Multisim13仿真软件在触发器中的应用分析
2021-09-08 01:01:00张学文司佑全
湖北师范大学学报(自然科学版) 2021年3期
张学文,司佑全
( 湖北师范大学 物理与电子科学学院,湖北 黄石 435002)
0 引言

文献[1]从理论上对基本RS触发器和同步RS触发器的“不确定状态”进行了分析与实验验证,文献[2~4]依据与非门的逻辑关系并考虑门的延迟时间,分析了基本RS触发器“不确定状态”,文献[5]给出了具有置0、置1功能及“不确定状态”的同步RS触发器的Multisim仿真方法。
上述文献[1]~[6]对基本RS触发器和同步RS触发器中的一种或者两种的“不确定状态”进行了分析,本文在对这两种电路进行分析的基础上,还对主从RS触发器、主从JK触发器进行了分析,并利用Multisim13仿真软件中的字信号发生器输入信号,四踪示波器同时观察输入和输出波形,找到“不确定状态”,对其产生的原因进行分析,将理论分析与仿真分析相结合,为电路设计提供参考。此工作解决了触发器的工作波形无法用实验仪器进行分析验证的问题,同时对四种电路进行仿真分析,进一步完善了从基本RS触发器→同步RS触发器→主从RS触发器→主从JK触发器的电路改进过程。其结果表明:只有触发器特性方程没有约束条件时,才不会出现“不确定状态”,由此从本质上解释了“不确定状态”特性。
1 RS触发器的不确定状态
将两个与非门交叉连接构成图1所示的基本RS触发器。其逻辑功能如表1所示[1]。

表1 与非门构成RS触发器的功能表
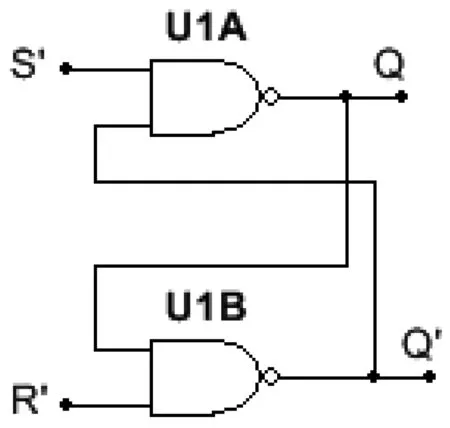
图1 与非门构成的RS触发器

对于“不确定状态”,学生理解起来比较困难,实验也没法观察到。利用Multisim13仿真软件在四踪示波器上可以很清晰地观察到非定义状态的状态变化。同时也较好地解释了为什么基本RS触发器的输入信号需要遵守SR=0的条件。
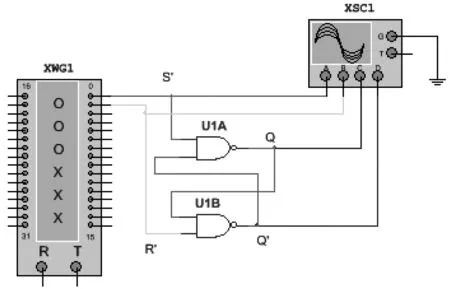
图2 基本RS触发器仿真电路
实际电路中门电路的延迟时间不可控,而在Multisim13中可以改变单个门电路的延迟时间,当U1A、U1B延迟时间不同,而且是确定的, RS触发器的输出状态就可以确定。

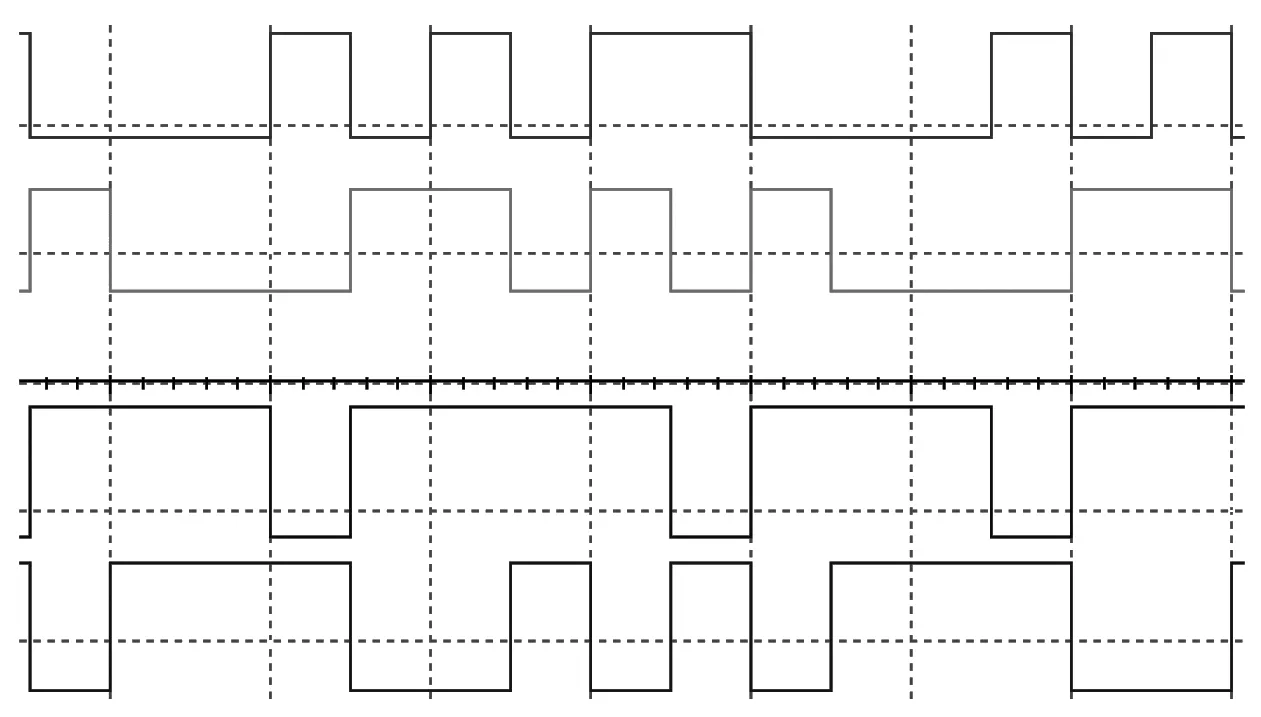
图4 示波器观察基本RS触发器输出情况(U1A延迟时间长)

图5 示波器观察基本RS触发器输出情况(U1B延迟时间长)


2 同步RS触发器的“不确定状态”
RS触发器输入信号存在竞争,容易冒险;输出受输入信号直接控制,噪声可以直接改变输出,RS触发器无法区分输入是信号还是噪声,无法处理干扰。所以需要对两个输入信号进行预处理。
在电平触发的触发器电路中,除了置1、置0输入端外,增加了一个触发信号输入端CLK.只有CLK有效,触发器才能置1、置0[3]。在时钟CLK=1期间接收S、R输入信号并改变状态, 在CLK的其他期间状态不变。如图6所示。
四踪示波器A、B、C、D分别接CLK、S、R、Q,从上至下,依次观察到的波形如图7所示。
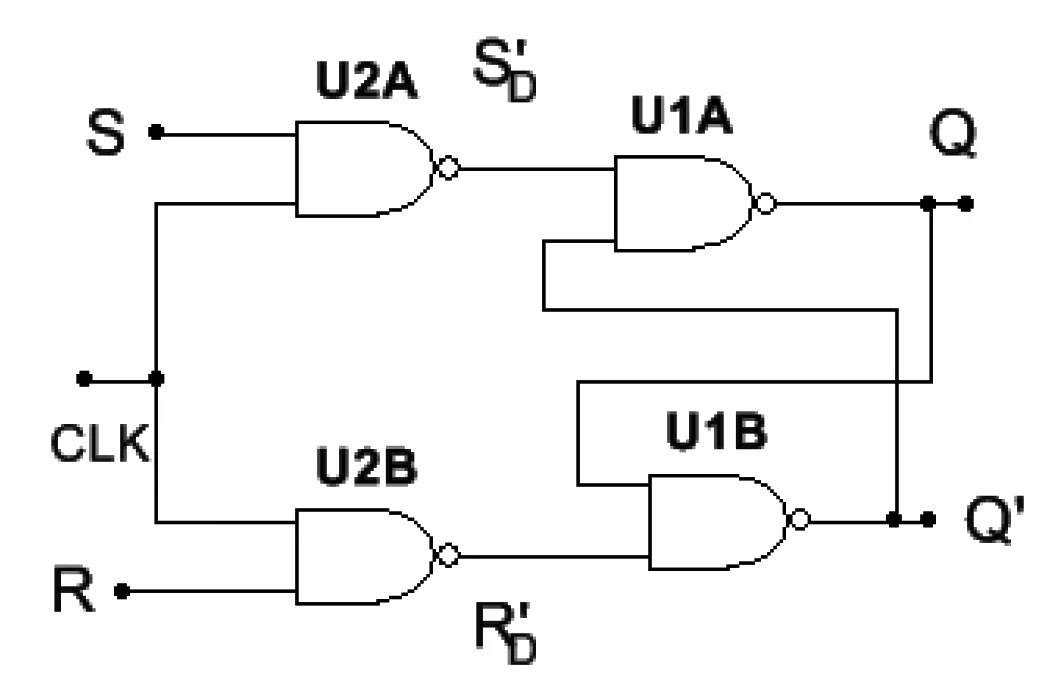
图6 同步RS触发器电路
字信号发生器设置为00→01→02→03→00→03→01→02→00之间循环,其输出端接入同步RS触发器的输入端S、R,CLK,接时钟脉冲,四踪示波器A、B、C、D分别接CLK、S、R、Q,从上至下,依次观察到的波形如图7所示。
从图7中可以看到,情形1:S=R=1,CLK从高电平变为低电平;情形2:CLK为高电平,S、R同时由1变为0.这两个时刻会出现Q不断地在0,1之间变化;情形1:对应图7中看到的左边和右边紫色的区域;情形2:对应中间的一块紫色区域。同步RS触发器可以利用CLK进行选通控制,抗干扰能力有所提升,但触发方式仍然是电平触发,存在空翻现象[5]。
3 主从RS触发器的“不确定状态”
字信号发生器设置为00→01→02→03→00→03→01→02→00之间循环,其输出端接入同步RS触发器的输入端S、R,CLK接时钟脉冲,四踪示波器A、B、C、D分别接CLK、S、R、Q,从上至下,依次观察到的波形如图8、图9所示。

图8 主从RS触发器电路
从图9中可以看到当S=R=1,CLK从高电平变为低电平的时刻开始一直到下一个下降沿脉冲到来(一个CLK的变化周期),Q不断地在0,1之间变化,图7中看到的一块紫色区域,就是主从RS触发器的“不确定状态”。主从RS触发器是脉冲触发。
4 主从JK触发器
字信号发生器设置为00→01→02→03→00→03→01→02→00之间循环,其输出端接入主从JK触发器的输入端J、K,CLK接时钟脉冲,四踪示波器A、B、C、D分别接CLK、J、K、Q,从上至下,依次观察到的波形如图10、图11所示。
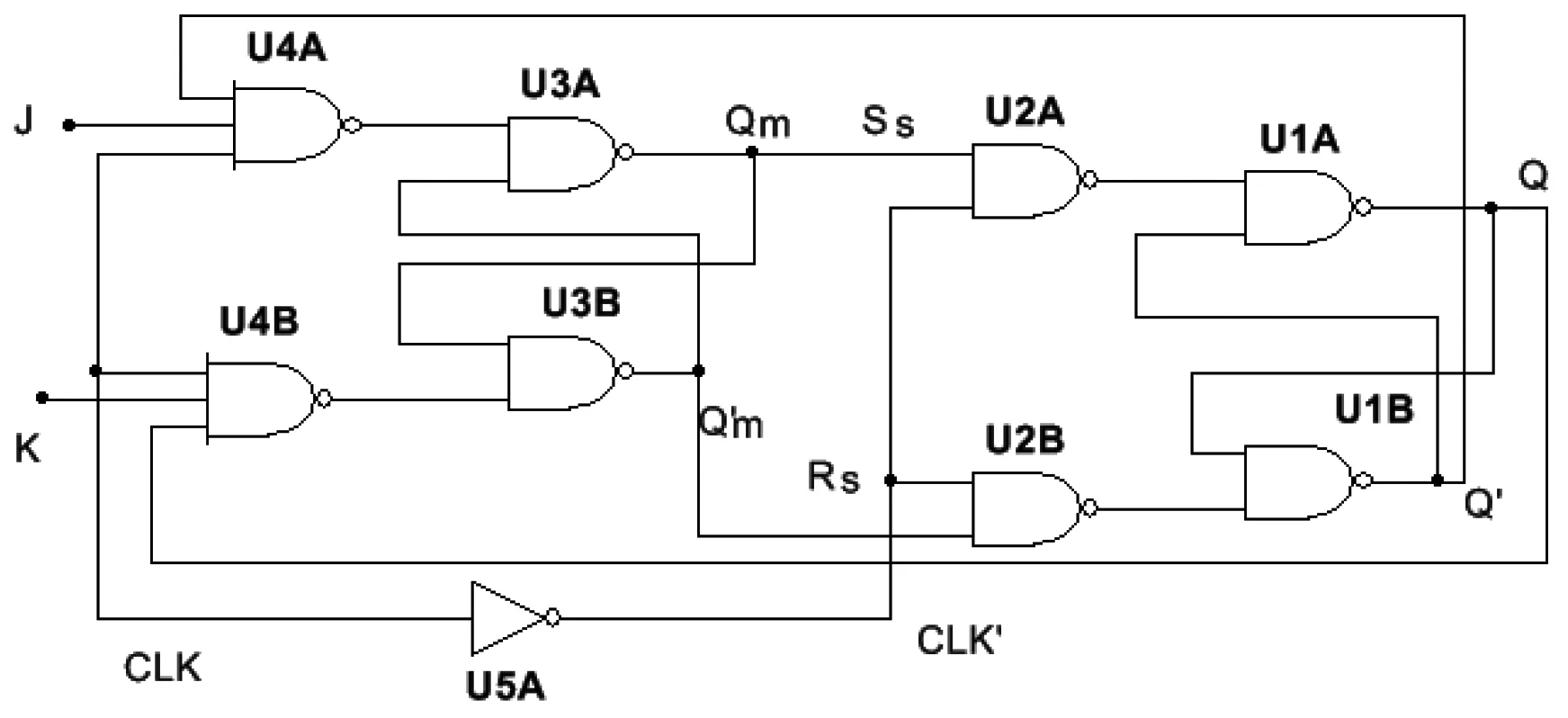
图10 主从JK触发器电路
5 总结
通过Multisim13仿真软件中的四踪示波器显示输入信号及状态输出信号的波形,对时序波形进行分析,观察基本RS触发器、同步RS触发器、主从RS触发器中 “不确定状态”发生的时间段,得到:
2)对同步RS触发器,当CLK为高电平S、R同时从1变为0,或者S=R=1,CLK从高电平变为低电平,都会出现“不确定状态”。
3)对主从RS触发器,当S=R=1,CLK从高电平变为低电平的时刻开始一直到下一个下降沿脉冲到来(一个CLK的变化周期),输出端出现“不确定状态”。
触发器特性方程如果有约束条件,当输入信号不满足约束条件时,输出端可能会出现“不确定状态”。只有触发器特性方程没有约束条件时,才不会出现“不确定状态”。
同步RS触发器存在不确定状态和空翻,主从RS触发器克服了空翻,JK触发器解决了RS触发器存在不确定状态的问题。通过比较分析,电路逐步改进过程,弄清不同电路结构触发器的动作特点和规律,特别是出现“不确定状态”的条件, 对理解和分析其它触发器及整个时序电路都有重要的借鉴作用,同时对特殊时序电路设计出现同类问题时的解决具有一定的参考作用。
猜你喜欢
煤气与热力(2021年3期)2021-06-09 06:16:22
湖南邮电职业技术学院学报(2020年3期)2020-10-13 04:40:50
交通运输系统工程与信息(2020年1期)2020-02-28 02:56:28
制造技术与机床(2017年6期)2018-01-19 02:41:22
电子世界(2017年22期)2017-12-02 03:03:45
网络安全和信息化(2017年4期)2017-03-08 19:09:03
中国塑料(2016年8期)2016-06-27 06:35:02
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:55