
带前馈解耦的PMSM 滑模观测器控制研究
2021-08-28 09:49彭臣张振东
农业装备与车辆工程 2021年8期
彭臣,张振东
(200093 上海市 上海理工大学 机械工程学院)
0 引言
为了解决燃油汽车带来的环境污染问题,纯电动汽车在国内外得到迅速发展。电机作为电动汽车重要的驱动装置,使得汽车的动力性与电机系统的性能关系密切。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为电动汽车常用的电机之一,其在结构和性能上表现出许多优点[1]。为了提高汽车的驱动性能,有关PMSM系统的控制显得尤为重要。通常情况下,在PMSM 的矢量控制系统中使用传感器来获取位置等参数信息,但是这样不但经济性差,对硬件有较强的依赖性,而且还会降低驱动系统的可靠性,同时对其安装、运行环境也有比较严格的要求[2-3]。因此,为了解决这个问题,无位置传感器控制技术逐渐成为三相PMSM 主流控制方法,并且对转子位置和速度估算的控制算法也成为众多学者研究的对象。目前,三相PMSM 无位置传感控制技术主要可以分为2 类:一类是利用基波数学模型中与转速有关的量(如产生的感应电动势)来获取位置信息。由于在转速为零或者速度极小的情况下,信号会失真,提取困难,所以,这类方法主要用于中、高速状态下电机转子位置估计[4-7];另一类是利用电机凸极率特性注入高频信号来获取位置信息,此法能够满足零速和极低速状态下电机转子位置估计,主要算法类型有旋转和脉振两种方法[8-9]。
本文基于内置式三相PMSM 同步旋转坐标系下的数学模型,合理设计滑模观测器算法以识别电机相应参数,并引入锁相环系统来减小位置估计误差,同时在传统PI 调节器中加入前馈解耦单元,实现电流的完全解耦,提高系统动态性能,最后搭建了控制系统的MATLAB/Simulink 仿真模型,使该方法的正确性与有效性得到验证。
1 永磁同步电机数学模型
PMSM 运行过程中,各参数间耦合性强,并且是一个非线性系统,所以其数学模型具有复杂度高、变量多的特点[4]。为了方便PMSM 控制系统模型的设计和相关参数的计算,通常在同步旋转 坐标系下建立其电机的数学模型,因此,其定子电流方程可表示为[4,6]
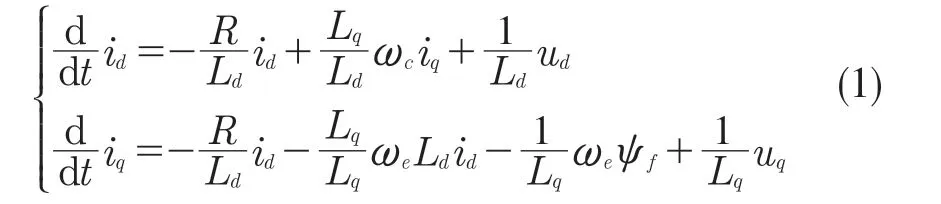
式中:uq,ud——定子电压d-q 轴分量;id,iq——定子电流d-q 分量;R——定子电阻;Ld,Lq——d-q 电感;ωc——电角速度;ψf——永磁体磁链。
2 滑模观测器控制系统模型
滑模控制系统结构能根据系统运行状况有目的地作动态变化,而且能够在不受参数变化及外部扰动影响的情况下,根据系统实际需求设计滑模轨迹,所以滑模观测器法具有快速响应、稳定性高、结构简单等优点[6],在PMSM 上使用具有良好效果。在PMSM 控制系统中,SMO 系统是通过检测电机运行的反电动势来估算转子位置和速度,所以在构建SMO 系统时,以获取电动势为目标进行设计。然而,传统滑模观测器在滑模状态下存在随机的离散现象,其并不是一直都在连续状态下运行,所以在这种情况下往往会引起电机的抖振,因此为了避免抖振对系统的影响,本文使用了锁相环(Phase—locked Loop,PLL)系统进行转子位置估计。
2.1 滑模观测器设计
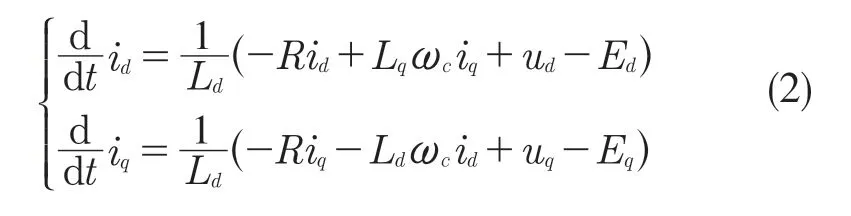
根据式(1),令d-q 坐标系下的感应电动势Ed=0,Eq=ωeψf,重写定子电流方程
为了计算出式(2)中的感应电动式的值,令定子d 轴电流观测值为,q 轴的为。可设计滑模观测器如下所示:
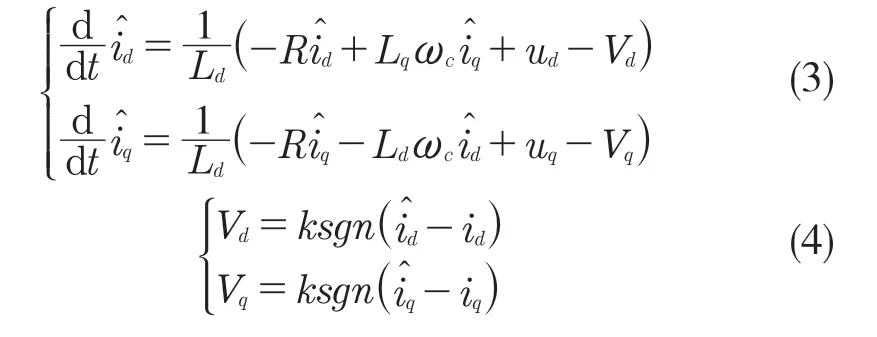
式中:k——滑模增益。
从式(4)可以看出,电动势中包含不连续高频信号,为了消除高频噪声的影响,通常使用低通滤波器将含有高频信号的不连续切换控制量转化为等价控制量。
另外,通常选取符号函数sgn(s)为滑模控制函数,该函数是一个不连续的分段函数,控制函数的增益在点0 处会有正负号的突变,所以当状态变量 s=0 时,系统会发生抖振现象。本文引入饱和函数sat(s)加以替换,以降低系统不连续性引起的抖振对系统的影响,提高滑模观测器的控制性能,
2.2 基于PLL 的转子位置估计
为了使系统的动态性能更佳,使转子位置和速度估计值更接近实际值,本文在滑模控制系统中增加PLL 系统来跟踪和估算转子位置。PLL 是一种负反馈控制系统,能够仿制信号的相位信息,所以,三相对称电源相位信号和频率信号能够被PLL 系统同步,进而实现对转子位置信息的跟踪和估算[10-11]。根据绕组的对称性,将三相电机定子绕组的感应电动势设为
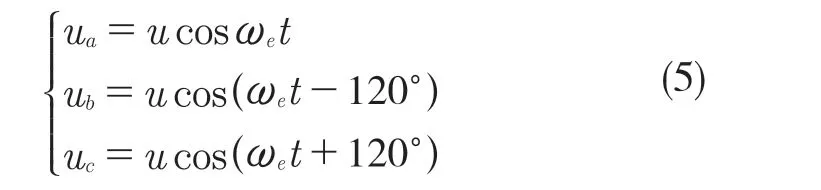
再令θ=ωet,其中ωe=2πf=πpnn/30,pn为电机极对数,n 为电机转速。
根据Park 变换原理[12],能够得到Park 变换的变换矩阵为
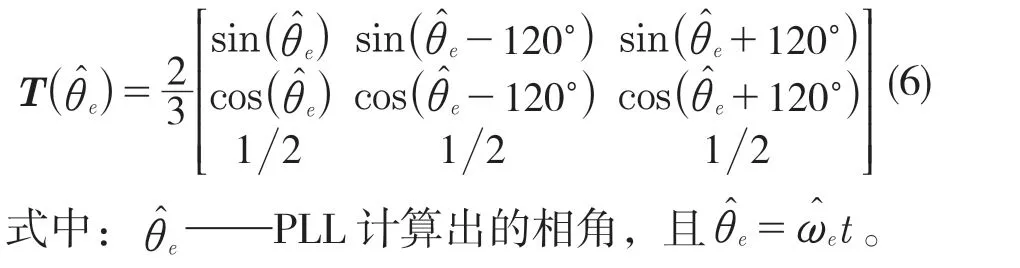

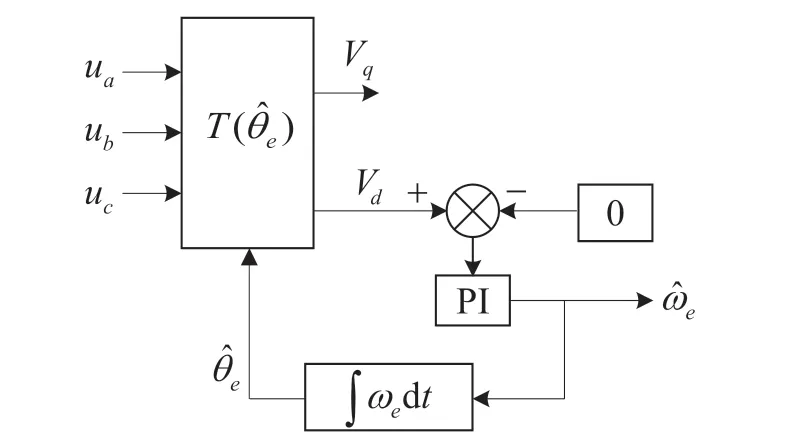
图1 锁相环模型框图Fig.1 PLL model block diagram
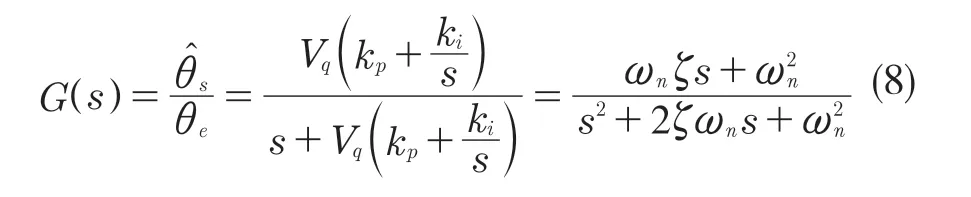
由图2 可以得到系统的闭环传递函数为
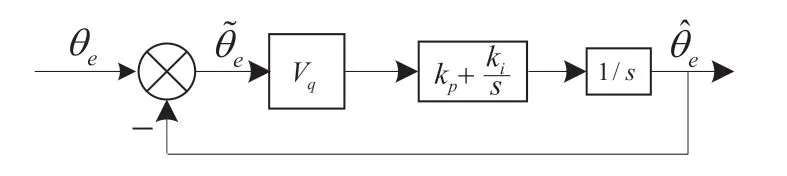
图2 锁相环传递函数框图Fig.2 PLL transfer function block diagram
2.3 前馈解耦单元设计
由式(1)知,定子电流公式都包含 id,iq项,所以,q 轴和d 轴方向电动势同时受2 个方向电流影响,这种影响造成参数间产生耦合现象[13-14],促使PI 调节器性能下降,进而影响调速系统的补偿调节能力。所以,解决电流的耦合问题能改善PI 调速器在控制系统中的性能。为了解决电流id、iq的耦合问题,可将式(1)变为
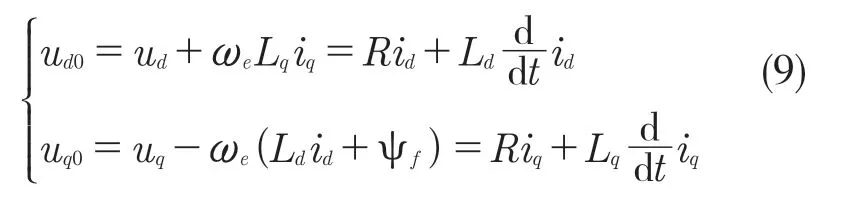
式中:ud0,uq0——电流解耦后的d 轴和q 轴电压。
在常规的PI 调节器中加入前馈解耦控制单元,可得到d-q 轴的电压为
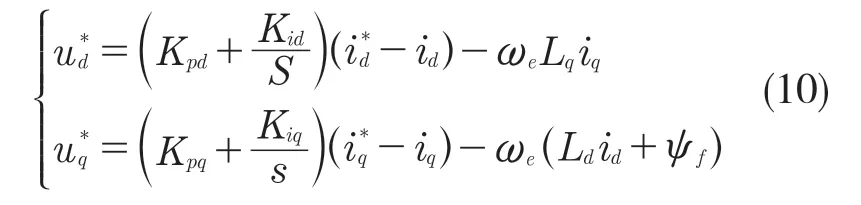
式中:Kpd,Kpq——比例增益;Kid,Kiq——积分增益。
3 MATLAB 仿真及结果分析
根据上述滑模观测器及前馈解耦单元的设计,得到整个控制系统框图如图3 所示。其中,为了减小计算量,使控制方法相对更简单,系统所采用的控制方式为id=0,该方法还能扩大系统调速范围[15],使用比较广泛。
为了验证系统的正确性和有效性,结合图3所示控制系统框图及以上关键组件搭建图4 系统仿真模型。仿真模型主要由PMSM 模块、逆变器模块、SMO 模块、PI 模块、坐标变换及SVPWM模块等构成。仿真过程中,PMSM 采用的基本参数为:极对数pn=3,定子电阻R=0.011 Ω,电子电感Ld=1.6 mH,L1=1 mH,磁链ψf=0.077 Wb,转动惯量J=0.000 8 kg·m2,阻尼系数B=0。设定参考转速为Nref=1 000 r/min,仿真初始时刻负载转矩为0,在0.5 s 给电机增加负载转矩为1 N·m。仿真结果如图5、图6 所示。

图3 PMSM 滑模观测器控制系统框图Fig.3 Block diagram of MSO control of PMSM
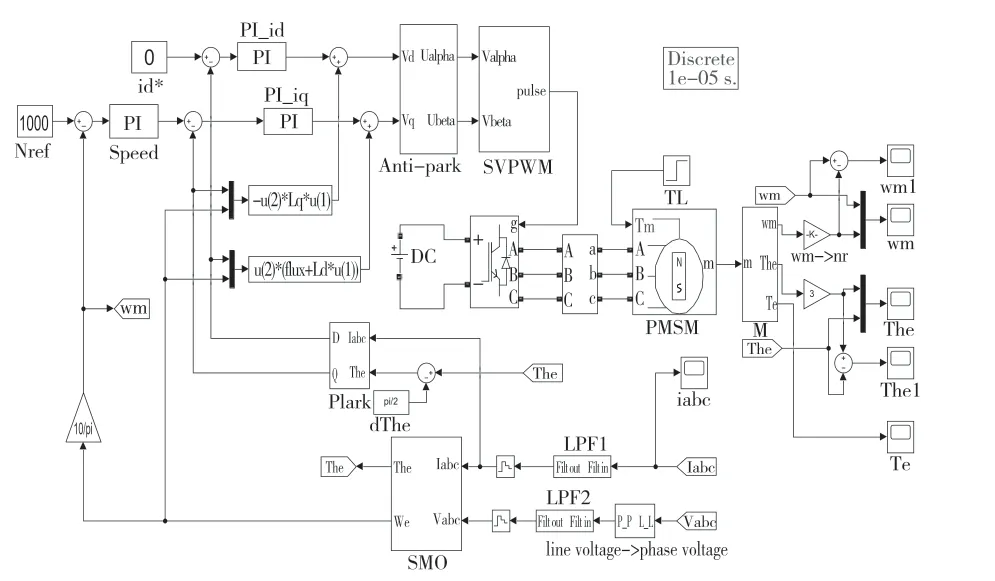
图4 仿真结构图Fig.4 Simulation structure diagram
从图5 可以看出电机转速从零上升到参考速度1 000 r/min 并达到稳定状态的过程中,转速的估计值与实际值动态变化过程相似,估计值在实际值微小误差范围内变化。从图6 进一步可以看出,在电机转速趋于稳定的参考值前,电机转速估计误差变化幅度大并达到最大值,当电机转速趋于稳定后,转速估计误差逐渐减小,在0 误差线周波作微小波动。由变化曲线可以看出,在初始过渡过程阶段电机转速与给定值之间有一定误差,但其动态响应速度较快,并且在0.5 s 时,给电机加负载转矩为1 N·m,电机转速经过短时调整能恢复到给定的参考转速值,说明系统的动态性能和抗干扰能力较好。
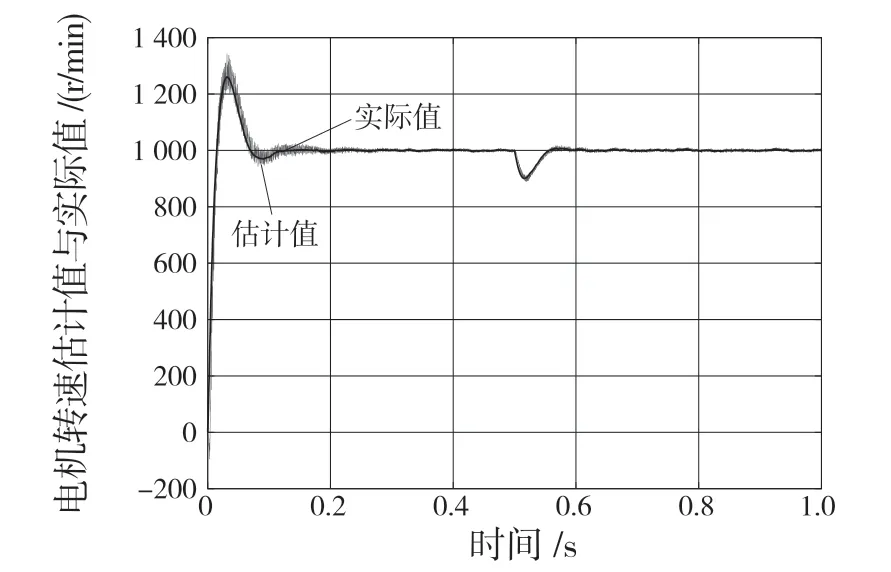
图5 转速实际值与估计值Fig.5 Actual speed and estimated speed
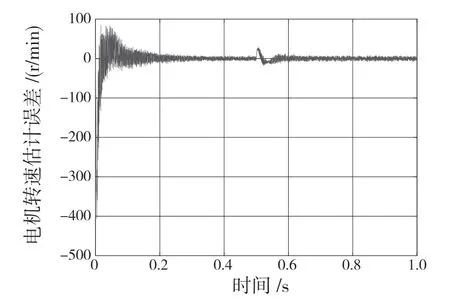
图6 转速估计误差Fig.6 Speed estimation error
根据仿真结果图7 曲线可以看出,估算值变化过程与实际值基本重合,而且能够保持良好的一致性,说明位置检测系统对位置的估算准确。由图8 可知在电机转速上升阶段,电机转子位置估计误差较大,误差最大值在0.4 rad 左右,但随着转速上升,转子位置估计误差能在较短时间内逐渐减小并趋于稳定。同样,由于在0.5 s 给电机加负载转矩为1 N·m,可以看出,此时转子位置估计误差有明显的突变,但是又能够快速减小并恢复到稳定状态。由此可见该系统具有较好的动态性和抗干扰能力,对转子位置估算精度高,可以取得理想的控制效果。
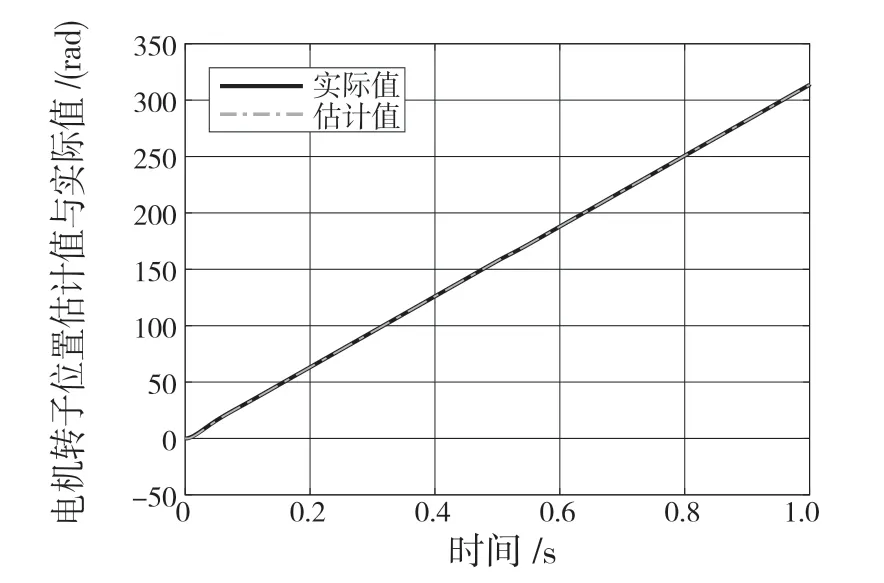
图7 转子位置估计值与实际值Fig.7 Estimated and actual rotor position
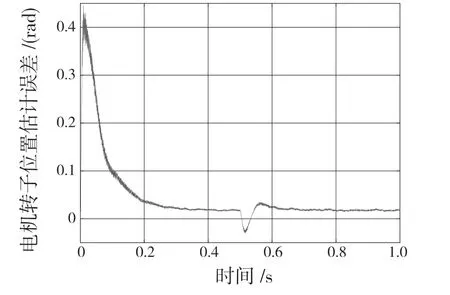
图8 转子位置估计误差Fig.8 Rotor position estimation error
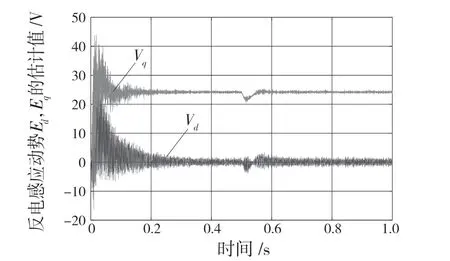
图9 感应电动势Vd 和VqFig.9 I nduced EMF Vd and Vq
由图10 可以看出,在运行过程中,电机的三相电流变化平稳,说明解耦单元能够实现电流完全解耦,受到负载扰动也能维持在新的稳定状态,整个调速系统动态性能强、鲁棒性好。
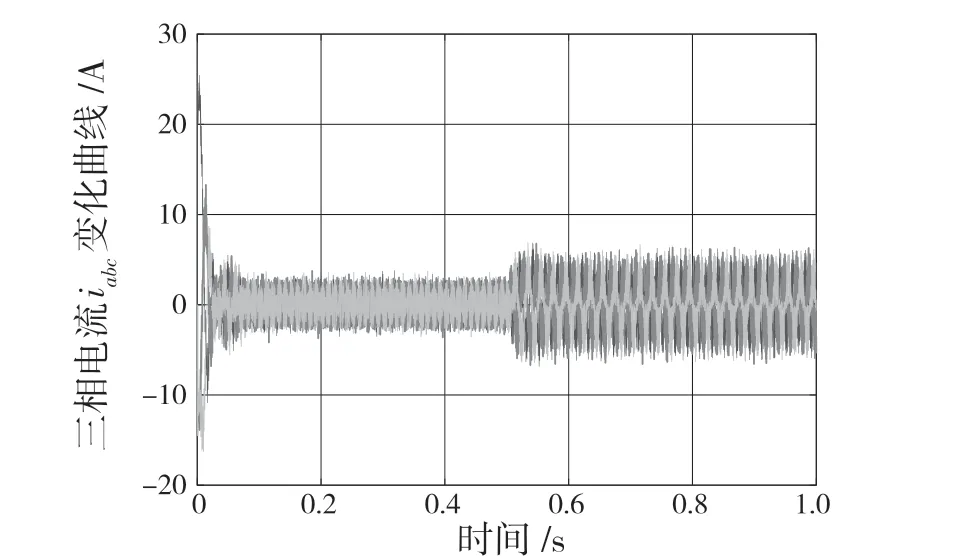
图10 三相电流iabcFig.10 Three phase current iabc
4 结论
本文采用同步旋转d-q 坐标系下的电机数学模型,将滑模观测器算法与电压前馈解耦控制单元相结合提出了一种无位置传感器估算PMSM 转速与转子位置的控制方法。其中,PI 电流控制器中的前馈解耦单元在整定PI 调节器参数的同时,也能够解决d-q 轴电流耦合问题,使系统的动态性能得到优化;SMO 系统与锁相环系统相结合,能够极大地提高反应转子位置信号的监测与估算能力。仿真结果表明,所提出的控制结构系统对转子速度与位置信估算准确,并且能够适应突然加载带来的扰动,说明其动态性能好、鲁棒性强,能够满足实际电机控制需求。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
物理之友(2022年1期)2022-04-19
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
中学物理·高中(2016年12期)2017-04-22
电子制作(2017年24期)2017-02-02
新高考·高一物理(2015年6期)2015-09-28
