不同能量管理策略的增程电动汽车排放的实际道路试验
2021-07-03 02:51王煜安罗佳鑫王亚超葛蕴珊
汽车安全与节能学报 2021年2期
王煜安,罗佳鑫,王亚超,王 欣,葛蕴珊*,蒋 震
(1. 北京理工大学机械与车辆学院,北京 100081,中国;2. 中国汽车技术研究中心有限公司,天津 300300,中国)
增程式电动汽车兼备纯电动汽车与混合动力汽车的优点,它在技术特点上属于串联插电式混合动力汽车[1]。当车辆电池组电量较高时,由动力电池提供驱动电机所需的电力,当电池组电量较低时,发动机启动并通过发电机与动力电池一起提供驱动电机所需的电力。
刘成祺等人[2]研究了增程式电动汽车在北方冬季典型道路行驶时的电耗与油耗,试验结果表明,增程式电动汽车在高速路况电耗最高,拥堵路况油耗最高。P. Lijewski等人[3]对增程式电动汽车与并联插电式混合动力汽车进行了实际行驶排放(real driving emission, RDE)对比试验,结果表明增程式电动汽车的一氧化碳(CO)、碳氢化合物HC排放更高,在高速区间CO的瞬态排放升高了10倍,氮氧化物(NOx)的排放随着发动机高负荷工作时间的增加而增加。
已有研究表明: 驾驶行为[4]与交通状况[5]会影响到汽油发动机的污染物排放,由于增程式电动汽车的发动机不直接通过机械连接输出功率,所以驾驶行为与交通状况是否会影响到增程式电动汽车的实际道路排放需要进一步通过试验验证。由于瞬时排放测量存在偏差,瞬时低排放易受到这两者的影响而不能很好的反映瞬时排放的真实值。而瞬时高排放作为总行程累计排放的主要贡献者,能够更好的反映排放特征。
Z. Mera等人[6]首先提出可以通过NOx瞬时高排放集合对柴油车的NOx排放进行分析,其中瞬时高排放集合是由原始排放数据聚类获得。WANG Yachao等人[7]也利用了瞬时高排放集合 (instantaneous high emission set, IHES) 对混合动力汽车的细颗粒数量 (particle number, PN) 排放影响因素进行了分析。
本文对2辆具有不同能量管理策略的增程式电动汽车在不同驾驶工况下,分别进行了实际行驶排放(RDE)试验,其中驾驶工况分别为:正常驾驶、激进驾驶、拥堵路况驾驶3种。从CO、PN原始排放数据聚类,获得瞬时高排放集合(IHES),并通过发动机转速与节气门开度等参数,分析了CO、PN瞬时高排放产生的原因,以研究不同能量管理策略和驾驶工况对CO、PN排放的影响。
1 试验方案
1.1 试验设备
试验设备为Horiba公司生产的OBS-ONE便携式车载排放测试系统(portable emission measurement system, PEMS)。该设备主要由气体分析模块、粒子数量计数模块和排气流量计3大模块组成。其中CO2和CO的气体浓度使用不分光红外法(non-dispersive infrared, NDIR)测得,NOx的气体浓度使用化学发光探测法(chemiluminescent detector, CLD)测得,PN的数量则由凝结粒子计数器(condensation particle counters, CPC)测得。发动机的转速、节气门开度等瞬态状态通过车载诊断系统(on board diagnostic system, OBD)测得,车辆行驶速度、海拔高度以及温湿度等信息则由全球定位系统(global positioning system, GPS)和气象模块测得。
1.2 试验车辆
本试验选取两辆满足国六排放法规的增程式电动汽车,并根据国六排放法规[8]附录R中对于混合动力汽车I型试验的要求确定两车的平衡电量。车辆主要的技术参数由表1所示。
A车的能量管理策略为多点控制,多点控制策略会预先设置多个处于高效区或经济区的发动机工作点,增程器根据整车功率需求调整发动机在预设的工作点工作,其发动机供油方式为进气道喷射(port fuel injection, PFI)。而B车的能量管理策略为功率跟随,发动机根据整车功率需求实时调整工作点以工作在最优工作曲线附近[9]。当同一车辆进行不同驾驶工况试验时,能量控制策略预先设定并保持不变,其发动机供油方式为汽油缸内直喷(gasoline direct injection, GDI)。

表1 试验车辆主要技术参数
1.3 试验路线
试验路线按照国六排放法规的行驶路线要求进行设计,市区、市郊以及高速阶段的总里程及其占比均符合RDE的行程要求。试验地点位于北京大兴区与通州区,试验时均为晴朗天气。
试验中激进驾驶要求驾驶员仅在市区、市郊阶段加减速时比正常工况更为剧烈,拥堵路况则选择周一8点的早高峰时段开始试验,此时市区较为拥堵,车辆低速行驶时间较长。表2列出了6次试验各自的“激进程度”[va]p-95、市区阶段的平均车速v、试验时长T、试验总里程S等信息。[va]p-95为大于0.1 m/s2的正加速度a和其对应车速v的乘积va,再升序排列后的第95分位值,表征总行程的激进程度。(国六法规中的符号为“v*apos-[95]”,本文简化为[va]p-95,下标p代表正加速度的含义)。
从表2中可以看出,相较于正常驾驶工况,激烈驾驶工况对应的[va]p-95明显更高,A、B两车分别达到了16.98、17.80 m2/s3;拥堵路况驾驶工况则对应更低的平均车速与更高的试验时长,A车为35.75 km/h和7 522 s,B车为36.77 km/h和7 345 s。
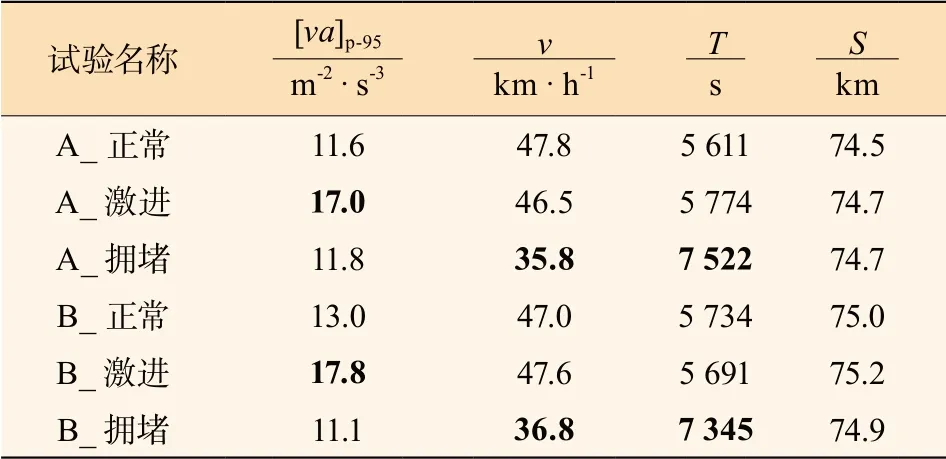
表2 各试验行程信息
2 试验结果预处理
2.1 数据处理方法
不同的计算方法会对排放量的计算结果产生较大影响[10],本文采用数据平均法计算最终污染物的排放量,即用总累计排放除以总试验里程,不做任何数据平滑或加权处理,反映的是真实排放水平。
2.2 瞬时高排放集合聚类
本文以CO的瞬时高排放集合(instantaneous high emission set, IHES)聚类过程为例。
步骤1:计算单次试验总行程累计污染物质量排放mtot,并对试验每1 s采集记录的CO瞬时质量排放降序排列。
步骤2:将降序排列后的CO瞬时排放数据逐个累加:

式中,Δmk为在k时刻,1 s内的质量排放。
步骤3:分别对贡献了mtot前20%、50%、80%的CO瞬时高排放集合IHES 20、IHES 50、IHES 80进行分析。即若mk小于mtot的20%、50%、80%,则将当前时刻的Δmk以及对应的车辆、发动机瞬时数据分别加入IHES 20、IHES 50、IHES 80。
2.3 CO瞬时高排放集合分析
表3表示CO瞬时高排放分别贡献CO总质量排放前20%、50%、80%时的瞬时质量排放临界值(e(CO))及其在试验总时间的占比(τ)。
表3可看出,A车的CO瞬时高排放更为集中,在3种不同的驾驶工况下,均在1%,5%,20%的试验时间内排放了超过CO总排放量的20%,50%,80%。而B车的CO瞬时排放更为分散,在40%的试验时间内才排放了超过CO总排放量的80%。
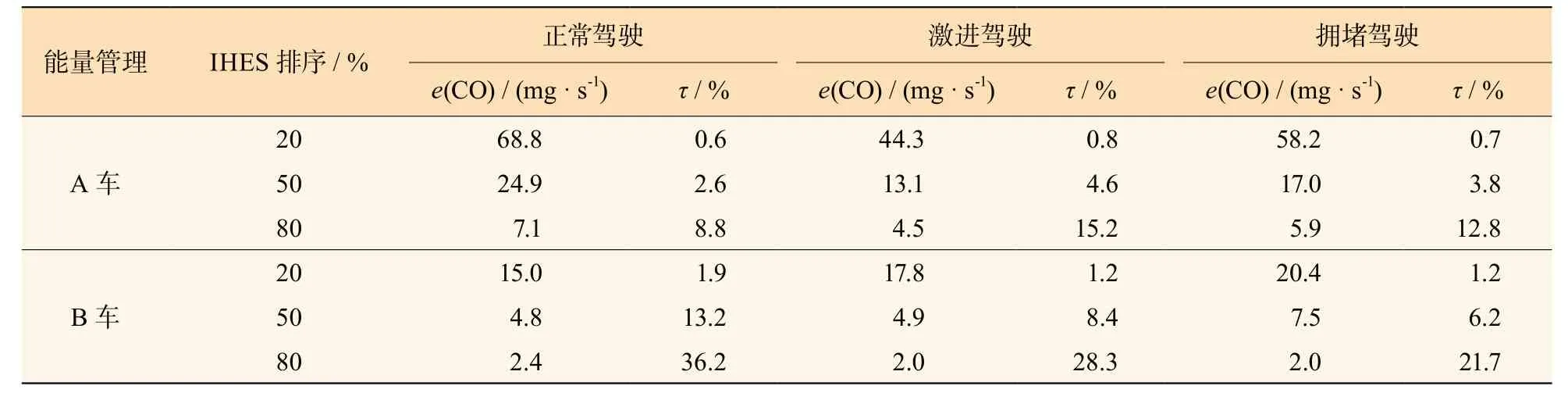
表3 CO瞬时高排放的临界值与时间占比
2.4 PN瞬时高排放集合分析
表4表示A、B车PN瞬时高排放分别贡献PN总质量排放前20%、50%、80%时的瞬时质量排放临界值(e(PN))及其在试验总时间的占比。由表可以看出A车的PN瞬时高排放更为集中,在3种不同的工况下,均在0.2%,1%,10%的试验时间内排放了超过PN总排放量的20%,50%,80%。与CO排放规律类似,B车的瞬时排放分布同样更为分散,在40%的试验时间内排放了超过PN总排放量的80%。这是因为B车装配了汽油机颗粒捕集器(gasoline particulate f ilter, GPF)所导致的,GPF能够捕集汽油机排放的颗粒,从而改变了PN排放的分布规律。
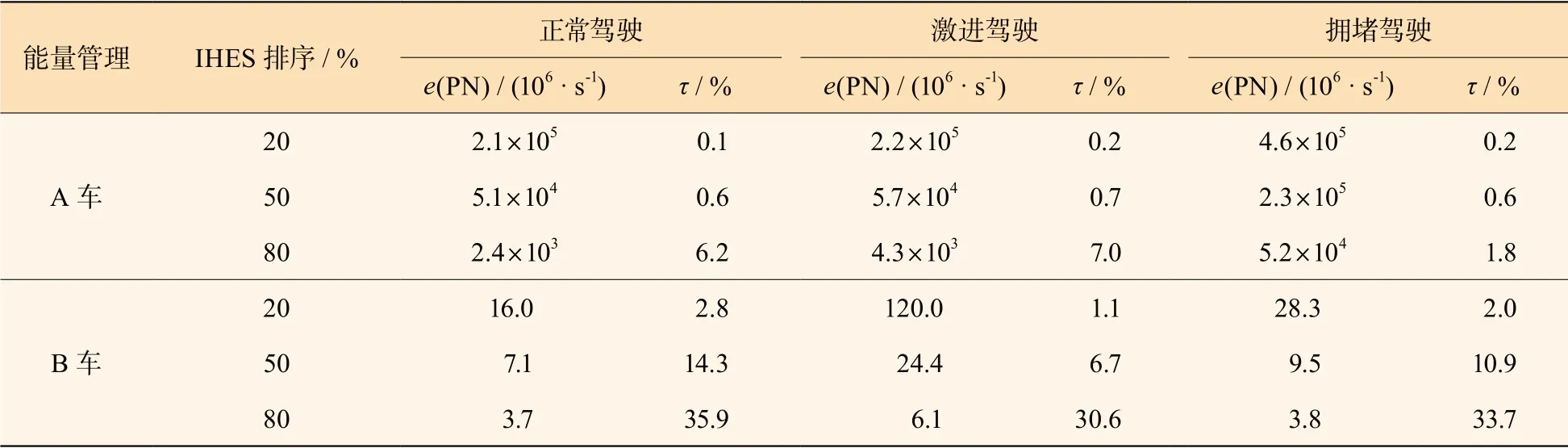
表4 PN瞬时高排放的临界值与时间占比
3 结果分析
3.1 CO原始瞬时排放及排放量
图1为数值平均法计算得到的2车不同工况下CO总行程质量排放量(em)。A车在拥堵路况下CO排放明显劣化,达到了298 mg/km,而B车未观察到明显劣化。
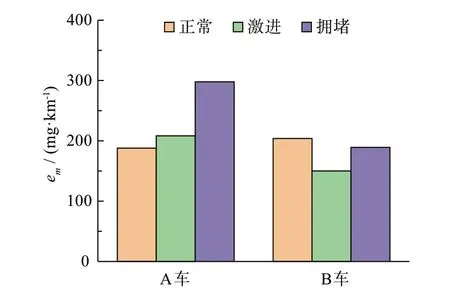
图1 2车不同工况下CO总行程质量排放
图2给出了2车正常工况下CO原始瞬时排放(e)与发动机转速(n)随时间的变化曲线。A车CO的最高瞬排集合HES20除了在冷启动期间产生以外,多集中于高速阶段的高转速变化区域(见图2a),而B车CO的最高瞬排集合HES20集中于发动机各启动阶段。这是由于2车的能量管理策略差异所导致的,A车发动机工况变化时转速负荷变化相对剧烈。而B车在高速阶段工况变化更为缓和(见图2b)。此外,A车的发电机功率和动力电池容量较小,在高负荷工况或馈电状态下,需要频繁启动发动机,CO控制效果相对较差。
3.2 CO瞬时高排放影响因素分析
表5和表6表示A车CO各瞬时高排放集合HES以及总行程的发动机转速变化率与节气门开度变化率的分布,取上四分位数(U)和下四分位数(D)进行表示,其中总行程数据即HES100中包含的所有数据。
由表5可看出:A车的瞬时高排放集合HES20、HES50对应的发动机转速变化率明显高于HES80与总行程对应的变化率。
由表6可以看出:HES20、HES50也对应了更高的节气门开度变化率分布。这与上文结论一致,即A车的多点控制策略依赖预设的工作点,高效经济区较窄,发动机工况变化相对剧烈。在高速加速阶段,整车需求功率较大,A车需要频繁地调节转速与负荷以使发动机工作在高效经济区。在这过程中,空燃比控制较难,易跳出闭环控制从而出现混合气过浓的情况[11]。而B车的瞬时高排放集合的发动机转速变化率与节气门开度变化率并未明显升高,这是由于B车的CO瞬时高排放集中于发动机启动阶段,B车功率跟随的控制策略在需求功率较大时发动机转速和负荷的变化幅度相比A车更小,更利于空燃比的控制,降低了产生CO瞬时高排放的风险。
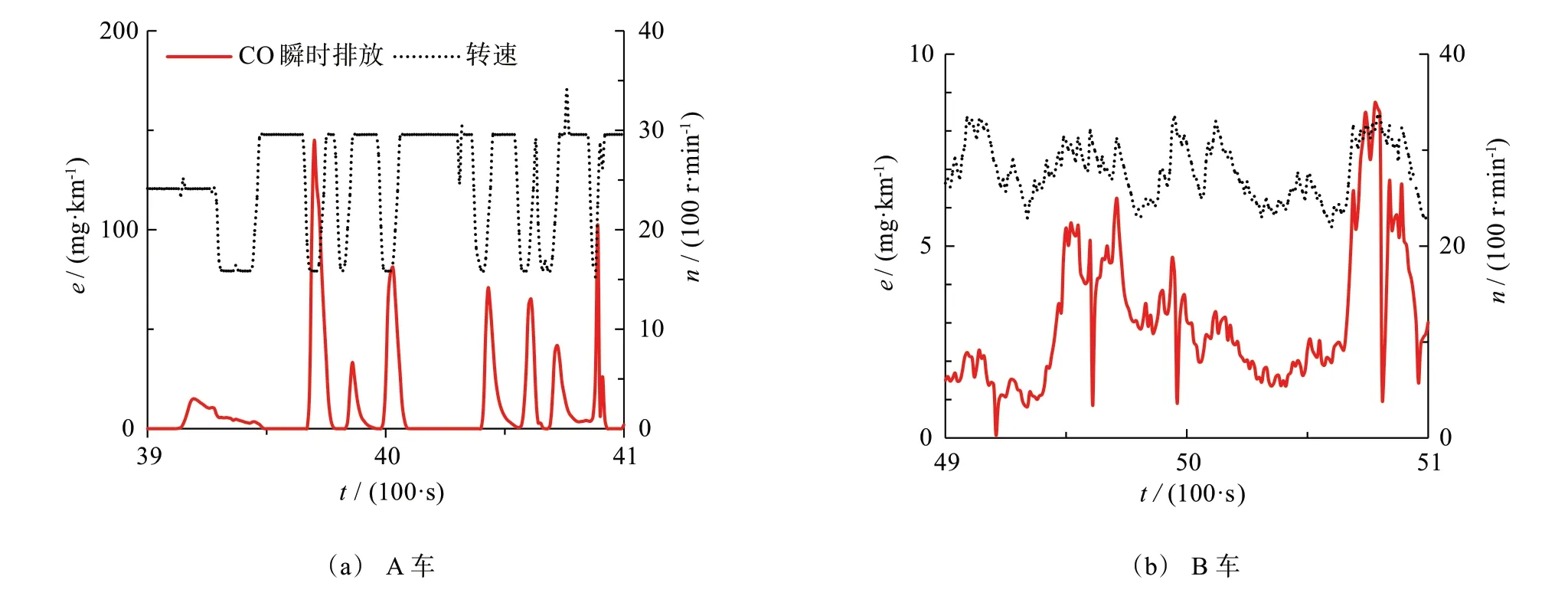
图2 正常工况下2车CO瞬时排放、发动机转速与时间的关系

表5 A车CO各HES以及总行程的发动机转速变化率分布
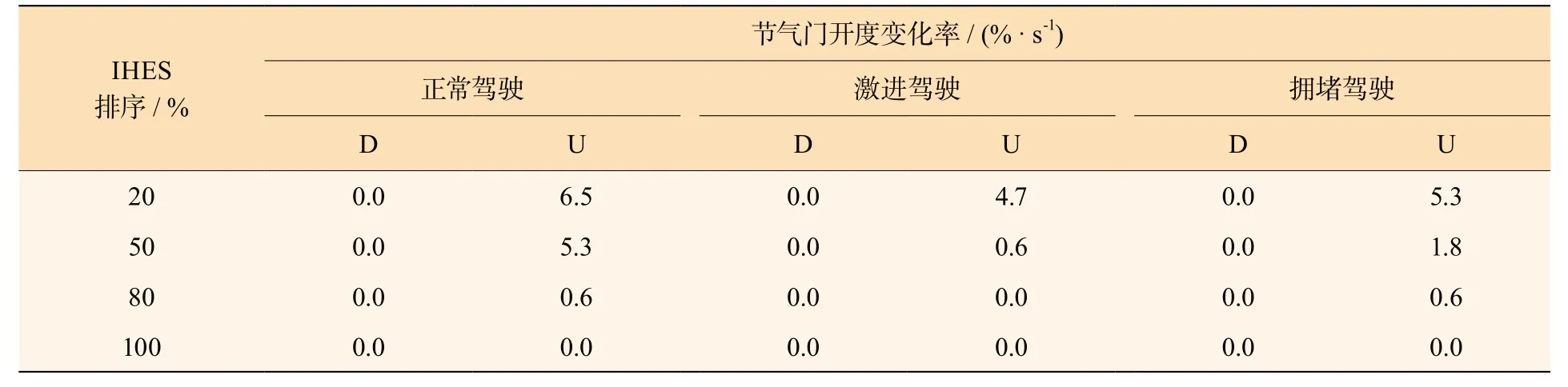
表6 A车CO各HES以及总行程的节气门开度变化率分布
图3为A、B车正常工况下CO各HES以及总行程的车速频次分布图,左纵坐标为各瞬时高排放集合中同一速度出现的频次(fre),右纵坐标为总行程集合(CO_HES100)中同一速度出现的频次[fre(CO_HES100)]。
由图3可看出,A车CO的最高瞬排集合HES20多集中于100 km/h附近的区域,即高速阶段。而B车CO的HES20多集中于0 km/h附近的区域,即车辆刚起步阶段。激进工况与拥堵驾驶工况下,瞬时高排放集合的车速频次分布与正常工况一致,即工况的变化并没有导致CO瞬时高排放的速度频次分布发生明显改变,说明CO瞬时高排放分布不受驾驶工况的影响,这是由增程式电动汽车的技术特点决定的。
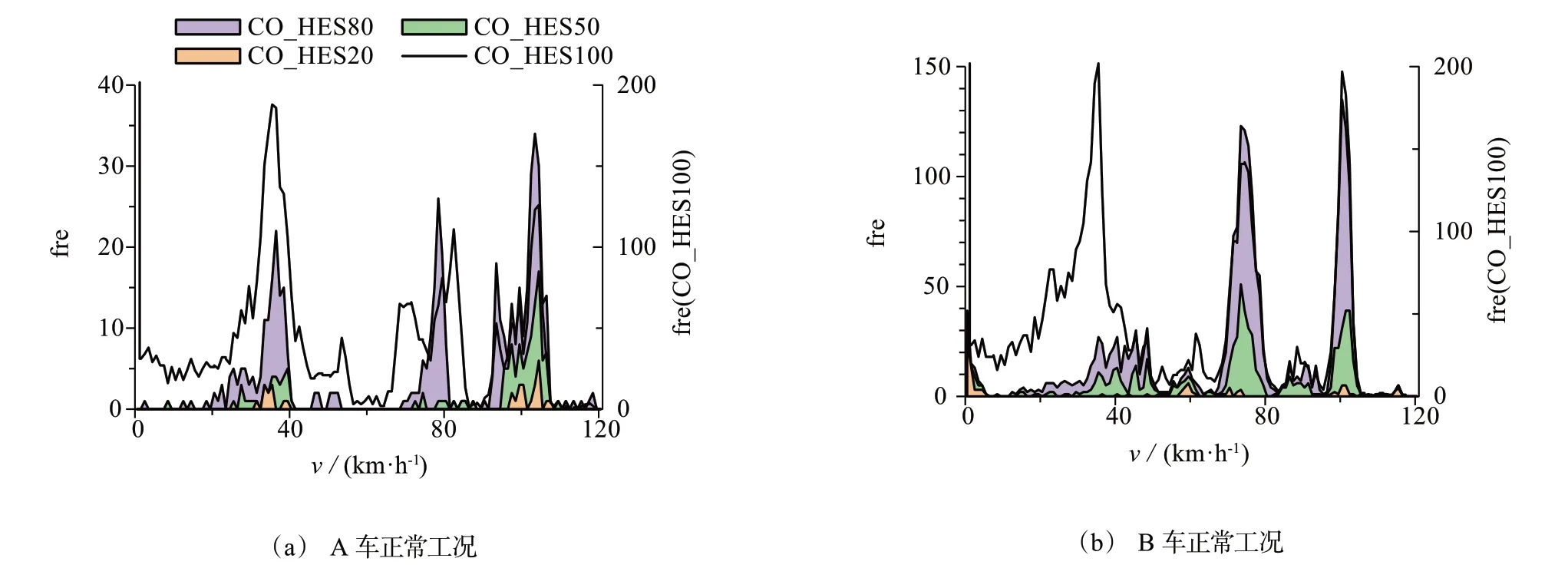
图3 CO各HES以及总行程(CO_HES100)的车速-频次分布
3.3 PN原始瞬时排放及排放量
图4为数值平均法计算得到的A、B 2车PN总行程排放量。2车在激进工况都会增加PN排放,A车在拥堵路况下明显产生了更多的PN排放,达到了4.91×1011/km。B车由于装配了GPF,所以整体的排放量较低,但是B车3个不同驾驶工况的试验均在高速阶段有较多的浓度相对高的PN瞬时排放产生。
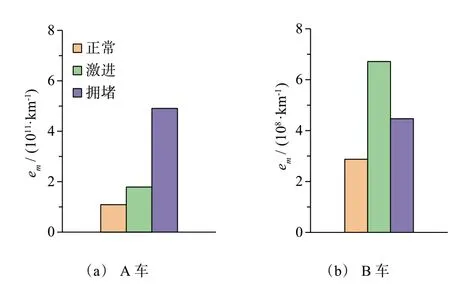
图4 2车PN总行程排放量分布
3.4 PN瞬时高排放影响因素分析
表7为B车PN各HES以及总行程的排气流量分布,HES20对应了更大的排气流量。
此外HES20也对应了更大的转速与节气门开度,激进驾驶与拥堵路况驾驶的节气门开度均处于最大开度。PN的瞬时排放随着转速、负荷的上升而上升,同时负荷和转速的上升也引起了排气流量即空速的上升。各工况下HES20对应了更高的排气流量,这是因为高速阶段,发动机转速、负荷升高引起了排气流量的上升,随着排气流量的上升PN瞬时排放增加。这与尹乾熙[12]针对一台缸内直喷汽油机的台架试验获得的结论一致。
图5为PN各HES以及总行程的车速频次分布图。由图5可看出:A车PN最高瞬排集合HES20集中于40 km/h以下,这对应于车辆各启动阶段。市区阶段的拥堵路况会存在更多的低速行驶,大部分时间由动力电池提供需求功率,所以发动机停机时间更久,再启动时发动机缸内温度相对较低,混合气更易偏浓,产生了更高的PN瞬时排放。而不同工况未对B车瞬时高排放集合的车速频次分布产生明显影响。
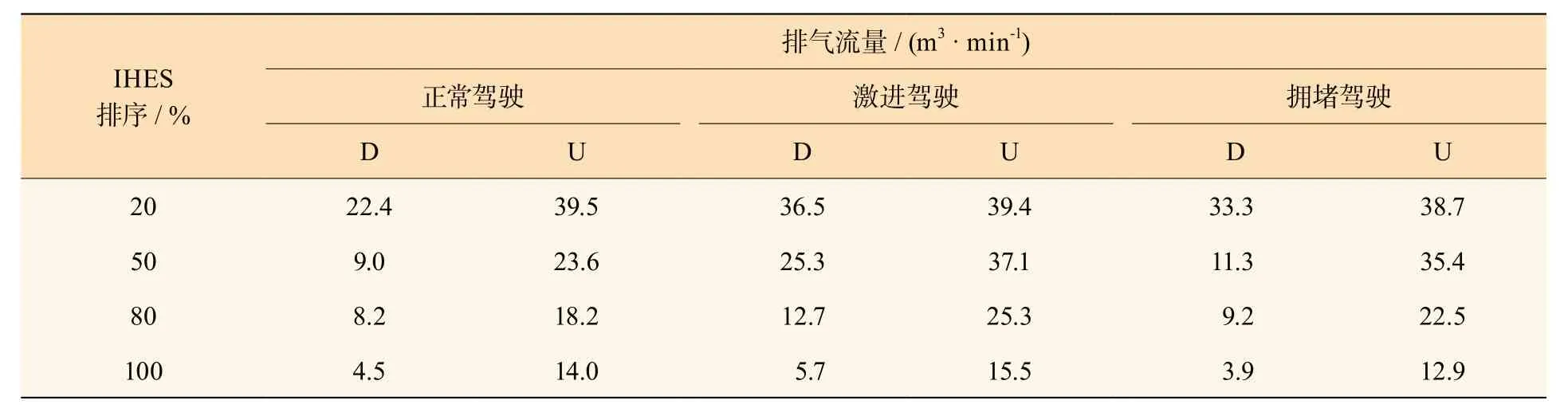
表7 B车PN各HES以及总行程的排气流量分布
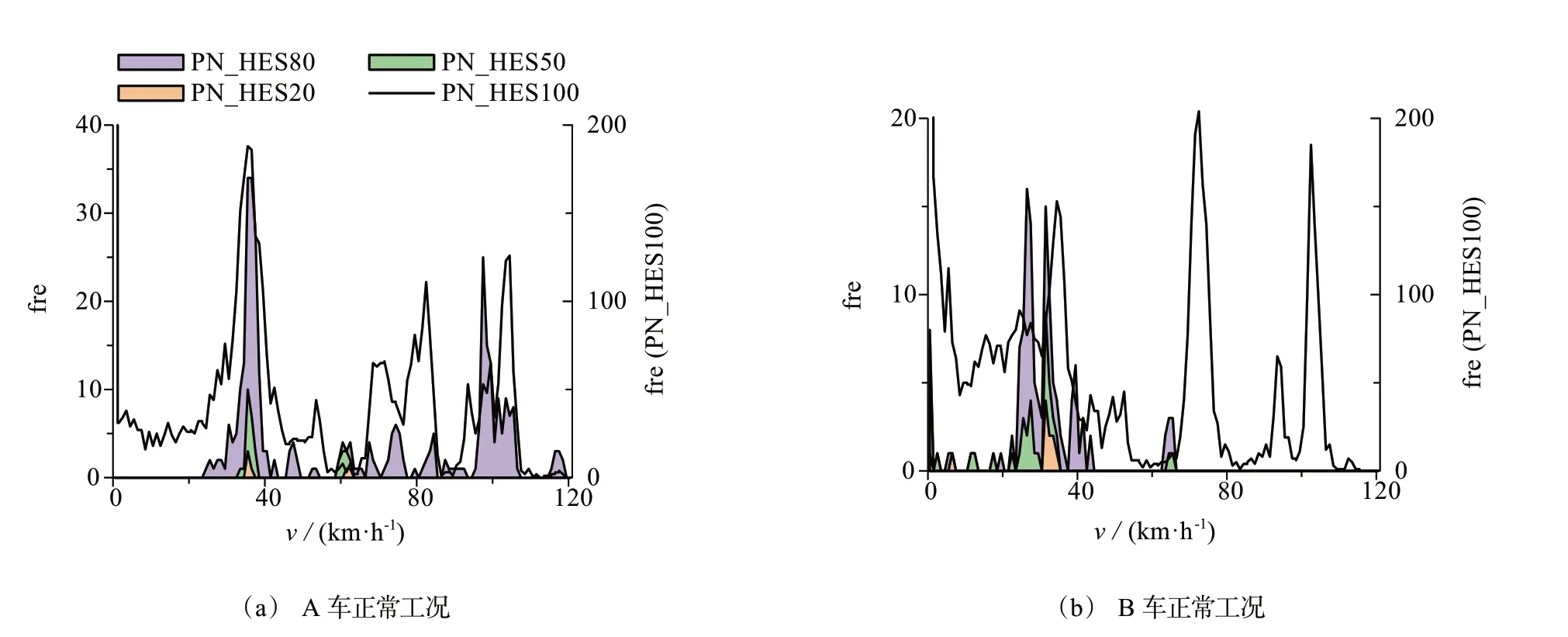
图5 PN各HES以及总行程(PN_HES100)的车速-频次分布
4 结 论
本文对2辆分别为多点控制策略和功率跟随策略的增程式电动汽车在正常、激进、拥堵驾驶工况下进行了实际道路排放试验。基于试验结果,得到了以下结论:
1) 不同的能量管理策略会导致CO的瞬时高排放规律存在明显差异。A车采用多点控制策略,转速、负荷变化相对激烈,这会导致空燃比控制产生偏差,偏离理论空燃比,CO瞬时排放增加。而B车采用功率跟随策略,转速、负荷变化相对缓和,排放控制效果好。
2) 驾驶行为不是影响增程式电动汽车CO、PN排放的主要影响因素。这是因为增程式电动汽车的发动机与车辆运动状态之间是相对解耦的。
3) 拥堵路况会导致A车发动机停机时间更久,使得发动机缸内温度相对低,再启动时混合气加浓,产生了更高的PN排放。
参考文献 (References)
[1] 闵海涛, 叶冬金, 于远彬. 增程式电动汽车控制策略的优化[J]. 汽车工程, 2014, 36(8): 899-903.
MIN Haitao, YE Dongjin, YU Yuanbin. Optimization of the control strategy for range extended electric vehicle [J].Auto Engi, 2014, 36(8): 899-903. (in Chinese)
[2] 刘成祺, 解来卿, 樊月珍, 等. 某增程式电动汽车北方冬季工况下能耗测试与分析 [J]. 汽车技术, 2016 (2): 45-49.
LIU Chengqi, XIE Laiqing, FAN Yuezhen, et al. Test and Analysis on Energy Consumption of A Rang Extended Electric Vehicle in Winter of Northern China [J].Auto Tech, 2016 (2): 45-49. (in Chinese)
[3] Lijewski P, Kozak M, Fuć P, et al. Exhaust emissions generated under actual operating conditions from a hybrid vehicle and an electric one f itted with a range extender [J].Transp Res Part D: Transp Envir, 2020, 78: 102183.
[4] Saeed M, Andersson L. Real driving emissions (RDE) of a gasoline PHEV [D]. Goteborg: Chalmers University of Technology, 2018.
[5] 张运. 道路坡度与交通状况对轻型汽油车实际行驶排放的影响[D]. 重庆: 重庆大学, 2019.
ZHANG Yun. Impact of road grade and traff ic condition on real driving emission of light-duty gasoline vehicles [D]. Chongqing: Chongqing University, 2019. (in Chinese)
[6] Mera Z, Fonseca N, López J M, et al. Analysis of the high instantaneous NOx emissions from Euro 6 diesel passenger cars under real driving conditions [J].Appl Energy, 2019, 242: 1074-1089.
[7] WANG Yachao, WANG Junfang, HAO Chunxiao, et al. Characteristics of instantaneous particle number (PN) emissions from hybrid electric vehicles under the realworld driving conditions [J].Fuel, 2021, 286, 119466.
[8] 中华人民共和国环境保护部, 国家质量监督检验检疫总局. 轻型汽车污染物排放限值及测量方法(中国第六阶段): GB 18352.6-2016 [S]. 北京: 中国标准出版社, 2 016.
Ministry of Environmental Protection of the People’s Republic of China, General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China. Limits and measurement methods for emissions from light-duty vehicles (China 6): GB 18352.6-2016 [S]. Beijing: China Standard Press, 2016. (in Chinese)
[9] 沈望胜. 基于出行特征的增程式电动汽车能量管理策略研究[D]. 长春: 吉林大学, 2020.
SHEN Wangsheng. Research on energy management strategy of extended-range electric vehicle based on trip characteristics [D]. Changchun: Jilin University, 2020. (in Chinese)
[10] Merkisz J, Pielecha J, Jasiński R. Remarks about real driving emissions tests for passenger cars [J]. Archives of Transport, 2016, 39: 51-63.
[11] 毛德智. 基于改进PID与模糊算法的汽油机瞬态空燃比复合控制方法研究[D].长沙: 长沙理工大学, 2017.
MAO Dezhi. Study on compound control method of gasoline engine transient air fuel ratio based on improved PID and fuzzy algorithm [D]. Changsha: Changsha University of Science & Technology, 2017. (in Chinese)
[12] 尹乾熙. 缸内直喷汽油机微粒捕集器捕集特性研究[D]. 长春:吉林大学, 2015.
YIN Qianxi. Research on the trap characteristics of gasoline particulate f ilers [D]. Changchun: Jilin University, 2015. (in Chinese)
猜你喜欢
汽车工程师(2021年11期)2021-12-21
北京第二外国语学院学报(2021年2期)2021-08-13
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
防爆电机(2021年1期)2021-03-29
发电技术(2020年3期)2020-06-29
汽车维护与修理(2019年3期)2019-08-08
戏剧之家(2018年21期)2018-10-19
汽车维护与修理(2018年19期)2018-04-28
汽车维修与保养(2015年1期)2015-04-17