基于自动功率控制的EDFA泵浦驱动设计
2021-07-20 04:02姜倩文徐雅燕林瑜佳李文康
制导与引信 2021年1期
姜倩文, 徐雅燕, 林瑜佳, 李文康, 蒲 彬
(上海无线电设备研究所,上海201109)
0 引言
随着卫星激光通信技术向着长距离、高速率的方向发展,对通信链路发射端提出了大功率、高可靠性、高调制速率的要求[1]。掺饵光纤放大器(EDFA)作为空间光通信最常用的光放大器件,面临大功率、低噪声、高稳定性的性能需求。EDFA基本结构主要包括激光泵浦源、掺饵光纤(EDF)以及光无源器件,其中激光泵浦源是决定EDFA增益大小和能否稳定输出的核心因素之一[2-3]。由于半导体泵浦源电流和温度的任何微小变化都会影响EDFA的输出状态[4-5],为保证EDFA的恒定输出,稳定可靠的泵浦驱动控制电路至关重要[6]。
本文设计了一种基于自动功率控制(APC)的高功率EDFA泵浦驱动电路,利用模拟比例-积分-微分(PID)控制电路和基于对数放大的功率监测电路实现对功率驱动电路的闭环控制,保证光放大信号的恒功率稳定输出。
1 级联EDFA结构
为实现高功率的激光发射,系统采用级联泵浦机制对入射光信号进行放大,两级串联泵浦结构如图1所示。分光器Tap1和Tap2按照对应的分配比例将大部分能量透射进光纤系统,同时吸收小部分入射光能量送入光电检测器Monitor1和Monitor2,用以监测EDFA输入或输出光功率。光隔离器ISO1~ISO3可抑制信号光反射形成的自激振荡,并隔离后向放大器自发辐射噪声(ASE)。泵浦激光器Pump1和Pump2用于提供光激励,通过波分复用器 WDM1和WDM2分别将泵浦光耦合至掺饵光纤EDF1和EDF2,将基态铒离子抽运至较高能级。光滤波器Filter1和Filter2对主波长附近的信号光滤波,同时过滤掉泵浦光源产生的噪声光信号,保证输出信号光的光谱质量。

图1 EDFA级联泵浦结构
两级泵浦结构中,由于前级的输入光信号功率较小,为减小系统预放大噪声系数,EDF1长度较短,使光纤内粒子数充分反转,提高前级光放大信噪比。Pump1选用980 nm单模泵浦激光器,内部集成热敏电阻及半导体制冷器(TEC),具有高量子效率、低噪声、高稳定性的特点。Pump1驱动电路设计为固定增益,以获得合适的前级输出功率。Pump2和Pump3采用两路大功率多模泵浦激光器并联设计,通过自动功率控制电路调节泵浦激光器回路驱动电流,保证EDFA的稳定输出。同时二级掺饵光纤EDF2长度较长,当泵浦光增大时能充分转换为信号光,获得较大的输出增益。
2 APC驱动电路设计
2.1 基于模拟PID的功率控制电路
APC采用PID控制系统,如图2所示。系统设定光功率对应的设置电压Uref(t)与输出抽运光功率对应的采样电压Umon(t)之差为功率误差电压Ue(t);Ue(t)进入模拟PID控制器,经过比例单元KpUe(t)、积分单元Ki∫Ue(t)dt和微分单元KddUe(t)/dt处理并线性组合后形成被控电压Uctl(t),其中Kp、Ki、Kd为误差幅度调节参数;再用Uctl(t)对二级泵浦驱动电路的泵浦电流进行控制,从而保证EDFA光功率稳定输出[7]。
图2虚线框内为模拟PID控制器。其中:比例单元KpUe(t)用于即时调节被控系统偏差的比例步进,偏差信号一旦产生,模拟PID控制器便立即产生控制作用,当比例作用过大时可能导致系统振荡次数增加,稳定性降低;积分单元Ki∫Ue(t)dt用于消除系统稳态误差,积分强弱取决于系统积分时间;微分单元KddUe(t)/dt反映系统误差信号变化速率,通过引入误差的偏差修正预判,减小恒功率控制系统的调节时间。
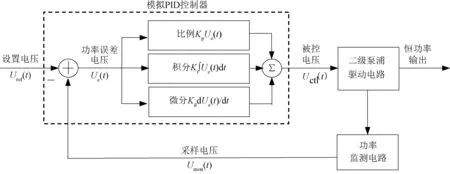
图2 基于PID的自动功率控制框图
本文利用运算放大器构成模拟PID控制器,具体电路如图3所示。
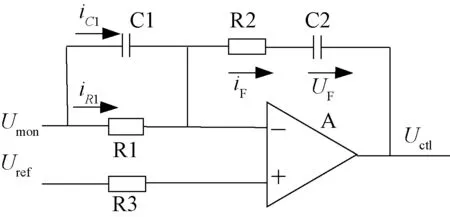
图3 模拟PID控制器电路
根据系统设定的EDFA恒定输出功率值,计算得出二级泵浦驱动所需控制电压Uref。Uref送入运算放大器A的同向输入端,反向输入端为电阻R1、R2和电容C1、C2组成的负反馈控制电路,iF和UF分别为反馈端电流和电压,Umon为经功率监测电路采样的实际输出抽运功率对应电压,由此计算抽运功率控制电压Uctl。

可以看出,被控抽运功率端为负反馈调节机制,当EDFA在工作过程中受到温度或输入光信号扰动时,功率监测电路的探测光功率变化随即被反馈到运放反向输入端,PID控制器电路将根据运放同向输入端和反向输入端的差值电压及时调整驱动回路电流,使系统重新达到动态平衡。
2.2 二级泵浦驱动电路
半导体泵浦激光器为电流注入型器件,驱动电路的电流需连续可调,因此本文设计了图4所示的电流积分负反馈电路来实现驱动电源的控制。因图1中Pump2、Pump3的驱动电路为完全相同的并联电路,图4中泵浦激光器用Pump表示。运算放大器A1选用轨到轨运算放大器AD8552,场效应管MOSFET选用IRL5NJ024。模拟PID控制器输出的控制电压Uctl经过运算放大器A1及电容C1组成的电流积分电路对MOSFET进行控制。改变电容C1的容值可以控制MOSFET的打开时间,消除开关开合时产生的浪涌电流,实现驱动电路缓启动。2.2 V电源为泵浦激光器提供偏压,当MOSFET打开时,激光器回路导通,导通电流由控制电压Uctl决定。电阻R4为采样电阻,本文选用0.1Ω的功率电阻。采样电压经放大后进入信号处理系统,实现驱动回路工作电流的监测和控制。
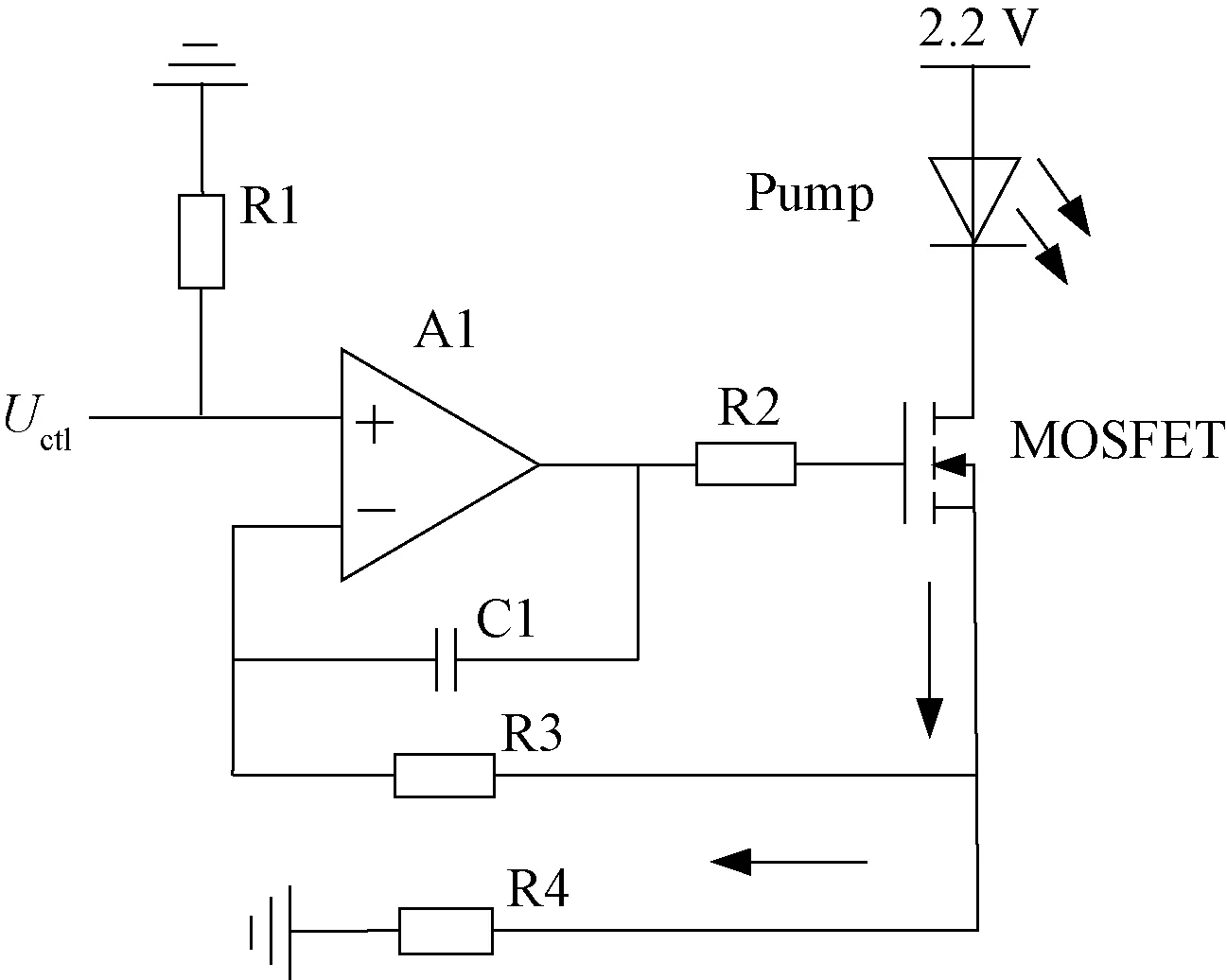
图4 泵浦驱动电路
2.3 功率监测电路
基于对数放大电路设计了一种高精度宽动态范围的功率监测电路。光电二极管将EDFA输出端分光器分得的小部分光信号转换成电信号,经过对数放大电路的放大处理,作为模拟PID控制器的反馈输入信号。原理图如图5所示。
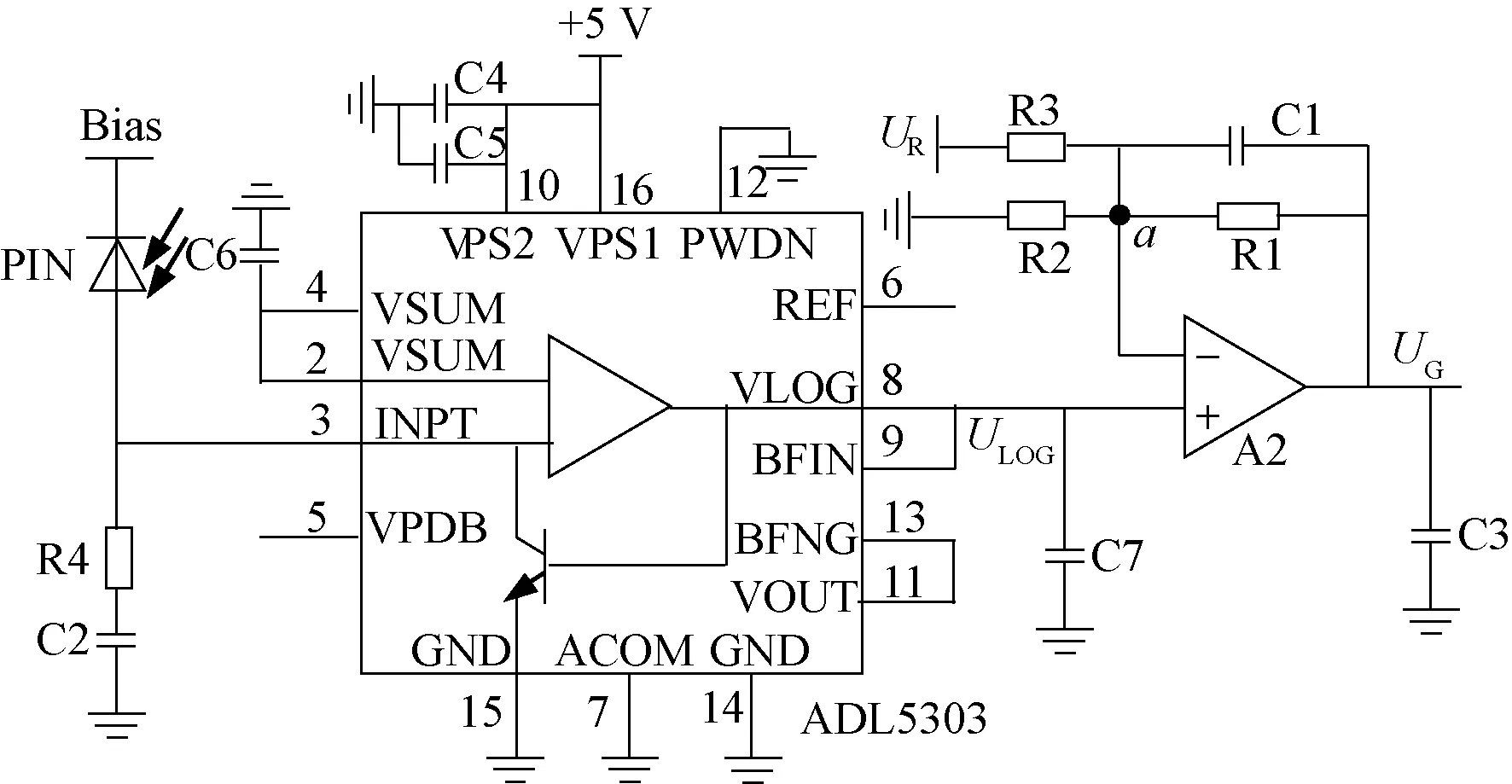
图5 对数放大功率监测电路
光电探测器选用InGaAs型PIN光电二极管,该型光电二极管在1 550 nm波长下响应度为0.95 A/W,具有响应速度快、受温度影响小的特点。选用ADL5303高精度对数转换器,利用双极型晶体管的基极-射极电压与集电极电流的对数关系,实现被探测光电流的对数转换。本电路具有160 dB的动态范围,且对数输出斜率截点可调,以适应电源电压变化。Bias为PIN光电二极管提供反向偏置电压,光照时产生的反向光电流随光强变化,进入对数放大器的输入级。施加于放大器INPT引脚的输入电流IPD与中间级对数输出引脚的电压ULOG关系为

式中:UK为斜率电压;IZ为截点电流。为适应后级信号处理量程子范围,增加了斜率和截点调整电路。调整电路由运算放大器A2和外部反馈电阻R1、R2、R3组成,运算放大器A2同样选用AD8552,UR为外部基准电压源,为缓冲器反馈端提供偏压,UG为监测电路输出电压。根据基尔霍夫电流定律,节点a处的电流i R1、i R2、i R3三者关系为
系统实际输出光功率为(20~33)d Bm,分光比为0.05%时,输出端PD实际接收功率为(-13~0)dBm。若斜率电压UK=0.2 V,截点电流IZ=100 p A,由此计算得到VLOG端输出电压ULOG为(1.14~1.40)V。驱动回路可用量程为(0~5)V,基准电压UR为2.5 V,为获得合适的电压输出范围,反馈电阻的阻值分别为R1=15.0 kΩ,R2=64.7 kΩ,R3=3.3 kΩ,则输出电压UG为(2.03~3.53)V。通过调整反馈电阻R1、R2、R3的阻值,电路可以适用于不同量程范围的功率监测应用。
3 EDFA调试及试验结果
设输入信号光源峰值波长1 559 nm,实际光功率0 dBm,要求EDFA输出光功率在33 dBm以上,且功率恒定可调。
前级泵浦源设置为固定增益,后级泵浦源保证恒功率输出。通过闭环电路监测输出光功率并控制后级泵浦源的驱动电流,当EDFA受输入信号光功率波动或温度等影响导致输出功率变化时,功率监测电路的光电流响应随之发生变化,模拟PID控制器依据偏差量改变控制电压,调整功率输出。采用两个相同泵浦激光器同时工作,可在提高系统可靠性的同时分担大电流压力。输出光功率设定为33 dBm时,2 h内测定的输出功率如图6所示,功率稳定度在1%以内。
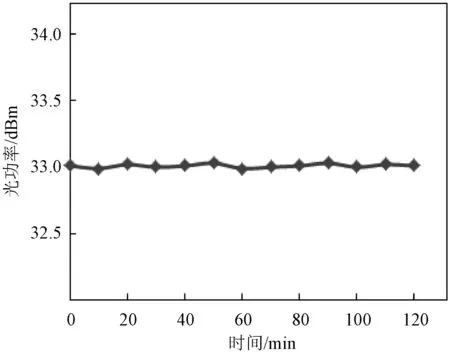
图6 EDFA输出功率实测曲线
被测电路底部设置热沉,测量工作时间2 h内Pump2和Pump3的温度及驱动电流,如图7所示。可以看出,随着后级泵浦激光器温度升高,APC电路实时调整驱动电流,光功率稳定输出,40 min后模块温度趋于稳定,达到热平衡。
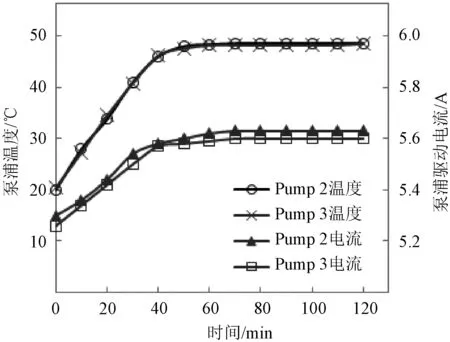
图7 泵浦激光器温度及驱动电流测试
对衰减后的输出信号光进行波长测试,输出光谱如图8所示。输出光谱中心波长为1 559 nm,与输入光源峰值波长一致。

图8 EDFA输出光谱图
4 结束语
本文介绍了一种级联式EDFA自动功率控制泵浦驱动电路。功率控制电路采用模拟PID控制器实现功率误差的实时调整;泵浦驱动电路利用电流积分负反馈实现驱动电源的有效控制;功率监测电路基于对数放大器实现高精度量程可调光电信号的监测。相比利用数字处理器实现功率的自动控制,本设计利用模拟电路闭环调整泵浦驱动电流,使EDFA稳定工作在系统设定的功率点,具有复杂度低、功耗低、可靠性高的优点。试验结果表明:本自动功率控制电路可控制EDFA实现33 d Bm以上的恒功率输出,功率稳定度在1%以内,对实际工程应用中选取控制参数、优化系统性能具有指导意义。
猜你喜欢
制造业自动化(2022年9期)2022-10-03
舰船科学技术(2021年12期)2021-03-29
语数外学习·高中版中旬(2021年12期)2021-03-09
语数外学习·高中版上旬(2020年8期)2020-09-10
速读·中旬(2017年8期)2017-09-04
新高考·高一数学(2016年10期)2017-07-06
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年3期)2015-08-20
微型计算机·Geek(2009年3期)2009-12-11