互质极化阵列的DOA估计算法研究
2021-07-20 04:02赵勇武李晴晴张军星
制导与引信 2021年1期
姜 阳, 赵勇武, 李晴晴, 张军星, 蒋 驰, 董 文
(1.空军预警学院,湖北 武汉430019;2.上海无线电设备研究所,上海201109)
0 引言
被动雷达导引头接收目标辐射的电磁信号,并对目标的角度进行估计,估计精度直接影响制导系统性能。随着被动雷达导引头技术的发展,采用极化天线成为一种趋势。与圆极化天线相比,线极化天线可以对极化角度进行估计。极化信息可以提高被动雷达导引头的分辨力、抗干扰能力等性能。本文针对三正交偶极子天线,研究极化互质阵列的高精度、低复杂度测角算法。
极化敏感阵列由多个电磁矢量传感器组成,目前针对极化敏感阵列的算法大部分是基于均匀阵列的,且阵元间距为半波长。阵元间距过近导致互耦效应明显[1],致使波达方向(direction of arrival,DOA)估计和极化角度估计算法性能急剧下降。并且均匀线阵对阵元间的互相关信息利用不充分,存在信息冗余。因此,减少互耦效应、提高信息利用率将会明显提高雷达测向性能。文献[2-5]提出了将电磁矢量传感器进行稀疏布阵的方法,将阵元间距设置为大于半波长,从而减少互耦效应。而包括最小冗余阵[6]和嵌套阵[7]在内的稀疏阵列布阵是无规律的,即当阵元数较多的时候,无法迅速找出排列方法。将三正交电磁矢量传感器布阵为互质阵列,可使稀疏布阵方式有规律可循。但由于每个阵元相当于由三个方向的线极化天线组成,使得计算复杂度增加,因此如何降低计算复杂度成为极化敏感阵列测向的一个难点。
为减少计算复杂度,文献[8]利用正交偶极子天线组成阵列,并结合四元数算法将协方差矩阵维度降低一半,但该算法无法直接应用于三正交偶极子天线。文献[9-11]提出了基于电磁矢量传感器的嵌套阵算法,通过增加阵元间距提高估计精度,并利用矢量叉乘的方法去模糊。为了得到更加通用的阵列形式,互质阵列被提出。与嵌套阵列原理相同,互质阵列是由两个阵元数与阵元间距都互质的均匀线阵,共用同一个原点排列而成,其中的任意两个互质的阵元间距都是半波长的整数倍。但由于新生成的虚拟阵列存在孔洞,导致阵元的利用率无法达到最大化。文献[12]提出了一种基于六维电磁矢量传感器的差合成方法,利用协方差矩阵形成虚拟阵列,并使用多重信号分类(multiple signal classification,MUSIC)算法进行DOA估计。该算法计算量较大,并且在小快拍数情况下性能急剧下降。
针对如何减少互耦效应、在扩展阵列孔径的同时降低计算复杂度的问题,本文提出了一种基于三正交偶极子互质阵列的极化稀疏算法。该算法充分利用了极化阵列接收通道多的优势,在得到虚拟线阵的协方差矩阵后,将稀疏后的协方差矩阵进行去噪处理。
1 极化互质阵列数学模型
考虑一个稀疏的线阵,该线阵由两个均匀线阵组成,如图1所示。第一条均匀线阵的阵元数为M,阵元间距为Nd,d=λ/2,λ为入射信号波长;第二条均匀线阵的阵元数为N,阵元间距为Md,M和N两个数互质。此时两个均匀线阵除第一个起始点外,没有与起始点间距相同的阵元。当两个均匀线阵共同排列成一条线阵时,形成了一条由M+N-1个阵元组成的稀疏的互质线阵。
图1 两个均匀线阵结构
假设M<N,可以从线阵1和线阵2的位置差中挑选出一条间距为半波长的均匀线阵。互质线阵的阵元位置差C m,n和位置差的集合S可以表示为
将数量较少的子阵变为2M个,且间距不变,实际的物理阵元变为2M+N-1个。这时的阵元间距差可以形成一个从-(2M-1)Nd到(2M-1)Nd的虚拟线阵,其中的连续点可组成从-(MN+M-1)d到(MN+M-1)d的虚拟均匀线阵,这样就可以估计出MN+M-1个信源,极大地提高了阵元的利用率。以M=3,N=2为例,物理阵元与虚拟阵元如图2所示。

图2 虚拟均匀线阵结构
对优化后的互质阵列进行分析,并假设每个阵元由三正交偶极子组成,如图3所示。图中:p m(m=1,2,…,2M+N-1)是第m个阵元到原点的距离,与互质阵列的M、N具体取值有关;θ为俯仰角;φ为方位角。
图3 三正交偶极子稀疏线阵
假设有K个远场窄带信号入射到极化互质阵列上,K个入射信号的俯仰角为 {θ1,θ2,…,θK}。由于是线阵,设置方位角φ=90°,之后的方位角若不加说明则自动代入。当信号为完全极化电磁波时,阵列的第m(1≤m≤2M+N-1)个阵元接收到的第k个入射信号可表示为
式中:s k(t)为t时刻的第k个信号的复包络;ρk为第k个信号的幅度;f为信号频率。三正交偶极子天线可以接收电磁波极化信息,则第k个信号沿坐标轴三个方向的极化敏感向量[e x,k,e y,k,e z,k]T可表示为
式中:γk∈ [0,90°),为极化辅助角;ηk∈[-180°,180°),为极化相位差。将阵列接收模型写成矩阵形式[8],可表示为
式中:A(θ)为导向矢量;X x(t)、X y(t)、X z(t)分别为阵列接收向量X(t)在x、y、z方向上的分量;E x(θ,γ,η)、E x(θ,γ,η)、E z(θ,γ,η)分别为极化敏感矩阵在x、y、z方向上的分量;S(t)为信号矩阵;N x(t)、N x(t)、N z(t)分别为噪声矩阵N(t)在x、y、z方向上的分量。将阵列接收向量X(t)分解成x、y、z轴的三个方向的接收信号是为了方便矩阵重构。为方便起见,下文中E x(θ,γ,η),E y(θ,γ,η),E z(θ,γ,η)和A(θ)分别写成E x,Ey,E z和A。
2 矩阵重构
由式(6)可知,极化阵列输出的信号X x(t)、X y(t)、X z(t)中均含有空域导向矢量A,而根据来波方向和极化角度不同,E x、E y、E z将会取不同的值。当γk为极限值时,会导致某一个电偶极子输出的值很小,甚至为0。例如,当γk=0时,e x,k=e z,k=0,这种值称为失效值。当不考虑噪声时,接收信号的协方差矩阵是3(2M+N-1)×3(2M+N-1)维,其表达式为

式中:E[·]为数学期望函数。
对协方差矩阵R XX进行向量化,可以得到一个9(2M+N-1)2×1维的向量

式中:vec(·)为矩阵向量化运算。这时从9(2M+N-1)2×1维的向量中挑选出2(2M+N-1)+1个元素,形成一个从-(MN+M-1)d到(MN+M-1)d的虚拟均匀线阵。构建虚拟均匀线阵将要面临两个问题:
a)如何避免因为空间角度和极化角度引起个别电偶极子的输出很小,甚至为0,产生失效值的问题;
b)由于噪声的存在,协方差矩阵是一个估计值,如何利用所有的输出数据减小误差的问题。
针对第一个问题,重构式(7)的协方差矩阵,得到一个新的(2M+N-1)×(2M+N-1)维协方差矩阵
由式(9)可知,此时已经避免了由于极化信息引起的极小值,甚至零值,从重构的协方差矩阵R'XX中挑选出的虚拟矩阵将不会存在失效值。
针对第二个问题,设互质阵列物理阵元位置ni,nj(1≤i≤2 M,1≤j≤N)的集合为D,此时阵元位置差集合S可表示为

由式(10)可知,阵元位置差的集合S里的元素是对称的,当m∈S时,-m∈S也成立。因此,下文只讨论正半轴的虚拟阵元。设集合S可组成的虚拟均匀线阵的集合为Z,则Z满足

得到一个加权函数r(m),即协方差矩阵中相同物理量的平均值,表达式为
式中:card(·)为求集合中元素个数的函数;M(m)为满足ni-nj=m的阵元位置(ni,nj)的集合。因此,虚拟的均匀线阵的第m个阵元的输出可以表示为
3 基于矩阵重构的稀疏算法
3.1 前后向空间平滑解相干
通过对极化互质阵列的输出矩阵进行重构,得到了一个虚拟的标量均匀线阵,其自由度由2M+N-1扩大到了2MN+2M-1。通过式(13)对协方差矩阵进行筛选,组成虚拟均匀线阵的输出向量,使原本不相关的信号变为相关,即式(15)中z'的自相关矩阵是秩为1的秩亏矩阵。利用空间平滑算法,在牺牲一部分自由度的基础上,恢复z′的自相关矩阵的秩。前后向空间平滑原理如图4所示。
图4中,虚拟的均匀线阵被转化成了P个子阵,每个子阵包含u个阵元。其中,zfp为前向平滑的第p个子阵的接收数据,可表示为
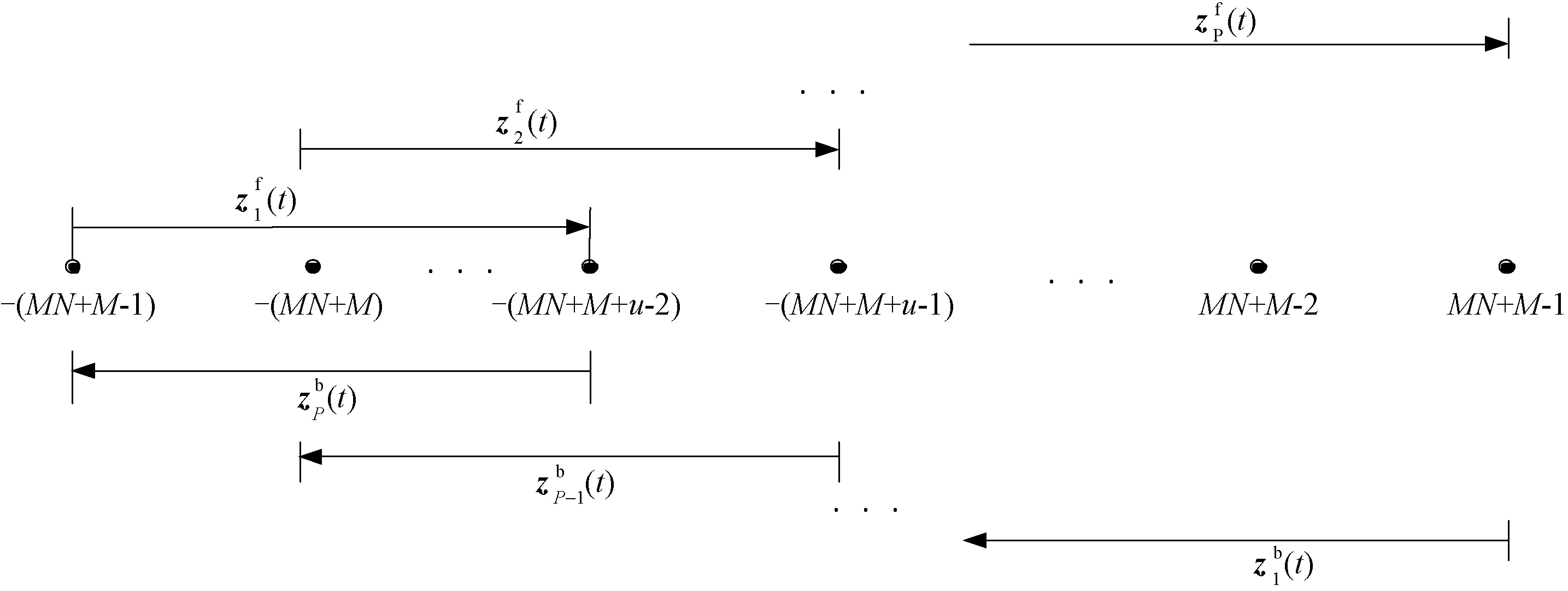
图4 前后向空间平滑的子阵划分
式中:RS=S(t)SH(t),H表示矩阵共轭转置。
为了将协方差矩阵恢复成满秩,需要对各个子阵的协方差矩阵进行加和平均,即
而后向空间平滑与之类似,不同的是子阵从最后一个往前划分,并取共轭。其表达式为
单向空间平滑如果想要解相干,至少需要K/2个子阵,才能把协方差矩阵恢复成满秩。而前后向空间平滑虽然也会损失阵列孔径,但比单向空间平滑的损失小。也就是说,当有K个相关信号入射到阵列时,若每个子阵的阵元数为K+1个,使用单向平滑的方法共需要2K个阵元,而双向平滑只需要3K/2个。而当阵元数N一定时,双向平滑的方法最多可以分辨出2N/3个相关信号,而单向平滑的方法只能分辨出N/2个相关信号。
3.2 极化稀疏DOA估计算法
由于信源的来波方向只占整个空域的一小部分,所以把来波方向在空域中进行展开所得到的信号向量一定是稀疏的。则式(15)的接收数据z'的协方差矩阵可以表示为

若信源数K满足

可以对RXX进行特征值分解,表达式为

式中:UXS和UXN分别为入射信号和噪声对应的特征向量所组成的矩阵;ΛXS是由K个较大特征值所组成的对角矩阵;ΛXN是由3(2M+N-1)-K个小特征值组成的对角矩阵。则当信源数已知时,噪声功率
式中:ΛXN(i,i)为ΛXN中位置为(i,i)的元素。
因此,当信源未知时,可以使用特征值中最小的值进行噪声功率估计,矩阵重构后的噪声功率σ~2=3σ^2。 对式(15)的接收数据z'进行去噪处理,表达式为

将式(35)代入式(21)和式(26),得到去噪后的前后向空间平滑后的协方差矩阵,然后用代替Rz,此时的秩为MN+M。 由于式(31)中,0范数的求解是一个非线性多项式求解问题,所以引入1范数,把原始的非凸函数变为凸函数,可以表示为

式中:ξ为正则化参数。
4 仿真结果
假设极化互质阵列中两个子阵的阵元数分别为M=3和N=5。此时的极化互质阵列的物理阵元数为2M+N-1=10,通道数为10。输入信号为12个不相关的窄带信号。仿真搜索步长为1°,搜索范围为-80°~+80°,拟合误差ξ=4,通过3组仿真实验,对算法性能进行评估。为消除随机误差影响,每项实验均进行500次蒙特卡罗实验,用均方根误差来评价算法的估计精度。
(1)单快拍仿真实验
单快拍情况下,对本文提出的极化稀疏算法与形成虚拟线阵后直接使用MUSIC的算法(以下称为I-Co-MUSIC算法)的性能进行仿真对比。设信噪比为0 d B,快拍数为1,则当12个信号入射到极化互质阵列时,两种算法经过单次实验所形成的空间谱如图5所示。可以看出,基于子空间算法的I-Co-MUSIC算法在单快拍情况下已经失效,而本文提出的极化稀疏算法在单快拍情形下仍然可以估计出12个信号,证明了极化稀疏算法在单快拍情况下,性能要优于I-Co-MUSIC算法。
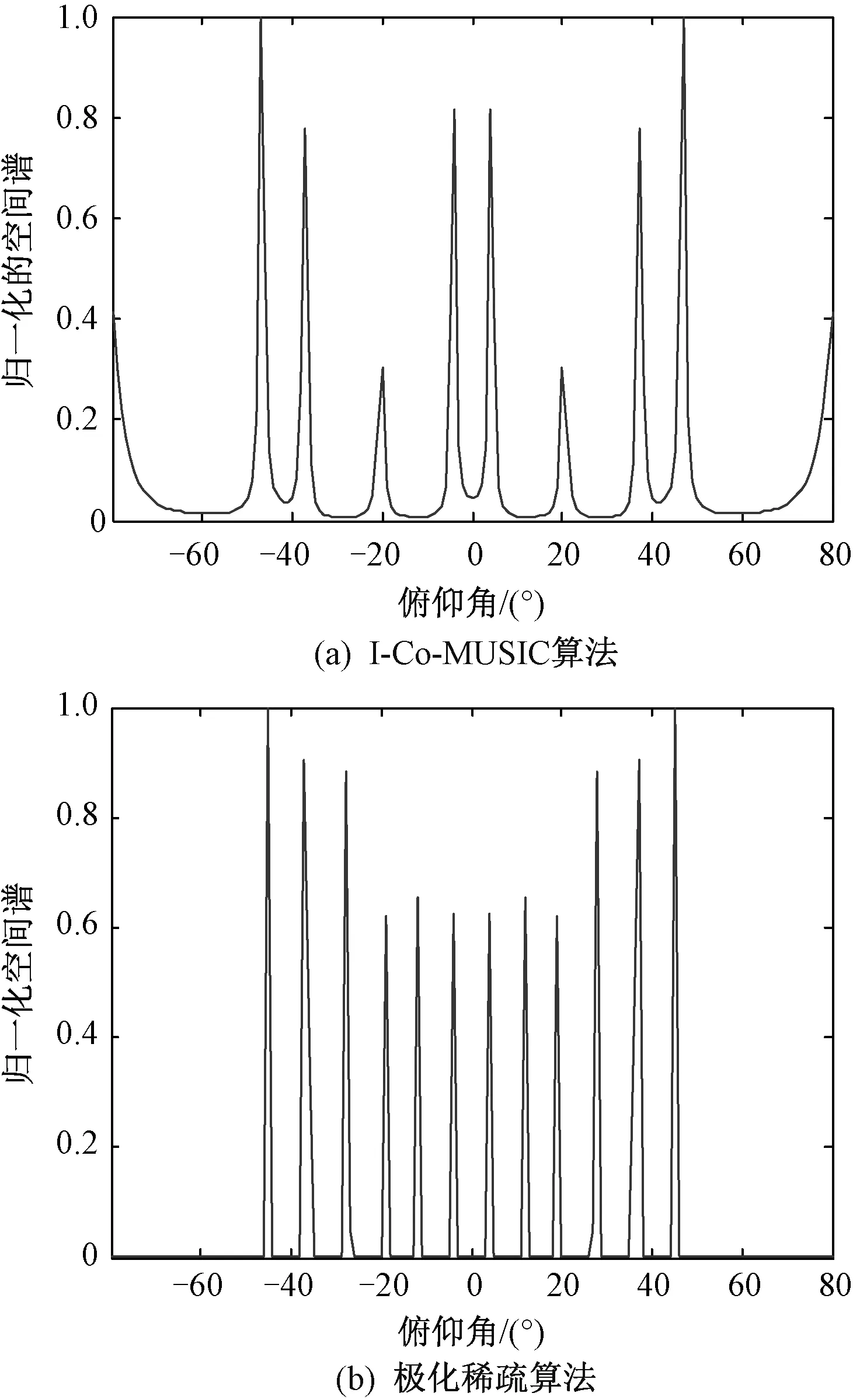
图5 两种算法空间谱对比
(2)不同快拍下仿真实验
对算法的DOA估计精度随快拍数的变化情况进行仿真。设信噪比为-5 dB,快拍数由50变化到500,步长为50。此时极化稀疏算法和I-Co-MUSIC算法的俯仰角估计精度随快拍数的变化曲线如图6所示。可知,在快拍数小于200时,极化稀疏算法精度更高,当快拍数大于350时,I-Co-MUSIC算法精度更高。
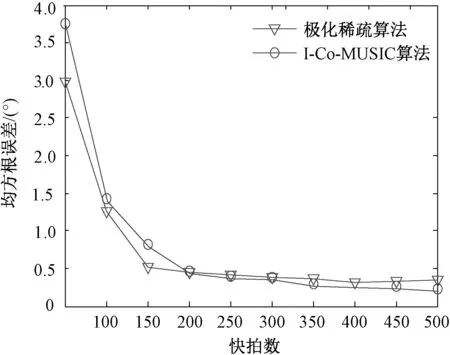
图6 不同快拍数下估计俯仰角的均方值误差
(3)不同信噪比下仿真实验
对算法的DOA估计精度随信噪比的变化情况进行仿真。设快拍数为100,信噪比为(-10~0)d B,步长为1 d B,其他仿真条件不变。极化稀疏算法和I-Co-MUSIC算法的估计均方根误差随信噪比的变化曲线如图7所示。可知,信噪比小于-4 dB时,极化稀疏算法俯仰角估计精度略高于I-Co-MUSIC算法,但是当信噪比逐渐增大,I-Co-MUSIC算法估计精度会超过极化稀疏算法。结合实验2,可知极化稀疏算法和I-Co-MUSIC算法,都可以完成信源数多于阵元数的DOA估计。
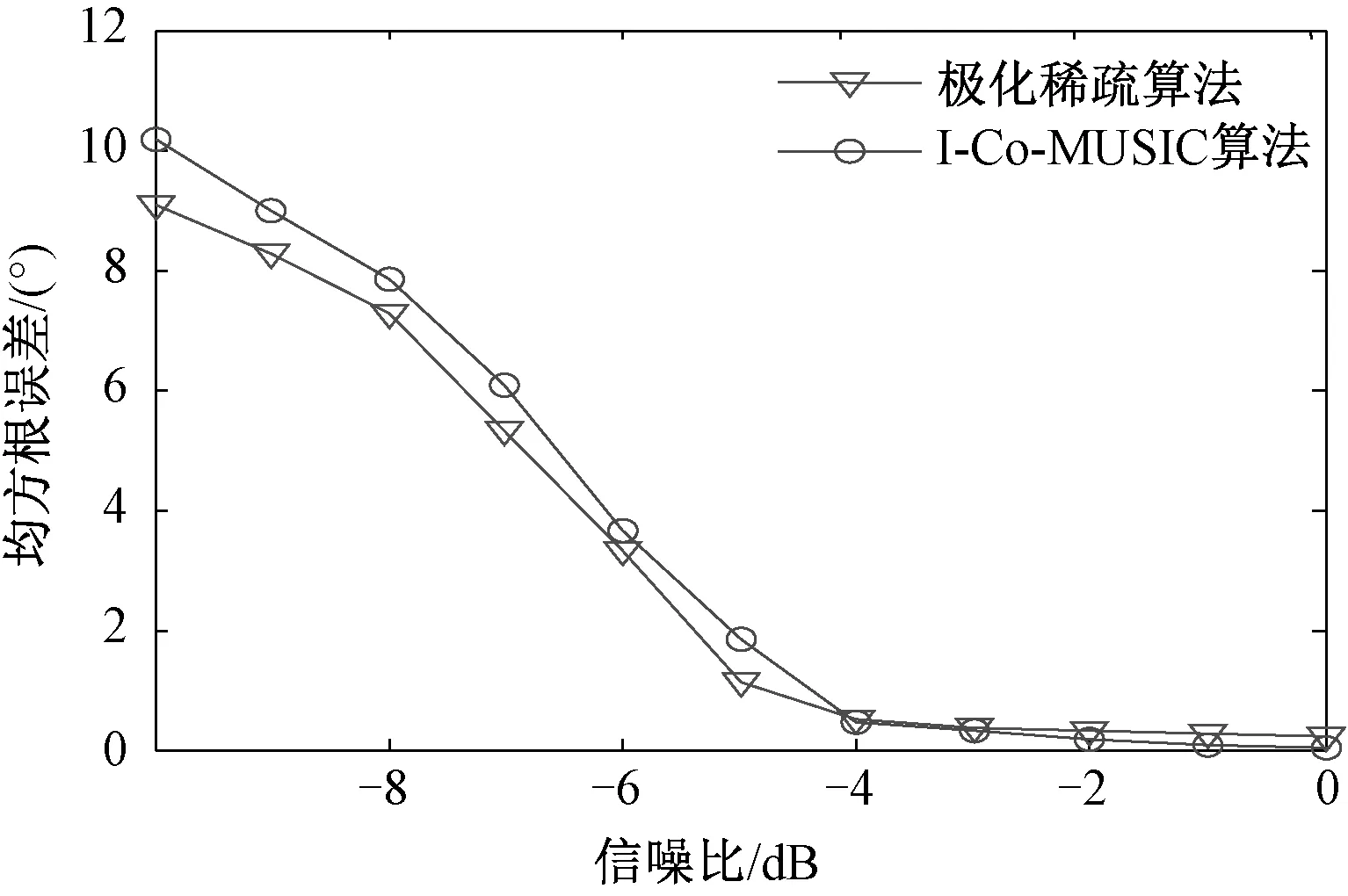
图7 不同信噪比下俯仰角估计的均方根误差
5 结论
本文研究了由三正交偶极子构成的极化互质线阵的DOA估计问题,提出了一种接收数据矩阵重构的方法。该方法充分利用所有的接收数据,形成一个虚拟的均匀线阵,其阵元数大于实际物理阵元数,可以达到扩大阵列空间、提高阵元利用率的目的。形成虚拟线阵后原本不相干的信号变为相干信号,使用前后向空间平滑进行解相干,可以降低孔径损失。该算法利用了空域中信号的稀疏性及三正交偶极子的自身特性对协方差矩阵进行去噪处理,并使用稀疏算法进行DOA估计。仿真结果证明,该算法有较好的估计精度。
猜你喜欢
民族文汇(2022年23期)2022-06-10
航天电子对抗(2022年2期)2022-05-24
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
北京航空航天大学学报(2021年9期)2021-11-02
北京理工大学学报(2021年8期)2021-09-14
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
数学学习与研究(2018年3期)2018-03-14
考试周刊(2016年54期)2016-07-18