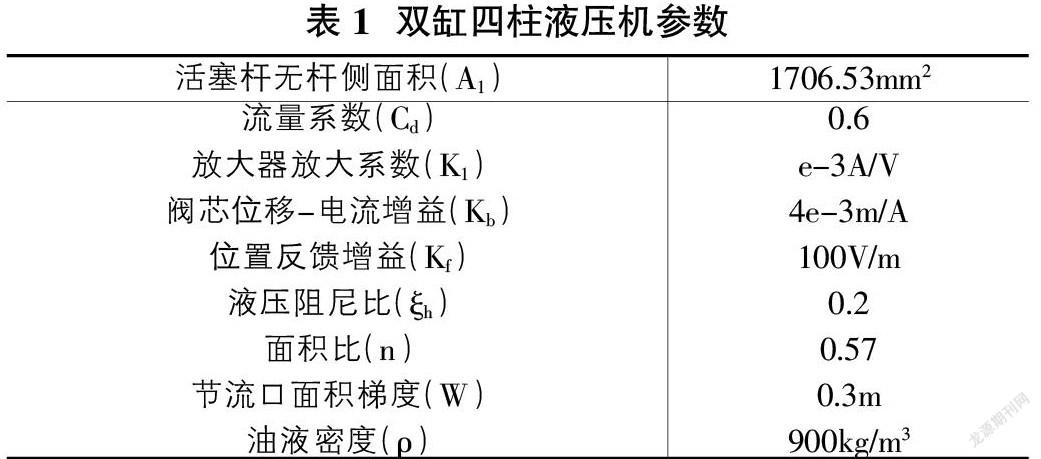
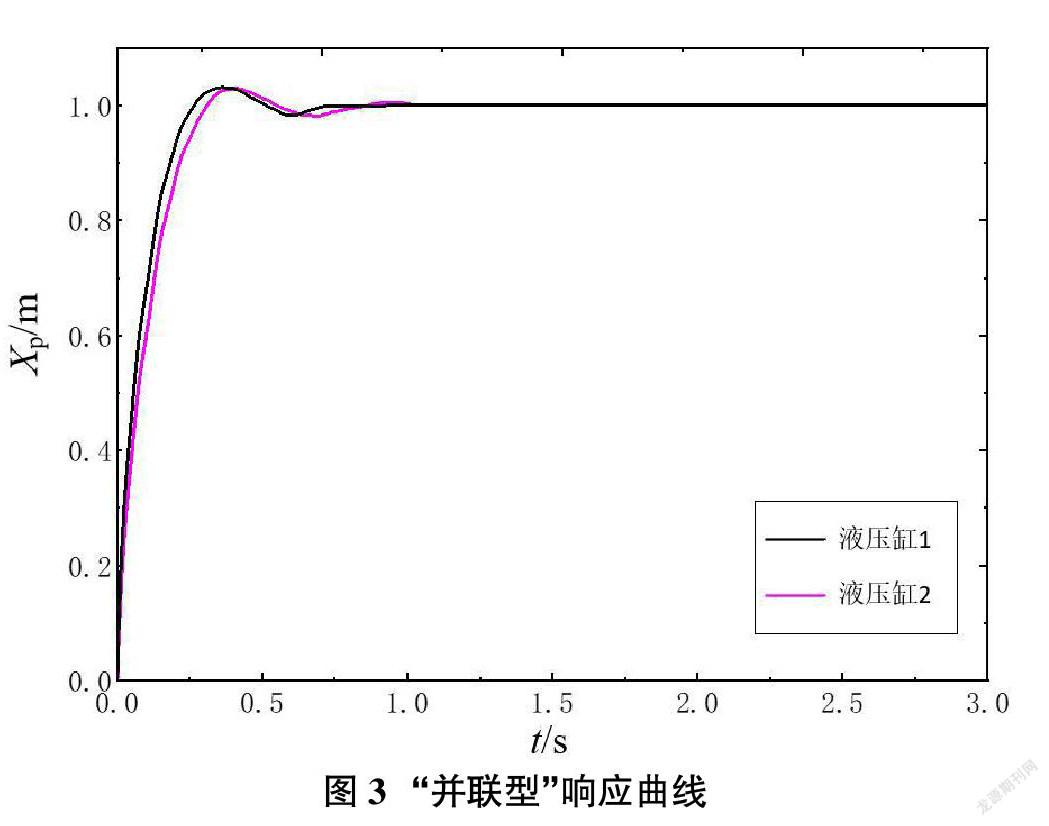
对“并联型”仿真模型添加阶跃信号,运行仿真结果如图3所示。同样采用最大同步误差及稳态同步误差两个指标对仿真结果进行评价,如表3所示,最大同步误差为0.11mm,稳态同步误差为0.03mm。因此,“并联型”对于最大同步误差和稳态同步误差的控制效果优于“串联型”。因此“并联型”更能提高双缸同步控制精度。
3 结论
为提高双缸同步控制系统控制精度,在建立系统数学模型基础上,利用改进的萤火虫算法对系统中的PID参数进行了优化,基于“串联型”和“并联型”同步控制结构在MATLAB/simulink中建立了仿真模型,将“串、并联”仿真结果进行了对比,主要得出以下结论:“并联型”对于最大同步误差和稳态同步误差的控制效果优于“串联型”。因此“并联型”更能提高双缸同步控制精度。
参考文献:
[1]李洪龙,逄波.双缸四柱液压机同步控制系统的研究[J].机床与液压,2019,47(02):92-95,101.
[2]张明锐,陈喆旸,韦莉.免疫萤火虫算法在光伏阵列最大功率点跟踪中的应用[J].电工技术学报,2020,035(007):1553-1562.
[3]顾忠伟,徐福缘.一种新颖的萤火虫算法求解PID控制器参数自整定问题[J].系统管理學报,2017,026(001):101-106.
[4]杨韩峰,郭彦青,张宏,等.基于电磁换向阀的液压缸位置控制系统研究[J].机械设计与制造工程,2020(2):101-104.
[5]李海军,王雷,康冰冰.基于灰色预测理论的双液压缸同步控制研究[J].机床与液压,2020,48(21):102-105.
[6]逯建琦,南建国,王伟.基于萤火虫算法的无人机组网多径路由算法[J].电子测量与仪器学报,2020,34(09):74-81.
[7]杨蕾,李胜男,黄伟,等.永磁同步发电机自适应分数阶PID控制设计[J].电力系统保护与控制,2020,048(009):49-58.
[8]张美满,包雄关.基于模糊PID控制器的海上风电机系统仿真模拟[J].船舶工程,2020,42(03):130-133,140.
[9]胡学芝,徐唐河.基于自适应模糊PID控制的电子皮带秤研究[J].2021(5):1-4.
[10]潘冬.基于改进PID控制的数控机床主轴动态特性监测研究[J].自动化与仪器仪表,2020(12):39-42.
[11]杨鸿镔,刘海峰,王浒,等.基于外特性前馈和模糊控制反馈的发动机冷却系统控制策略研究[J].内燃机工程,2020,41(03):68-76,85.
[12]郭威,崔宇琛,郭建军.模糊控制技术在静脉输液速度控制中的应用效果研究[J].护理研究,2020(10):1723-1726.
[13]苏红丽.模糊控制在采摘机器人控制优化中的应用[J].农机化研究,2021,43(10):202-206.
[14]张超,何湘宁.非对称模糊PID控制在光伏发电MPPT中的应用[J].电工技术学报,2005(10):76-79.
[15]沙宝银.液压支架试验台远程多缸同步控制系统设计[J]. 工矿自动化,2018,044(002):28-31.
[16]富强.一种基于电液比例技术的液压支架试验台同步控制系统,CN106706349A[P].2017.
[17]毛君,郭浩,陈洪月.新型萤火虫算法及在刮板输送机伸缩机尾PID控制中的应用[J].机械科学与技术,2018(9):1366-1371.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
电脑知识与技术(2016年22期)2016-10-31
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
物联网技术(2015年12期)2015-12-28
现代电子技术(2015年22期)2015-12-02
现代电子技术(2015年15期)2015-08-14
物联网技术(2015年5期)2015-07-18
- 内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench