
起重平台稳性计算方法
2021-10-28 06:37:56曹晓航冯士伦张宝瑜沈钰集毛建斌
中国海洋平台 2021年5期
曹晓航, 冯士伦, 张宝瑜, 沈钰集, 毛建斌
(1. 中交天津港湾工程研究院有限公司, 天津 300222; 2. 天津大学 建筑工程学院, 天津 300350;3. 海洋石油工程(青岛)有限公司, 山东 青岛 266000; 4. 海洋石油工程股份有限公司, 天津 300451)
0 引 言
船舶稳性是船舶主要的航行性能之一,是衡量船舶安全性的重要指标。对于海洋平台来说,其工作环境与载荷类型十分复杂,稳性计算不仅关乎自身的安全性,而且影响着工作项目的进展及工作人员的生命财产安全。随着海工行业的发展,起重平台迎来了黄金发展时期,其应用领域十分广泛,工作条件更为复杂,对自身稳性和安全性要求更高。鉴于此,起重平台的稳性研究获得了大量的关注。
鲁华伟[1]通过水池模型试验研究系泊-大型起重船-索具-大型上部组块耦合系统运动响应特性,得到某起重船的自身固有周期和黏性阻尼系数。陈鹏飞等[2]针对福建海域复杂施工条件下起重船运动响应研究相对较少的情况,以作业于福建海域的某海上风电起重船为研究对象,对其在时域和频域范围内的运动响应进行研究。晁世方等[3]介绍风电安装平台吊重丢失稳性衡准要求,运用NAPA软件对平台的吊重丢失稳性计算方法进行分析。冯旭等[4]提出一种运用Moses软件对自升式平台进行完整稳性和破舱稳性分析的方法,研究平台许用重心高度、危险风向角和危险破舱组合等数据。桂满海[5]介绍起重船的稳性衡准,运用NAPA软件计算风压横倾力矩和最小倾覆力臂,并把其应用于起重船相应衡准中。李彤宇等[6]利用NAPA软件的二次开发功能开发计算起重船作业状态稳性衡准数的方法。刘晓等[7]基于中国船级社(CCS)的规范要求,研究自升式风电安装船在浮态作业时起吊重物前后的稳性变化,分析总结自升式风电安装船浮态起重作业的稳性计算方法。陈书敏[8]研究对称与非对称半潜式起重生活平台的稳性,从完整稳性、破损稳性和失钩稳性等3个方面叙述并研究国际海事组织(IMO)、美国船级社(ABS)和挪威船级社(DNV)的稳性规范,建模计算并比较结果差异。葛慧晓等[9]结合蓝鲸自航全回转起重船的稳性分析结果,对有关起重船稳性衡准准则进行比较和分析,探索性地提出起重船稳性衡准建议。
在目前的平台稳性计算中,完整稳性与破舱稳性的研究相对较多,而起重稳性的计算相对较少。本文针对起重平台提出一种运用Moses软件计算平台起重作业下稳性的方法,该方法可解决吊物计算的繁琐性,清晰明了,只需在.cif文件里添加起重计算的命令流,便可获得平台起重作业下的稳性结果,结果文件查询十分方便,可为平台起重稳性计算提供一定的参考价值。
1 起重稳性要求
对于起重平台的工作状态来说,起重作业状态分为常规起吊状态和吊重脱钩状态。下面介绍2种状态下的稳性要求。
1.1 常规起吊稳性要求
在常规起吊状态下,吊重与吊钩正常连接,按照《国内航行海船法定检验技术规则》[10],起重船需满足:
(1) 初稳心高hGM
(1)
式中:Mf为风压横倾力矩;Mh为旋转式起重船起吊倾覆力矩;Ml为船舶不对称装载倾覆力矩;θc为极限静横倾角,在作业状态下对旋转式起重船不超过5°;Δ为排水量。
(2) 稳性衡准数K
(2)
式中:lq为最小倾覆力臂;lf为风压横倾力臂。
(3) 根据《海上移动平台入级规范(2016)》[11]静水力相关要求,在典型起重作业状态静水力曲线中,面积(A+B)≥1.4(B+C),如图1所示。

注:θL,C为静平衡角;θ1为倾覆力臂曲线与复原力臂曲线第1交点所对应的倾角;θF,C为进水角;θ2为倾覆力臂曲线与复原力臂曲线第2交点所对应的倾角图1 常规起吊状态静水力曲线
1.2 吊重脱钩稳性要求
对于起重平台漂浮起重作业,在发生起吊荷重突然跌落情况时还应满足:
(1) 起吊荷重失去后的静平衡角θE,D应不超过15°;
(2) 自第1交点至进水角θF,C、第2交点或30°中较小角之间的剩余面积(图2中的面积A1)应不小于图2中面积A2的1.3 倍,即A1≥1.3A2。
2 计算方法
2.1 船型概况
以某实际自航自升式风电安装平台为例进行计算。该平台由船体、四桩腿、升降系统和起重机组成,主尺度参数如表1所示。

注:RM1为无起吊荷重下的复原力臂曲线;RM2为有起吊荷重下的复原力臂曲线;HM1为无起吊荷重下由反向压载引起的倾覆力臂;HM2为有起吊荷重下由起吊荷重与压载联合作用引起的倾覆力臂;θF,D为进水角、第2交点对应倾角或30°中的较小者;θE,D为起吊荷重失去后反向压载引起的静平衡角;θL,D为有起吊荷重与反向压载联合作用下的静平衡角图2 吊重脱钩状态静水力曲线

表1 自航自升式风电安装平台主要参数
在Moses建模中,采用笛卡尔右手坐标系:坐标原点取艏垂线、舯纵剖线与基平面相交处;x轴沿船长方向,正向指向船尾;y轴沿船宽方向,正向指向右舷;z轴沿型深方向,向上为正。
2.2 起重计算
利用Moses软件进行平台起重作业下的稳性计算时可直接使用完整稳性与破舱稳性模型,起重作业工况大致分为起吊初始工况、舷外横吊90°工况、舷内横吊90°工况、艉吊180°工况,每种工况又分为10%油水舱装载与100%油水舱装载。选取舷外横吊90°、10%油水舱装载工况为例进行计算说明。图3为该工况下的Moses模型。
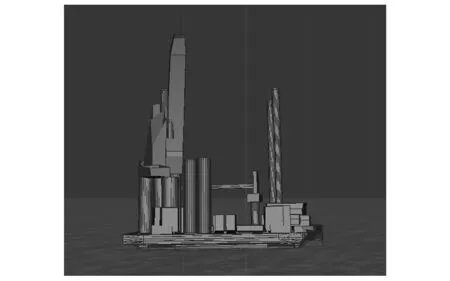
图3 Moses模型侧视图
为得到规范中的各项值,根据起重作业2种状态在各工况下计算正常起吊、吊重脱钩后、吊重脱钩后反向压载等3种情况的模型。在计算文件中添加命令流来实现吊重是否脱钩:&set DROP=.true.为吊重脱钩工况;&set DROP=.false.为正常起吊荷重工况。
对每种工况进行稳性校核。
选取常规起吊情况计算结果文件中的某一段,如表2所示。
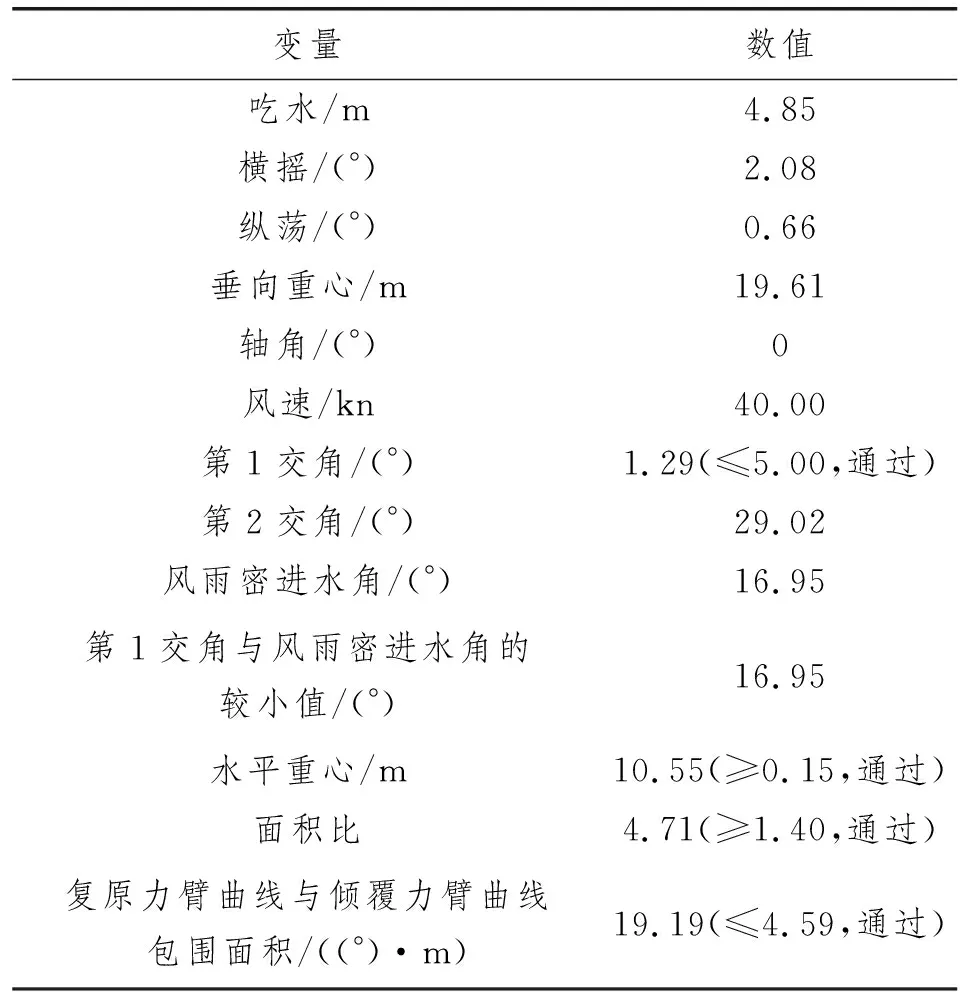
表2 常规起吊计算结果
(1) 初稳心高衡准值和稳性衡准数可通过式(1)和式(2)得出。稳性衡准数K为1.9,大于1.0;初稳心高衡准值hGM为7.13 m,与结果文件中的初稳心高(10.55 m)比较可知,计算结果满足起重作业工况下的完整稳性要求。
(2) 倾覆力臂曲线与复原力臂曲线第1 交点所对应的倾角(1.29°)可由软件计算得到,其小于甲板边缘入水角、进水角或起重机作业最大允许倾角中的较小值(5°),满足要求。
(3) 自倾覆力臂与复原力臂曲线第1 交点至第2 交点、进水角和30°三者最小值之间的复原力臂曲线与起吊倾覆力臂曲线包围面积(19.19)可由软件计算得到,换算后为0.33 rad·m,大于0.08 rad·m,满足规范要求。
(4) Moses软件中静水力曲线与《海上移动平台入级规范(2016)》中的曲线相同。由软件计算可直接得到面积比为4.71,大于1.40,满足规范要求。
表3为起吊荷重突然失去工况的计算结果。

表3 起吊荷重突然失去工况计算结果
由表3可知,起吊荷重失去后的静平衡角为2.83°,小于15.00°,满足规范要求。
对于每个装载和作业条件下起吊荷重突然跌落工况而言:在起吊荷重突然失去工况下可从软件计算结果得到θL,D和RM1曲线、x=θL,D、x轴围成的面积S1;在吊荷突然失去反向压载工况下可得到θE,D和RM1曲线、x=θL,D、x轴围成的面积S2,θE,D所对应的HM1值;在起吊荷重突然失去反向压载工况下可从软件计算结果得到θF,D和RM1曲线、x=θF,D、x轴围成的面积值S3。由此可计算:
A2=S1+θL,DHM1+θE,DHM1-S2
(3)
A1=S3-S2-(θF,D-θE,D)HM1
(4)
式中:θL,D可直接由表3计算结果得到;θE,D可由起吊荷重突然失去反向压载工况的结果文件得到;θF,D、HM1、HM2可由软件计算结果直接得到。
最终得出结果A1/A2≥1.3,满足规范要求。
在Moses软件的计算过程中,只需要添加相应命令流就可从结果文件清楚查到每个横摇角度的复原力臂、复原力矩、倾覆力臂、倾覆力矩、稳性衡准数、初稳心高、第1交角、面积比与面积范围等数据,较好地为起重平台稳性计算提供数据基础。
3 结 论
提出一种使用Moses软件对起重平台起重作业下稳性进行计算的方法,得到以下结论:该计算过程可在完整稳性与破舱稳性的模型基础上进行,方便快捷;所介绍的方法结合起重平台校核规范与Moses自身算法,可从软件计算结果中直接得到想要的数据,不需要进行多余计算,有效可行;Moses软件的建模过程方便快捷,运用命令流可进行建模与程序编写,从结果文件查找各种数据也十分迅速;国内通过Moses软件计算起重平台稳性相对较少,本文介绍的方法具有一定的参考价值。
基于起重平台稳性规范,对多个工况进行稳性校核,与船舶操作手册数据相符合,证明所提出的Moses计算方法能够有效计算平台起重作业稳性,可为平台设计和稳性计算校核过程提供一定的借鉴。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:36:58
科学技术与工程(2021年14期)2021-07-29 02:07:28
山东水利(2021年1期)2021-03-26 08:20:30
机械工程师(2020年2期)2020-03-02 05:14:52
探索科学(学术版)(2019年3期)2019-02-06 05:22:54
水能经济(2017年10期)2017-10-19 00:54:18
海洋工程装备与技术(2017年5期)2017-03-05 09:49:39
船海工程(2015年4期)2016-01-05 15:53:30
江苏农业科学(2015年3期)2015-07-31 13:21:40
电子设计工程(2014年17期)2014-02-27 12:00:03
