转速电流双闭环控制的异步电机串级调速系统研究与仿真
2021-10-11 06:48张厚升朱胜杰孟宪鹏杜钦君
山东电力技术 2021年9期
张厚升,朱胜杰,孟宪鹏,杜钦君
(1.山东理工大学电气与电子工程学院,山东 淄博 255049;2.山东鲁能软件技术有限公司,山东 济南 250001)
0 引言
目前,世界范围内的能源已经变得相对匮乏,尤其是电力资源,在智能制造2025、工业4.0、节能减排等时代背景下,积极提高能源利用率、提高安全生产率对我国经济的发展具有重要战略意义[1-2]。绕线式异步电机作为非常重要的动力机械装置在工业、农业、航海、航天等领域应用都十分广泛。一些大型的矿用电机、风机、水泵的电力拖动均采用大容量的三相绕线式异步电动机[3]。这一类的异步电机也是耗电量最多的电气设备,异步电动机通常处于定速运行状态,当电机所带负载突变时,一般通过改变阀门的流量来实现,但是这种方式耗能较多。到2020年底,全国的总发电装机容量为21 亿kW 左右,仅大容量的泵类、风机类负荷消耗的电能大约为5 亿kW,如果采用电机调速系统进行流量的调节,那么能节约的电力预计有1.5 亿kW,与6 个长江三峡水电站的装机容量相当。因此对于异步电机的节能技术进行研究具有非常重要的现实意义。
对于绕线转子异步电动机来说,传统的调速方法是在其转子回路中串入电阻进行调速,这种调速方式属于转差功率消耗型调速[4-6],虽然装置简单、成本较低,但是耗能多,效率较低。随着控制理论与控制技术、电力电子技术的飞速发展,现代绕线转子异步电机的调速方式通常采用串级调速或者双馈调速[7-9],本文针对绕线转子异步电机,分析串级调速系统的工作原理,设计转速电流的双闭环控制系统,并对所设计的串级调速系统进行仿真验证。
1 双闭环串级调速系统的工作原理
所设计的绕线转子异步电机双闭环控制串级调速系统的原理如图1 所示。图中,A1为二极管不控整流器,Ud是A1整流得到的直流电压,A2为晶闸管有源逆变电路,Uβ是由A2产生的直流附加电动势,亦即逆变电动势,ASR 和ACR 分别是转速调节器和电流调节器,TA 是电流互感器,TG 为测速发电机,T 为变压器,Ld为平波电抗器,为了使调速系统实现转速、电流的无静差调节,同时也能获得较快的动态响应,ASR和ACR都采用了PI调节器。
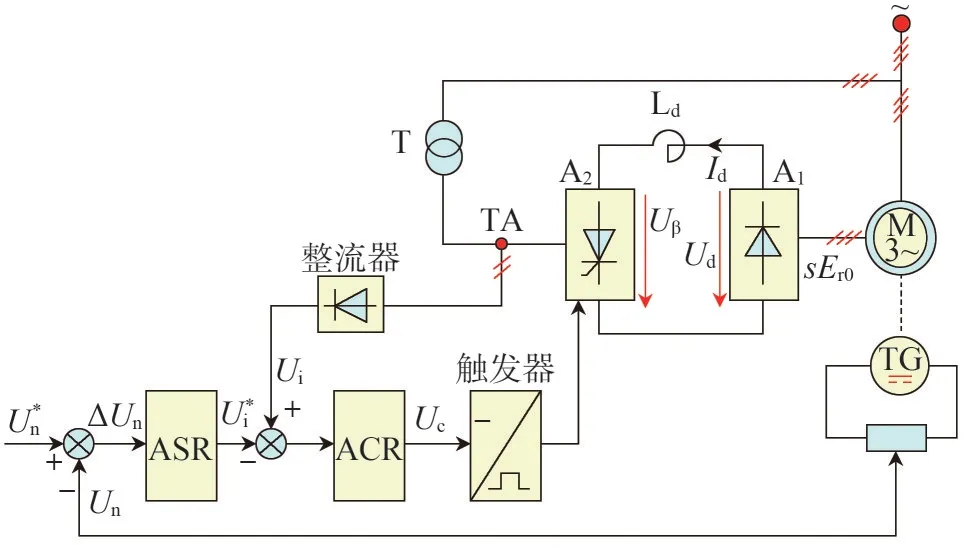
图1 双闭环控制的串级调速系统原理
通过改变转速给定信号的大小,可以实现转速的设定与调整,例如,当的值变大时,电流调节器ACR 的输出电压Uc也将逐渐增加,使A2装置的逆变角β逐渐增加,Uβ逐渐减小,异步电动机的转速n也就会逐渐升高,当电流调节器ACR的输出电压Uc=0时,整定触发脉冲,使逆变角为β=βmin,以防止逆变颠覆,通常βmin=30°,此时,对应的转速最低,随着电流调节器ACR 输出电压的增大,逆变角β增大,Uβ减小,转速上升,当β=90°时,Uβ=0,相当于串级调速系统不起作用。
利用ASR 的输出限幅环节作用和ACR 的电流负反馈作用,在异步电机加速过程中,也可以实现恒流升速过程,从而使串级调速系统也具有较好的加速特性。需要升速时,首先增加给定电压信号的值,经触发器的调节作用,使逆变角β变大,直流电流Id(异步电动机电流)增大,从而实现电机的加速,由于限幅环节的作用,在加速的过程中,异步电机能保持所设的、恒定的最大加速转矩。随着异步电机转速的上升,转速反馈电压Un增大,与给定电压信号相比较,重新进行闭环系统的调节,最后异步电机稳定运行在与给定电压设定值相对应的较高转速值上。
2 转速电流双闭环控制系统设计
2.1 双闭环系统的动态结构图
根据串级调速系统的等效电路及其动态电压平衡方程,可以得到异步电机转子直流回路的传递函数为[3]
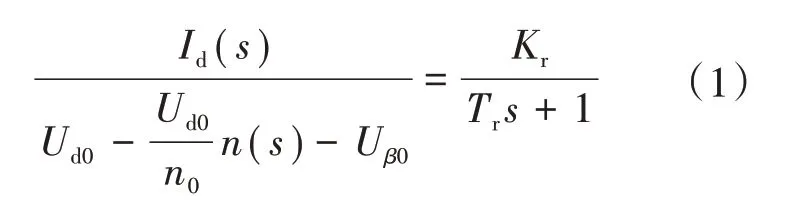
式中:Ud0是当转差率s=1时转子整流器输出的理想空载电压,Ud0=2.34sEr0,Er0为转子相电压有效值;Uβ0是逆变器输入的理想空载直流电压;Kr是转子直流回路的放大系数,,R是转子回路总电阻;Tr是转子直流回路的时间常数,,L是转子电路的总电感;n是电机转速,n0是理想空载转速。定义串级调速系统的电动势系数CE=,串级调速系统的转矩系数CM=,串级调速系统的机电时间常数TM=,其中G是系统转动部分的重力;D2是系统转动部分的回转直径的平方,假设负载转矩TL对应的转子直流电流为IL,由此可以得到异步电机的近似线性模型

根据晶闸管知识可知,晶闸管的触发和整流装置可以看作是一个纯滞后环节,其近似的传递函数可以表示为

式中:Ks、Ts分别为晶闸管逆变器的放大系数和时间常数,Ks可以表示为转子整流电压的最大值Uβ0与逆变器控制电压的最大值Ucmax的比值,Ts可以取为0.001 7 s。
鉴于电流检测信号中常含有交流分量,因此需要对其进行滤波,同时也为了防止干扰信号的窜入,在电流反馈通路中加入一个电流反馈滤波器,其传递函数可以表示为

式中:kfi、Toi分别为电流反馈系数和电流滤波时间常数,Toi一般取1~2 s。
同理,在转速反馈通路中也加入相应的转速反馈滤波器,其传递函数可以表示为

式中:α、Ton分别为转速反馈系数和转速滤波时间常数。另外,为了补偿反馈环路中的惯性作用,在前向通路中,也相应加入了对应的惯性环节,即给定滤波器[3]。
对于转速调节器ASR 和电流调节器ACR,均采用PI调节器,其传递函数可以表示为:


式中:K1、τ1分别是转速PI调节器的比例增益和超前时间常数;K2、τ2分别是转速PI调节器的比例增益和超前时间常数[10]。
综合以上各个环节,可以得到图2 所示的绕线异步电机串级调速系统的双闭环控制结构框图。图中,K1、τ1、K2、τ2等参数属于待定参数。
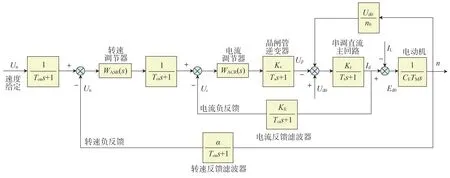
图2 转速电流双闭环控制串级调速系统近似动态结构
2.2 电流环的设计
双闭环控制串级调速系统的设计采用工程设计方法[3,11],先设计电流内环,然后把电流环看作是转速环中的一个环节,再进行转速外环的设计。
电流环的设计按照典型Ⅰ型系统进行设计[10,12],由于串级调速系统转子直流主电路中,R和L都是转速n的函数,所以放大系数Kr和时间常数Tr也都是转速n的函数,不是常数,所以电流环是一个非定常系统。设计时,按照调速范围的下降smax、Kr、Tr来计算电流调节器的参数。因为突加转速给定电压时,由于异步电机的机械惯性比较大,转速来不及变化的时候电流调节器已经完成了调节过程,也就是说,电流的调节过程是在异步电机处于静止状态或者处于某一低速下,而且异步电机的转速还来不及变化的时候进行的。所以,应该按照最低速时Kr和Tr来计算ACR 的参数[5],只要保证异步电机的升速过程具有较好的动态性能,则降速的时候异步电机的动态性能同样也能具有较好的动态性能。
为校正方便,忽略反电动势的影响,将电流给定滤波和反馈滤波移至负反馈环内,并将系统变换成单位负反馈结构,将小惯性环节进行合并处理,按照工程经验值,即可将电流环等效成一个一阶惯性环节。
2.3 转速环的设计
考虑到串级调速系统对负载扰动的高抗扰性和转速无静差的性能要求,转速环按照典型Ⅱ型系统进行设计,由于异步电机环节中,非线性积分时间常数CETM是一个非定常参数,因此,设计时,可以选用与实际运行工作点电流值Id相对应的CETM值,然后按照定常系统的设计方法进行设计,这样经过校正后的串级调速系统就会尽可能接近满意的动态性能。
根据直流调速系统闭环幅频特性峰值Mrmin最小准则,取中频宽h=5,即可求得转速外环调节器的两个控制参数K1、τ1。
3 仿真验证
3.1 仿真参数
绕线转子异步电机建模、仿真使用的主要参数为:功率为40 kW,额定电压为380 V,频率为50 Hz,定子电阻为0.096 Ω,定子电感值为0.000 86 H,转子电阻为0.058 Ω,转子电感值为0.000 86 H,互感为0.031 H,转动惯量为0.4 kg·m2,额定转速1 500 r∕min。三相供电电源为380 V、50 Hz的交流电,滤波电感值为10 mH。转速调节器的比例放大系数为17.42,积分系数为11.5,电流调节器的比例放大系数为4.17,积分系数为41.66。电流反馈系数为0.05,转速反馈系数为0.006 7。
3.2 仿真验证
转速给定值设为10 V,对应异步电机的转速为1 500 r∕min,仿真算法取ode23tb,仿真时长为3.0 s。假若系统空载启动,1 s 后带载300 N·m。对串级调速系统按文中参数进行建模仿真可得图3—图6 的仿真波形。这4 个仿真波形分别给出了绕线转子异步电机串级调速系统在空载起动、加载过程中电机转速n、电磁转矩Te、逆变器输出相电压uan和线电压uab的仿真波形。
从图3和图4中可以看出,串级调速系统空载启动时,由于转差很大,异步电机转子的电压也会相应较高,直流回路中的电流相应也会比较大,导致系统起动时的电磁转矩比较大,在0.5 s左右,异步电机达到额定转速1 500 r∕min,此转速即为异步电机的理想空载转速,此时电磁转矩下降为零。
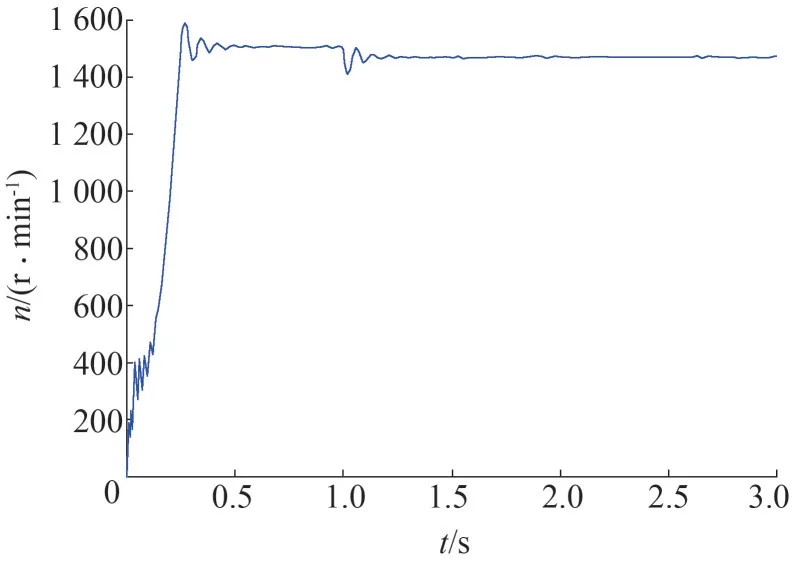
图3 转速n的仿真波形
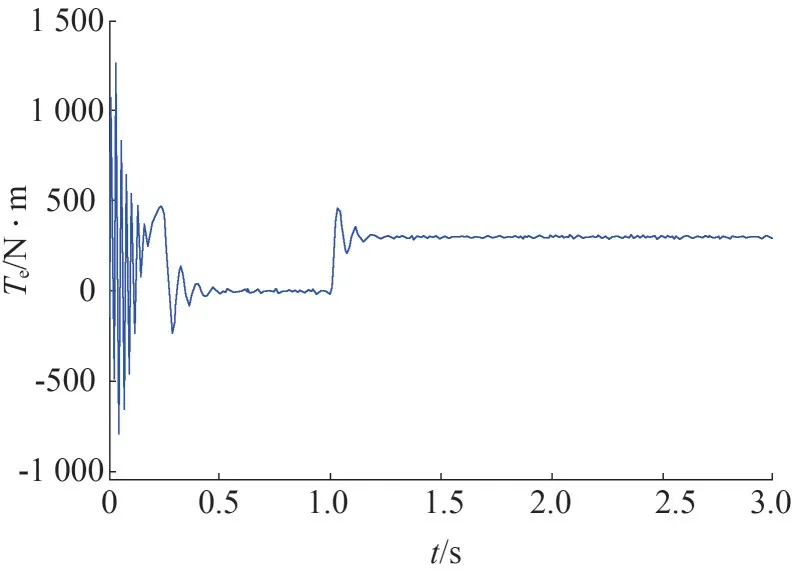
图4 电磁转矩Te的仿真波形
在t=1 s 时,系统突然加上负载300 N·m,异步电机的转速立即下降,电磁转矩相应增加并稳定在300 N·m 时,异步电机进入稳态工作状态,异步电机的转速同时稳定在1 475 r∕min,异步电机转子的电压保持为197 V。
在系统空载至带载并稳定运行的过程中,逆变器的a 相相电压uan的仿真波形如图5 所示,对其进行傅里叶分析可得其谐波畸变率(Total Harmonic Distrotion,THD)为0.12%,波形的正弦程度比较好,逆变器的线电压uab的仿真波形如图6 所示,对其进行傅里叶分析可得其THD为12.78%。
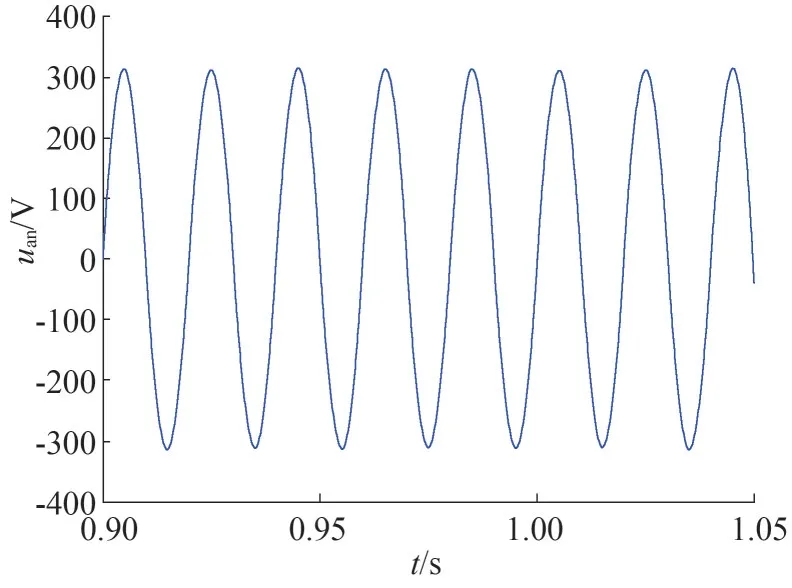
图5 逆变器输出的相电压波形
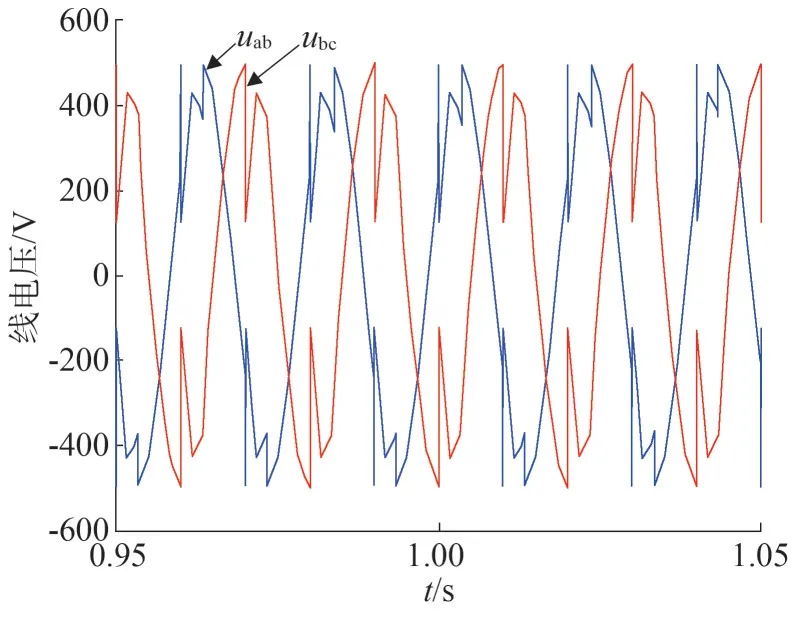
图6 逆变器输出的线电压波形
4 结语
研究、设计了转速双闭环控制的绕线转子异步电动机的串级调速系统,该调速系统启动时具有较大的启动转矩,有利于异步电机的快速启动,转矩在整个动态调节过程中,比较平滑、快速,系统动态调节的时间比较短,当异步电机突加负载时,该串级调速系统能快速并平稳的进行调节并进入稳定状态。该串级调速系统回馈电网的电压为380 V、50 Hz 的交流电,并呈现正弦波,系统THD 为12.78%,电能质量较高。因此双闭环控制的异步电机串级调速系统也是一种比较理想的调速系统。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2021年6期)2022-01-17
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子技术与软件工程(2020年10期)2020-02-01
汽车电器(2019年9期)2019-10-31
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18