四悬浮架中低速磁浮车辆曲线通过分析
2021-07-12 09:00:52李茂春郭庆升
新型工业化 2021年3期
李茂春,郭庆升
(1.中车株洲电力机车有限公司,湖南 株洲 412001;2.磁浮交通车辆系统集成湖南省重点实验室,湖南 株洲 412001)
0 引言
中低速磁浮列车是一种新型轨道交通工具,通过电磁铁与特殊的F轨道产生电磁力来提供列车的悬浮力。列车运行时与轨道零接触,具有噪声低、磨耗低、转弯半径小、爬坡能力强、无污染、选线自由度大等优点,是安全可靠、经济适用、环境友好型的城市轨道交通系统,是城市轨道交通发展的重要方向之一。目前中低速磁浮交通系统以五悬浮架为主,国内已有公开资料主要对五悬浮架中低速磁浮车辆导向机构进行了研究[1-4]。但是为满足中小城市的轨道交通需求,对四悬浮架小型磁浮车辆也进行了相关的研究。
本文主要以四悬浮架、空簧端置式中低速磁浮车辆为例,介绍磁浮车辆在小半径曲线线路上低速运行时,并且悬浮架与轨道处于最佳契合位置、空气弹簧水平偏移量最小所确定的理想平衡状态(简称平衡状态)下,悬浮架与车体之间、悬浮架各部件之间的运动关系,以及需分析的项点,并通过作图法对其进行理论计算分析,用于为悬浮架各部件干涉分析、结构设计、部件选型等提供设计依据。
1 悬浮架结构简介
四悬浮架、空簧端置式中低速磁浮车辆悬浮架主要由悬浮架单元、导向机构、滑台装置等部件组成,悬浮架结构示意图见图1。悬浮架单元由模块装配、空簧装置、牵引装置、滑橇装置、支撑轮装置、悬浮电磁铁模块、基础制动装置等部件组成。悬浮架单元三维图见图2。

图1 四悬浮架磁浮车辆悬浮架结构示意图

图2 悬浮架单元三维图
悬浮架与车体之间通过滑台连接,共设置5位滑台装置,其中1、3、5位滑台为活动滑台,通过线性轴承与车体连接,相对于车体只能横向移动;2、4位滑台为固定滑台,通过螺栓连接固定在车体上。在滑台与车体之间设置有两套导向机构,分安装在1、3位滑台和3、5位滑台上,导向机构的长、短转臂分别与车体销接,是导向机构的转心;长短转臂之间通过长拉杆连接,形成平行四边形机构;横向拉杆一端铰接在转臂上,另一端铰接在滑台上。
悬浮模块由左、右模块以及前、后两套抗侧滚梁等部件组成,抗侧滚梁与左、右模块通过关节轴承连接,形成可菱变、扭曲的框架结构,使左、右模块相互解耦。
2 悬浮架与车体之间的空间运动分析
磁浮车辆低速通过小半径曲线线路,并处于平衡状态时,悬浮架在曲线线路上姿态示意图见图3。

图3 四悬浮架磁浮车辆在曲线段悬浮架姿态图
由于车体为一刚体,活动滑台相对于车体只能横向移动,滑台的纵向间距不会发生变化,各悬浮模块相对于车体发生转动,第2/4位左右固定滑台连线的中心(点A)始终在车体的中心线上,构成悬浮模块过曲线时相对于车体的转动中心。导向机构的横向拉杆跟随滑台移动,并带动长、短转臂相对于车体发生转动。
2.1 滑台横移量分析
磁浮车辆通过小半径曲线线路时,活动滑台相对车体横向移动,不同位置滑台的横移量不同,并且线路的曲线半径越小,滑台的横横移量越大。本文通过理论作图法对其进行分析计算,曲线通过分析示意图见图4。考虑极限状态下,作图时取悬浮模块与曲线内切,因悬浮模块与曲线内切时,等效曲线半径最小,滑台的横移量最大。
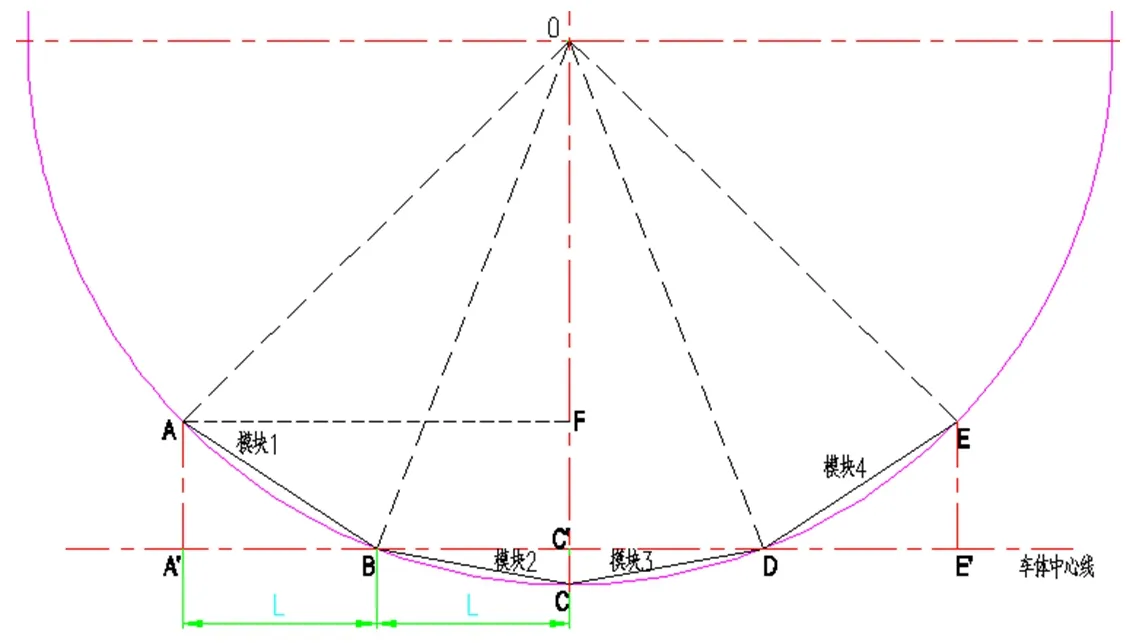
图4 磁浮车辆曲线通过分析示意图
图中:R为平曲线半径,即OA=OB=OC=R;L为滑台的纵向间距(模块长度+模块之间的间隙),L=2800mm;A、B、C、D、E对应1-6位滑台,AA'、EE'为端部滑台(即1、5位滑台)的横移量,CC'为中间活动滑台(即3位滑台)的横移量。由于悬浮架结构的对称性,只需对半节车进行分析。
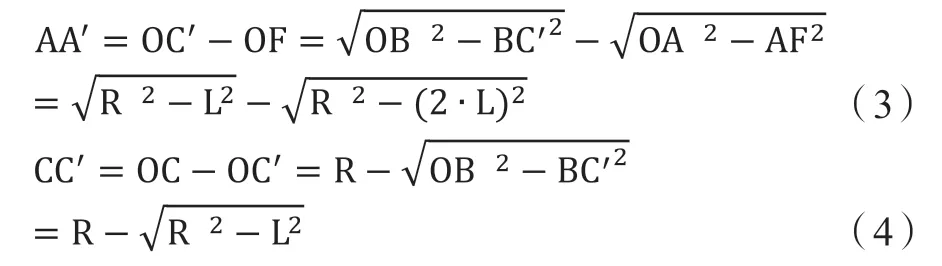
根据图可得出以下公式

可计算得出滑台的横移量为:
磁浮车辆滑台相对于车体的横移量线路曲线半径、滑台纵向间距有关。当线路最小平曲线半径分别为50m、75m、100m时,通过上述公式计算,滑台的横移量见下表1。

表1 四悬浮架磁浮车辆在不同曲线线路上滑台横移量
上述滑台横移量计算结果为活动滑台上线性轴承的选型提供设计依据,确保选用的线性轴承具有足够的行程,另上述计算的横移量只是滑台单侧的横移量,但实际过程中,线路存在双向曲线,需考虑滑台相对于车体两侧的横移量。
2.2 导向机构运动分析
磁浮车辆低速通过小半径曲线线路时,为使悬浮架能够更好的拟合轨道,达到平衡状态,导向机构横向拉杆应跟随相应滑台移动,导向机构长、短转臂跟随转动,并在理想状态下导向机构内部不应存在应力。导向机构的姿态示意图见图5。

图5 曲线段导向机构姿态示意图
图中:S1、S2为长、短转臂端部的横移量,m1、m2可分别近似于1位滑台、3位滑台的横移量,长、短转臂端部的横移量近似于对应滑台的横移量,即S1≈AA',S2≈CC'

由于R>>L,故
由于导向机构为平行四边形机构,长、短转臂的转动角度一致,设为Υ,设长转臂长度为m1,短转臂长度为m2,可得:

上述计算结果为导向机构的尺寸设计提供了依据,参照长沙磁浮导向机构机构尺寸,四悬浮架磁浮车辆中导向机构长转臂的长度设置为600mm,短转臂的长度设置为200mm。
转臂的转动角度,可得出不同曲线线路情况下,导向机构转臂的转动角度见下表2,计算结果用于导向机构与车辆设备布置的干涉分析。
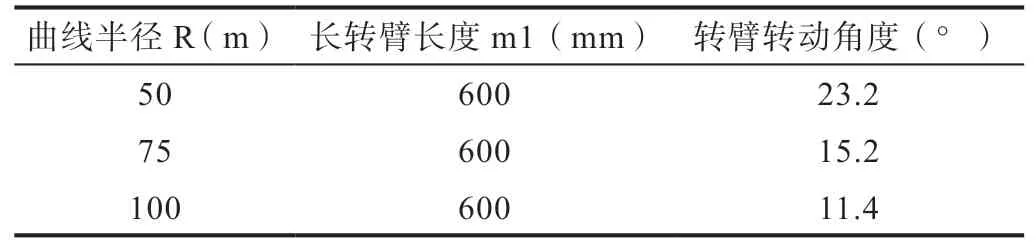
表2 四悬浮架磁浮车辆在不同曲线线路上转臂的转动角度
3 悬浮架内部空间运动分析
3.1 悬浮模块之间运动分析
磁浮车辆低速通过小半径曲线线路,悬浮架以平衡状态跟随线路运行,各悬浮模块之间会发生相对转动。因悬浮模块的左、右模块相互解耦,只需对单侧进行分析,示意图见图6。

图6 模块之间空间运动分析示意图
图中:L为滑台纵向间距(模块长度l+模块之间的间隙d);B为模块最边缘至电磁铁中心线的距离;X为模块2与模块3在曲线上间隙缩小量,Y为模块1与模块2在曲线上间隙缩小量;α为模块2与模块3之间的转动角度,β为模块1与模块2之间的转动角度;l1、l2分别为模块1、模块2 的等效长度。
由图可看出,l1>l2>L,相应的β>α,但由于在曲线半径R为50m、75m、100m时,滑台的横移量远小于滑台的纵向间距L。故l1≈l2≈L,β≈α,即相邻模块之间的转动角度近似相等。可得

参照长沙磁浮车辆,设L=2800mm,l=2720mm,d=80mm,B=400mm。磁浮车辆在不同半径曲线线路上,相邻悬浮模块之间的转动角度、间隙缩小量见下表3,用于后续模块之间的干涉分析。
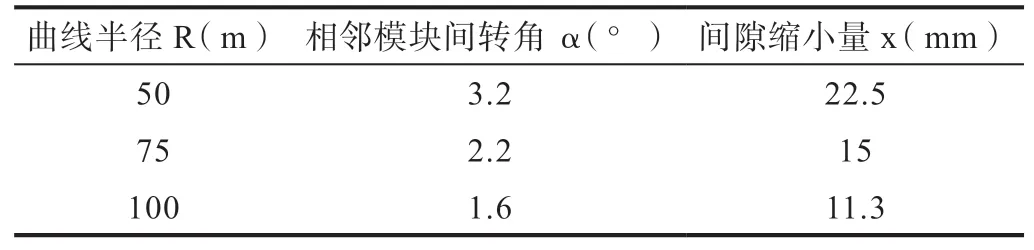
表3 四悬浮架磁浮车辆相邻模块之间的转角及间隙缩小量
3.2 单个悬浮模块空间运动分析
磁浮车辆低速通过小半径曲线时,为使悬浮架处于理想平衡状态,模块会发生菱变,左、右模块与抗侧滚梁之间存在相对转动,由于悬浮架结构的对称性,只需对半节车进行分析,模块的棱边姿态示意图见图7所示。

图7 曲线段模块棱边姿态示意图
图中,θ、β分别为第1、2模块中抗侧滚梁与模块的转动角度,α为相邻模块之间的转角,L1、L2、L3、L4、R1、R2、R3、R4分别表示模块1-4的左、右模块,X1、X2分别为模块1、模块2左右模块的错位量。由图可看出:

公式中D为抗侧滚梁的初始长度,参照长沙磁浮,设D=1260mm。磁浮车辆在不同曲线线路上,悬浮模块中抗侧滚梁与左、右模块的转动角度见下表4,用于后续抗侧滚梁与模块之间的干涉分析。
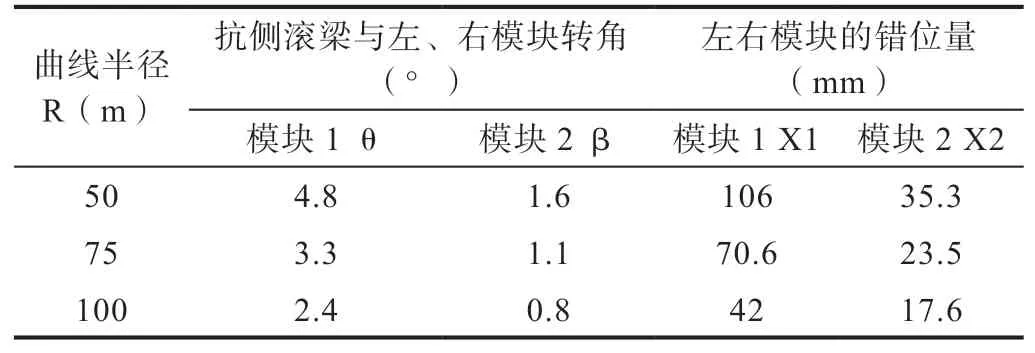
表4 抗侧滚梁与左、右模块的转动角度及左右模块的错位量
4 结语
四悬浮架磁浮车辆低速通过小曲线半径,悬浮架以平衡状态跟随线路运行时,通过理论作图法对悬浮架的空间运动情况进行分析,得出滑台相对于车体的横移量、导向机构的运动情况、相邻两模块之间的转动角度、抗侧滚梁与模块的偏转角度等,可用于指导线性轴承的选型、导向机构的尺寸设计及悬浮架与车体、悬浮架内部各部件的干涉分析。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:04
佳木斯大学学报(自然科学版)(2021年6期)2021-12-21 00:35:08
轮胎工业(2020年2期)2020-03-01 23:46:46
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
装备环境工程(2015年5期)2015-02-28 01:20:38
装备环境工程(2015年5期)2015-02-28 01:20:34
装备环境工程(2015年5期)2015-02-28 01:20:27
机械工程师(2015年7期)2015-02-18 12:01:18