基于北斗三号的多区域实时动态授时服务系统
2021-09-23 07:01:02孙保琪刘嘉伟杨旭海
导航定位与授时 2021年4期
孙保琪,韩 蕊,刘嘉伟,张 喆,王 格,陈 亮,刘 娅,杨旭海
(1.中国科学院国家授时中心,西安 710600;2.中国科学院精密导航定位与定时技术重点实验室,西安 710600;3.山东理工大学建筑工程学院,淄博 255049; 4.中国科学院大学天文与空间科学学院,北京 100049)
0 引言
精密时间是保障现代社会正常运转和快速发展的重要技术基础之一,在通信、电力、金融、交通和航天等领域具有重要的应用[1]。全球导航卫星系统(Global Navigation Satellite System,GNSS)是重要的授时手段之一,具有全天时、全天候、全球覆盖等诸多优势。北斗三号基于码伪距观测值的基本授时服务精度优于20ns[2-3]。随着科学技术和社会经济的发展,新一代移动通信和物联网等领域对授时服务提出了更高精度、更低成本的需求。
载波相位观测精度比码伪距高2个数量级,是GNSS高精度应用的首选观测量。GNSS载波相位在时间频率领域的应用初期主要集中在远距离时间传递方面[4]。随着GNSS精密卫星轨道、卫星钟差等精密产品的普及和推广,以精密单点定位(Precise Point Positioning,PPP)和长基线单差为代表的载波相位时间传递技术逐渐发展成熟。尤其是PPP时间传递技术,由于不受距离限制,在协调世界时(Universal Time Coordinated,UTC)、国际时间比对等领域得到了广泛应用[5-6]。自从国际GNSS服务(International GNSS Service, IGS)组织启动实时服务以来,基于实时精密轨道和钟差产品的PPP实时时间传递和精密授时成为可能[7-8]。实现单站PPP精密授时需要将实时精密卫星钟差产品的参考时间归算到标准时间。文献[9]在2014年提出了将实时钟差归算到UTC(NTSC)开展精密授时服务(Precise Time Service, PTS)的概念。文献[10]基于国际GNSS监测评估系统(international GNSS Monitoring and Assessment System, iGMAS)跟踪站、分析中心和数据中心建成了PTS PPP授时原型系统,实现了亚纳秒量级的授时精度。文献[11-12]开展了类似的PPP授时研究工作。
PPP授时精度高,不受基线长度限制,具有较好的应用前景。但是PPP授时严重依赖实时卫星轨道和卫星钟差产品,尤其要求卫星钟差产品的参考时间实时精密、连续无缝地归算到标准时间。此外,PPP授时解算还需要进行复杂的系统误差改正和参数估计,对用户来讲具有较高的技术门槛和计算资源成本。
GNSS载波相位高精度应用的另一种常见场景是短基线相对定位,以实时动态(Real-Time Kinematic,RTK)定位技术最为典型[13]。短距离情况下,2台GNSS接收机的多项系统误差具有高度相关性。RTK定位充分利用这一特点,在基准站与用户(流动站)之间形成站星双差,基于载波相位观测值和广播星历解算用户位置,可实现厘米级实时定位。RTK定位已发展成为一种成熟的技术,广泛应用于工程建设、测绘生产、形变监测和精密农业等领域。
RTK授时与RTK定位的思想类似,在短距离情况下,时间用户与时间基准站(标准时间)之间基于码伪距和载波相位观测值形成站间一次差分,解算得到用户本地时间与标准时间之间的偏差,进而通过调整本地时间实现授时。传统RTK定位通常采用站星双差模式,而RTK授时为保留接收机钟差参数,采用站间一次差分(单差)的模式。所以,RTK授时本质上属于实时载波相位单差时间传递技术。与PPP授时相比,因为同样使用了载波相位观测值,RTK授时也可以实现亚纳秒量级的精度。此外,RTK授时仅需要广播星历,不依赖额外的精密产品,系统误差修正简单,实现起来更加简便易行。同时,由于RTK定位收敛时间较短,在此基础上实施RTK授时,收敛时间能够比PPP授时显著缩短。文献[14]在2010年提出了包含授时功能的4D RTK数学模型,并进行了性能分析。近年来,随着5G通信等技术的发展,RTK授时技术的相关研究逐渐增多[15-16]。文献[16]以GPS为例,基于2个月观测数据分析了GNSS RTK授时性能。文献[17-19]研究了基于RTK技术的时间传递。
总体来看,当前RTK授时研究主要基于GPS开展,基于北斗尤其是北斗三号新体制信号观测值的RTK授时研究鲜有报导。另外,RTK授时的原理决定了基于RTK模式的标准时间授时只能覆盖以个别城市为代表的单个区域局部范围。
为了能够在更大的范围内实现基于RTK模式的标准时间精密授时,提出了一种多区域RTK授时服务系统,能够在不相邻的多个城市区域同时开展标准时间RTK授时,有望为城市信息化建设等提供技术参考。依托中国科学院国家授时中心时间频率和卫星导航平台建立了原型系统,并基于多天的北斗三号观测值开展了试验验证。
1 RTK授时原理
1.1 数学模型
RTK授时中,基准站与用户对单颗导航卫星形成的单差码伪距和载波相位观测方程分别为
(1)
(2)

在站间单差观测值中完全消除了卫星钟差和卫星端硬件延迟等误差项。由于距离较近,电离层延迟和对流层延迟等空间相关性较强的误差项也可忽略不计。在实际处理中,还需要进行接收机天线相位中心修正。
1.2 参数估计
RTK授时具有实时性,采用扩展卡尔曼滤波进行参数估计。线性化后的状态方程及观测方程为
Xk=Φk,k-1Xk-1+Wk-1
(3)
Zk=HkXk+vk
(4)
式中,Xk为状态向量;Φk,k-1为状态转移矩阵;Zk为线性化后的观测值向量;Hk为设计矩阵;Wk-1为动态噪声向量;vk为观测噪声向量;过程噪声的方差记为Qk;观测噪声的方差记为Rk。
状态向量的最优估值及其方差-协方差为
(5)
Pk=(I-KkHk)Pk/k-1
(6)
其中,增益矩阵Kk为
(7)
(8)
预测值的方差-协方差Pk/k-1为
(9)
RTK授时中估计的状态向量参数包括接收机位置、相对钟差和载波相位模糊度。如果引入已知或通过RTK定位解算的接收机位置,则估计的状态向量中只包括相对钟差和载波相位模糊度参数。根据用户接收机动态性能的不同,接收机位置参数可以设置为动态参数和静态参数,分别对应不同的状态转移矩阵。
2 系统组成
多区域标准时间RTK授时服务系统由标准时间、高精度实时时间频率传递链路、时间基准站、数据中心、通信链路和时间用户等部分组成,如图1所示。标准时间为授时时间源,位于标准时间守时实验室。时间基准站有多个,根据区域范围大小每个区域有1~2个。时间基准站配备高性能原子钟和北斗/GNSS接收机,接收机外接高性能原子钟输出的频率和秒脉冲(Pulse Per Second, PPS)时间信号。通过高精度实时时间频率传递链路,高性能原子钟实时驾驭到标准时间。因此,时间基准站接收机时钟为复现的标准时间,可以作为基准对时间用户进行授时。
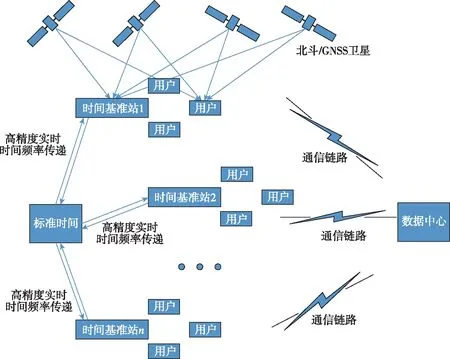
图1 多区域RTK授时服务系统逻辑架构Fig.1 Multi-region RTK time service system
高精度实时时间频率传递链路优先选取光纤双向时间频率传递技术,同时以GNSS载波相位时间频率传递技术为备份。
数据中心负责接收时间基准站北斗/GNSS实时观测数据,并以国际通用格式转发给时间用户,同时具有系统监控的功能。时间基准站与数据中心之间采用专线互联网进行通信,数据中心与时间用户之间采用移动或专线互联网进行通信。与时间基准站类似,时间用户也配备北斗/GNSS接收机,并以外接的用户本地时钟为接收机时间。时间用户从数据中心接收本区域范围内时间基准站的实时观测数据,结合本地观测数据和广播星历,通过RTK授时方法计算出本地时间与标准时间的偏差。
国家重大科技基础设施“高精度地基授时系统”的光纤授时网,可为本系统提供备选光纤双向时间频率传递链路和时间基准站。为了便于跟RTK定位协同工作,时间基准站也可以与RTK定位基准站并址建设。
3 试验验证
3.1 原型系统
为了验证其可行性,依托中国科学院国家授时中心临潼本部和西安场区的时间频率及卫星导航平台,建立了RTK授时原型系统,如图2所示。位于临潼本部的UTC(NTSC)作为标准时间源。西安场区时间实验室作为时间基准站,主钟为一台高性能被动型氢原子钟,通过光纤双向时间频率传递链路实时驾驭到UTC(NTSC)。SEPT为时间基准站北斗/GNSS接收机,外接氢原子钟10MHz和1PPS信号。XIA6和SE22为用户接收机,位于临潼本部测定轨大厅,均外接UTC(NTSC)10MHz和1PPS信号,且共用同一接收机天线。依托iGMAS西安数据中心/国家授时中心分析中心作为原型系统数据中心,通过NTRIP协议接收并转发时间基准站北斗/GNSS观测数据。3台接收机的型号均为Septentrio PolaRx5TR,天线型号为SEPCHOKE_B3E6。
3.2 时间基准站原子钟实时驾驭
时间基准站原子钟与UTC(NTSC)之间通过光纤双向时间频率传递技术进行实时比对[20],比对结果采样率为1Hz。根据比对结果,采用调频的方式将时间基准站原子钟驾驭到UTC(NTSC)。
图3所示为2020年第192天—第202天共11天的光纤双向时间频率传递结果,可以看出,时间基准站原子钟与UTC(NTSC)时间偏差峰峰值小于1ns,大部分时段在±0.2ns以内,标准差为0.13ns。结果表明,时间基准站原子钟能够以较高的精准度实时驾驭到标准时间。

图3 光纤双向时间频率传递结果Fig.3 The results of two-way optical time and frequency transfer
3.3 基于北斗三号的RTK授时
利用SEPT、XIA6和SE22这3台接收机的北斗三号卫星新体制信号B1C和B2a观测值开展RTK授时试验,分析验证RTK授时性能。观测数据时段为2021年4月19日—4月30日,对应年积日(DOY)为第109天—120天,共12天。除了以SEPT为基准站形成短基线授时外,还分析了以XIA6为基准站时SE22接收机的零基线授时性能。利用B1C/B2a双频观测值展开试验,涉及动态(kinematic)、静态(static)和固定站坐标(fixed)三种RTK授时模式,详细解算设置如表1所示。需要说明的是,本次RTK授时试验只解算了用户与时间基准站之间的时间偏差,没有进一步对用户时钟进行驾驭。

表1 RTK授时解算策略
3.3.1 短基线
SEPT与XIA6/SE22之间的基线长度为32.85km。以SEPT为时间基准站,SE22和XIA6为用户站的RTK授时结果如图4和图5所示。
图4 SE22短基线双频RTK授时结果Fig.4 SE22 short-baseline dual-frequency RTK timing results

图5 XIA6短基线双频RTK授时结果Fig.5 XIA6 short-baseline dual-frequency RTK timing results
时间基准站SEPT外接异地复现的UTC(NTSC)时间信号,SE22和XIA6直接外接UTC(NTSC)信号。这种场景的授时结果可以表征标准时间多区域RTK授时服务的性能。
从图4和图5可以看出,由于外接了同源的时间参考信号,SE22和XIA6接收机RTK授时结果的趋势基本一致。因为信号传输电缆较长,且经过多级频分和脉分设备,2台接收机外接时间信号的延迟在700ns左右。2台接收机12天的授时结果均比较连续稳定,不考虑收敛过程情况下峰峰值偏差约为1ns。由于没有进行校准,这里只统计授时结果的标准差,SE22三种模式短基线授时标准差分别为0.19ns、0.18ns和0.17ns;XIA6相应的值分别为0.18ns、0.17ns和0.16ns。
动态、静态和固定站坐标三种模式的结果趋势符合性较好。由于每个历元解算一组坐标参数,动态模式RTK授时结果噪声较大。固定站坐标模式收敛时间最短。授时结果图中显示,静态模式与动态模式收敛时间相当,但是通过查看解算参数的标准差可知,静态模式收敛速度比动态模式快约1倍。
3.3.2 零基线
SE22与XIA6之间构成共钟零基线。这种模式下,RTK授时结果表示2台接收机之间的硬件时延偏差。由于仅受观测噪声影响,共钟零基线模式可以衡量RTK授时能够达到的理想水平。以XIA6为基准站,SE22的RTK授时结果如图6所示。与SE22不同,XIA6设置了接收机内部时延自校准。所以,尽管2台接收机型号完全一样,但是B1C/B2a信号双频无电离层组合对应的硬件时延差异可达27ns。零基线RTK授时12天结果峰峰值在0.2ns以内,动态、静态和固定站坐标三种模式的标准差分别为0.023ns、0.021ns和0.020ns。虽然整体比较平稳,不过从图6的授时结果中可以明显看出周期性变化,尤其是第115天之后。这种现象可能是因为2台接收机的硬件延迟对温度变化的响应不同造成的。
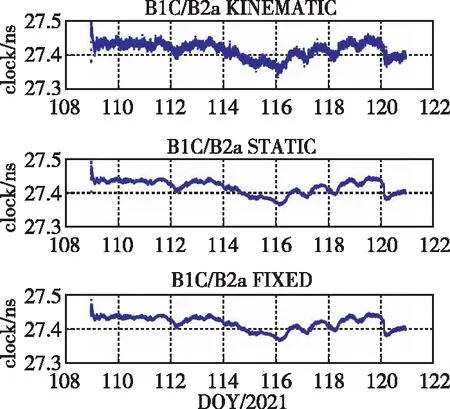
图6 零基线双频RTK授时结果Fig.6 Zero-baseline dual-frequency RTK timing results
3.3.3 闭合差
试验期间,SEPT、SE22和XIA6这3台接收机构成同步观测环,钟差闭合差理论值为0。通过同步环钟差闭合差可以检验RTK授时基线解算质量。利用SE22和XIA6短基线RTK授时结果推算得到SE22相对于XIA6的钟差,与零基线直接解算得到的SE22相对于XIA6的钟差做差,即可得到本试验的同步环钟差闭合差,如图7所示。

图7 双频RTK授时同步环钟差闭合差Fig.7 Clock closure of simultaneous observation loop for dual-frequency RTK timing
从图7可以看出,三种模式RTK授时的同步环钟差闭合差均在0附近波动,动态模式在±0.1ns以内,静态和固定站坐标模式在±0.05ns以内。三种模式同步环钟差闭合差的标准差分别为0.004ns、0.001ns和0.001ns。第114天三种模式的授时结果均存在一小段异常,动态模式的异常现象更为明显。分析RTK授时残差文件和观测值文件可知,第114天的10点02分30秒~11点11分30秒期间,XIA6接收机C43号卫星仅有B1C观测值,没有B2a观测值,无法形成双频消电离层组合。由此造成该时段RTK授时处理时,基线XIA6-SEPT比基线SE22-SEPT少1颗参与解算的导航卫星,进而在同步环钟差闭合差中形成较大的差异。尽管在第114天等个别时段存在较小的异常值,整体来看3条基线RTK授时解算一致性仍然较好。
3.3.4 稳定度
图8和图9所示分别为SE22短基线和零基线RTK授时结果的频率稳定度,以修正Allan偏差(Modified Allan Deviation, MDEV)表示。XIA6短基线授时结果频率稳定度曲线与SE22类似,限于篇幅未单独列出。短期频率稳定度固定站坐标模式最优,动态模式最差。平均时间1000s以上时,固定站坐标模式和静态模式的频率稳定度几乎一致。短基线授时三种模式的万秒稳均进入10-15量级,零基线授时三种模式的万秒稳均进入10-16量级。平均时间比较长时,缓慢变化的系统误差对频率稳定度的影响较为显著。图8中,短基线授时超过100000s时,动态授时的频率稳定度更优。原因可能是动态授时模式解算的未知参数较多,能够吸收部分缓慢变化的系统误差。

图8 SE22短基线双频RTK授时频率稳定度Fig.8 Frequency stability of short-baseline dual-frequency RTK timing for SE22
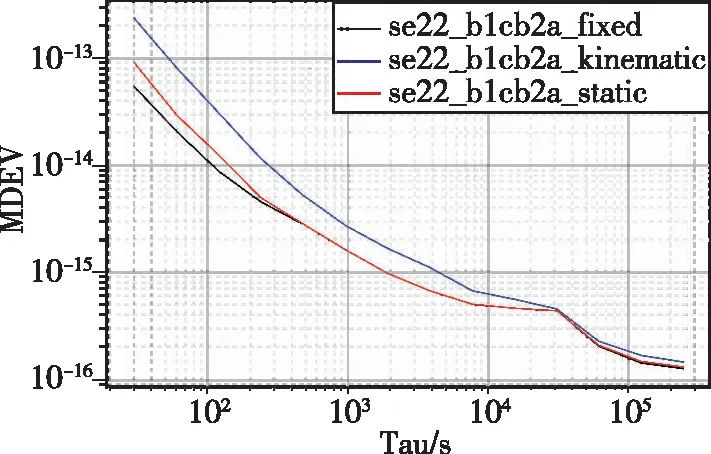
图9 SE22零基线双频RTK授时频率稳定度Fig.9 Frequency stability of zero-baseline dual-frequency RTK timing for SE22
图10所示为零基线授时结果的时间稳定度。平均时间为10000s时,三种模式的时间偏差均优于10ps。
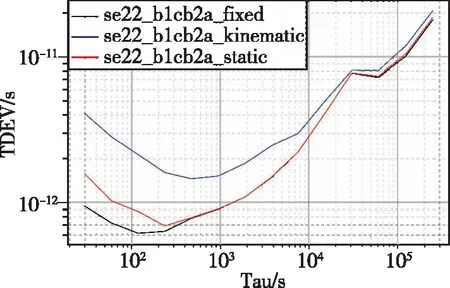
图10 SE22零基线双频RTK授时时间稳定度Fig.10 Time stability of zero-baseline dual-frequency RTK timing for SE22
4 结论
针对北斗/GNSS RTK授时覆盖范围较小的问题,提出了一种可以多区域覆盖的标准时间RTK授时服务系统。依托现有时间频率和卫星导航资源搭建了原型系统,并基于北斗三号新体制信号开展了试验验证。试验结果表明:
1)基于光纤双向时间频率传递链路可以实现对时间基准站原子钟的精准实时驾驭,精度优于0.15ns。
2)动态、静态和固定站坐标三种模式双频RTK授时结果一致性较好。动态模式噪声相对较大,固定站坐标模式收敛时间最短。
3)短基线授时精度优于0.2ns,万秒稳可进入10-15量级;零基线授时精度可达0.02ns,万秒稳可进入10-16量级。
标准时间多区域RTK授时服务系统具备技术可行性,能够实现优于1ns的授时精度,可为多区域的短距离高精度动态和静态时间用户提供技术参考。
猜你喜欢
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
导航定位学报(2018年3期)2018-09-03 00:56:16
舰船电子对抗(2016年5期)2016-12-13 08:41:14
载人航天(2016年4期)2016-12-01 06:56:24
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
水利科技与经济(2016年9期)2016-04-22 01:07:30