
Colpitts混沌电路的线性反馈控制及自适应反馈控制
2021-07-02 01:13张中华周健博付景超
东北电力大学学报 2021年2期
张中华,周健博,付景超
(东北电力大学理学院,吉林 吉林 132012)
自洛伦兹提出第一个混沌模型[1]以来,人们对于混沌系统的研究取得了飞速发展,其中混沌系统的研究方向也出现了分支:量子混沌[2-5]、混沌耦合与同步[6-9]、混沌吸引子[10-13]、混沌控制[14-16]等.1983年,蔡少棠教授提出了一种简单的非线性电子电路设计,即著名的蔡氏电路[17].1994年,爱尔兰学者Kennedy教授首次发现了Colpitts电路可以在工作时产生混沌振荡[18],此后Colpitts混沌电路[19]逐渐被人们关注,并成为一个研究热点.近些年来,已有许多学者对于Colpitts混沌电路的动力学行为进行了深入的研究[20-21].研究表明Colpitts振荡电路在许多领域都有广阔的应用前景,最显著的就是微波频段混沌信号发生器.由于Colpitts混沌电路产生的混沌信号带宽更宽、频率更高,因而更符合超宽带通信与混沌雷达等应用领域的需要[22].同时,对于Colpitts混沌电路的控制方法[23-24]的研究也开始变得引人瞩目.本文通过数值仿真对Colpitts混沌系统[25]的混沌现象的进行了验证,并设计了线性反馈控制器和自适应反馈控制器稳定Colpitts混沌系统,仿真证实了两种反馈控制的有效性.
1 Colpitts振荡电路的动力学分析
典型的Colpitts振荡电路[25]如图1所示.其中,三极管作为电路中唯一的非线性器件,是电路产生混沌振荡的核心.
Colpitts振荡电路无量纲后的数学模型为
(1)
公式中:η(y)=exp(-y)-1是唯一的非线性项.
引理1[25]该混沌电路有且只有一个平衡点S0=(0,0,0),且该平衡点当k=0.5,Q=1.4158,g=3.162 3时,Colpitts振荡电路会产生混沌振荡.
系统的混沌吸引子如图2所示;系统状态变量随时间变化的时域波形图如图3所示.
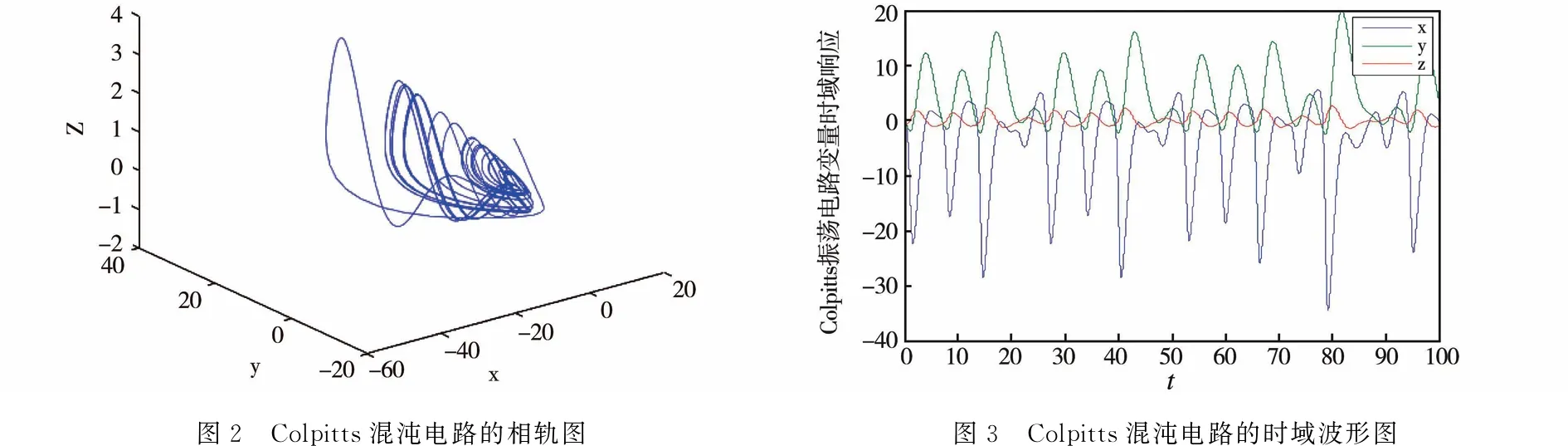
图2 Colpitts混沌电路的相轨图图3 Colpitts混沌电路的时域波形图

(2)
2 Colpitts混沌电路的线性反馈和自适应反馈控制
2.1 线性反馈控制
2.1.1 线性反馈控制器
受控系统(3)如下所示,
(3)
这里U=(u1,u2,u3)T为要设计的控制器.令U=(u1,u2,u3)T=(0,βy1,0)T,其中β是反馈系数.系统(3)变为
(4)
系统(4)在S0(0,0,0)的雅可比矩阵为

特征方程为
Δ(λ)=λ3+A1λ2+A2λ+A3,
A1=d-β,A2=-βd+ac+bc,A3=abc-βac
根据Routh-Hurwitz判据,当
受控系统(3)在平衡点S0(0,0,0)处渐进稳定.

目前,人力资源管理信息化软件产品的规则与质量,在社会市场上的标准还不统一,产品还不规范,销售厂商较为混杂,这些问题都在一定程度上制约着人力资源管理的信息化发展。
2.1.2 数值仿真
k=0.5,Q=1.4158,g=3.1623,取反馈系数β=-1和β=-1.5,受控Colpitts混沌系统的时域波形如图4、图5所示.

图4 β=-1时受控Colpitts混沌系统的时域波形图图5 β=-1.5时受控Colpitts混沌系统的时域波形图
2.2 Colpitts混沌电路的自适应反馈控制
2.2.1 自适应反馈控制器
当k=0.5,Q=1.415 8,g=3.162 3时,受控混沌系统(3)如下
(4)
设控制目标为α1=0,α2=C1e1,α3=C2e1+C3e2,控制误差为e1=x-α1,e2=y-α2,e3=z-α3.将控制误差带入受控系统,可得如下的误差系统
令
u3=cx+(c+dC3)y,

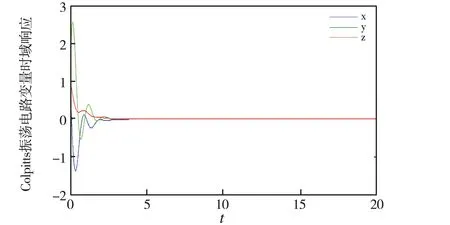
图6 受控Colpitts混沌系统的时域波形图

2.2.2 数值仿真
令k=0.5,Q=1.415 8,g=3.162 3,受控Colpitts混沌系统如图6所示,此处C1=0.97,C2=-0.97,C3=-1.
3 结 论
文章研究了Colpitts混沌电路的控制问题.分别设计了线性反馈控制器和自适应反馈控制器,数值仿真验证了两种控制器均可以将混沌系统控制到平衡点,且自适应控制的效果明显好于线性反馈控制的效果.
猜你喜欢
电声技术(2022年7期)2022-09-23
中北大学学报(自然科学版)(2022年4期)2022-09-23
吉首大学学报(自然科学版)(2022年1期)2022-08-11
吉首大学学报(自然科学版)(2022年1期)2022-08-10
花火彩版B(2020年5期)2020-09-10
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
读与写·教育教学版(2019年9期)2019-10-30
教育教学论坛(2019年27期)2019-07-30
卷宗(2018年14期)2018-06-29
