
基于灰度共生矩阵的建筑工地扬尘识别方法
2021-09-08 02:31李志飞杨泽尚
西安邮电大学学报 2021年3期
李志飞,赵 平,杨泽尚
(1.西安建筑科技大学 土木工程学院,陕西 西安 710055;2.西安建筑科技大学 国家级土木工程虚拟仿真实验教学中心,陕西 西安,710055)
随着城市化进程加快,城市建设工程施工扬尘污染日益严重,已成为影响城市空气质量的重要因素之一[1]。研究表明,PM10中扬尘排放占比已达到80%左右[2],会对人体健康产生较大危害[3]。因此,扬尘控制成为了大气环境污染防治的研究重点之一。
目前,混合光学遥感方法可用于PM10和PM2.5排放因子的量化分析[4],时序遥感可便捷地监测矿区的扬尘风积物[5],中高分辨率的遥感数据可准确监测场地的污染源分布[6]。总悬浮颗粒物(Total Suspended Particulate, TSP)监测仪可监测到建筑工程土方施工阶段的扬尘质量浓度分布规律[7]。基于STM32微控制器的扬尘监测设备,利用光散射原理可实时监测施工场地的扬尘质量浓度情况[8]。采用光全散射法可实时监测大范围开放空间的扬尘颗粒物浓度[9]。基于无人机的施工扬尘污染源自动监测系统可较为准确地监测施工现场的扬尘污染源[10]。基于残差网络的扬尘图像识别为建筑施工扬尘监测提供了一种有效方案[11]。但是,上述方法都是基于分布在施工场地围挡四周的传统TSP传感器定位监测,虽然读数精确,但数据更新较慢,不利于工程管理方监测扬尘污染,经常导致污染监测滞后,并且对于降尘污染无法检测,容易造成二次污染。因此,拟设计一种基于灰度共生矩阵的建筑工地扬尘识别方法。根据扬尘污染图像的特点,利用图像处理技术识别扬尘,以期监测施工现场扬尘污染情况。
1 图像预处理
1.1 二值化处理

u=w0u0+w1u1
前景和背景图像的方差
S2=w0(u0-u)(u0-u)+w1(u1-u)×(u1-u)=
w0w1(u0-u1)(u0-u1)
(1)
1.2 图像特征提取
使用大律法对图像处理后,背景图像与需监测图像已有了较高的区分度。考虑到扬尘污染图像的复杂性以及扬尘颗粒物微小、密集、分散的特点,选用灰度共生矩阵(Gray-level Co-occurrence Matrix,GLCM)方法[12-13]进行特征提取。该方法使存在扬尘污染图像的样本数据更具有多样性,使得系统对污染图像的识别更加精准有效。
构建灰度共生矩阵需要确定方向θ、灰度级N、滑动窗口及步长d等4个构造因子的取值。将提取出的监测图像分别切分成16×16像素尺寸的小窗口,为每个小窗口构建灰度共生矩阵,其方向为0°,步长为3,灰度级为16[14],然后计算能量、熵和逆差矩等3个特征值,作为3维特征向量。
能量值反映了图像的灰度值分布是否均匀。当视频图像无污染时,能量值在数帧中均会保持一个比较稳定的数值,当检测存在污染的图像时,能量值便会变大,能量曲线出现明显波动。扬尘识别方法将视频图像中扬尘污染的图形区域与无污染的图形区域进行区分,以便于进一步识别。能量值计算表达式为
(2)
式中:H(i)表示灰度共生矩阵的直方图特征值;L表示所有灰度值中的最大值。
熵值反映不同灰度值在灰度共生矩阵中的信息量。熵值越大表示灰度共生矩阵中灰度值越多,熵值越小灰度值越少。熵值的计算表达式为
(3)
逆差矩表示视频图像中较小区域灰度值的局部稳定性。当图像经过特征值提取并获得灰度共生矩阵后,其中不同类型、不同程度的污染图像会组成灰度值大致相同的小图块,而逆差矩则反映了这些小图块与整体图像的纹理变化程度以及差异。在现场,逆差矩可以用于识别图像有无固体、降尘或料堆的污染,其计算表达式为
(4)
式中:d和θ分别代表不同灰度值相对的距离和相对的角度;i和j则代表相邻的两个不同灰度值。
2 图像识别分类
朴素贝叶斯(Naive Bayes Classifier,NBC)在图像的识别分类领域应用较为广泛,其分类的结果也较其他分类器更加精确,故选取朴素贝叶斯分类器对图像特征值识别分类。在图像污染监测过程中,每帧图像都是由一个3维特征向量F=(f1,f2,f3)表述,划分为存在施工扬尘污染和不存在施工扬尘污染两种类别,其集合为C={c1,c2}。利用一帧画面的每个特征fi计算一帧画面F为某个类别cj的概率,计算表达式为
(5)
其中,P(f1,f2,f3)为常量。
对于特征向量F,其后验概率P(cj/F)的值越大,则说明F隶属于cj的可能性越高。F所属类别的计算表达式为
(6)
分别计算出P(cj)与P(fi/cj)后,返回后验概率最大的类别,即可得到F的类别。
3 实例验证及结果分析
3.1 测试区域选取
以某在建工程项目为例,南大门入口处有较多工程及运输车辆通过,扬尘污染较为严重,排放量大,因而把此区域选为测试区域,进行监测管理。监测点位置如图1所示。

图1 监测点位置
3.2 图像特征仿真分析
分别对路面降尘污染、扬尘污染和无污染等3种污染图像进行灰度矩阵特征量提取,结果如表1所示。能量特征、熵特征和逆差矩特征分别用向量F=(f1,f2,f3)表示。

表1 特征值提取结果
由表1可知,单帧图片的无污染图像的特征值和有污染图像的特征值存在明显的差异。因此,选取能量、熵和逆差矩作为污染与干净图像的分类特征较为准确合理。
随机选取某天监测视频中的70帧污染图像和70帧干净图像。干净图像与污染图像在3个特征值下的仿真结果对比如图2所示。可以看出,污染图像与干净图像在能量特征、熵特征和逆差矩特征上均存在较为显著的数值差异,分离性较好。
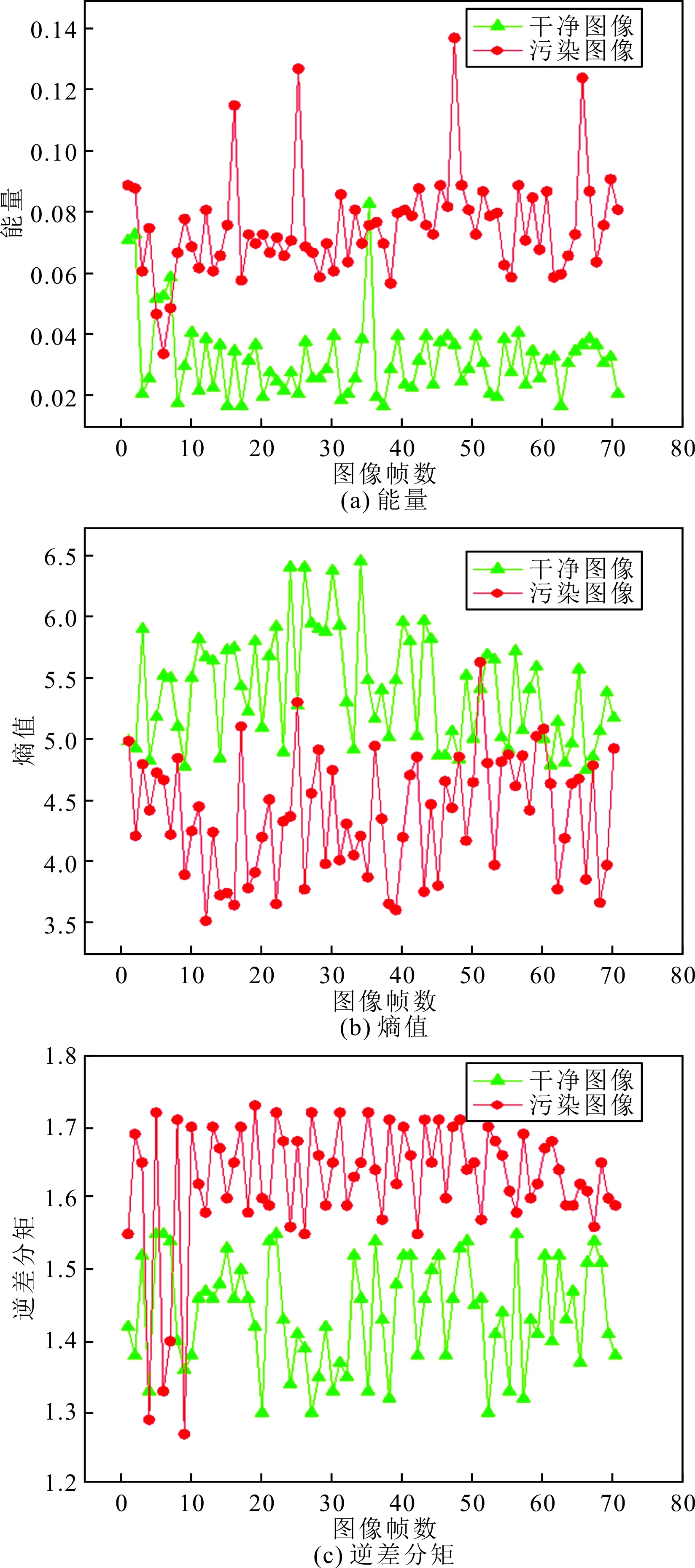
图2 特征值仿真结果对比
3.3 识别结果分析
选取有扬尘污染的图片和干净图片各700帧,并利用所提方法进行识别,结果如表2所示。
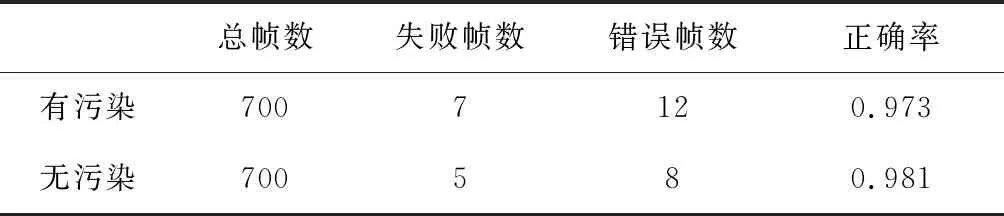
表2 分类识别结果
由表2可以看出,污染图像中有7帧视频图像分类失败,12帧视频图像分类错误,分类识别的准确率为0.973。无污染图像中有5帧视频图像分类失败(提取灰度矩阵时出现错误),8帧图像分类错误,分类识别的准确率为0.981。所提方法准确率较高,而且识别监控范围更广,可有效识别路面上的可能产生次级扬尘的降尘污染。
4 结语
基于灰度共生矩阵的建筑工地扬尘识别方法,利用大律法对图像进行二值化处理,得到最佳阈值,区分背景图像与需监测图像。构建灰度共生矩阵,提取能量、熵和逆差矩等3个特征值,通过朴素贝叶斯分类器识别存在扬尘污染的图像。实例验证结果表明,该方法识别扬尘污染图像准确率较高,同时能够识别存在于路面的降尘污染,可在建筑工地中加以应用,提高施工管理方对于扬尘污染的自查自检能力。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
集装箱化(2021年1期)2021-04-12
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中国信息技术教育(2020年2期)2020-02-02
中国外汇(2019年20期)2019-11-25
新生代(2019年16期)2019-10-18
课程教育研究·新教师教学(2016年18期)2017-04-12
科技经济市场(2014年11期)2014-12-30
