
Review on bio-inspired flight systems and bionic aerodynamics
2021-07-23 08:46JikunHANZheHUIFngoTIANGngCHEN
CHINESE JOURNAL OF AERONAUTICS 2021年7期
Jikun HAN, Zhe HUI, Fngo TIAN, Gng CHEN,c,*
a School of Aerospace Engineering, Xi’an Jiaotong University, Xi’an 710049, China
b School of Engineering and Information Technology, University of New South Wales Canberra, ACT 2600, Australia
c The Key Laboratory of Aerodynamics Noise Control, Mianyang 621000, China
KEYWORDS Bio-inspired flight systems;Biomimetic air vehicle;Bionic aerodynamics;Micro air vehicle
Abstract Humans’ initial desire for flight stems from the imitation of flying creatures in nature.The excellent flight performance of flying animals will inevitably become a source of inspiration for researchers.Bio-inspired flight systems have become one of the most exciting disruptive aviation technologies.This review is focused on the recent progresses in bio-inspired flight systems and bionic aerodynamics.First, the development path of Biomimetic Air Vehicles(BAVs)for bio-inspired flight systems and the latest mimetic progress are summarized.The advances of the flight principles of several natural creatures are then introduced, from the perspective of bionic aerodynamics.Finally, several new challenges of bionic aerodynamics are proposed for the autonomy and intelligent development trend of the bio-inspired smart aircraft. This review will provide an important insight in designing new biomimetic air vehicles.
1. Introduction
Humans’initial desire for flight stems from the imitation of flying creatures (e.g. insects, bats, and birds)in nature. Research on the aircraft that simulates flying biological organisms has been reported for centuries. Historically, perhaps the most famous early ideas of using a bionics concept to design the biomimetic aircraft can be traced back to the dream of Leonardo da Vinci in 1485.1It is called a dream because Leonardo ignores birds gliding flight to draw some sketches of wings by adopting a less literal bionic approach instead of designing a flying aircraft.2Subsequently, this bionic aircraft was replaced by a glider in the aviation field. It was not until the 20th century that the first bio-inspired aircraft began to be built. The study of bionic aircraft is executed in the development of Micro Air Vehicle (MAV). In the 1990 s, the Defense Advanced Research Project Agency (DARPA) has proposed the concept of MAV for the first time.3Due to its strong tactical practicality, the MAV has a unique application prospect in both military4and civilian5fields,and has gradually become a frontier and hot issue in the international aviation field.Subsequently, various countries have developed various types of MAV to meet the requirements of different missions.The current MAVs are mainly classified into three categories: Fixedwing Micro Air Vehicle (FMAV), Rotary-wing Micro Air Vehicle (RMAV) and flapping-wing micro air vehicle (also called biomimetic, BMAV) according to their flight principle and aerodynamic layout6. In fact, the flapping-wing micro air vehicle is accompanied by the use of the bionic concept.
There have been the historical origins of bio-inspired flight systems throughout the development of MAVs.From the perspective of miniaturization,we believe that the development of MAVs can be roughly divided into three stages. These three stages also correspond to the changes in the key technical indicators and design concepts of MAVs. The first stage refers to the concept and technical demonstration of MAVs from 1996 to 2002. The main promoter is DARPA’s four-year MAVs program.At this stage,the subjects studied are FMAVs and RMAVs.Their technical index is that the aircraft is about 15 cm in length,about 100 g in mass and about 20 min in flight time. Representative achievements include: Black Widow7from AeroVironment, Microstar8from Lockheed Sanders,and Kolibri9from Knick Corporation.In fact,the design concepts of these FMAVs and RMAVs derived from the direct reduction of traditional large fixed-wing aircraft and helicopters in size. Because MAVs cannot carry a lot of fuel and load like a large aircraft, there are still technical bottlenecks that are difficult to break under the technical conditions at that time,which led to the research of MAVs being in a stagnation period for a long time.At this stage,the development of MAV is far from the originally expected target of DARPA, but it provides solid technical support for the future development of MAV and leads the craze of international research for MAVs.7,10After, it is found that the nature has already designed a better MAV that is the flying creature in nature with high flight efficiency,low flight noise,strong concealment,good mobility and stability. These excellent flight performances of creatures are beyond the reach of modern aircraft.Therefore, learning flight from birds and insects in nature,using the bionics principle to design a biomimetic micro air vehicle with small scale,high mobility and high flight efficiency has gradually attracted our attention.10The bio-inspired flight system has begun to appear in aviation history.The use of this bionic concept promoted the second stage of the development for MAVs.
The second stage refers to the period from 2003 to the beginning of this century, which is the transformation stage of the design concept for MAVs. At this stage, the United States has made breakthroughs in the research and development of MAVs, and a novel MAV (Nano Air Vehicle, NAV)with a size within 7.5 cm, a mass of about 10 g, and lowspeed flight and hovering capabilities has been the focus of research by DARPA.11It has been found that the flight mode of birds and insects employing flapping wings is more suitable for small-scale objects such as NAVs to fly at low Reynolds number. Therefore, at this stage, the research focus of MAVs began to change from FMAVs and RMAVs to Biomimetic Micro Air Vehicles (BMAVs). Representative flapping-wing micro air vehicle include: MicroBat7in California Institute of Technology, Entomopter in Georgia Institute of Technology,12AeroViroment’s Hummingbird prototype,11and Berkeley’s machine insect MFI.13The flapping wing can provide more lift than the fixed wing,and the mass of the flapping wing aircraft has been significantly reduced without changing the power system. But because flapping consumes extra valuable energy, its flight time is also significantly reduced compared to rotor and fixed wing. Nevertheless, the future prospects of the BMAVs are inestimable. The bionic concept at this stage has been proven to provide new design ideas for the development of MAVs.
For the flight, we need the bio-inspired flight system to bring the MAVs from laboratory to application. The third stage is from 2010 to the present,which pursues the realization of BMAVs’ flight. In 2015,14the British Army publicly displayed the ‘‘Black Hornet” miniature unmanned helicopter developed by Norwegian Prox Dynamics.The‘‘Black Hornet”is about 10 cm long, weighs 16 g (including batteries), has a battery life of 25 min, and has a maximum speed of about 18 km/h.14,15It can transmit pictures and videos from 800 m to the handheld surveillance controller. The hummingbird flapping wing MAV developed by the DAPAR has reached the required standard for equipping the army. At this stage,the research of MAVs has benefited from the rapid development of advanced materials technology,microelectronics technology and efficient energy technology, and it is developing towards miniaturization, automation and intelligence. At present,the representative applied MAVs include the Dragonfly,a robot weighing less than 3 g,developed by Delft University of Technology in the Netherlands,16and the smallest and lightest robot bee in the world, developed by Harvard University.17Various new concepts of MAVs have also been proposed especially with the breakthrough of artificial intelligence and micro-system technology, but the concept of bionics has been running through the development of MAVs.
Since the flapping-wing MAV Microbat was designed by the California Institute of Technology,the application of bionics has found a new breakthrough for MAVs.7,10The flappingwing aircraft has become the focus of research on bionic aircraft, especially bionic MAVs.18The excellent flight performance of flying animals will inevitably become a source of inspiration for researchers to design aircraft with good aerodynamic performance using the concept of bionics in the future.In recent years, with the development of materials science,electronic technology, biomimetic theory, mechanical manufacturing and other related disciplines, bio-inspired flight system has become one of the most exciting disruptive aviation technologies, which is also the current international academic research hotspot. As a complex and highly integrated intelligent bio-inspired flight system that integrates a variety of advanced technologies, the development of bio-inspired flight system involves multiple disciplines such as unsteady aerodynamics, micromechanics, microelectronics, energy power, and bionics. As of now, it still needs to solve the extremely challenging key technologies such as aerodynamics at low Reynolds numbers, the design of material structure, the management of energy, autonomous navigation and control,and precision machining.3–5,17,18
In this paper, the development path of Biomimetic Air Vehicles(BAVs)for bio-inspired flight systems and their latest mimetic progress are summarized. This paper divides the current bionic aircraft into two types of flapping and non-flapping according to their different flight modes. In these two states,different bionic technologies are designed.Then,from the perspective of bionic aerodynamic,the advances of the flight principles of several natural creatures are introduced. Finally,several new challenges of bionic aerodynamics are proposed for the autonomy and intelligent development trend of the bioinspired smart aircraft.Based on the introduction of the development of bio-inspired flight systems,this paper focuses on the research progress of bionic aerodynamics for biomimetic aircraft. Our intention is that this will provide a resource for researchers engaged in new biomimetic air vehicles, which will promote their further research interest.The rest of this paper is organized as follows: In Section 2, several common bioinspired flight systems with flapping wing are introduced,including bird-like aircraft, insect-like aircraft, and bat-like aircraft. Section 3 introduces the bio-inspired flight systems with non-flapping wing, and also introduces some new bionic aircraft currently developed. The research status of aerodynamic mechanism during biological flight is introduced in Section 4. And Section 5 gives the prospects and challenges of future bio-inspired flight systems.
2. Common bio-inspired flight systems with flapping wing
2.1. Bird-like flying vehicles
There are about 9000 species of birds in nature.19Birds show people their excellent flight capabilities and inspired people to develop similar bio-inspired flight systems.The humans’initial exploration of flying began with imitating birds. In each period of the history of human civilization, much effort has been devoted to the invention and design of bird-like aircraft or the improvement of the flapping-wing theory. Especially in the early days of bionic aircraft research, because the key technologies involved in the research of bird-like aircraft are relatively mature, the research of bio-inspired flight systems begin with bird-like flying vehicles. For example, Smartbird,a flapping-wing vehicle simulating seagull and a milestone for the development of bird-like flying vehicles, was designed by German FESTO in 201120,21(as shown in Fig.1(a)).Smartbird has a wingspan of 1.96 m,a length of 1.06 m,and a weight of 450 g.Its slewing radius is small.Employing the seagull-like streamlined flapping wings, the parallel link mechanism can control the wingtip torsional movement while driving the flapping wings.Equipped with a highly autonomous flight control system,Smartbird can fly autonomously.Its head and tail can swing,its flexibility is comparable to that of a real bird,and it can mix the false with the genuine when flying.
With the maturity of related technologies and theories, the bird-like flapping-wing aircraft are developing towards miniaturization,stabilization,autonomy and intelligence,which can be confirmed by the relevant parameters of several typical bird-like aircraft in Table 1.Since 2010,the University of California,Berkeley has executed research on some new flappingwing aircraft based on the Machine Insect MFI project, and achieved robust autonomous indoor flight of bionic flappingwing aircraft by using robust intelligent control. As shown in Fig. 1, this series of aircraft mainly includes iBird-bot (Fig. 1(b))22and H2Bird (Fig. 1(c)).23They carry the micro-control CPU, camera, gyroscope, acceleration sensor, and communication module, and have a total weight of only about 12 g and a payload of more than 2 g.24,25Moreover,the Hummingbird was designed by American AeroVironment in 2012,it is a Nano MAV, which is a milestone in the history of bionic flapping-wing aircraft, and it represents the highest level of current development of bionic flapping-wing aircraft26(Fig. 1 (d)). The research of Hummingbird is part of a funded project that is the Nano Flight Program proposed by DARPA,which cost$4 million to complete in 5 years.It has a wingspan of 16 cm,a weight of only 10 g,and flight time of 10–20 min.It can withstand crosswind interference of 2.5 m/s when soaring at a speed of 10 m/s. Employing the tailless flight mode, it can realize difficult actions such as hovering and somersaulting in the sky,and can perform reconnaissance tasks in small areas and indoors. At that time, the Hummingbird has reached the technical requirements of the armed forces. Although the Hummingbird failed to achieve the target of less than 10 cm in size, the US military spoke highly of the Hummingbird.The successful development of the Hummingbird has opened the way for the research of a new generation of bird-like aircraft. The Dove of China27was reported on September 24,2011. The bionic flapping wings are produced by using the streamlined airfoils of birds, and the traditional planar link mechanism drives bionic airfoils. The whole machine weighs 220 g, the wingspan is 60 cm, and the speed is 6–10 m/s. At that time, limited by the development level of basic industrial technologies such as domestic microelectronics technology and micro-electromechanical system technology, the bird-like flapping-wing aircraft have relatively slow development.
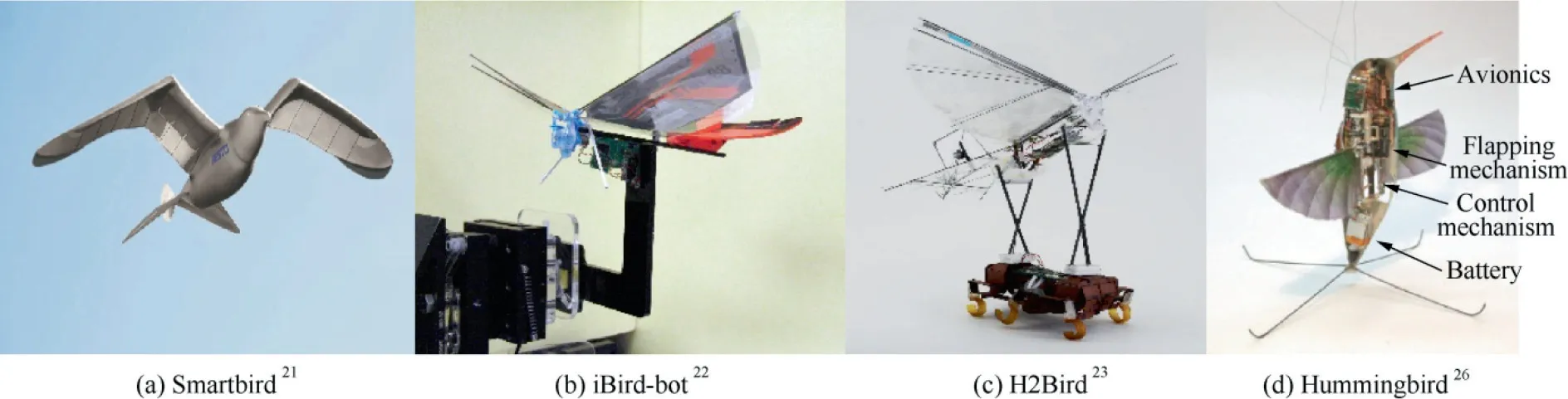
Fig. 1 Classic bird-like flying vehicles (These bird-like aircraft gain soaring power through using flapping wings).

Table 1 Relevant parameters of several typical bird-like aircraft.
The future bird-like aircraft have the following characteristics:good aerodynamic performance(can actively adapt to different environments), strong maneuverability (can pass through complicated spaces),high flight efficiency(low energy consumption for long-distance flight) and other advantages,and they can overcome the shortcomings of high cost, low energy utilization, and weak stealth capabilities of FMAVs and RMAVs. They have huge development potential and application prospects. The current bird-like aircraft mainly imitate the flight mode, that is, the flapping airfoil generates lift and thrust for flight, but the aerodynamic efficiency is still far from that of birds.In addition,the research on the sensing,driving and control of the bio-inspired flight systems and the flight mechanism of birds is still in their infancy, so further in-depth research is urgently needed to make the bird-like aircraft have the excellent flying ability like birds. The bird-like flying vehicle soars like a bird in nature. The flapping frequency is generally 10–20 Hz.28The lift is generated by the forward speed. This low flapping frequency and high wing mass ratio make the coupling relationship between aerodynamics,structure and flight mechanics. Therefore, it is an issue that cannot be ignored in designing an efficient and highperformance bird-like flapping aircraft.
2.2. Insect-like flying vehicles
In addition to the larger birds in nature, insects are also masters of flying. They can fly stably even in the face of strong winds. As some countries have successively established special research institutions and invested a lot in research funding for MAVs, the insect-like aircraft or robotic insects have become another research hotspot after bird-like aircraft. Especially with the breakthrough of micro-system technology and artificial intelligence technology, various insect-like bio-inspired flight systems such as dragonfly, bee, fly and butterfly have been developed successively. According to the form of several common insects, the insect-like flying vehicles can be roughly divided into dragonfly-like aircraft, fly-like aircraft, and butterfly-like aircraft. Therefore, we will introduce these insect-like flight systems in detail.
The Delft University of Technology has developed three generations of dragonfly-like aircraft.29As shown in Fig. 2,Delfly I, the first-generation dragonfly-like flight system, has a wingspan of 50 cm and a weight of 21 g, using a V-tail to control flight attitude. It successfully flew in 2005.30Delfly II, the second-generation dragonfly-like flight system, has a wingspan of 28 cm and a weight of 16.07 g.It successfully flew and was controlled by a standing-tail.31Delfly Micro,16the third-generation dragonfly-like flight system, made a great breakthrough in 2008. It is driven by a traditional mechanical link structure,equipped with a battery and camera equipment,with a wingspan of only 10 cm and a weight of only 3.07 g.This bionic flight system truly met the concept requirements of a centimeter-level MAV, and won the Guinness World Record in 2009. In 2014, Delfly Explorer32with a wingspan of 28 cm and autonomous obstacle avoidance capability was developed,33and its autonomous flight capability was continuously further improved.34. Furthermore, Delfy Nimble (as shown in Fig. 2(e)), a new generation of fruit fly-like robot developed by Delft University of Technology in 2018,35could accurately reproduce the fast escape action of it even if its rotation axes are not explicitly controlled. It can perform 360°roll and pitch flips,which is very flexible.Moreover,dragonfly-like bio-inspired flight systems have also received strong support from the military of various countries. In 2011, Georgia Institute of Technology, with the support of the United States Air Force, successfully developed a palm-sized dragonfly robot36as shown in Fig.3(a).The flying robot is equipped with a camera, which can fly forward and hover to perform reconnaissance tasks, and its body parts can move like limbs of dragonflies. Moreover, Animal Dynamics received a £1.5 million grant from the UK Ministry of Defence.Defence Technology Laboratory in 2015 developed the bionic dragonfly drone‘‘Skeeter” (Fig. 3 (b)). The project is progressing well and the second phase of research has been enforced.With the development of modern advanced manufacturing technology,in 2017,the Draper Company and the Howard Hughes Medical Institute with the support of the United States Department of Defense combined micro-navigation technology,37synthetic biotechnology and neuroscience technology to modify the gene of the dragonfly,which makes the dragonfly obtain the ability to be controlled and autonomous navigation. As shown in Fig. 3(c), DragonflEye,38a living robot, is half an insect and half a machinery. This project provides a new way for the development of insect-like flight systems.

Fig. 2 Delfly series of dragonfly-like aircraft developed by Delft University of Technology in the Netherlands.

Fig. 3 New representative dragonfly-like aircraft developed in recent years.
In terms of size, the dragonfly is very small compared to birds. But people also hope to further reduce the size of the bio-inspired flight systems for special tasks. Interestingly,flying insects such as flies, bees, and mosquitoes are the most ideal imitation objects for small-sized aircraft. Compared to birds, dragonflies, etc., fly-like bio-inspired vehicles have the highest integration requirements and are usually the most difficult to design.In fact,the University of California,Berkeley,has begun developing insect-like bionic aircraft (known as the MFI project)as early as 1998.39The bionic principle is used to simulate the flight of flies for the development of a small-scale bio-inspired flight system. The MFI has realized the autonomous flight of fly-like aircraft;however,after years of improvement, it has not achieved the ultimate goal of taking off the aircraft without relying on an external power. Until 2006,the MFI team abandoned its original goal and began to develop a bionic flight system with a larger size and weight to achieve the goal of completely autonomous flight.22,24,25Subsequently, Dr. Wood, under the continuous funding of DARPA developed the world’s smallest insect-like microrobot RoboBee in 2013.17The RoboBee40weighs 80 mg and has a wingspan of 3 cm.Its kinematic parameters are captured by an external camera.A copper wire is connected to an external power to supply power and transmit control signals for it,and the flapping frequency can reach 110 times per second.Since the first flight of RoboBee in 2013, Harvard University has continued to improve and upgrade it. The trans-medium flight was achieved for the first time in 2015. In 2016, it had electrostatic adsorption capabilities,so it could inhabit all surfaces and fly away from them at any time.29These seemingly incredible technological breakthroughs made RoboBee reported twice by Science. Currently, this research team plans to challenge the goals not achieved by the MFI project and develop the next generation Robobee that does not rely on external power to take off. This will also be the future challenge of micro bio-inspired flight systems.Of course,the world of insects is wonderful.Different from high-frequency flapping insects such as fruit flies and bees, the flapping frequency of butterflies is only 10 Hz, and their lift and thrust are mainly provided by wings. Therefore, it is possible to mimic butterfly flight with a low-frequency drive structure. The Entomopter,an insect-like flapping-wing aircraft successfully developed by the Georgia Institute of Technology in 2000, adopts a butterfly-wing-like configuration.12The Entomopter has a wingspan of 25 cm and uses the reciprocating chemical muscle to convert the chemical energy of the chemical fuel into the kinetic energy of the chemical muscle to drive the flapping wing to fly.The Entomopter project was later awarded NASA funding to demonstrate the possibility of machine insects for a new generation Mars probes.
2.3. Bat-like flying vehicles
The bats are the only mammal that can fly like birds.The wing structure of the bat is particularly complicated, and its wing and elastic skin have evolved into efficient flight tolls, making the bat a master of flying. The elastic skin of bats makes the study of bat-like aircraft inevitable to discuss the fluidstructure interaction mechanism of flexible structures.Because of this, due to the limitations of technologies and theories,there is relatively few research on bat-like aircraft. In this paper, two very representative bat-like flight systems are shown to illustrate the development prospects of bat-like aircraft in the field of bio-inspired flight systems.
The first typical bat-like aircraft, Microbat, weighs only 10 g, developed by the California Institute of Technology under DARPA funding.As shown in Fig.4(a),Microbat mimics the shape of a bat, with a wing span of only 23 cm. It uses the simplicity of the basic crank and pushrods to drive the flapping wing, and controls the flying attitude through a conventional tail with vertical and horizontal stabilizers. For its wing construction, the batten-type structures are combined with a thin flexible wing,which is easily attached to the leading edge and root ribs of the flapping wing.7From Fig. 4(a), the bat-like aircraft Microbat looks more like a bird.Using a central long body,there are a set of flapping wing at the front and a stabilizer at the rear.The reason why this bird-like aircraft is called a bat-like aircraft is a small vertical tail. The prototype flew for only 9 s during the first test flight, but after a number of improvements, it successfully flew for 25 min in August 2002, setting a world record for flapping-wing aircraft at that time. The second typical bat-like aircraft is Bat Bot (B2 for short),41developed by researchers at the University of Illinois at Urbana-Champaign and the California Institute of Technology. As shown in Fig. 4(b), the wing membrane of B2 uses a silicon-based carbon fiber reinforced membrane with a thickness of only 56 μm, a wingspan of 47 cm and a weight of 93 g.42The overall system is a flapping machine with 5° of Actuation (DoA). Employing the mechanical coupling structure,only one DC brushless motor is used to drive the left and right airfoil flapping at the same time to achieve a 10 Hz flapping frequency. In order to emphasize the existence of the functional group joints of bats, the angular motion of each joint is monitored by a motor control using a Hall encoder. In Fig. 4(c), B2′s avionics is shown. Due to weight and size constraints, B2′s electronics are custom-made and self-sustained,including internal computing, sensing, and power electronics.The Main Control Board (MCB) hosts a microprocessor with several peripherals for communication purposes. It can communicate with terrestrial base stations via DSM2 receiver and Bluetooth. An Inertial Measurement Unit (IMU) is fixed to its ribcage, which monitors attitude information during flight. Currently, B2 can complete the roll and pitch flight,and its research is being further improved. In 2018, Seth Hutchinson gave a detailed introduction to the latest results of his team’s research on bat-like aircraft at the World Robot Conference. A new generation of bat-like aircraft will soon be available.

Fig. 4 Classic bat-like flying vehicles.
There is a complicated relationship between the bat’s shape and its flying ability, so it is very challenging to analyze the movement of bat.Developing a bio-inspired bat robot can deeply understand how bats control their body posture and position through the complex interaction of non-linear forces(such as aerodynamics) and complex musculoskeletal mechanisms.In the future research of bio-inspired flight systems, bat-like aircraft will inevitably become a new and difficult point of research.
3. New bio-inspired flight systems with non-flapping wing
3.1. Bionic flying vehicles with deformation motion modes
The high-efficiency aerodynamic performance of birds’ wings not only is tightly related to their unique flapping motion modes but also depends on their complicated deformation motion modes. During non-flapping flight state, birds can dynamically change their wing postures to maximize adaptability to a diverse of flight behavior (e.g., maneuvering, gliding, and soaring flight) and flight environments (e.g., dense jungle, urban, and mountain environments).43,44Meanwhile,the deformation mode of the bird’s wing posture under aerodynamic loading is an extremely complicated kinematic coupling process, which mainly contains two critical aspects: (A)large-scale geometric wing deformations(e.g.,wing area,wingspan, chord length, and swept angle); (B) small-scale local deformations of each flexible feather (e.g., bending, twisting,and fluttering phenomenon).For instance,swifts actively modify wing sweep to alter sink speed and turning rate during maneuvers.45Albatrosses and petrels enhance wingspan efficiency by extending their primary feather structures, to perform gliding behavior efficiently.46Gliding jackdaws dynamically change spanwise camber through active and passive deflections of their feathers,to reach optimal flight performance.47Vultures and hawks achieve swiftly-soaring behavior utilizing their slotted wingtips.48,49Besides, some research results reveal that the active and passive deformations of the birds’ wings under fluid–structure-interaction coupling can also bring other essential benefits, such as flight stability augmentation, stall avoidance, drag reduction, noise control,etc.50–57To assimilate the superior aerodynamic benefits of the birds’ wings, the how-to approach for the design of the bio-inspired wing configuration has been widely studied in recent decades. As the main lifting surface of each aircraft, a delicately designed wing will, no doubt, enhance its flight performance. At present, the typical design concepts of bioinspired wing configurations can be roughly classified into three major categories: (A) bio-inspired non-deformable wing configurations only considering biological structure elements of the birds’ wings, such as slotted wing-tips, feather flaps,non-smooth wing surface features, serration-shaped leading and trailing edges;(B)bio-inspired deformable wing configurations only considering basic morphing motion features,such as variable-camberdeformations,twistingdeformations,variable-sweep deformations,folding deformations,and inflatable deformations; (C) complex bio-inspired wing configurations considering both the biological structural elements and morphing motion modes.
Like natural flight,morphing wings have great potential for improving the overall performance of the aircraft. By dynamically adjusting or optimizing shapes based on various flight conditions, there are many untapped opportunities beyond current proof-of-concept demonstrations. Ref. 58 discussed the most prominent examples of the 2D and 3D morphing wing models.The methods and tools commonly used to design and analyze these concepts are discussed,from structural analysis to aerodynamic analysis and from control to optimization.In addition to their concept (not repeated here), there are still huge challenges in the application of the aircraft.In design,the passive wing-tip modification devices (e.g., winglets, tip sails,wing grids, delta tips, and multi-winglet),59,60as the most typical representatives of the bio-inspired non-deformable wing techniques, have been widely applied in a variety of military and civil aircraft.The long-term investigation results show that the wing-tip devices can effectively decrease the tip-vortex strength or move it away in relation to the aircraft longitudinal axis, to greatly improve flight performance and flight safety.Also,some researchers,inspired by self-adaptive feather structure features of the birds, have developed some novel biomimetic control methodologies for the flow and noise over airfoils61–69.For example,Wang et al.62experimentally studied the effects of real feather flap on the flow field characteristics of NACA0012 wings. The results revealed that the real feather flap mounted on the suction side or pressure side is proved to be beneficial to improve the aerodynamic performance of the airfoil within a limited range of attack angles. Beierle et al.63studied the influence of the convex structure on the pressure distribution of the bionic wing surface. It was found that the flow around the convex structure is nearly similar to that around the stagnation point. Ito et al.65, inspired by an owl’s leading-edge serration structure, investigated the effects of leading-edge serration structure on the aerodynamic performance of the bio-inspired wing at low Reynolds number. It was found that the leading-edge serration structure can effectively suppress noise and improve lift at a high angle of attack.Gruber et al.66–68systematically investigated the noise reduction effects of both the serrated and slotted trailing edges on NACA65 wings, and the results showed that the two bioinspired structures could significantly reduce the noise by about 5 dB. Based on the large eddy simulation method, Li et al.69have adequately investigated the flow characteristics and acoustic scattering mechanisms of novel owl-based wings with different trailing-edge serrations. The numerical investigations indicated that the saw tooth and sinusoidal serrations provide the most significant noise reduction effects: the maximum noise reduction is about 9 dB.
As another great product of human’s unremitting pursuit of the bird’s deformation motion modes, a variety of the bioinspired deformable wing techniques have made rapid progress in recent decades. The bionic deformable wing configuration,unlike any traditional fixed-wing configuration, can achieve an optimal flight state in different flight conditions and missions by optimizing its shape.Based on structural deformation characteristics, the design approaches of the current deformable wings mainly include the following two major categories:(A) elastic skin deformation driven by a deformable mechanism; (B) multi-rigid-body motion deformation.70The elastic deformation techniques based on smart materials (e.g., piezoelectric, Shape Memory Alloys (SMAs), and other elastic materials) are mainly used for those deformable wing structures with camber morphing,twist morphing,inflatable deformation, and so on.28–38For example, a design concept of integrating Macro-Fiber Composites (MFCs)71into a Micro Air Vehicle (MVA) with camber morphing was developed by Inman et al.72(see Fig. 5(a)). The results reveal that, based on asymmetric and symmetric actuation of the MFC patches mounted on both the left-side and right-side wingtips of the MAV, certain pitching and rolling moments can be generated to achieve attitude control of the MAV to some degree. Also,another MFC concept is about bidirectional camber morphing for thin and thick airfoils.73,74The research results adequately verify that the MFC concept can achieve stable shape control under aerodynamic loading. Sofla et al.75,76proposed and developed a novel bio-inspired variable-camber structure by utilizing the properties of the SMA materials (see Fig. 5(b)).This bio-inspired structure with a great degree of camber morphing is composed of many cylindrical elements connected by ball joints and can accomplish efficient and stable control by heating the SMA belt pairs on both sides of the structure in an antagonistic manner77.Lind et al.78achieved active twisting of a MAV’s membrane wing by torque rods.Similarly,another concept that utilizes a threaded torque rod to actuate wing twist was proposed by Vos et al.79Both the two twist morphing strategies can significantly enhance the overall aerodynamic performance of the wings, particularly in their liftdrag and rolling efficiency.80Cadogan et al. have developed a series of inflatable-wing techniques.Those inflatable systems mainly consist of nastic elements,actuator-induced bump flattening on the wing surface, and trailing edge actuation devices.81Moreover, there are several examples of the multirigid-body deformation approach, such as a variable-span wing structure investigated by Tarabi et al experimentally.82The experimental results showed a significant increase of 17%in endurance and 5%in flight range by means of the span morphing strategy. The second example is given by a multijoint variable-sweep wing structure83whose inboard and outboard sweep angles can vary continuously by utilizing two independent joint actuation elements. The numerical calculation results demonstrated that the variable-sweep wing configuration could indeed enhance the maneuverability and stability of the aircraft.The last example is about a folding Unmanned Combat Air Vehicle (UCAV) developed by Lockheed Martin company.84The folding system of the UCAV, composed of a vacuum system, seamless skin sleeves, and inner support structures, can stably hold a continuous surface structure feature throughout the overall folding process. Meanwhile,a series of tests85,86also validate that the folding UCAV model can effectively morph into the desired shapes under aerodynamic loading.
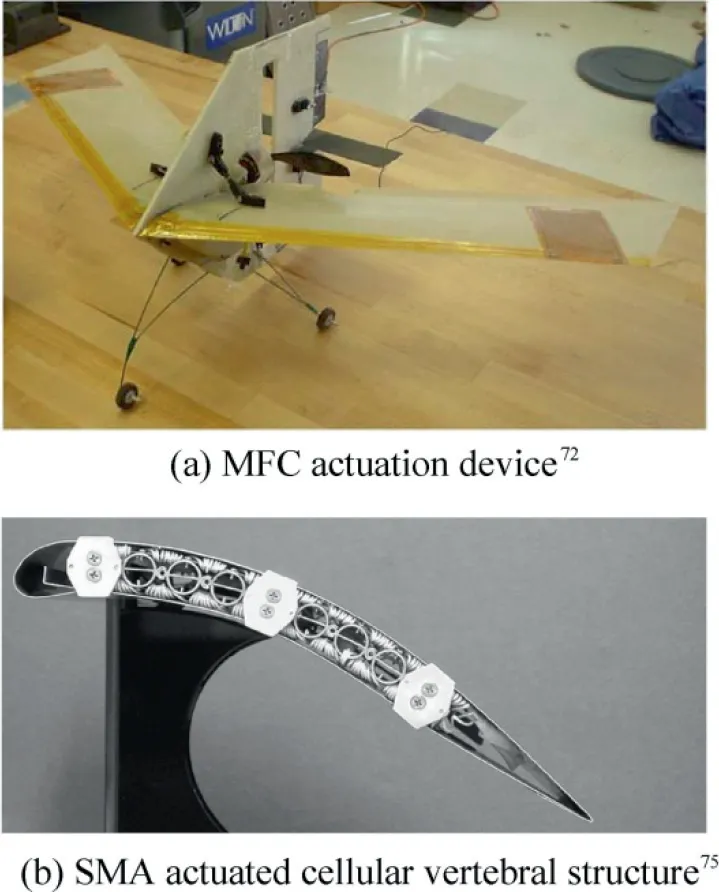
Fig. 5 A variable-camber unmanned aerial vehicle.
Although with many advancements, the shortcomings in the current morphing-wing flight vehicles still cannot be neglected. For instance, most of the research on the bioinspired non-flapping aircraft focused on roughly imitating the basic deformable postures or certain biological features for the birds’ wings, that is, the relevant research about the complex bio-inspired wing technique is still extremely lacking.In recent years,some researchers have proposed and developed some new bio-inspired wing configurations considering both the biological structural elements and morphing motion modes of the birds’ wings. However, there are still some problems in those deformable wing structures,such as low morphing stability and narrow speed ranges. For instance, Wissa et al.87inspired by friction barbules of the birds’ feathers, proposed and developed a morphing segmented wing with barbuleinspired latching (see Fig. 6). The morphing segmented wing structure,controlled by dry adhesives,can be latched together or separated under different flight conditions.The wind-tunnel tests showed that the morphing segmented wing structure under the separated state can delay stall and decrease overall drag. Another example is given by RoboSwift developed by Team.88The deformable wing structure, inspired by discrete feather elements of swift birds,can be dynamically folded into different swept-wing shapes. Dayyani et al.89proposed two analytical methods to calculate the equivalent tensile properties of the coating corrosion skin, ignoring the strain energy term of the elastomer in contact with the glass fiber. Chen et al.90experimentally investigated a bio-inspired morphing discrete wing structure that can simultaneously imitate both the wing postures and the discrete wing surface of a pigeon(see Fig. 7). The investigated results indicated that the bioinspired morphing UAV can always maintain an optimal liftto-drag and rolling performance utilizing the symmetrical and asymmetrical wing morphing. Eric Chang, a PhD student at Stanford University, led a team to test the kinematics of wing flexion and extension for pigeons.They applied their theoretical findings to an aircraft with wings made of 40 pigeon feathers,which are called PigeonBots;pigeon feathers are connected to artificial wings with artificial elastic ligaments. This PigeonBots weighs 280 g and has a wingspan of 80 cm, which is very similar to ordinary pigeons. It uses electric motors and propellers to generate thrust. According to Chang et al., it mimics the dynamics of bird gliding.91In Science, Matloff et al. studied the interactions between individual feathers of various birds, and discovered two main mechanical mechanisms behind the deformation of wings:the passive redistribution of feathers, adjacent and overlapping feathers are held together by a tiny hook-like joint at the root of the feather.92A feathered,biological and mechanized robot is created,which can transform wings. At present, the aircraft including the most frequently used passenger aircraft, are basically fixedwinged. The research on morphing wings is expected to push humans to design aircraft with more flexible wings. By that time,perhaps our aircraft will become smarter,more comfortable and safer,and truly be able to fly freely in a variety of different environments like birds. This is also the goal unremittingly pursued by researchers in the aviation field of various countries in the new situation.
3.2. Other new-concept bionic flying vehicles
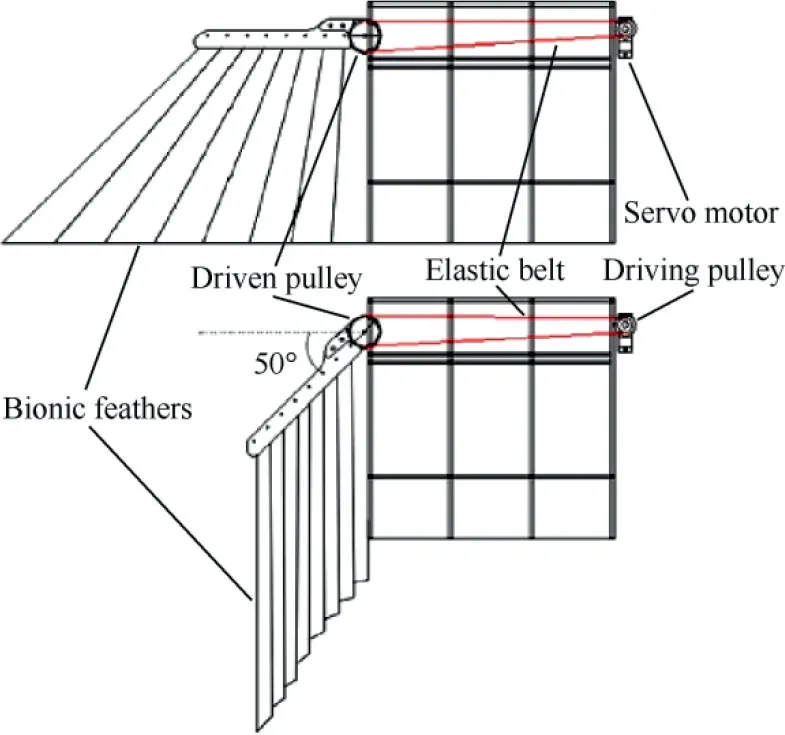
Fig. 7 A bio-inspired morphing discrete wing structure.
In recent years, both the soaring and gliding bionic flight systems have developed rapidly.With the further development of bionic flight technology,based on the three traditional aerodynamic configurations of fixed wing, rotor wing and flapping wing,people have begun to explore the advantages of different configurations mentioned above in order to achieve vertical taking-off and landing,hovering in air and fast forward flying instead of the traditional bionic flying vehicles with flapping wings. The new-concept bionic flying vehicles using nonflapping wing with simple structure and good maneuverability are designed. The new concept bionic flight system is mainly designed to solve the hovering of the aircraft. It is different from a flapping-wing flying vehicle in soaring, and the focus is on hovering. Therefore, in this section, we will introduce them in order to provide inspiration for the future research of the bionic flight systems.
For example, combining flapping and rotating motion modes,the flapping rotary wing bionic aircraft93has appeared in recent years. As shown in Fig. 8 (a), a pair of up and down anti-symmetric wings are used to gain lift and drive its wings to passively rotate and pitch at the same time.94It is found that the aerodynamic efficiency generated by the combined flapping and rotating motion mode is much higher than that generated by simple flapping or simple rotating motion under certain conditions.95The flapping rotary wing bionic flying vehicle has the advantages of high lift, simple fabrication, and potential for miniaturization.It is a new-concept bionic aircraft configuration worthy of attention. For new-concept fixed-wing bionic flying vehicles, Imperial College and Southampton University developed a new bat-wing unmanned aircraft (see Fig.8(b))with a half-meter wingspan in 2016.A variable wing with new thin films was designed by imitating bat wings. The wing of this aircraft adopts a variety of unique designs. The built-in electroactive polymer can control the rigidity of the wing by voltage, and can shrink and change its shape during flight.96This new concept bionic flying vehicle made with this new technology can fly farther and save fuel. The bionic wing aircraft can change shape during flight to adapt to changes in airflow. This will enable drones to better adapt to different environments and enhance their ability to perform multiple tasks.97At present,various new concepts of bionic flying vehicles are being proposed one after another. In the future, with the development of new technologies such as artificial intelligence, more new concepts will be used for bio-inspired flight systems.
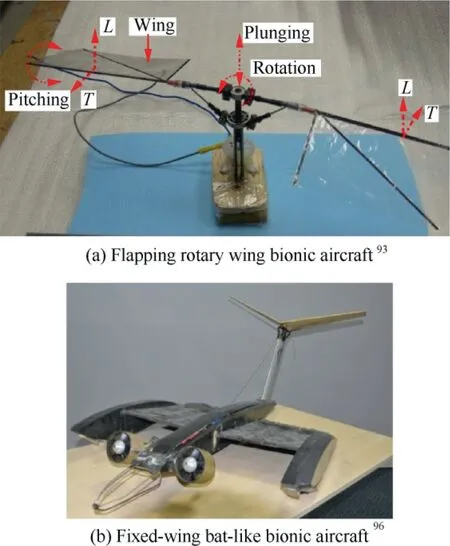
Fig. 8 New-concept bionic flying vehicles.
4. Aerodynamics of flying creatures and bionic flying vehicles
4.1. Aerodynamics of flying creatures
In order to design a new-generation bio-inspired flight system with better flight capabilities, it is necessary to understand the aerodynamics behind the excellent flight capabilities of flying creatures. The current research status of flight biological flow mechanism will be summarized in this section,and related theoretical support will be provided for the design of bio-inspired flight systems. Aimed at several forms of the current bioinspired flight systems, the aerodynamics of birds, insects and bats are mainly introduced. This will be very useful for future research on bionic aircraft.
For birds,they adjust their wings to change their height and speed when they fly.There are several main flight models such as gliding,soaring and flapping flight.For the gliding,it is the simplest flight model. The attitude of the bird’s wings is basically maintained during flight, and horizontal movement is achieved at the expense of altitude.For the soaring,rising airflows are used to increase bird’s flight height, and then gliding model is used to obtain horizontal movement with non-rising airflows.98There is a deeper understanding of the principle for birds’ flight, but there are still many unclear aspects of the deeper microscopic flow mechanism,which has largely limited the design level of bird-like flight vehicles.For the birds in gliding, the ability of birds to glide depends on wind velocity,air drag and their weight. The greater the drag and weight of the birds are, the faster the flying height drops.99On the one hand, the bird’s tail can generate additional lift and reduce induced drag at low speeds.100For example, when gliding,the tail of Swift generates a pair of wing vortexes and a pair of intertwined body or tail interfering vortices in the same direction as the wing vortexes, increasing its lift during gliding.101On the other hand, the bird ’s streamlined body,102the larger aspect ratio,103different geometries,104and different flight modes105are key factors for birds to reduce resistance under changing airflow conditions. If the fixed-wing aircraft mainly imitates the bird’s steady gliding mode, the deformation vehicle is a simulation of the bird’s unsteady gliding mode.The birds need to overcome the resistance in flight to get forward speed,and usually need to flap their wings to get forward driving force. The deformation process during flapping has a significant impact on the aerodynamic characteristics of birds,and adjusting the wings to obtain an optimized aerodynamic surface is very useful in landing and unstable airflow flying environments.106The driving force obtained by flapping the wings mainly comes from the following three parts102: (A)The effect of the tail vortexes. The Karman-Burgers theory believes that the vibration of wings removes the vorticities in the boundary layer, generating reverse Karman vortex street,which carries momentum opposite to the direction of wing movement to generate thrust. (B) The suction in the leading edge. When the fluid flows through the leading edge of birds and their head with large curvature, the local flow velocity increases to form a low-pressure region, which causes the leading-edge suction to generate some driving forces.107,108(C)The effect of inertia.When the wings are flapping,the local additional mass effect produces additional inertial forces. The output power of birds during flight is the main subject to study the principles of birds’ flight. At present, a lot of results have been achieved by measuring the metabolism inside the bird muscle109and external aerodynamics.103These results provide a theoretical basis for the research on the new aerodynamic configuration of flapping-wing aircraft.110
After living beings’ millions of years of evolution, insects have amazing super-maneuvering flight capabilities and super-high flight stability such as hovering,fast taking-off,fast stopping,and fast climbing. The aerodynamics of insects have been explored for hundreds of years, especially in the past 20 years,and with the rapid development of advanced flow display technology and numerical simulation technology,systematic and in-depth understanding of the typical insect flight mechanism has been acquired.111–113Before the 1980s, it was believed that the flight principle of insects was the same as that of helicopter or birds in gliding. Later, it was discovered that the steady flow theory could not be used to explain the high lift required for insects. It was necessary to study the unsteady flow mechanism of high lift generated by insects.114,115So far, the proposed high-lift mechanism of flapping-wing flight mainly includes: the clap-fling mechanism,114the delayed stall mechanism,116the rotational circulation mechanism,111and the wake capture mechanism.111Among them, the clap-fling mechanism believes that insects’enhanced lift depends on flapping motion.114During the clapping and fling, a low-pressure area is quickly formed in the middle of the two wings. The incoming air generates a vortex and does not fall off during fling, resulting in instant high lift.117Many organisms in nature,such as moths,butterflies,fruit flies,and birds,rely on this mechanism to generate lift when they take off. Before the end of the flapping, the insects can generate strong vortexes with different directions in a short time by rapid acceleration or rapid upward motion, and the phenomenon of high lift is called the rotational circulation mechanism.111,118When insects are flapping at a high frequency, their wings will encounter the vorticities generated by the previous flapping when the wings change their flapping direction, causing the flow speed to increase and generate additional lift. This mechanism is called the wake capture by Dickinson.111However,subsequent studies have shown that the effect of wake is mainly to reduce lift.118,119The delayed stall mechanism reveals the high lift mechanism during insect’s parallel translation. When flapping, the leading-edge stalling vortex on the wing surface of the insect does not fall off during the entire parallel translation, thus maintaining the high lift of the dynamic stalling vortex.120The delayed stall phase produced most of the lift during flapping.121The structure and evolution of the leading-edge vortex are very complicated and are affected by many parameters such as Reynolds number,shrinkage frequency, Strouhal number, flexibility and flapping law.For the evolution of the leading-edge vortex over time,the effects of Reynolds number and geometric parameters of wing,many research results have been achieved.122–125
Furthermore, there is another flying master in nature. As the only mammal flying creature, bats are known as the three major flying experts in nature,together with insects and birds.Compared to insects, bats are larger in size and flap less frequently,flying much faster than birds.It has long been thought that bats and birds fly with the same principle. However,experimental studies in recent years have shown that bats have very different flight patterns from birds.126Brown University and Lund University are the representative research institutions that carried out the research on the flight mechanism of bats earlier in the world. Muijres and Johansson’s research team at Lund University have twice introduced the results of experimental results of the research on the flow mechanism of the bats in Science. It is found that when the bat is flying at a low speed, the wings move up very fast and generate lift during the whole flapping process; the tail vortex in the wake region of the two wings of the birds will merge into a single vortex ring,but the tail vortex in the wake region of two wings of the bats remain relatively independent.126,127The vortexes of wingtip remain stable when the wing flaps upward, and fall off when it flaps downward. The direction of vortexes at the root of the wing changed.128As the distance between the vortexes and the wing increases, the strength of starting vortexes and stopping vortexes decreases, but the total number of vortexes remains unchanged. The stopping vortex falls off in the near field but forms a new vortex in the far field.129The leading-edge vortex is generated during slow flight, but it is not generated when hovering. When the wings are flapping upward,the leading-edge vortex rotates rapidly inside and outside the wings and moves with the wings together.130This flying mode is not good for birds, but it is very efficient and energy-saving for bats, which is likely to indicate that bats can actively control the generation of leading edge vortices to obtain better flight performance.130
Kenneth Breuer and Sharon Swartz’s team at Brown University have also been studying the flight mechanism of bats. In 2006, for the first time, they drew eddy current maps of the entire bat wing motion cycle.131Subsequently,the static and dynamic deformations of bat wings under different aspect ratios, flexibility and loads were measured.132The effects of parameters such as the degree of wing bending deformation,flapping amplitude, bat mass, wing inertia and maneuvering load on aerodynamic characteristics and flight performance of bats were analyzed.132It is shown that,as the mass increases,the lift coefficient of the bat and the angle of attack of the wings increase, and the attenuation of the flapping frequency decreases.123From a physiological perspective, studying the effects of internal factors such as wing membranes, skeletons,and muscles of bat wings on mechanical properties, aerodynamic performance, and energy consumption of bats is the focus of recent research by this team.124–138These latest research results provide important basis for the aerodynamic and structural design of bat-like wings. The bat wings have many degrees of freedom in structure, and the deformation mechanism is very complicated.Little is known about how bats control deformation to achieve different flying purposes.These issues are exactly the key issues that must be faced in the development of bat-like bio-inspired flight systems,and are also the current research hotspots of bionic aerodynamics.139–141
4.2. Recent progress of aerodynamics in bio-inspired flight systems
On the basis of understanding the aerodynamics of biological flight, researchers began to use experimental techniques and numerical simulation methods to carry out aerodynamic research on bio-inspired flight systems.The experimental techniques can often provide flight parameters for numerical simulations, which are mainly carried out for the research on some simplified bionic flight. Therefore, the research object here mainly refers to a simplified moving wing to mimic a bio-inspired flight system. However, numerical simulation would reduce the experimental cost and quickly obtain the aerodynamic results. The research object began to transfer from a simple model to a bionic model. Both methods aim to reveal the mechanism of biological flight and develop a novel biologically-inspired flight system. The experimental techniques and numerical simulation methods used in the current aerodynamic research of bionic flight systems are summarized in this section, which will provide researchers who are engaged in the research of bionic flight systems with quick referable and available research methods.
For the study of aerodynamics for bionic flight systems,experimental techniques have always been favored. Here, we present a series of experimental research schemes for aerodynamic problems of bionic flight systems, which will help researchers engaged in experimental research on bionic flight systems to choose the experimental method that suits themselves.In the early research of animal flight mechanism,direct observation and measurement of flapping flight parameters of living animals are the main research methods. In early experiments,only a high-speed camera was used to measure the flapping frequency and flapping angle of the flight creatures,which has made a great contribution to the aerodynamic characteristics analysis of flying creatures. In order to obtain more accurate flight kinematic parameters, a measurement method combining three high-speed cameras and image processing technology has been proposed. And it is widely used to measure the kinematic parameters such as the flapping angle and attack angle of different insects.142–144Moreover, in order to more realistically reflect the effect of wing deformation on flow, and provide dynamic information of the boundary for numerical simulation, it is necessary to measure the dynamic deformation during flight. A series of new measurement technologies have been proposed one after another.145–149However, directly observing animal flight with the aid of measurement tools can only understand the flight mechanics of living things from a macro perspective, and it is difficult to reveal the complex flow mechanisms and mysteries behind their flight performance. Therefore, the emergence of various flow display technologies150–152has provided a powerful means for studying the mechanism of biological flow, especially research related to the high-lift mechanism of insects and the evolution of their unsteady vortexes.
For example, the classical direct momentum integration method is used to estimate the steady load of the bionic structure,153–155and this method has been popularized for the estimation of unsteady loads.156,157Recently, the volume measurement based on phase average Particle Image Velocimetry (PIV) has been successfully implemented. The method uses flow field velocity measurement to estimate the lift and drag characteristics of small aspect ratio moving wings.158Minotti159and Mohebbian160et al. also developed a method for calculating the unsteady aerodynamic of flapping wings from near-field flow data for PIV systems. Recently, Lentink et al.successfully built a test system for measuring the propulsion performance of birds in free flight based on the above methods, which provides a very promising technology for future unsteady effects of calibrating the flight propulsion performance of natural animals in the future.161Furthermore,with the advent of three-dimensional full-field time-resolved PIV testing technology, the method of estimating pressure based on vortex dynamics has also begun to be applied in the study of bionic flow mechanisms.162,163The 4D-PTV is another interesting load testing technology under the Lagrangian framework. In the near future, this technology will provide a clearer vortex topology and the higher prediction accuracy of instantaneous load for the flow field.164In addition to measuring the kinematic and morphological parameters of flying organisms for flight experiment research, the measurement of dynamic parameters and visualization of flow fields are also very important. Although free flight of living animal specimens is the best object, the experimental conditions required are very complicated, training of living specimens is also very time-consuming and laborious, and the number of samples and space are limited.The living specimens in the free flying state are the best test subjects for flight, but the experimental conditions required are very complicated, training of living specimens is also very time-consuming and laborintensive, and the number of samples and space are limited.And the development of bio-inspired flight systems also needs to develop related aerodynamic testing technology. Therefore,in summary, it is important to test the flow mechanism and aerodynamic using a simplified bionic model. The bionic experimental model needs to focus on the simulation of low Reynolds number flow environment, as close as possible to the characteristics of living body motion. Secondly, a model support mechanism that can accurately simulate the movement of flying animals is needed.The accuracy of the bionic motion simulation will directly affect the experimental test results and their credibility. Generally, the movement mechanism of the model needs to be optimized and considered in combination with the specific form and measurement scheme of the bionic model.165It is usually necessary to combine the specific form of the bionic model and the measurement scheme to optimize the model’s kinematic mechanism. The above experimental schemes have provided a wealth of experience for the study of bio-inspired flight systems.It can be seen that there are still many problems worthy of discussion and urgency to be solved in the experimental research of aerodynamics for the bioinspired flight system. Developing an experimental system capable of detecting actual flight dynamic data is a new challenge for modern experimenters.
Of course,it is unrealistic to use only experimental methods in the research of bionic aircraft,and it is extremely convenient to use numerical simulation methods to provide reliable design data for the development of bio-inspired flight systems. Especially in recent years, with the development of various numerical simulation methods, numerical simulation methods have also provided a reference for the study of bio-inspired flight systems.The numerical simulation methods for solving biological movements have also experienced continuous improvement and a long development process. According to the development of numerical simulation methods for bioinspired flight systems, we summarize the research status and existing problems of each numerical method.This will provide assistance for the further study of numerical simulation methods. Since it was discovered that the theory of steady aerodynamics could not explain the formation mechanism of high lift in biological flight,the quasi-steady theory began to be used to calculate the aerodynamics of biological flight. The quasisteady method ignores wing motion and flow field changes,and calculates aerodynamic loads based on the instantaneous speed, shape, and attitude angle of the steady state. The quasi-steady method works well in cases where the unsteady effects are not significant. In the experiments of insect,166wasps,167and hummingbirds,168the thrust required for flight and the aerodynamics of rigid flapping-wing aircraft169have all obtained consistent results with the experiments. Because creatures have strong flexibility, various movement modes,and large changes in attitude during flight, how to accurately simulate complex motion boundaries has become one of the keys to biological motion and bionic flow simulation. Therefore,there are two main techniques to deal with the rigid move boundary in the bionic the numerical simulation of unsteady flow. One is to ignore the autonomous and passive deformation of biomimetic organisms, and abstract their complex motions into the simple motions of bionic models, such as the heaving and pitching motion of the bionic flapping wing170and wave motion of bionic fishes. Another is to give the kinematic parameters of creatures in free flight state using highspeed cameras as the motion boundary conditions for numerical simulation of unsteady flow.171By combining the bionic or the measured kinematic parameters with the unsteady NS equation, not only the numerical simulations of insect lift172and wing-body interference effects173under hovering conditions have been completed, but also the research on the flow mechanism of insects under complex flight conditions has been successfully implemented.174
In recent years,the Lattice Boltzmann Method(LBM)with simple programming,easy integration of new physical models,convenient handling of complex boundaries, and natural high parallelism has also become popular in bionic flow simulations.175,176Combining it with the Immersed Boundary Method (IBM)177to deal with moving boundaries and large deformation has become an alternative to overcome the shortcomings of body-fitting meshes. It has been applied to unsteady flow simulation of 2D or 3D rigid flapping wings,178,179rigid dragonfly180and butterfly.181This numerical method overcomes the difficulty of traditional computational fluid dynamics meshing, which is useful for solving aerodynamic simulations of bio-inspired flight systems with complex motion. Not only the simulation of unsteady flow for the bionic model has been calculated, but also the simulation of maneuvering flight closed-loop control of the bionic aircraft has been performed.182In order to make full use of the parallel characteristics of LBM, our research team has developed a three-dimensional IB-LBM unsteady solver for supercomputers. We have carried out large-scale numerical simulation of bionic flapping wing or flapping multi-wing. The effects of individual distance183and flapping frequency184on the thrust performance of flapping multi-wing are discussed, and the effects of kinematic parameters185and geometric parameters186on the thrust performance of the flapping wing are studied.The refined vortex structure and its evolution process were obtained. LBM has shown great application potential in the study of bionic flow mechanisms and the design of bionic aircraft. One point that needs special attention here is that because the wings of a creature are deformed during flight,how to simulate the unsteady flow mechanism considering flexible deformation is the current research hotspot. The flow mechanisms and aeroelastic effects contained in biological flexible wings are very important for understanding the superb flying skills of insects, birds and bats. Among many numerical simulation methods for dealing with moving boundaries and flexible large deformations, the IBM has shown great advantages in large deformation nonlinear fluid-structure interaction simulations.187Tian Fangbao’s team at the University of New South Wales has made a huge contribution to the study of this method.188–190They applied the improved method to the study of the flow characteristics of the bionic wing, and obtained many promising results.191,192These works provide a certain reference for the development of bio-inspired flight systems.Currently, improving the reliability of fluid-structure interaction methods in biological flight and bionic flow simulation is an important development direction.193In summary, with the continuous expansion of computing resources, using numerical methods to study the aerodynamics of bionic flight systems has become the focus of future research.
5. Conclusions
The bio-inspired flight systems represent the most exciting and challenging direction for the development of future flying robotsy.194With the higher requirements of autonomous and intelligent bionic aircraft, the bionic aerodynamics related to the bio-inspired flight systems also faces greater opportunities and challenges.
(1) For the aerodynamic design of bionic aircraft, new flow control techniques and flight control195strategies need to be explored under the small size and low Reynolds number effect196of bionic aerodynamic research such as aerodynamic layout of bionic aircraft,nonlinear aerodynamics, flight dynamics modeling, autonomous maneuvering, aero-structure-control integrated design,etc. It also provides new opportunities for the research methods of bionic aerodynamics.
(2) In terms of the bionic flow mechanism experiments of bionic flying vehicles,comprehensive measurement techniques that can simultaneously complete the flexible deformation of the bionic wing, visualization of unsteady flow, and unsteady aerodynamic testing are crucial for the flow mechanism and aerodynamic performance evaluation of the bionic aircraft. In terms of numerical simulation technology for bionic flow of bionic flying vehicles, it is necessary to improve the highprecision simulation method of bionic flow with complex moving boundary at low Reynolds number, construct a nonlinear dynamic finite element model and the framework of efficiently solving the aerodynamics for flexible bionic structures, and construct large-scale nonlinear parallel simulation method.
(3) As a complex and highly integrated intelligent system that integrates a variety of advanced technologies, the development of bio-inspired flight systems involves multiple disciplines.In this paper,based on the introduction of the development of MAVs, focuses on the research progress of bionic aerodynamics,and focuses on the bionic flow mechanism, key scientific problems and research methods were sorted out. It is hoped that the design concept of the bionic aerodynamics and bioinspired flight systems will be combined to provide power for the innovation of various bionic aircraft.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Nos. 11872293, 11672225 and 11602199), China Postdoctoral Science Foundation (No.2017M623184), the National Key Laboratory of Science and Technology on Aerodynamic Design and Research of China(No.6142201190408), the Key Laboratory of Aerodynamics Noise Control of China (Nos.1801ANCL20180103,1901ANCL20190108), Australian Research Council (Nos.DP200101500 and DE160101098), and the Program of Introducing Talents of Discipline to Universities of China (known as the ‘‘111” Program, No. B18040).
 CHINESE JOURNAL OF AERONAUTICS2021年7期
CHINESE JOURNAL OF AERONAUTICS2021年7期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Integrated batteries layout and structural topology optimization for a solar-powered drone
- Polynomial networks based adaptive attitude tracking control for NSVs with input constraints and stochastic noises
- Morphing wing flaps for large civil aircraft:Evolution of a smart technology across the Clean Sky program
- SARISTU:Adaptive Trailing Edge Device(ATED)design process review
- Continuous morphing trailing-edge wing concept based on multi-stable nanomaterial
- A hybrid multidimensional Riemann solver to couple self-similar method with MULTV method for complex flows