
基于L1 自适应理论的AUV深度控制器设计
2021-10-27 08:58霍江航姜向远栾义忠马晓静
中国舰船研究 2021年5期
霍江航,姜向远,栾义忠,马晓静
山东大学 海洋研究院,山东 青岛 266237
0 引 言
自主式水下航行器(AUV)是一种自带动力源,能够在水下自主航行作业的无人潜航器。因其安全性高、可靠性强,且不受有线电缆的限制,目前已经广泛应用于海洋开发、海底检测等领域。在AUV 各种应用场景中,例如,水下地形勘测或者海底铺设管道检查等,都需要稳定的深度控制,因此定深航行成为一种常用的航行状态。但AUV 在水下作业中会因为移动速度或者水域环境差异的影响而使机体模型参数发生改变,这将导致运动模型产生不确定性,而且水下还存在复杂持续的外部环境干扰,这些问题一方面对AUV 的定深稳定作业产生了不良影响,另一方面也对AUV 深度控制器设计的抗干扰性和鲁棒性提出了更高的要求。
为了保证AUV 水下运动的稳定性和控制精度,多种控制算法被应用于AUV 系统,例如传统PID 控制方法及其改进算法[1-3]、神经网络法[4]、基于线性二次调节器(linear quadratic regulator, LQR)的控制方法[5]、滑模控制方法[6]、自适应控制方法[7]等。传统PID 控制方法有着良好的鲁棒性和瞬态响应,但是对外界环境的干扰无法做出快速有力的应对。运用LQR 的AUV 控制方法虽然可以实现运动过程中能耗与响应效果的平衡,实现对AUV 的最优化控制,但是需要对AUV 模型进行精确建模,且当AUV 模型参数发生改变时会使控制效果发生较大偏差。滑模控制具有优秀的鲁棒性可以抑制模型变化产生的偏差,但会在控制系统中产生抖动,因而常和其他控制方法结合应用来改善控制效果。
自适应控制的强适应性可以对AUV 水下运动中受到的不确定干扰做出有效应对,模型参考自适应控制(model reference adaptive control,MRAC)通过辨识系统中的未知参数,并根据辨识出的参数调整控制率来消除外界环境对被控对象的干扰,使得被控模型闭环系统的输出可以跟随理想参考模型的输出,提高了系统的抗干扰能力。但是传统的MRAC 会在高自适应增益的情况下出现高频震荡控制信号,针对这个问题Cao 等在2006 年提出了L1 自适应控制理论[8-9]。该控制方法是在MRAC 基础上在反馈环中引入低通滤波器结构对高频信号进行过滤,使L1 自适应控制器的输出能够保持在低频范围内,解决了控制器自适应速率与鲁棒性表现之间的耦合问题,使闭环系统能够在保证动态性能的同时具有良好的鲁棒性,提高了系统的渐进稳定性与可控精确度。基于输出反馈的L1 自适应控制器通过分段常数自适应率与低通滤波控制信号,保证了系统输入/输出信号具有一致的性能边界,且可以通过减少积分步长使得闭环自适应系统与理想系统之间的误差足够小,系统地提高控制器性能。目前L1 自适应控制理论应用在水下航行器上的研究尚处在起步阶段,Wu 等[10]与Sarhadi 等[11]均在REMUS AUV 的俯仰通道上设计了基于状态反馈的L1 自适应控制器并进行了仿真,证明了L1 自适应控制器可应用于AUV 纵向姿态控制,也验证了L1 自适应控制器的抗干扰能力。Wu 等[10]结合AUV 执行器考虑了控制量的饱和问题,增加了补偿器,但未进行实验来验证控制器性能。Maalouf 等[12-13]将L1 自适应控制器与自适应非线性状态反馈控制器(adaptive nonlinear state feedback controller,ANSF)分别应用于遥控潜水器(AC-ROV)并进行了对比试验,结果表明,L1 自适应控制器拥有更快的自适应速度。Maalouf 等的控制器是在未考虑模型推进器的情况下设计的,且AC-ROV 模型与REMUS AUV 应用场景不同,模型差别较大,仅具有一定的参考价值。
为提高AUV 在水下作业中的抗干扰能力与鲁棒性,使AUV 能够更稳定地定深航行,本文从REMUS AUV 纵向控制模型出发,拟设计一种基于输出反馈的L1 自适应控制器。首先,进行AUV 的动力学建模,以及从六自由度非线性模型中提取出简化的纵向控制线性模型的条件与表达式。然后,介绍基于输出反馈的L1 自适应控制器的结构与设计。在Matlab/Simulink平台上,将L1自适应控制器与PID 控制器应用于REMUS AUV 纵向控制模型,对不同情景条件下的仿真结果进行分析。最后,总结L1 自适应控制器的动态响应效果,抗干扰性与鲁棒性表现,分析L1 自适应控制器优于PID 的原因以及未来可以尝试的一些改进方向。
1 AUV 纵向动力学模型
本文使用2 个坐标系:惯性参考坐标系E-XYZ(固定)和载体坐标系O-xyz(运动)对AUV 进行动力学建模,坐标系与AUV 之间的关系如图1所示。图中:φ,θ, ψ分别为AUV 在惯性参考坐标系下与3 个轴的夹角;l,v,w与p,q,r分别为AUV在载体坐标系3 个轴上的线速度与角速度;MK,MM,MN与Fx,Fy,Fz分 别 为AUV 在 载 体 坐 标系3 个轴方向上的力矩与力。

图1 AUV 动力学模型与2 个坐标系的关系图Fig. 1 Body-fixed frame and earth-fixed frame
假设载体坐标系原点在AUV 的浮心O,为让模型更具有一般性,AUV 重心G不与载体坐标系原点重合,(xG,yG,zG)为AUV 重心G的坐标,由动量定律和动量矩定律,可写出AUV 六自由度动力学方程为:

2 基于输出反馈的L1 自适应控制
2.1 L1 自适应控制器结构
L1 自适应控制器是在MRAC 的体系结构基础上,在反馈环增设了一个低通滤波器来滤除高频控制信号,基于输出反馈的控制器中闭环自适应系统和参考系统之间的输出误差可以通过减小积分步长而变得任意小,实现对理想参考系统的渐进跟踪。故基于输出反馈的L1 自适应控制器可以在参数不确定的情况下控制线性系统,同时保证低频的控制量[8-9,15]。
本文设计的基于输出反馈的L1 自适应控制器由理想参考模型、自适应律、控制律3 个部分组成,自适应控制器的优点就是对被控系统动态变化过程中产生的不确定性与干扰表现出强适应性。根据前文建立的AUV 模型可以表达为:

式中:u(s) 为控制量输入u(t) 的拉普拉斯变换;y(s)为系统输出y(t)的拉普拉斯变换;G(s)为AUV实际模型传递函数;d(s)为外界扰动d(t)=f(t,y(t))的拉普拉斯变换,其中f(.)为未知映射。为使时变外界干扰d(t) 有界且为控制器设定稳定性条件,映射f(.) 需要满足以下要求:存在常量Ld>0,使得在任意时刻t>0 时对所有的y1,y2满足以下关系式:

L1 自适应控制器结构如图2 所示,其中r为输入信号;u为控制量;Am,Bm,CmT为理想模型传递函数M(s)的状态空间方程的最小实现;y˜=yˆ−y,为理想输出与实际输出之间的误差值;x˙ˆ为理想参考模型状态; σˆ为自适应参数组成的向量,其维数与Bm相 同; Φ(T), µ(iT)为 组 成 自 适 应 律 的 方 程;C(s)为C(0)=1 的低通滤波器;T为采样时间;i=0,1,2,···n,i与采样时间T结合代表运行时间;I为单位矩阵。

图2 基于输出反馈的L1 自适应控制器结构图Fig. 2 L1 adaptive output feedback control structure
L1 自适应控制器中的控制量u(t) 的设计目标是:即使存在外界干扰与被控模型参数的不确定性,控制器依然能够使系统输出y(t)跟踪给定连续参考输入信号r(t)。这一目标可以通过设计理想的参考模型来实现,即

式中:M(s) 为极点实部均小于零的稳定传递函数;r(s) 为输入信号r(t) 的拉普拉斯变换;y(s)为系统输出y(t) 的拉普拉斯变换。为了实现设计目标,可将式(4)中的AUV 模型改写为:

2.2 闭环系统稳定性分析
理想的闭环系统设计目标是可以消除干扰对系统稳定性的影响,理想闭环系统可以写成如下形式:

如此设计可以使被控系统的稳态与瞬态性能一致有界得到保证。
2.3 理想参考模型
设计理想参考模型状态空间表达形式为:

对式(16)进行拉普拉斯变换,可以得到

2.4 自适应率
自适应率设计的目的是在保证理想参考模型输出yˆ(t)跟 随被控对象输出y(t)的条件下对控制变量进行修正。因为Am是理想模型传递函数M(s)的状态空间方程的最小实现,故Am的根均具有负实部,存在正定的对称矩阵P与正定矩阵Q满足李雅普诺夫方程式:
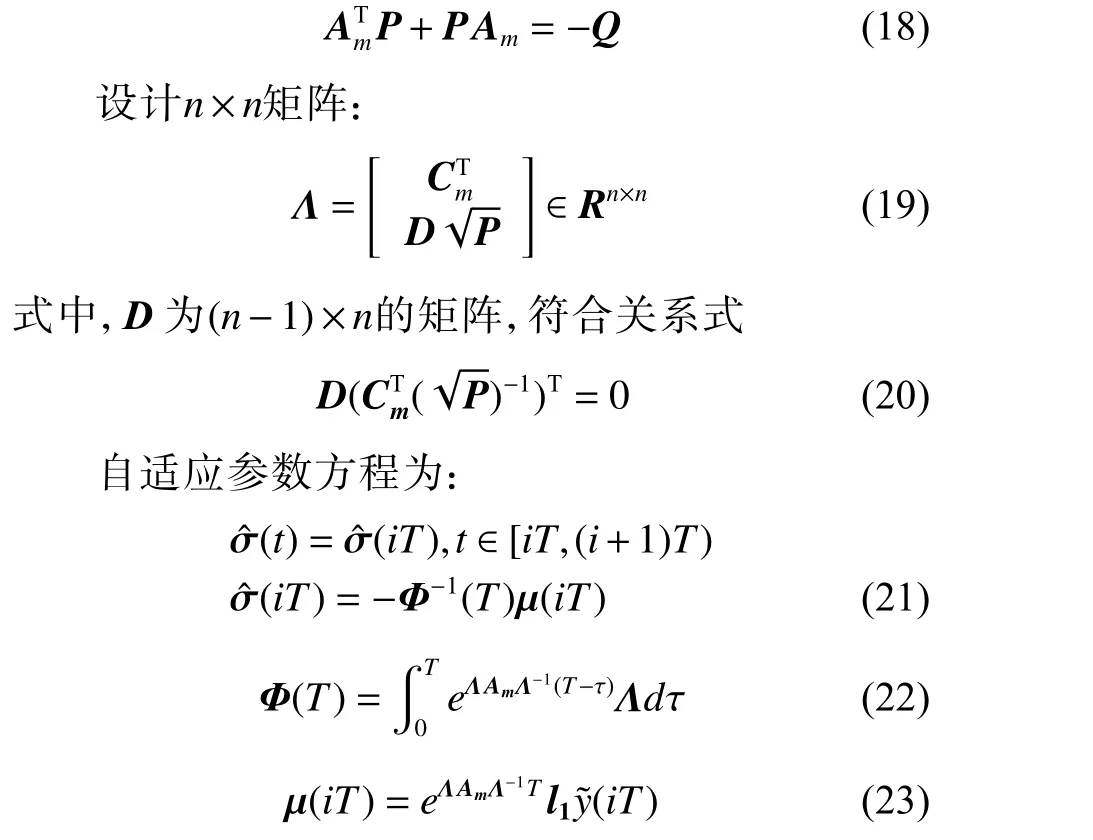
式中,l1为首项为1 其余位均是0 的向量。在处理器性能允许情况下积分步长越小,理想模型输出对实际模型输出的追踪效果越好,闭环系统和理想参考系统之间的差值可以达到任意小。控制器稳定性分析与式(9)和式(16)的匹配证明在文献[15]中有详细描述。
2.5 控制率
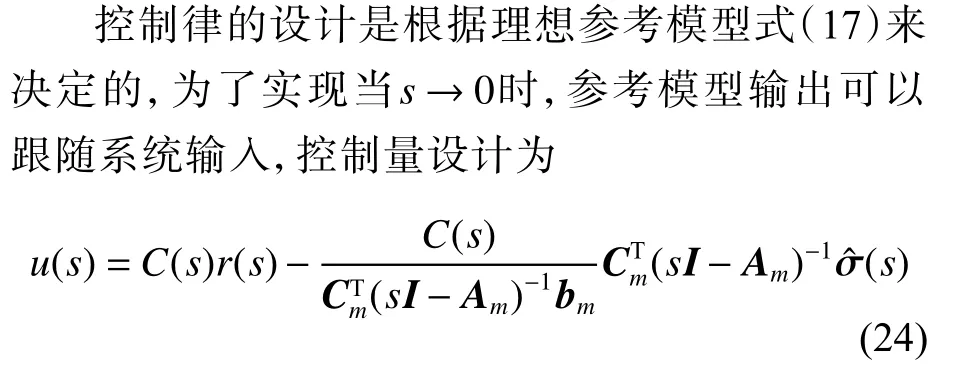
控制率的设计使控制量随自适应参数 σ(t)的变化而不断调整,在保证实际被控模型输出y(t)保持与理想模型输出yˆ(t)相同的情况下还能够追随输入信号r(t),即实现式(6)。
3 仿真及分析
为验证L1 自适应控制器良好的动态特性、抗干扰能力以及鲁棒性,使用Matlab R2019a/Simulink 平台搭建传统PID 控制器和L1 自适应控制器,并分别应用于AUV,从动态特性与抗干扰效果2 个方面进行对比分析,并改变AUV 模型参数进行L1 自适应控制器的鲁棒性分析。
仿真使用REMUS AUV 为被控对象,选取文献[14] 中水动力系数搭建AUV 模型,REMUS AUV 具体模型参数见表1。

表1 REMUS AUV 的标称参数Table 1 The nominal parameters values of the REMUS AUV
仿真实验中,T=0.000 1 s,总时间为50 s,航速3 kn,假设AUV 初始纵倾角与初始纵倾角速度均为0。根据模型状态空间方程式(3),代入REMUS AUV 标称参数,在AUV 航行定速l=1.54 m/s条件下,可以得到AUV 的纵向控制模型的状态空间方程:

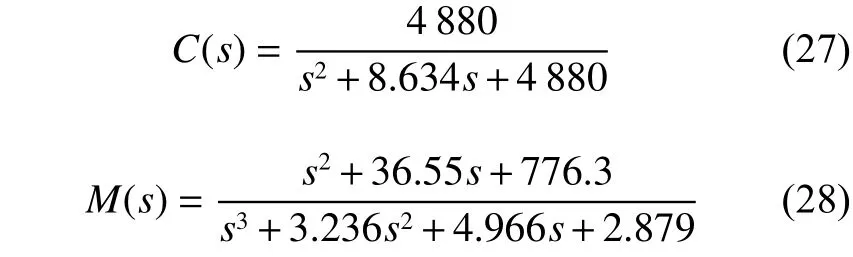
根据前文控制器设计要求,闭环系统中的C(s),M(s)的选择需要同时满足C(0)=1,H(s)稳定性和式(15),参考文献[16]中对L1 自适应控制算法在导弹纵向控制中的参数调整过程,选择合适的极点得到:
传统PID 控制器采用串级结构对AUV 的深度变化进行控制,内环为对纵倾角 θ的PID 控制器,外环为对惯性环节的P 控制器。串级控制模型如图3 所示,内环PID 控制器参数经过试凑调整设定为(KP_in=20,KI_in=1,KD_in=4),外环P 控制器参数设定为(KP_out=0.5)。


图3 深度通道串级PID 控制结构Fig. 3 Depth-plane PID control system
分别进行输入信号为阶跃信号、正弦信号情况下REMUS AUV 应用L1 自适应控制器与PID控制器的动态响应仿真实验并对比。AUV 系统的深度z、纵倾角θ 与纵倾角速度q在阶跃信号与正弦信号输入的动态响应仿真对比情况如图4~图6 所示。无干扰情况下2 种控制器的动态响应的性能指标对比如表2 所示。假设存在外部干扰,根据海浪幅值响应公式[17],在低海况等级情况下,选取随机有义波高与仿真频段进行多谐波叠加来模拟随机海流对AUV 产生的纵向扰动。扰动可表示为

在仿真实验第10 s 加入干扰,2 种控制器的深度控制抗干扰仿真效果及抗干扰性能指标对比结果分别如图7 和表2 所示。假设被控对象模型参数发生变化,进行L1 自适应控制器在阶跃信号与正弦信号输入情况下的动态响应仿真实验,模型中水动力系数Mq˙发生a倍变化时动态响应曲线变化情况如图8 所示,模型中运动速度u发生变化时动态响应曲线变化情况如图9 所示。

图8 AUV 深度随模型参数 Mq˙的变化曲线Fig. 8 Dynamic response of AUV depth with different hydrodynamic force coefficient Mq˙

图9 AUV 深度随模型参数l 的变化曲线Fig. 9 Dynamic response of AUV depth with different speed l
综合分析以上仿真结果,可以得到以下结论:
1) 根据图4~图6 与表2 可以得知,L1 自适应控制器的动态响应性能优于PID 控制器,在阶跃信号输入情况下比PID 控制器有着更低的超调量和更快的响应速度,在正弦波信号输入情况下比PID控制器的峰值偏差更小。这归因于控制器中理想参考模型的设计,通过实际输出与参考输出之间的误差来调整自适应参数进而修改控制量,使实际系统可以追随理想模型的输出,表现出良好的动态性能。图4~图6 与表2 的结果说明了应用L1 自适应控制器的AUV 不仅具有实际可操控性,而且具有更高的控制精度。

图4 无干扰情况下AUV 深度的动态响应Fig. 4 Dynamic response of AUV depth without disturbance

图5 无干扰情况下AUV 纵倾角的动态响应Fig. 5 Dynamic response of AUV pitch without disturbance

图6 无干扰情况下AUV 纵倾角速度的动态响应Fig. 6 Dynamic response of AUV pitch velocity without disturbance

表2 无干扰下AUV 纵向姿态变化曲线的性能指标Table 2 Performance indexes of the two controllers without disturbance
2) 根据图7 与表3 可以得知,在引入随机海流干扰后,L1 自适应控制器比PID 控制器表现更稳定,可以精确追随输入信号。这归因于L1 自适应控制器的设计前提中考虑了干扰,并通过设计控制率平衡了干扰的影响,使得整个系统即便存在外界干扰,其闭环系统依然等价于设计的理想参考模型。图7 与表3 的结果证明了L1 自适应控制器有着比PID 控制器更强的抗干扰能力,可以在复杂外界干扰情况下保持良好的控制效果。

图7 外部环境干扰下AUV 深度的动态响应Fig. 7 Dynamic response of AUV depth with disturbance

表3 外部干扰下AUV 深度变化曲线的性能指标Table 3 Performance indexes of the two controllers with disturbance
3) 根据图8 与图9 可以得知,当阶跃信号作为系统输入时,水动力系数Mq˙的减小和速度l的增加对AUV 深度通道动态响应没有产生明显影响;但当水动力系数Mq˙增 大到1.5 倍或速度l减小至1 m/s 时,AUV 深度通道动态响应曲线开始出现波动。当正弦信号作为系统输入时,水动力系数Mq˙与速度l的改变没有对AUV 深度通道动态响应产生明显影响,AUV 深度响应仿真曲线几乎重合。这归因于L1 自适应控制器的设计将被控对象的参数变化视为干扰进行处理,因此可以获得良好的鲁棒性表现。图8 与图9 的结果说明了L1 自适应控制器在模型参数发生一定程度变化时可以保持AUV 系统动态响应的稳定,但是在持续激励信号的作用下控制器的鲁棒性更好。
综上所述,仿真结果证明了L1 自适应控制器的设计使其拥有比PID 控制器更好的动态响应与抗干扰能力,同时证明了L1 自适应控制器在被控对象模型出现一定偏差时仍然可以保证控制的效果。
4 结 语
本文针对AUV 深度控制中面临的干扰大、参数不确定的问题,提出了一种基于L1 自适应控制理论的控制器设计方案。仿真结果表明,无外部干扰的情况下,L1 自适应控制器的动态响应更好。若存在持续外部环境干扰,L1 自适应控制器比传统PID 控制器拥有更强的抗干扰能力。当AUV 模型参数发生一定程度变化时,L1 自适应控制器可以保持动态响应的稳定,而且当输入信号是持续激励信号时系统的鲁棒性更强。基于输出反馈的L1 自适应控制器将建模中的参数不准确与外界干扰统一归为扰动,在足够小的积分步长下,通过分段常数自适应率与低通滤波控制信号使实际闭环系统接近理想参考系统,使系统在具有良好动态响应的情况下具有比PID 更好的抗干扰能力和优秀的鲁棒性。这种方法为复杂环境下AUV 稳定作业的控制器设计提供了一种方案,不仅保证了系统在参数变化下的鲁棒性而且增强了系统的抗干扰能力。后续可以对该控制算法进行改进,优化算法在非持续激励信号输入下的动态响应表现,进一步改善AUV 定深航行作业的鲁棒性效果。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
军民两用技术与产品(2022年3期)2022-06-05
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
科技研究·理论版(2021年22期)2021-04-18
网络空间安全(2019年8期)2019-03-18
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
