六足排爆机器人的机构设计与运动分析
2021-06-30 06:47:26于正林隋天然胡作勇段学鹏
长春理工大学学报(自然科学版) 2021年3期
于正林,隋天然,胡作勇,段学鹏
(长春理工大学 机电工程学院,长春 130022)
排爆机器人是排爆人员用于处置爆炸可疑物的专用器材,可以避免不必要的人员伤亡[1]。人们希望排爆机器人可以用于多种复杂地形进行排爆,它的操作手可以处理排爆工作,或代替排爆人员搬运可疑物品转移到安全地区。
目前按照行进方式,排爆物机器人分为轮式履带式,或两者相结合[2]。排爆机器人的工作环境大多地形不规则或崎岖不平,而足式机器人因具有丰富的步态,运动灵活、承载能力强和稳定性好等优点在排险领域有着广阔的应用前景[3]。本文考虑到足式机器人的各种优越性,把排爆机器人承载机构设计成六足机器人,根据各个关节和部件的空间位置,建立六足排爆机器人模型。然后基于SimMechanics在仿真软件MATLAB中仿真。使用D-H矩阵法建立了运动学方程,在MATLAB中验证设计的合理性。对于排爆机器人复杂的工作情况,设计两种足端轨迹应对平坦和崎岖的地面情况,把足端轨迹代入到机械模型中,实现了整机的仿真。
1 排爆机器人结构设计
1.1 六足排爆机器人的整体结构设计
排爆机器人运动机构在工作状态下应具有承载能力好、稳定性好、机动性强的特点,且在复杂地形状态下运动功能良好[4]。如图1所示,设计的六足排爆机器人主要由腿部,控制中心和操作手组成。执行机构需要满足全方位空间操作要求,并安装视觉系统,和排爆工作的操作手等装置。在复杂周边情况下工作的排爆机器人,采用机械视觉和多传感器信息融合的方式规划行驶路线。除了腿部上的避障传感器外,还有控制箱上安装摄像头,能够全方位的采集周围的外部信息来规划行驶路径和对操作手的操控。在控制箱有一个三自由度的操作手,用来处理防爆工作。爪上带有小型摄像头,激光测距传感器,力敏传感器,红外测距传感器相互配合共同完成排爆工作。

图1 排爆机器人整体机构
1.2 六足排爆机器人机械腿的结构方案
六足机器人的腿部机械结构是仿照六足纲昆虫的腿部结构设计的,六条腿采用正对称分布在躯体两侧,从而减少行进过程中腿部之间的干涉,使机器人行进过程的平稳性得到进一步提高。根据六足纲昆虫腿部结构,设计三个关节,如图2所示。根关节把六足机器人的机身和腿部相连,负责完成腿部摆腿动作。与根关节不同,髋关节、膝关节的电机转动方向垂直于腿部,从而达到腿部的位姿调整。在传输扭矩的选择上,由于十字万向节拥有较为精良的传送能力,选取十字万向节输出扭矩更有利于整体机构时刻处于运转良好状态。
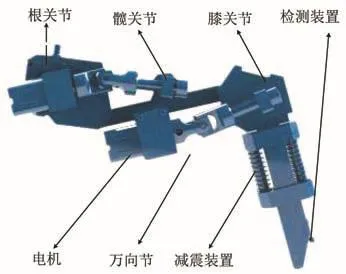
图2 腿部机构图
六足机器人脚部结构处增设一个红外检测模块,使机器人在行进过程中,可以实时检测腿部到地面的距离,根据距离找到良好的腿部落脚点。当其中某一条腿部检测不到信号的时候,证明该腿部相对于机器人本体的方位上存在一个比较大的高度差,此时该机器人会自动停止运动,并退后重新规划路线。足端红外检测装置和视觉系统共同完成足端落点的规划,避免机器人在工作中由于地势落差较大和关节碰撞而造成机器人损坏。对于不同的地面情况,足端安装减震装置来应对地面的不平整性,使之避免结构损伤和电机堵转造成的电机损坏。从排爆机器人自身质量、构件强度以及负载能力的角度出发,腿部结构材料采用铝合金,在满足构建强度的情况下,减轻整体质量,提高了承载能力。
2 排爆机器人轨迹规划
2.1 机器人运动学分析
为了进行足端轨迹规划的研究,需要通过对承载机构建立运动学方程。排爆机器人行进过程中根据腿部姿态的不同分为摆动腿和支撑腿,摆动腿通过运动学确定足端与接触点的位置,建立摆动腿运动学正逆方程,使摆动腿足部末端准确到达规划运动轨迹的相应位置。
如图3所示,∑C为固定在机器人质心上的机体坐标系,用来描绘机体在空间的初始位置和方向。Z坐标轴始终垂直于机体方向,Y坐标轴始终沿着躯干指向行进方向。∑1、∑2、∑3分别为根关节坐标系、髋关节坐标系、膝关节坐标系,用来描绘各个关节转动状态。∑4为足端的坐标系,用来描绘足端的位置、形态和落点。
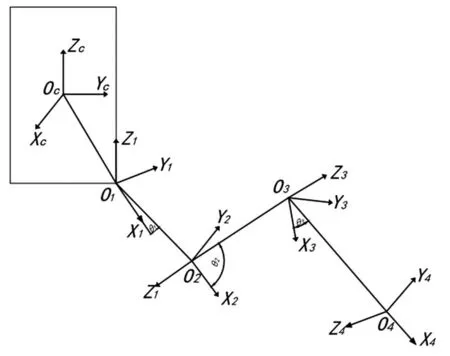
图3 六足机器人运动学连杆坐标系
表中θi为关节转角;αi为关节夹角;li为连杆长度;di为相邻关节公垂线距离。
根据D-H参数法的坐标变换矩阵,得到连杆n到连杆n+1的转换矩阵公式为:
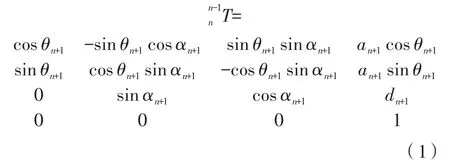
式中,a为两z轴的距离;n为连杆的序号。
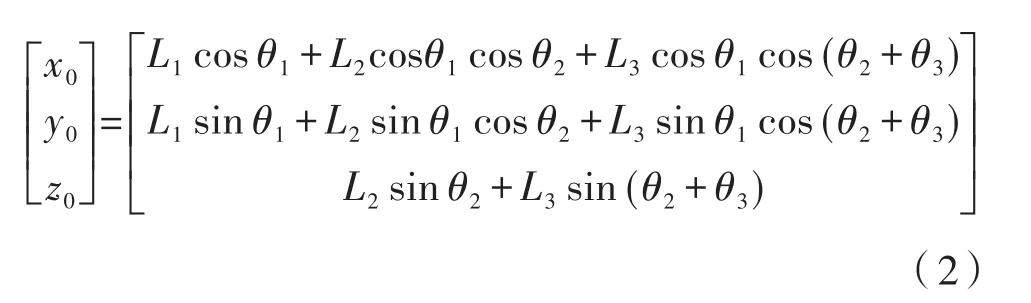
将表1中的参数带入转换矩阵,就得到了由机器人步行足坐标系的转换矩阵,也就是对于排爆机器人的正解,得到足端在∑1坐标系的坐标为:
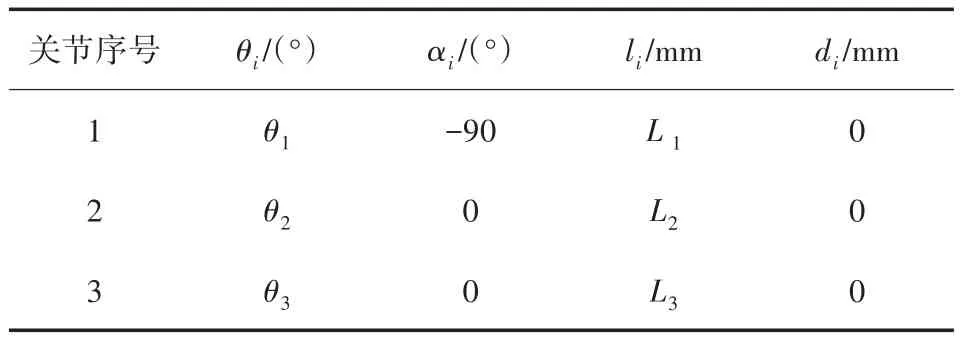
表1 机械人腿部D-H参数表
通过正运动学分析可得足端位置在坐标系的位置,而实际上机器人往往通过对足端点对机器人整体位姿调整。对于腿部机构即需要通过足端坐标反求三个关节转角,也就是需要运动学逆解。
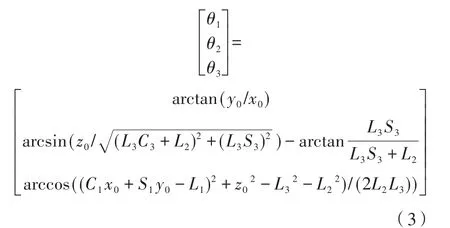
求得运动学逆解后,把求解得出的根关节θ1、髋关节θ2、膝关节θ3作为输入信号输入到排爆机器人仿真模型中,驱动机器人行进,通过仿真得出各个关节转角状态,验证机构合理性。
2.2 足端轨迹规划
六足机器人的运动状态取决于足端轨迹规划,而足端轨迹规划重点在于摆动足端从抬起点到落脚点路线的规划[5]。所以足端轨迹的合理性直接影响着排爆机器人的越障能力、能耗大小和整机稳定性。本次重点考虑相对平整和有明显的凸起的两种地形,并针对规划两种运动轨迹。
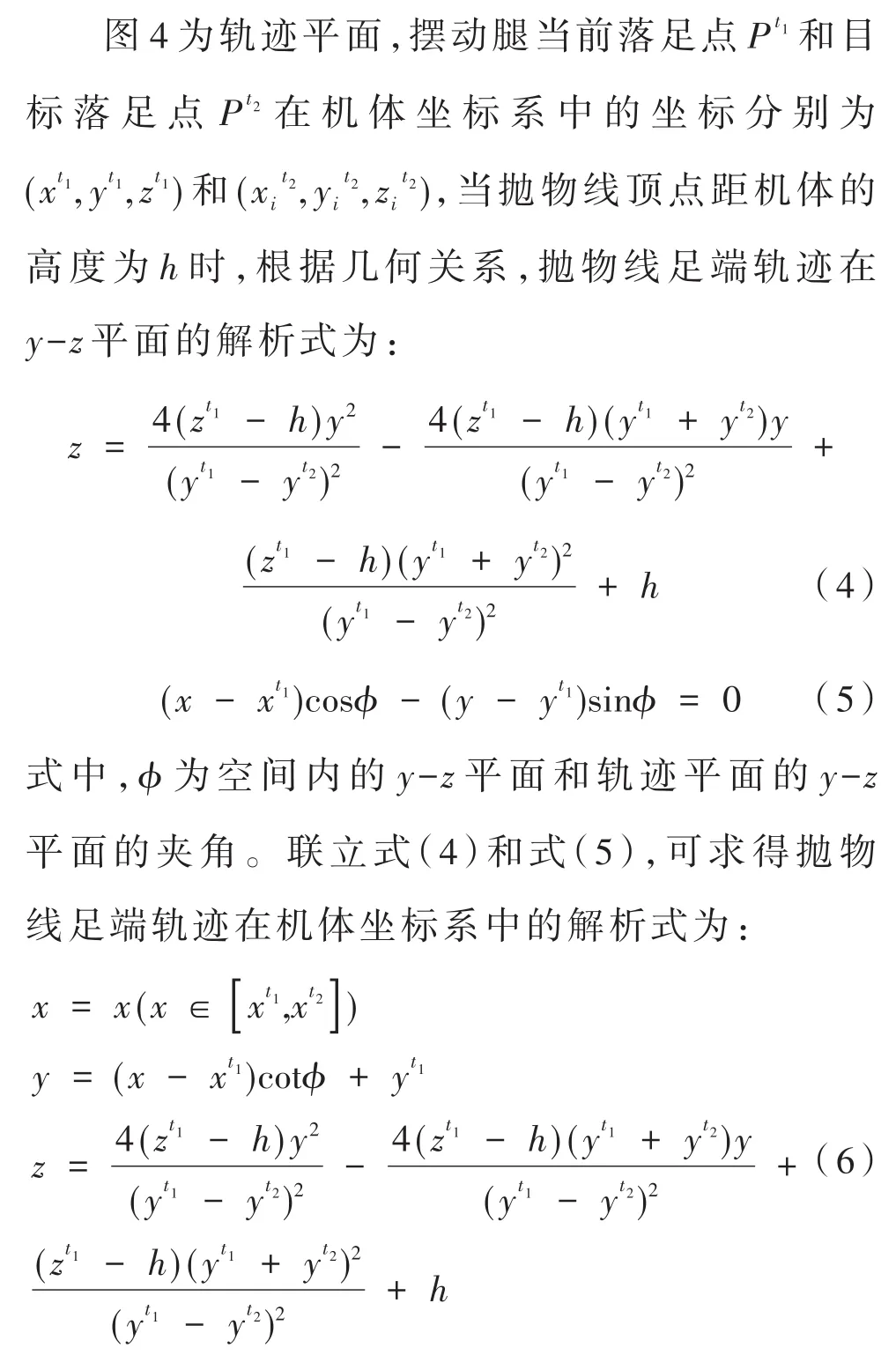
2.2.1 抛物线足端轨迹
抛物线足端轨迹具有易变化的特点,和其它常见曲线相比,有着计算效率高、能耗低的特点[6]。因此在地形相对平坦时,为提高行进速度,可选用抛物线足端轨迹。
在地面上方假想一个平面,这个假想平面到地面的区域为缓冲区,这个区域为足端的预抬阶段和下放阶段,足端需要匀加速抬起和匀减速下放,这个时间需要稳定减速运行。在缓冲区上方为了提高机器人的移动速度,高效行驶的运动轨迹,抛物线如图4所示。
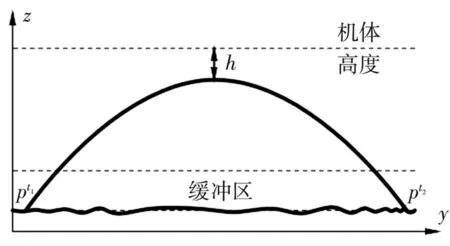
图4 抛物线足端轨迹
2.2.2 复合足端轨迹
应对于崎岖路面,在足端抬起阶段和下放阶段选取直线轨迹,抬起高度和下放高度超出缓冲区,根据地面崎岖情况可自由设定抬起角和落地角,在上端选取抛物线轨迹快速跨过障碍物[7]。故规划了一条直线、抛物线相结合的复合足端轨迹。虽然直线和抛物线结合点处的速度不连续,但对于凸起地形有着良好的通过性。因此,跨越障碍物时,为提高跨越能力,可选用直线、抛物线结合足端轨迹。
图5为轨迹平面图,机体高度平面为z=0平面,α为足端起始位置抬起角,β为足端结束落地角,m为抬起时抛物线轨迹起点,n为下落时抛物线终点。通过设定平面足端机体坐标系中距离α,β,hm,hn,h这 5个参数即可得到机器人的足端轨迹。
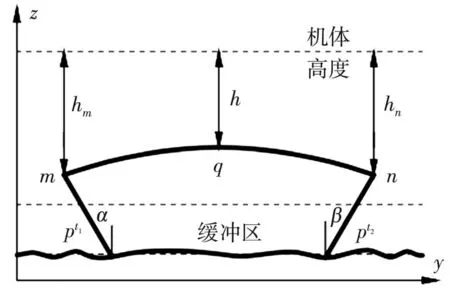
图5 复合足端轨迹
nPt1段直线解析式为:
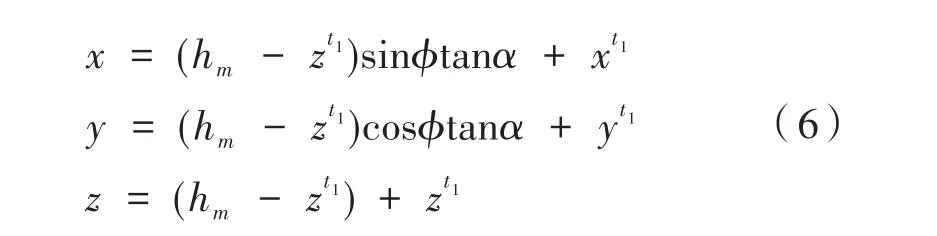
式中,α为足端起始运动抬起角。
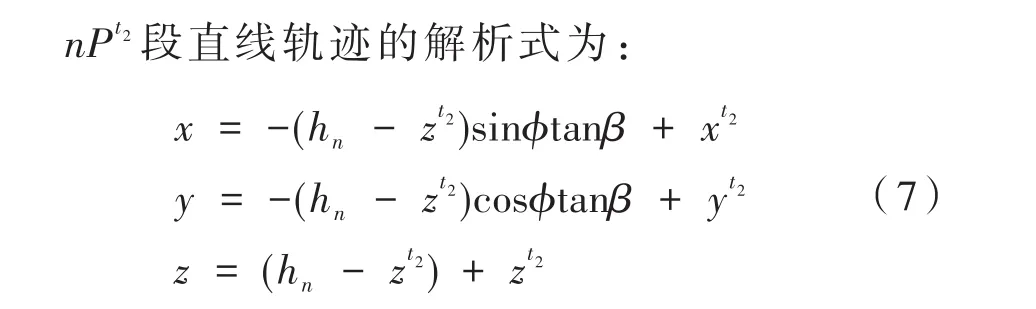
式中,β为足端结束运动落地角。
同上文的计算方法一样,mn段抛物线轨迹的解析式为:
将所得的足端轨迹在机体坐标系中的解析式带入到运动学逆解,即可得到机器人在执行工作过程中各个关节的转角变化情况。
3 仿真分析
3.1 仿真模型的建立
为验证上述的轨迹规划并校验各关节的运动状况,需对排爆机器人进行仿真,仿真采用SimMechanics模块。SimMechanics是Simulink的子模块,它为三维系统建模提供了模块库,很好的用库里的模块组合打包成定义了几何结构、质量和惯量的零件,而且提供3D视图,方便模型的查看。这大大减少了构件模型的工作量和出错率。只需要将这些部件模块用线连接,设置各个模块的属性和坐标系,就可以得到完整的机械仿真系统模型,如图6所示。由世界坐标系、解析函数和重力系统相组合,为后期导入驱动函数做准备。

图6 整体模型图
整个机器人模型有22个自由度,其中4个自由度组成了承载系统上部的机械臂执行结构。如图7所示,第一个自由度连接到控制中心上,负责机械臂可以绕基座旋转运动。其他三个转动关节用来调整末端执行器的位姿。
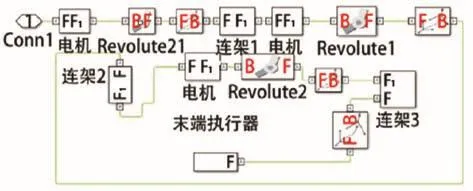
图7 执行机构模型图
其他18个自由度分配到6条腿,以一条腿为例,机械模型如图8所示。
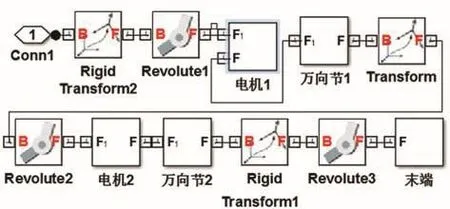
图8 腿部机构模型图
3.2 轨迹规划验证
对两种路况情况设计的两种轨迹进行仿真,验证运动状态下的平稳性,各个关节状态是否运转良好。
3.2.1 平整路面
排爆机器人需要在相对平整路段快速行进,所以对于较为平整的路面(地面不平整度<2 cm),采用抛物线足端轨迹。根据地面不平整度设定机体高度到足端轨迹最高点的距离h。根据h,足端轨迹出发点和落脚点就可以得到一条足端抛物线轨迹。
仿真结果如图9所示,图中曲线轨迹就是足端在一个步幅下运动的轨迹。整个运动轨迹光滑无畸变,没有体积碰撞,运转状态良好。
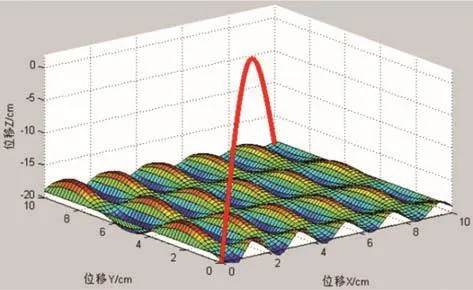
图9 平整路段足端轨迹图
仿真结果如图10所示,可知在一个步幅内,摆动腿三个关节的位置状况,根关节的运动范围在 0°~20°,髋关节运动范围在-20°~30°,膝关节运动范围范围-120°~-60°,摆动腿转动关节状态也无明显畸变,符合步态规范要求。仿真结果如图11所示,可知在一个步幅下,重心位置跳动在20 mm内,整体上基本光滑运动平稳。所以在相对平整的路面上,采用抛物线足端轨迹,设定h大小就可以规划一条稳定合理的抛物线,且状态稳定良好。
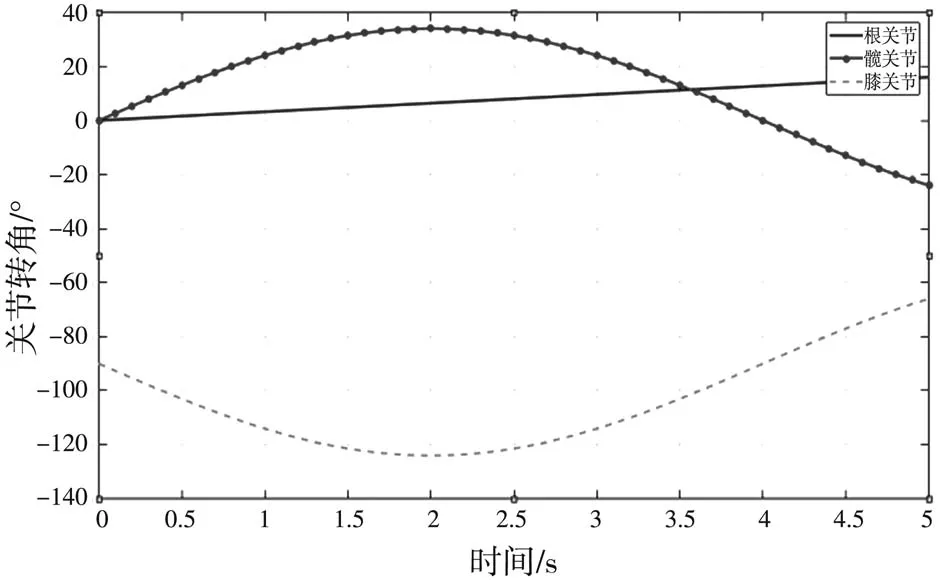
图10 平面路段关节转角图
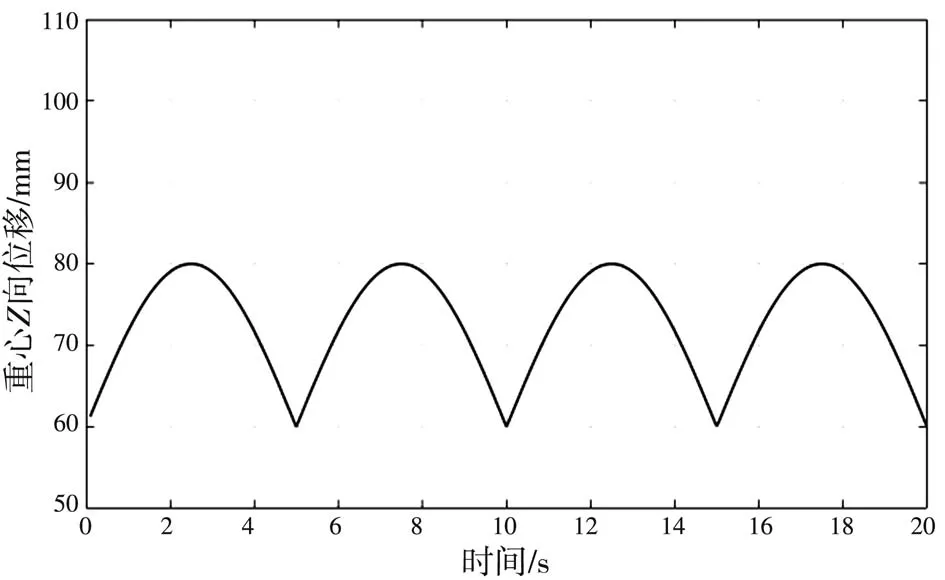
图11 平整路段重心变化图
3.2.2 崎岖路面
排爆机器人在工作过程中需要应对障碍物问题,故需要机器人有一定的越障能力。在本次仿真实验中,选取10 cm左右的凸起来模拟不平整的路面。根据传感器和机械视觉所获得的信息,经过控制中心处理确定φ,α,β,hm,hn,h这6个参数得到规划复合足端轨迹的所有信息。
仿真结果如图12所示,图中曲线轨迹就是足端在一个步幅下运动的轨迹,整个运动轨迹和突出有明显的距离,整体轨迹光滑无突变。
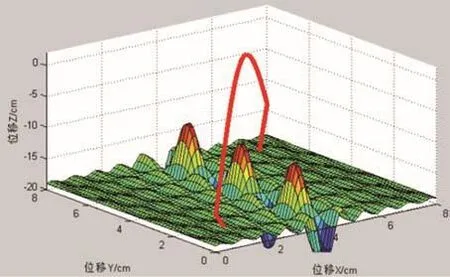
图12 崎岖路段足端轨迹图
仿真结果如图13所示,得到在一个步幅内,摆动腿三个关节的位置状况,根关节的运动范围在-40°~0°,髋关节运动范围在 0°~10°,膝关节运动范围范围-90°~-80°,摆动腿转动关节状态也无明显畸变,符合步态规范要求。根据图14表明,和相对平整的路面相比,重心在Z向跳动有所增加,但仍然比较稳定。所以对于崎岖地面或有明显突起的障碍物的时候,采用复合足端轨迹可良好的在崎岖地形上运转,有跨越10 cm的障碍物能力。
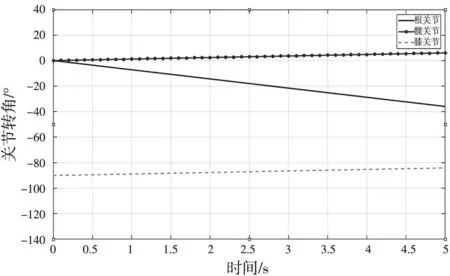
图13 崎岖路段关节转角图
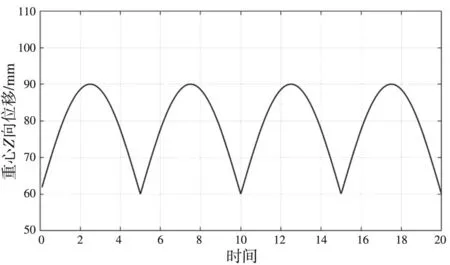
图14 崎岖路段重心变化图
4 结论
根据六足纲昆虫的腿部结构,针对复杂地形环境下的排爆工作,根据六足机器人良好的越障能力,设计了一款承载机构为六足机器人的排爆机器人。针对相对平整和相对崎岖的两种路况,为排爆机器人设计了抛物线足端轨迹和直线-抛物线足端轨迹这两种轨迹。使用MATLAB建立排爆机器人机械模型,根据所计算的预设的足端轨迹带入到机械模型中。根据实验所得,在相对平整路面上排爆机器人整体机构运行平稳,说明该排爆机器人运动机构设计和足端轨迹是合理的。对于崎岖的地面情况,根据仿真结果,所设计的模型可以有效地跨越10 cm左右的障碍物,且在运动过程中各个关节运转稳定,整体运行平稳。为接下来的理论研究工作打下基础。
猜你喜欢
现代机械(2022年3期)2022-07-11 12:46:20
玩具世界(2022年2期)2022-06-15 07:35:58
计算机测量与控制(2021年11期)2021-12-01 07:41:24
装备制造技术(2020年9期)2021-01-26 00:14:46
河北省科学院学报(2020年1期)2020-05-25 06:57:18
装甲兵工程学院学报(2019年1期)2019-05-23 06:16:48
制造技术与机床(2018年11期)2018-11-23 01:07:50
恋爱婚姻家庭(2015年27期)2015-12-19 00:54:49
海军航空大学学报(2015年1期)2015-11-11 17:18:37
恋爱婚姻家庭·养生版(2015年9期)2015-05-14 17:38:26