变电站多机器人协同巡检区域划分与路径规划
2021-10-11 06:48张永涛
山东电力技术 2021年9期
张永涛
(国网河南省电力公司周口供电公司,河南 周口 466000)
0 引言
机器人的应用实现了工作模式的转变,提高了工作效率,促进了电网的发展[1-2]。变电站巡检机器人极大地解放了人力,使变电站设备运维效率得到提升,但在大幅度节约运维成本、实现无人值班管理模式的运维实效、提升设备及电网的安全水平等方面,仍需做出实质性突破[3]。结合国家电网有限公司《设备侧泛在电力物联网顶层设计》相关文件要求,对于巡检机器人应满足自动导航定位、巡检任务管理、数据智能分析等多层次需求[4]。
多机器人系统包括任务分配、路径规划和协同控制等诸多关键技术,其中,多机器人协同巡检区域划分与路径规划相关算法是一个研究难点[5]。目前,变电站机器人巡检路线优化通常是针对单机器人巡检问题开展研究,根据变电站整体环境建模方式的不同,常用的巡检区域建图方法有可视图法、拓扑地图法和栅格地图法3 种。可视图法以变电站机器人巡检点为研究对象,将变电站机器人巡检路线规划转化为旅行商问题进行求解[6-8];拓扑地图法以巡检点连接形成的巡检道路为研究对象,构造几何图形,采用图论中中国邮递员问题相关算法规划巡检路线[9-11];栅格地图法将变电站环境划分为多个矩形栅格,不同栅格颜色表示所在区域是否有障碍物,采用群体智能算法对机器人局部巡检路线进行规划[12-14]。当巡检点数量较多或巡检区域面积较大时,为了尽快完成巡检任务,通常采用多机器人协同作业的方案[15-16]。韩宇星等[17]将巡检区域的划分包含在路线优化过程中,通过在协同蚁群算法中设置共享禁忌表、引入代价竞争机制,实现不同蚁群间的信息传递,完成巡检区域的分割和路线优化。刘文兵等[18]采用K-means 聚类算法对无人机的目标点进行聚类,利用改进遗传算法对各区域巡检路线进行规划。上述研究主要完成了不规则分布巡视点的区域划分和巡检路线优化问题,但变电站内机器人巡检点主要沿巡检道路进行分布,以巡检道路为研究对象的变电站多机器人协同巡检策略未见相关研究。变电站多机器人巡检路线规划常用的方法是每个机器人独立完成一个设备区的巡检任务,但基于设备区巡检的方案易造成有些区域机器人很快完成巡检任务处于闲置状态,而个别区域长时间无法完成巡检任务,导致整体巡检时间过长[10]。变电站整体巡检效率除了与单个机器人的路线设置相关外,还与巡检区域的分割方式有关。巡检任务划分不均衡导致巡检机器人不能充分利用是降低巡检效率的重要因素。
以遍历所有巡检道路、巡检作业时间最短为优化目标,综合考虑巡检距离和巡检点数量的影响对变电站巡检区域进行均衡划分,完成巡检路线优化设计,以提高变电站机器人协同巡检作业的效率。
1 模型建立
设给定的变电站巡检区域内,共有L条巡检道路{l1,l2,…,lL},每条巡检道路上巡视点的数量为Xi(i=1,2,…,L),每条巡检道路的长度为Y(ii=1,2,…,L),使用N个巡检机器人{n1,n2,…,nN}协同巡检。巡检机器人的起始位置固定,要求机器人完成巡检任务后返回充电房,当所有带巡检点的巡检道路完成一次巡检,机器人的巡检任务完成。忽略机器人巡检作业时在转弯和掉头上花费的时间,最优巡检方案可表示为下列优化问题求解:

式中:K为机器人整体巡检时间;tj为机器人nj的巡检耗时;sj为机器人nj的巡检总路程;v为巡检过程中机器人的行驶速度,取0.3 m∕s;mj为机器人nj巡检路线上巡视点的总数量;Δt为机器人巡检一个点位所花费的时间,取5 s。
2 变电站机器人位置及巡检道路的设计
将变电站设备区各间隔巡视点的数量就近折算到巡检主干道上,某220 kV 变电站机器人巡检道路拓扑如图1 所示,将巡检道路长度、各巡检道路上巡检点数量以及度为奇数的节点在图中进行标记。
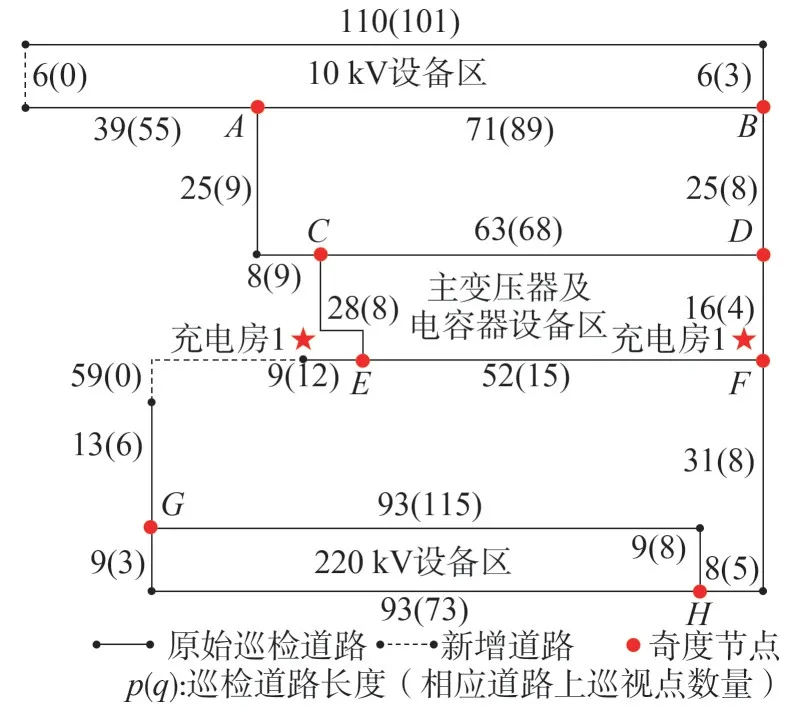
图1 某变电站机器人巡检道路拓扑
巡检区域可划分为220 kV 设备区、主变压器及电容器设备区、110 kV 设备区。模型中设置两台巡检机器人,其充电房的位置位于主变压器及电容器设备区两侧。对巡检道路进行补充,形成更多的“田”字形、“目”字形结构,尽量采用闭环方式,避免断头路,从而节省机器人巡检行走路程,提高机器人巡检路线优化空间[19]。
3 巡检区域划分与路线规划
3.1 巡检区域划分
根据图1 中奇度节点的位置,将巡检区域划分成区域1 和区域2,设置3 种巡检方案。不同巡检方案下,区域1分别包含2个奇度节点、4个奇度节点、6个奇度节点,3种方案下的区域划分与奇度节点配对如图2—图4所示。
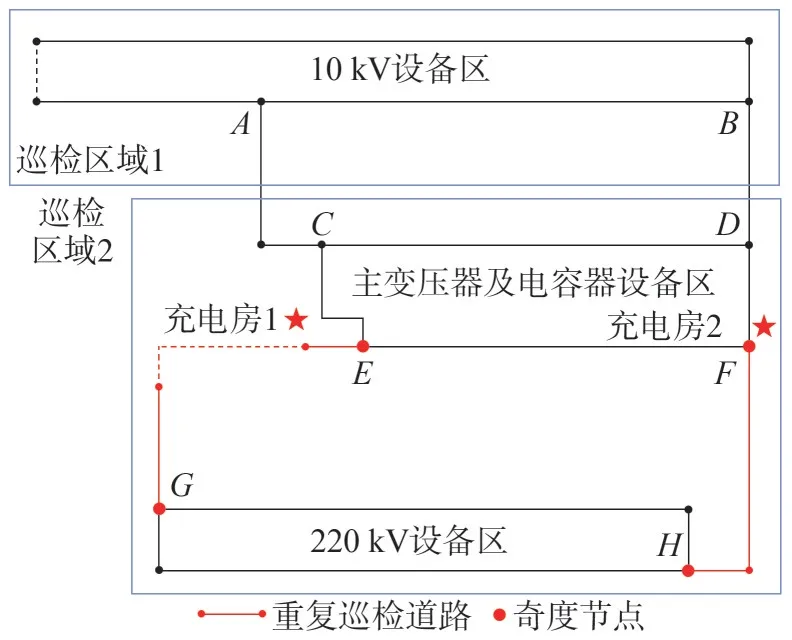
图2 方案Ⅰ巡检区域划分与奇度节点配对
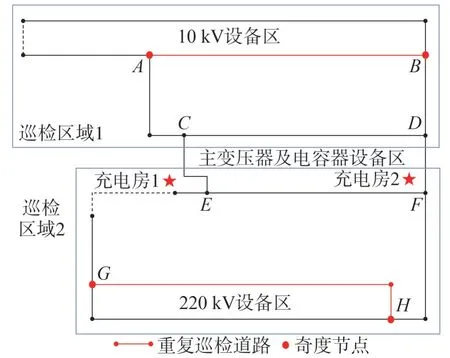
图3 方案Ⅱ巡检区域划分与奇度节点配对
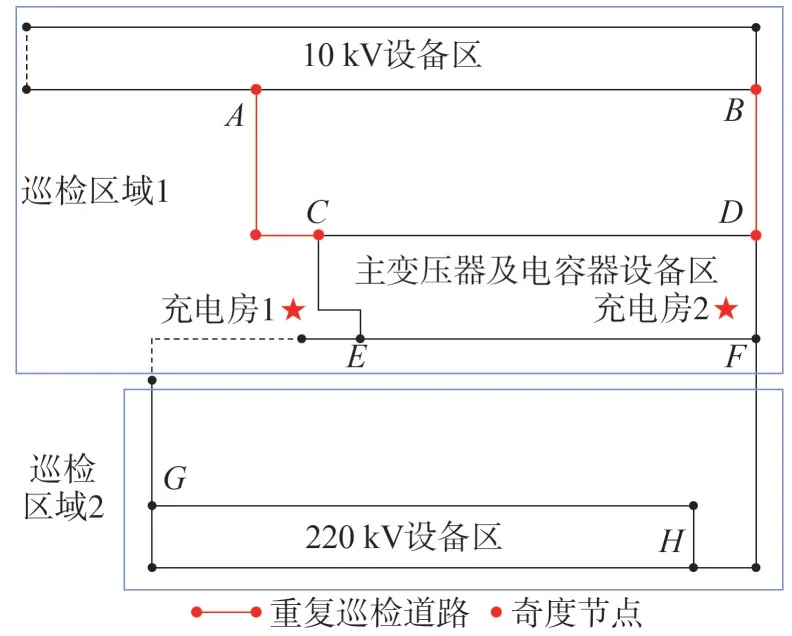
图4 方案Ⅲ巡检区域划分与奇度节点配对
3.2 巡检路线优化
为了保证机器人在各自作业区域内巡检路线最优,首先对不同方案下机器人重复巡检路线进行优化,然后对机器人整体巡检路线进行设计。
3.2.1 奇度节点配对优化
欧拉图从连通图的任意顶点出发,每条边恰能经过一次又能回到出发点,即不重复地行遍所有的边再回到出发点,相应的回路称为欧拉回路[20]。若连通图中含有奇度节点,需要对奇度节点两两配对,构造欧拉图。对各巡检区域内的奇度节点重新标注,采用枚举法对奇度节点进行配对优化[7]。方案Ⅰ中奇度节点的配对结果为:E—G、F—H,方案Ⅱ中奇度节点的配对结果为:A—B、G—H,方案Ⅲ中奇度节点的配对结果为:A—C、B—D,如图2—图4所示。
3.2.2 巡检路线规划
Fleury 算法是在欧拉图上求欧拉回路的一种方法,其基本原理是:每到一点,沿着该点的关联边中未走过的一条边走,只有当没有其他选择时,才选未走过边所导出的子图的割边。采用Fleury 算法对各机器人巡检路线进行规划,不同方案下各机器人巡检路线如图5—图7 所示,重复巡检路线与奇度节点配对结果一致。
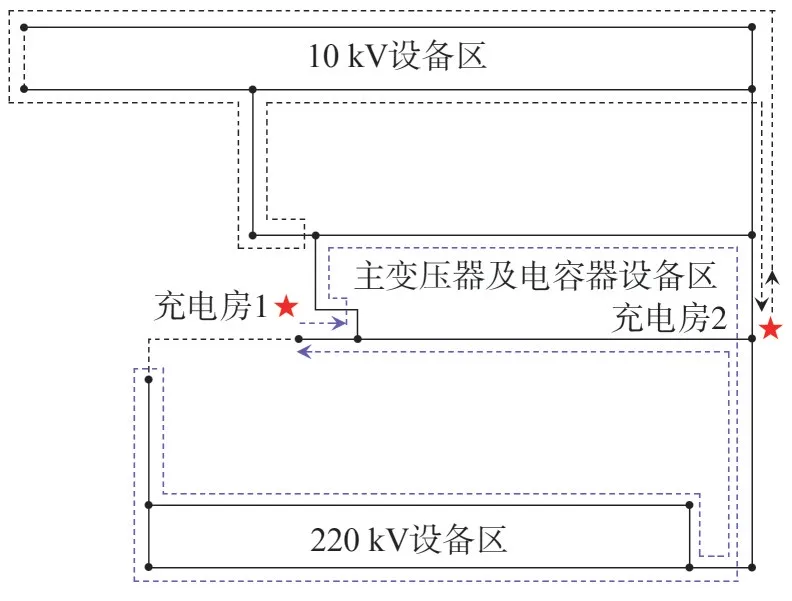
图5 方案Ⅰ巡检路线规划
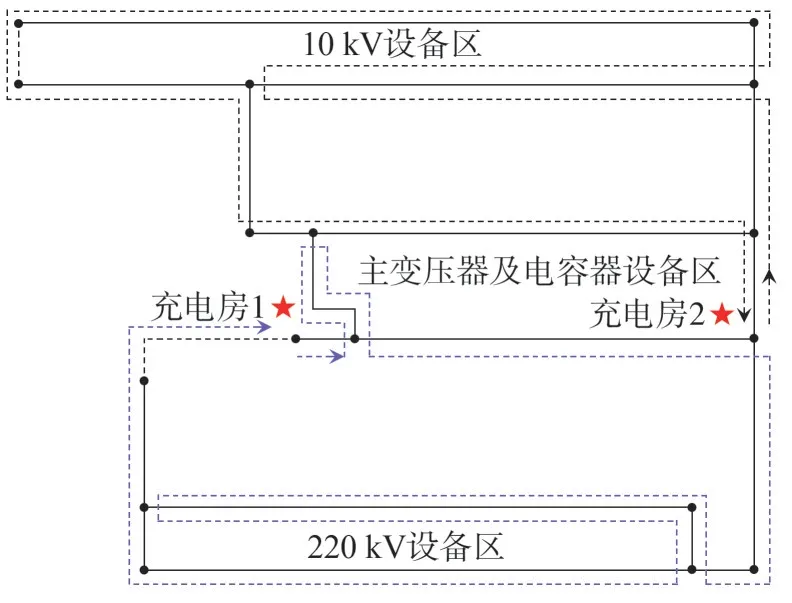
图6 方案Ⅱ巡检路线规划
3.3 优化结果对比分析
将变电站各间隔的巡检路线长度就近折算到巡检主干道,对不同巡检方案下各机器人巡检距离及各区域巡视点数量进行统计,如表1所示。
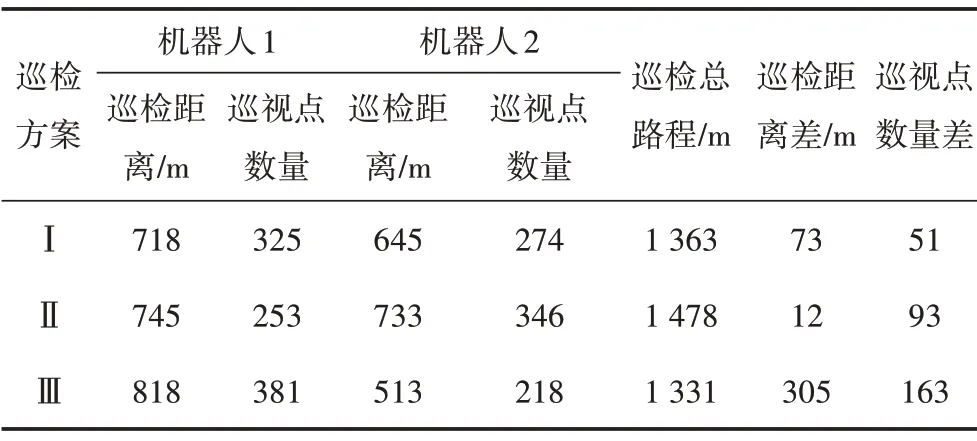
表1 不同机器人巡检数据对比
由于巡检道路设计和机器人充电房位置的影响,除了规划的重复巡检道路外,不同方案下机器人重复巡检道路各不相同,方案Ⅰ出现了不同机器人巡检路线重叠现象,方案Ⅱ中机器人在补充巡检道路上行驶的距离最长。由于方案Ⅱ巡检区域划分过程中,将主变压器及电容器设备区进行了拆分,虽然机器人巡检总路程最长,但各机器人巡检距离差最短,巡检路程的分配最为均衡。
与220 kV 设备区相比,110 kV 设备区巡检范围更大,巡检点的数量也更多。与其他巡检区域划分方案相比,方案Ⅰ各区域巡检点数量差最少,巡检点数量的分配更加均衡。
采用公式(1)对不同巡检方案下各机器人的巡检时间进行统计,如表2 所示。将不同方案下各机器人最长巡检时间作为巡检任务的完成时间,从表中可以看出方案Ⅱ各机器人巡检时间差最短,机器人闲置率最低;但从巡检任务完成时间来看,方案Ⅰ略优于方案Ⅱ。
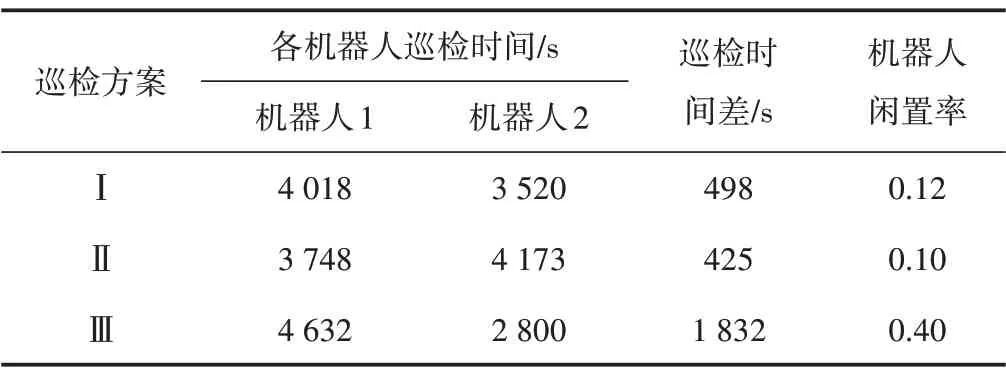
表2 各方案巡检时间对比
4 巡检路线冲突的解决与充电房选址
文献[5]针对多机器人协同巡检路径规划问题,提出了基于优先级的交通规则和基于定时等待的交通规则,避免多机器人由于巡检路线重合造成的冲突。将红绿灯规则应用于多机器人协同巡检,增加了巡检系统的复杂度。根据本文提供的巡检区域划分与路径规划方法,对各机器人巡检路线进行设计,不会存在巡检路线交叉的情形。
从方案I规划得到的巡检路线来看,当多机器人协同巡检存在路线冲突时,一台机器人首先巡检有冲突的区域,另一台机器人则避开冲突区域,利用时间差来避免机器人协同巡检作业时发生冲突。
充电房合理的选址一方面可以减少巡检机器人的行走路程,另一方面也可以避免多机器人巡检作业时发生冲突,同时也方便巡检机器人开展缺陷定点跟踪、事故应急特巡等任务,提高巡检机器人工作效率。针对方案I 规划的巡检路线,建议充电房1 布置在主变压器及电容器设备区,充电房2 布置在110 kV设备区。
5 结语
根据某220 kV变电站巡检机器人巡检道路拓扑图中奇度节点的位置,对机器人巡检区域进行划分。通过对各巡检区域内奇度节点进行配对优化,采用Fleury 算法完成各机器人巡检路线规划。综合考虑各机器人巡检路程及各区域内巡检节点数量两个因素,对巡检区域划分的合理性进行评价。
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
青年歌声(2020年12期)2020-12-23
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
小学生导刊(低年级)(2016年8期)2016-09-24
读写算·高年级(2015年1期)2015-07-25