IVS分析中心EOP产品及精度评估*
2021-05-31 05:46马卓希秦文振
天文学报 2021年3期
马卓希 秦文振 于 亮 李 军
(1西安测绘总站西安710054)
(2西安航天宏图信息技术有限公司西安710054)
1 引言
地球定向参数(Earth Orientation Parameters,EOP)是实现天球参考架和地球参考架之间相互转换的参数,用于描述地球自转轴及其指向的变化.这些参数包括2个极移参数、世界时(Universal Time,UT1)与协调世界时(Coordinated Universal Time,UTC)之差(UT1-UTC)和2个章动改正参数.其中,章动改正参数结合岁差反映了地球瞬时自转极相对天极指向的不规律性,而极移和UT1-UTC参数反映了地球本身自转的不规律性[1].EOP参数是实现航天器高精度空间定位与导航的基础.研究表明,对地观测的低轨卫星对精密轨道的需求约5–10 cm,对应EOP的误差小于1.5 mas;中、高卫星的定轨精度要求为1 m,对应EOP的误差小于8 mas.为了保证卫星系统的精准测控,一般需要高精度的EOP预报结果.以北斗卫星导航系统为例,一般需要上行未来3 d的EOP预报结果.由于EOP的预报精度随时间而逐渐恶化,预报1 d的UT1-UTC和极移分量的精度分别衰减约0.18 ms和0.4 mas[2].因此,只有利用快速、高精度的EOP解算值作为控制参数,才能尽可能地降低EOP预报随时间变化的衰减.
甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)作为目前唯一可提供准惯性参考系的技术,不受动力学因素影响,能够直接测定坐标系指向绝对值,建立与惯性坐标系的直接关联,是唯一可以解算全部EOP参数并监测UT1-UTC变化的空间大地测量技术[3–4].
国际测地/天体测量学VLBI服务(International VLBI Service for Geodesy and Astrometry,IVS)自上世纪末成立后,定期进行VLBI观测并发布EOP产品.本文介绍了IVS机构、观测及产品概况,并基于2010–2019年国际分析中心公开发布的观测资料,分别从IVS产品日常监测服务能力、IVS不同类型观测网的EOP精度及其与测站网型的关系、全球主要区域网EOP服务能力3个角度,系统评估了IVS分析中心的EOP产品现状及保障能力水平,为进一步分析、评估区域网观测及服务精度提供依据.
2 IVS机构及产品
IVS作为国际地球自转服务组织(International Earth Rotation Service,IERS)的下属组织,其主要任务是开展VLBI观测、数据处理,维持地球在惯性空间的高精度定向(UT1-UTC、章动)以及长期稳定的地球参考架尺度,并提供国际天球参考框架产品服务1.IVS目前由32个观测站、3个操作中心、9个相关中心、5个数据中心、29个分析中心、7个技术发展中心和1个协调中心组成[5],测站及各中心的分布图见IVS官方网站1http://ivscc.gsfc.nasa.gov/.各国观测台站协同观测,相关中心及分析中心进行数据解算后向用户公开发布.
2.1 测地观测类型
在每年年末,IVS组织会发布次年的VLBI观测计划及观测纲要.每年约开展400余次观测用于测地研究及应用.根据不同的科学目标,可将IVS观测分为日常EOP监测、天球地球参考框架维持、研发实验等几类,不同类型观测采用不同的观测计划及观测站.按照观测时长,可分为1–2 h的加强观测、常规24 h观测和连续观测;根据测站分布,可分为全球网观测和区域网观测.IVS测地观测类型及说明见表1.
2.2 EOP产品
按照不同测地观测类型和用途,IVS向用户提供常规EOP观测(Earth Orientation Parameter Series,EOP-S)产品和加强型EOP观测(Intensive Earth Orientation Parameter Series,EOP-I)产品.
EOP-S产品由德国联邦制图与大地测量局(Federal Agency for Catography and Geodesy,BKG)、美国戈达德航天飞行中心(Goddard Space Flight Center,GSFC)、俄罗斯应用天文学中心(Institute of Applied Astronomy,IAA)、美国海军天文台(United States Naval Observatory,USNO)和法国巴黎天文台(Observatoire de Paris,OPAR)5家分析中心发布,产品每日进行更新.其观测数据来源主要包括以下5类观测网,分别为每周例行的IVS-R1/R4观测、应用于全球测地参考架监测的T2观测、公开发布的研发实验观测、VLBI连续加密观测和少数公开发布的区域网观测数据.其中,应用于EOP的日常监测及服务的IVS-R1/R4观测所占的比例在70%以上.常规EOP观测产品的周期在一个月左右.
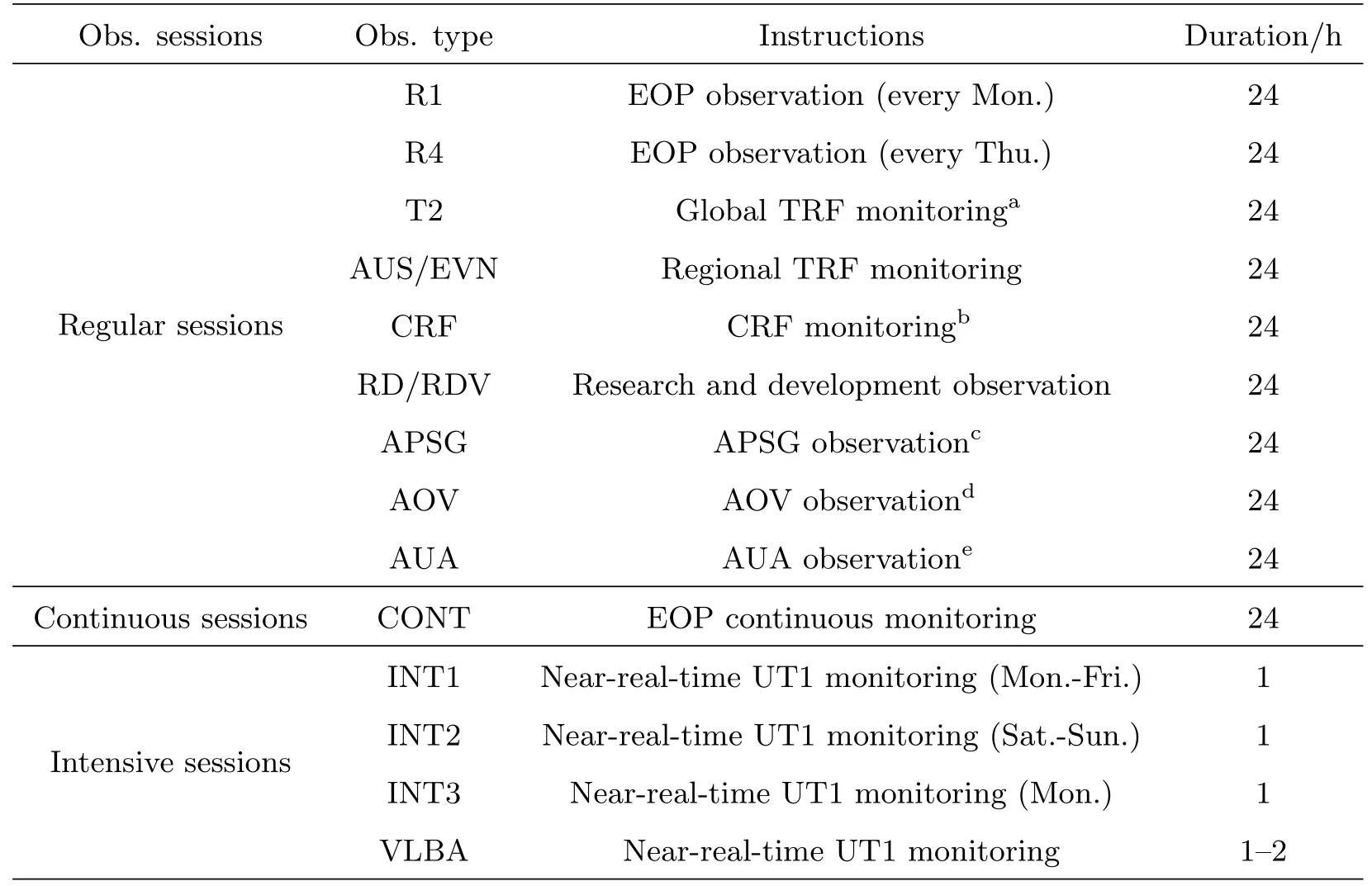
表1 IVS测地观测类型及说明Table 1 Types and descriptions of IVS geodetic observation
EOP-I产品的观测数据主要来源于IVS的“INT”系列观测.“INT”观测数据于2000年起开始提供公开下载服务,“INT”系列观测共分为INT1、INT2和INT3观测.2011年起,GSFC分析中心开始发布甚长基线干涉阵列(VLBI Array,VLBA)网观测数据及解算结果,目前VLBA网共有4个测站参与观测,分别为Mauna Kea(Mk)、Pie Town(Pt)、Los Alamos(La)和St.Croix(Sc),其中Mk-Pt基线及4测站组网观测定期观测,目前已经能够保证连续不间断地提供服务[6].VLBA观测解算结果已于2019年正式加入各分析中心的加强型EOP观测产品.产品每日进行更新,产品滞后于观测约24 h左右,考虑发布时差的问题,国内可在48 h内获得观测当天的EOP-I产品.
3 EOP日常监测、服务能力评估
3.1 数据及评估方法
为了直观反映EOP的日常监测、服务能力,以IVS-R1/R4及“INT”系列观测作为研究对象,分析资料为2010–2019年IAA、BKG、GSFC及USNO发布的“EOP-S”和“EOPI”产品,以年为单位分别对上述观测的解算精度进行分析.由于OPAR发布产品存在较多数据缺失,故没有对OPAR发布产品进行统计.
将解算结果中UT1-UTC以及极移两个分量的不确定度(1σ)即形式精度作为内符合精度的评价指标;外符合精度方面,将解算得到的EOP参数与IERS网站公布的国际天文学联合会2000决议(International Astronomical Union 2000 Standards,IAU2000)下的EOP C04时间序列首先归算至同一参考框架下,再采用3次样条插值方法归算至统一历元,并将差值的均方根(RMS)作为外符合精度.解算公式见(1)–(2)式.
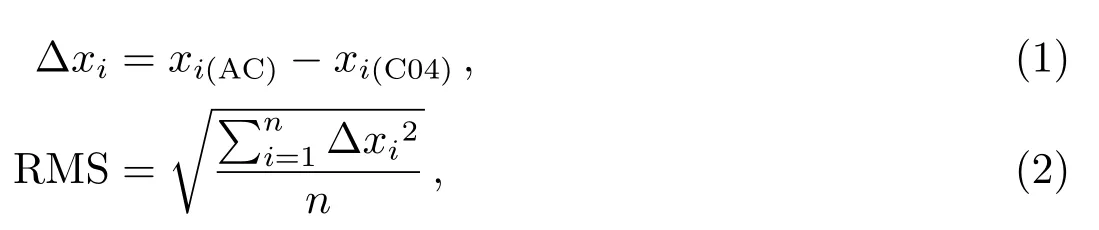
式中,xi(AC)为分析中心解算的UT1-UTC参数,xi(C04)为C04文件中的UT1-UTC参数,∆xi为分析中心解算的UT1-UTC参数与C04的互差,i为样本序号,n为样本个数.
3.2 常规观测
利用上述的分析资料及评估方法,对以上4家分析中心的极移X、Y分量(Xpole、Ypole)及UT1-UTC参数的内、外符合精度进行统计,并对比分析了IVS-R1和IVS-R4观测的精度,其统计结果见图1(a)–(d).图例中的R1、R4分别代表了极移及UT1-UTC分量在IVS-R1和IVS-R4观测的统计精度,图1(a)–(b)分别描述了Xpole、Ypole的不确定度和均方根误差,图1(c)–(d)描述了UT1-UTC分量的不确定度和均方根误差.
从图1中,可以得到以下结论:
(1)对比不同的观测序列,内符合精度方面,IVS-R1观测的精度总体优于IVS-R4观测.外符合精度方面,除了分析中心BKG的极移Y分量的结果外,其余均符合IVS-R1观测优于IVS-R4观测;
(2)对比不同分析中心的解算结果,总体而言,4家分析中心的解算精度差别不大.内符合精度方面,极移分量的形式精度总体优于0.05 mas,UT1-UTC总体优于0.003 ms,BKG的极移及UT1-UTC分量的精度稍差;外符合精度方面,极移分量的精度在0.2–0.3 mas左右,UT1-UTC精度在0.02 ms以内.
3.3 加强观测
利用2010–2019年“INT”系列所有加强观测资料,对以上4家分析中心的UT1-UTC参数的内、外符合精度进行统计,其统计结果见图2.
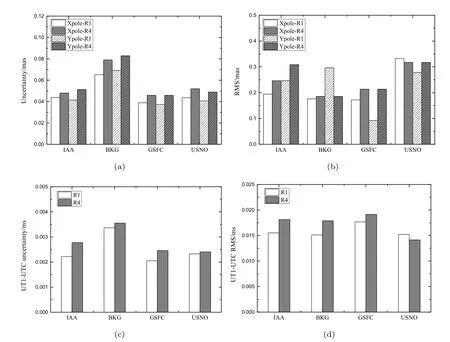
图1 常规观测精度评估统计结果Fig.1 Statistical results of IVS regular observations
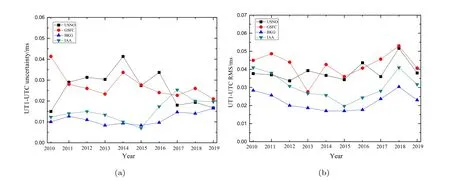
图2 加强观测精度评估统计结果Fig.2 Statistical results of precision of IVS intensive observations
对比不同分析中心的解算结果差异,其解算精度随时间的变化趋势基本一致;精度方面,IAA和BKG产品的内、外符合精度分别为0.02 ms、0.03 ms左右,略高于USNO和GSFC,不同分析中心外符合精度的最大差别在0.02 ms左右.
解算软件方面,除了IAA采用Quasar软件以外,其余分析中心(BKG、GSFC、USNO、OPAR)均采用CALC/SOLVE 11.0软件进行解算.各分析中心的解算策略基本一致,不同分析中心的解算结果有所差异,其原因可能与采用不同的数学模型及配置文件有关,具体原因有待进一步分析.
4 EOP精度与测站分布的关系
EOP的解算精度与观测台站的分布密切相关.观测台站的分布可以用观测台站所构成的几何体体积表示,理论上,观测值数量越多,测站分布越均匀,观测的精度越高.
利用2010–2019年所有公开的常规EOP观测数据进行分析,测站几何体体积的构造和计算方法见文献[7].按照IVS的不同观测网进行分类,并统计其精度,统计结果见图3(a)–(b).图中横轴表示测网体积,纵轴dXpole和dUT1分别表示极移X分量和UT1-UTC分量与IERS C04之间的互差.
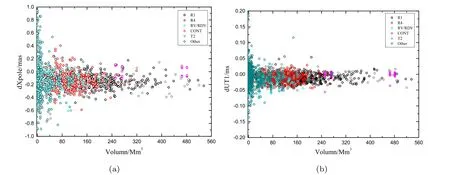
图3 EOP精度与测网体积的关系Fig.3 EOP differences w.r.t.network volume
通过图3可以看出,随着测网体积的增大,极移和UT1-UTC分量精度均有一定程度的提高,当测站网体积大于80 Mm3时,精度的变化趋于缓和.几种常见的观测类型的统计结果见表2.
由于RD/RDV观测多应用于科学研究,而T2观测的目的是全球测地参考架监测,在观测计划制定、观测射电源选择等方面与EOP的日常监测、服务存在差异.因此,利用上述观测类型的观测网解算的EOP精度有待于进一步评估和论证.通过表2可以初步推断,利用IVS全球分布的7个以上测站的极移服务能力优于0.2 mas,UT1-UTC优于0.02 ms.VLBI连续加密观测所能提供的极移和UT1-UTC外符合精度分别可达0.076 mas和0.007 ms水平.
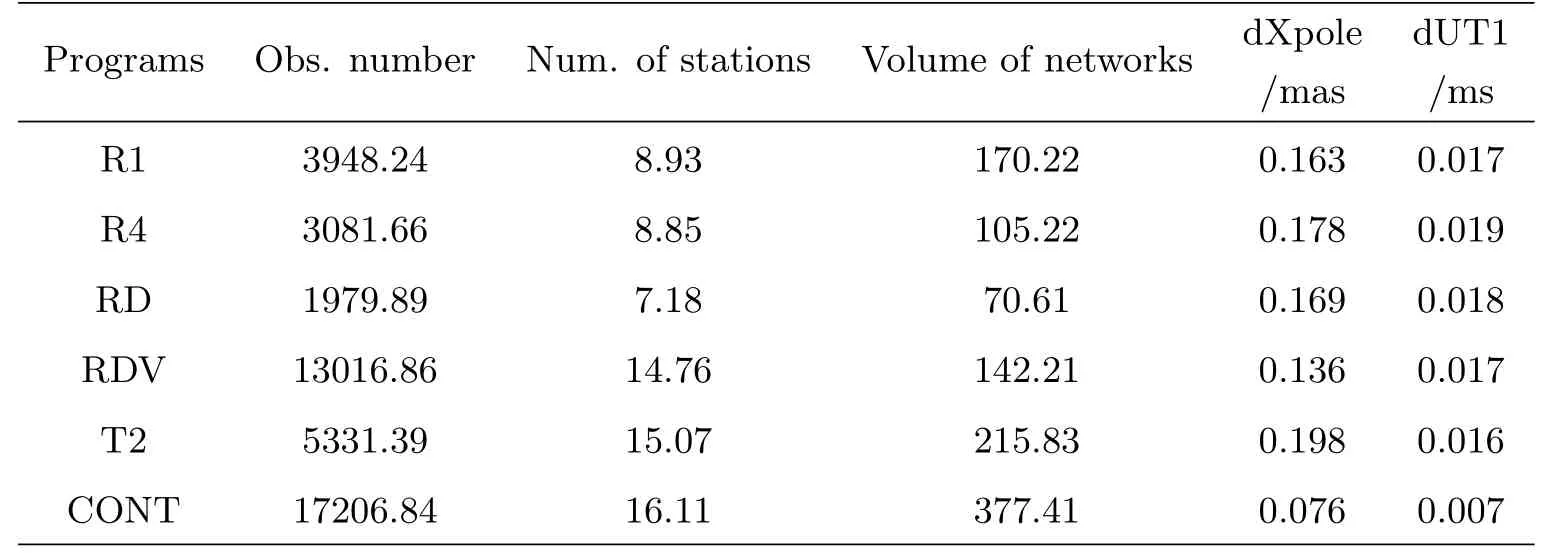
表2 不同IVS观测类型观测情况Table 2 Characteristics of IVS observing programs
5 区域网服务能力评估
5.1 加强观测
为了直观地反映各国的保障能力,对目前国际上几家机构加强观测的测定能力进行统计.表3中列举了IVS、美国、俄罗斯及欧洲地区已经开展或计划开展的加强观测序列及最长基线长度.亚太地区AOV组织、AusScope网也进行了加强观测实验,但由于未公开观测数据,也缺乏相关公开学术资料,因此暂未对该区域的加强观测能力进行评估.
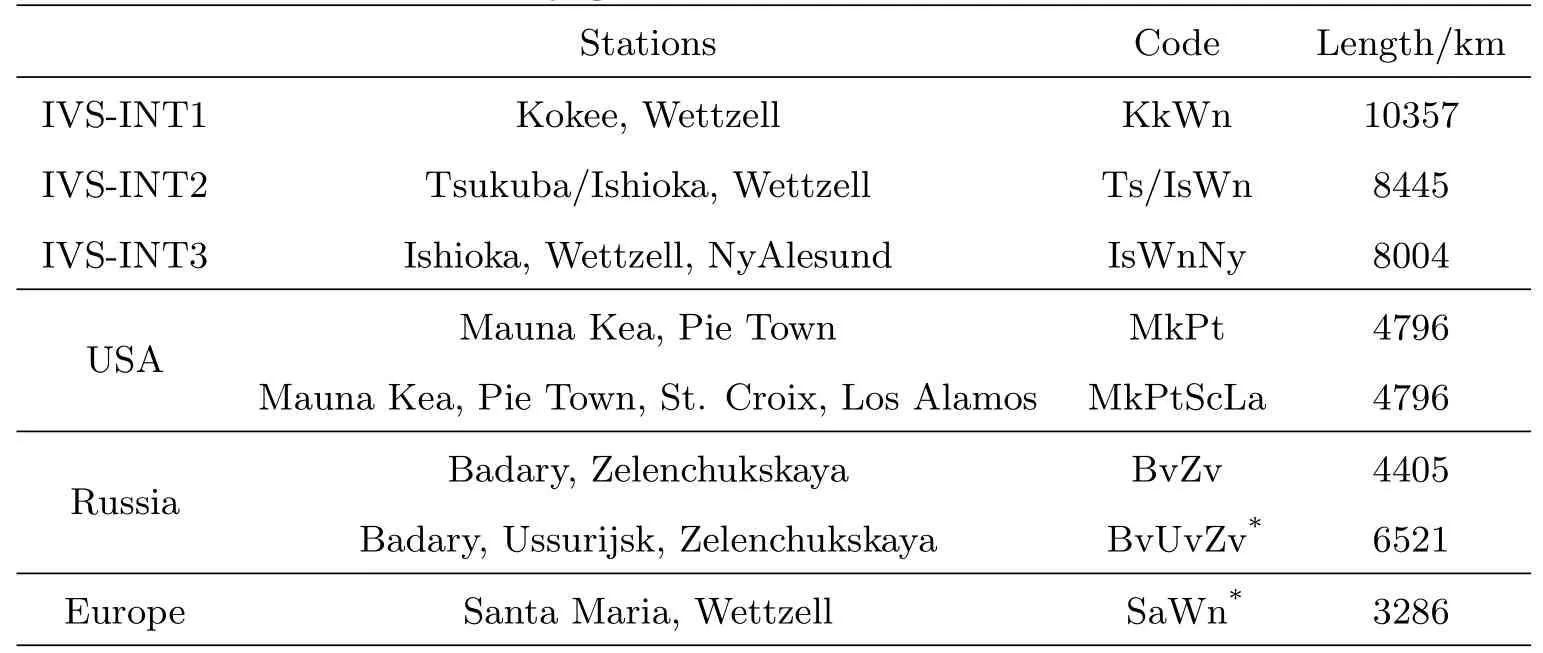
表3 全球主要加强观测序列Table 3 Mainly global intensive observation sessions
对其中几条重点基线的形式精度及与IERS C04的平均偏差(Avg.of dUT1)进行统计,其精度分别见图4(a)–(b).
总体而言,增加观测基线的长度和观测测站数有助于提高观测的精度.同INT观测相比,其余观测基线均短于IVS-INT观测基线,因此在解算精度方面,也较IVS-INT稍差.美国方面,MkPt基线的内、外符合精度分别为0.023 ms、0.195 ms.为了弥补国内单基线长度的不足,采用增加观测时长(采用1.5–2 h的观测时长,长于IVS采用的1 h观测时长)、组网观测等手段,进一步提高观测精度,其组网观测的精度与“INT”系列的偏差约为0.015 ms;俄罗斯方面,目前国内已建成的BvZv基线的内、外符合精度分别为0.026 ms、0.029 ms,在Uv台站建成后,预计将外符合精度提高至0.025 ms[8];欧洲方面,SaWn基线将是未来欧洲加强观测的主要基线,目前仍处于系统测试及实验阶段,尚未面向用户投入服务,本文所统计的数据来源于Böhm等人的仿真实验,预期该基线将达到优于0.04 ms的服务[9].
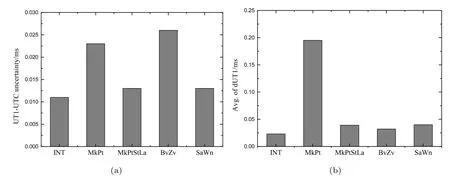
图4 不同地区加强观测精度Fig.4 Accuracy of intensive observation in different areas
5.2 常规观测
为了分析不同区域网与IVS全球观测的差异,将研究对象划分为以下4个:分别为美国VLBA观测网、欧洲观测网(European VLBI network,EVN)、亚太AOV观测网和澳大利亚AusScope观测网.分别将上述观测网的解算结果与IVS-R1/R4结果进行对比,极移分量的形式精度与平均偏差(Avg.of dX/Ypole)分别见图5(a)–(b),UT1-UTC分量的形式精度与平均偏差(Avg.of dUT1)分别见图6(a)–(b).
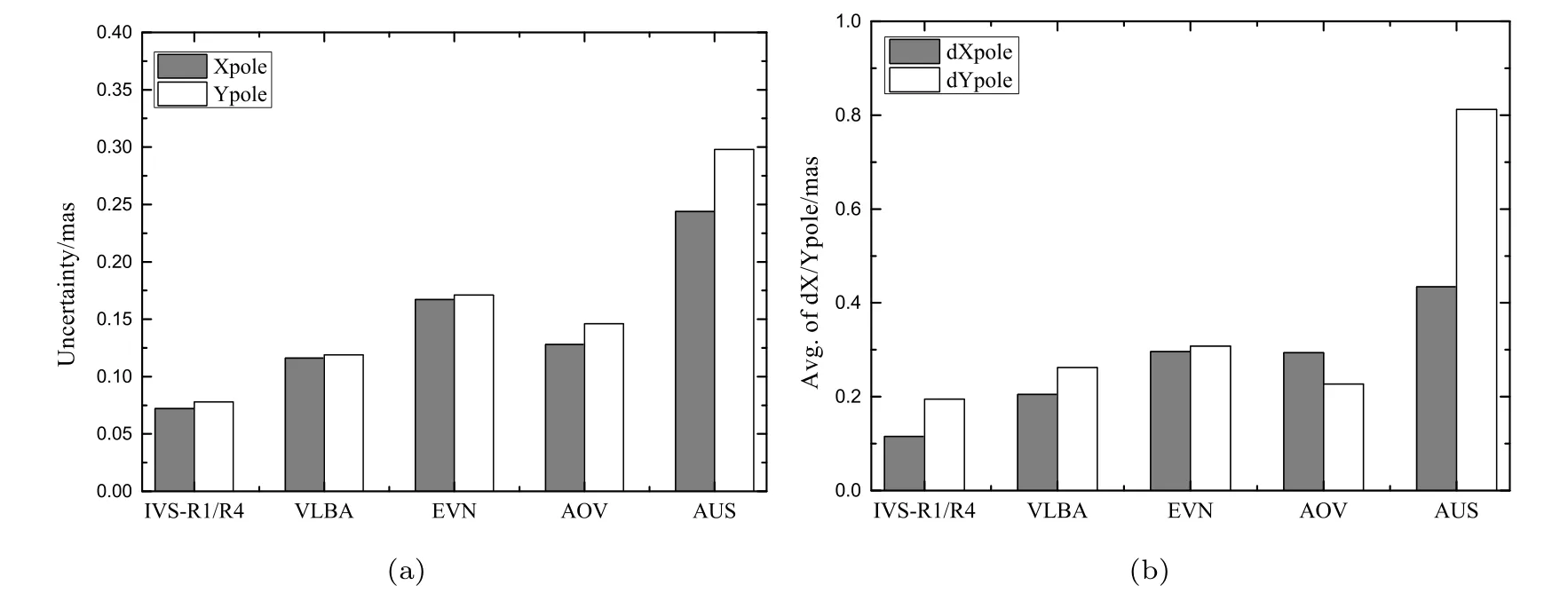
图5 不同地区常规观测极移精度对比图Fig.5 Comparison of regular observation polar motion accuracy in different areas
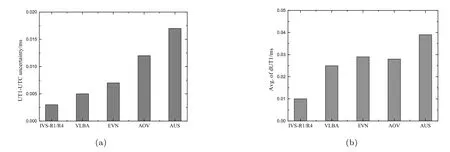
图6 不同地区常规观测UT1-UTC精度对比图Fig.6 Comparison of regular observation UT1-UTC accuracy in different areas
从图中可以得到以下结论:
(1)对比不同地区的极移精度,美国VLBA网的精度与IVS全球网精度最为接近,外符合精度在0.2 mas左右,EVN和AOV观测网次之,澳大利亚AusScope的精度最差.亚太和欧洲网的解算精度相仿,偏差均在0.25 mas左右.此外,极移X分量的解算精度普遍高于Y分量,只有AOV解算是个例外,其原因可能与亚太地区观测网型与地心方向投影的特殊性有关;
(2)对比不同地区的UT1-UTC精度,其规律与极移精度相仿,美国VLBA解算网精度最高,但差别并不明显,亚太及欧洲的区域网解算偏差在0.025–0.03 ms,高于IVSR1/R4观测的0.01 ms.澳大利亚AusScope网由于观测网几何关系及天线转速的制约,解算精度较低,偏差为0.039 ms.
6 总结与展望
本文系统介绍了IVS机构、下属分析中心概况以及目前的测地观测产品类型,并基于2010–2019年公开发布的产品,分别从IVS产品日常监测服务能力、IVS不同类型观测网的EOP精度及其与测站网型的关系、全球主要区域网EOP服务能力3个角度,系统评估了IVS分析中心的EOP产品现状及保障能力水平.结论表明:虽然不同测网的观测用途存在差异,EOP服务能力也存在差异,但利用IVS全球分布的7个以上测站的综合数据可使极移精度提高至约0.2 mas,UT1-UTC精度优于0.02 ms;区域观测网方面,美国VLBA网的常规、加强观测的UT1-UTC分量的外符合精度分别可达0.025 ms、0.195 ms,与IVS全球观测结果最接近.
后续的工作重点是对自主解算的EOP产品进行系统评估,并寻找与国际发布产品的差距,在此基础上对我国VLBI网进一步分析以提高服务精度,为后续的EOP自主生产及服务打好基础.
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2021年5期)2021-10-13
科学(2020年5期)2020-11-26
读者·校园版(2020年19期)2020-09-16
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
舰船电子对抗(2019年6期)2019-04-27
英美文学研究论丛(2018年1期)2018-08-16