行星(月球)自转监测望远镜的原理样机地面验证实验*
2021-05-31 05:46:32孙立早黄乘利齐朝祥唐正宏赵铭
天文学报 2021年3期
孙立早 于 涌 黄乘利 齐朝祥 唐正宏 赵铭
(1中国科学院上海天文台上海200030)
(2中国科学院大学天文与空间科学学院北京100049)
(3中国科学院行星科学重点实验室上海天文台上海200030)
1 简介
太阳系类地行星和月球虽然已有很长的观测历史,但是人类还远没有充分了解它们的属性,特别是对深内部结构和物理性质等问题的认识仍然十分不确定.行星(月球)内部物质的密度分布和动力学机制是决定它们空间运动的关键因素之一,因此比目前精度更高的行星自转(月球物理天平动)观测资料将有助于突破行星(月球)科学研究中的瓶颈.对于距离地球最近的月球,本文研究团队提出用行星(月球)自转监测望远镜(Planetary/Lunar Rotation Monitor,PRM)对月球物理天平动进行现场(in-situ)高精度观测[1–2].
尽管该望远镜的科学目标是安放在月球表面监测月球天平动,但是为了在理论研究和计算机模拟以外开展观测原理和设备方案的研究工作,考虑到地球自转与月球自转在起源和规律上具有相似性,且地基与月基两种情形对大部分观测误差来源也有共通性,研制原理样机并开展地基观测实验是有效途径之一.从2017年年初起,本文研究团队定址国家天文台兴隆观测站开展这项工作,本文的叙述也将兼顾月球与地球两种情形.
本文第2节将对实验情况作介绍;第3节主要讨论实测资料的天文处理方法以及用观测资料研究地球自转变化的初步结果;第4节将分析讨论观测中存在的问题以及对月基观测的启示.
2 观测原理及望远镜样机
2.1 月基观测原理简介
PRM望远镜是一台可以同时观测3个不同天区的月基光学望远镜,它通过置于光路最前端的3面反射镜组(如图1)实现汇集3个天区星光的功能,使得每个视场的星象经对应镜面反射后都可以沿望远镜主光轴方向进入光学系统,然后仅使用一套光学系统和一台CCD(charge coupled device)相机同时接收来自不同天区的星象.由于多个观测视场将平分望远镜的光学探测能力,选择观测3个视场是目前在获取更多的观测信息与保持较高的成像质量两个需求之间的平衡.
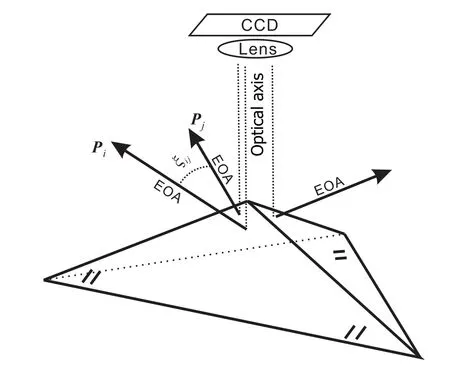
图1 反射镜组示意图.望远镜主光轴被3面反射镜组分为3个等效光轴(effective optical axis,EOA).EOA的指向受到反射镜组几何构型的约束,两两EOA指向之间的夹角满足Pi·Pj=cosξij=const.Fig.1 Illustration of the mirror set.The main optical axis of the telescope is divided into three effective optical axes(EOAs)by the mirror set.The directions of the EOAs(e.g.Pi and Pj)are constrained by geometry of the mirror set and follow Pi·Pj=cosξij=const.
反射镜组的每个反射面朝向不同的天区,混合成像的同时3个观测视场之间仍然相互独立,并且它们的观测效果与3台指向相同的等效独立望远镜完全一致.归算3视场观测资料时,用与之等效望远镜的光轴指向(视场中心)作为3视场望远镜对应视场的EOA指向,通过视场内恒星星象位置的测量确定EOA的指向.由于制造反射镜组的材料是低热膨胀(线膨胀率小于10−7K−1)的微晶玻璃,3个EOA之间的夹角将具有很高的热稳定性,以EOA指向Pi和Pj为例,Pi·Pj=cosξij=const.基本角ξij(i,j∈{1,2,3|ij})在数据处理中起约束3个EOA指向的作用.
望远镜需要在月球表面稳定安装,之后保持相对月球参考框架(selenographic reference frame)指向不变,于是3个视场EOA的指向将以约27.5 d的周期随月球自转在天球参考框架(celestial reference frame,CRF)中划出3条轨迹.在很短的时间跨度内,3个EOA指向的轨迹近似为3段同心圆弧(图2),计算圆心的天球坐标可以确定月球自转轴在惯性空间中的指向,圆心的运动就是月球的岁差-章动;EOA指向轨迹圆弧3个半径值的变化是月球自转轴在月球参考框架中移动造成的,即月球的极移.
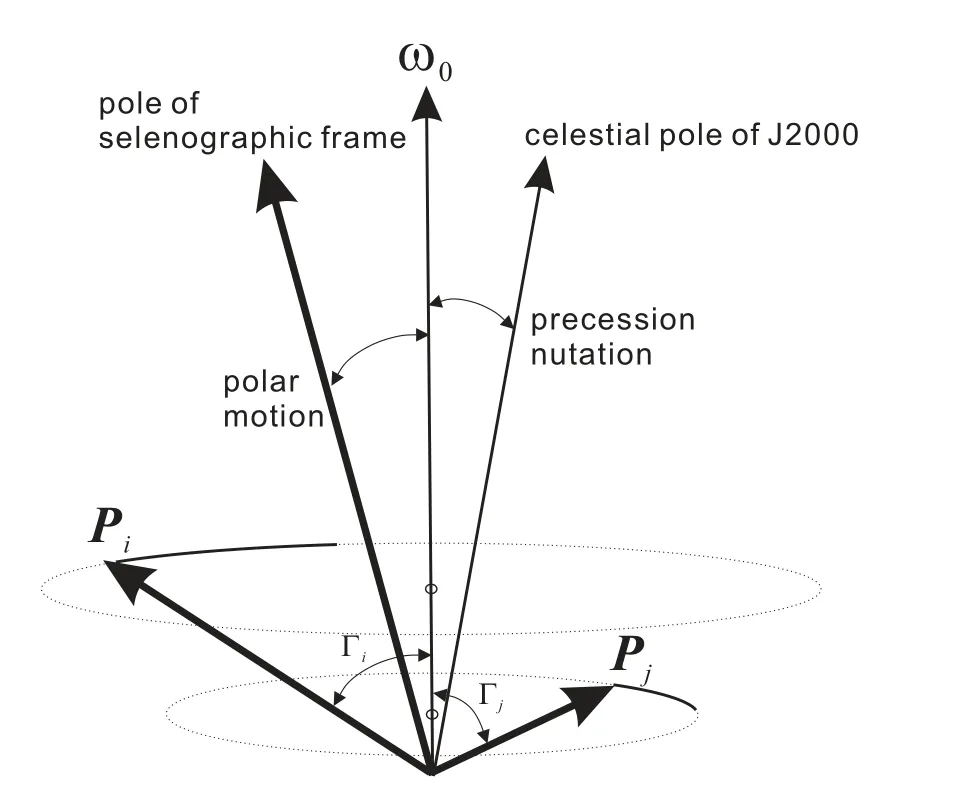
图2 观测原理示意图.通过EOA指向变化轨迹,计算:月球自转轴在CRF中的指向(ω0),自转轴和EOA(如Pi)之间的夹角(如Γi).EOA在月球参考框架中指向不变(粗线)并随月球自转在CRF中划出轨迹.在很短的时间跨度内,EOA轨迹圆心的位置与月球自转轴重合,月球极移造成自转轴在月球参考框架中的位置变化,极移可以通过轴与EOA之间的夹角变化(Γi,i=1,2,3)测定.Fig.2 Principle of observation.Through observed traces of directions of EOAs,one can calculate:the direction of the rotation axis of the Moon in CRF(ω0),the angles(e.g.Γi)between the rotation axis and the EOA(e.g.Pi).With fixed EOAs in the selenographic reference frame(bold lines)rotating along with the Moon in CRF,during a short period,the common center of the three EOA traces coincides with the rotation axis of the Moon.Change of the position of the rotation axis of the Moon in selenographic frame(i.e.,the polar motion)can be determined through variations ofΓi(i=1,2,3).
Sun等[3]对月基观测的原理进行了详细的研究,本文在此基础上对原理样机地面观测实验的情况进行讨论.
2.2 原理样机设备情况
地基观测中的原理样机按月基观测原理设计,其主体以及观测所需的辅助设备均置于特制的观测室内,观测室侧面在3个视场各自光路方向上留有开口.原理样机的结构和光路如图3,主要组成部分有:(1)头朝下安装的180 mm口径、220 mm焦距光学望远镜(由福光股份生产),安装支架的材质是殷钢(in-var steel,一种低热膨胀的铁基高镍合金);(2)镀银反射层的3面反射镜组,由一整块热膨胀极低的微晶玻璃加工而成;(3)装置于望远镜光路末端的Apogee F9000 CCD相机.
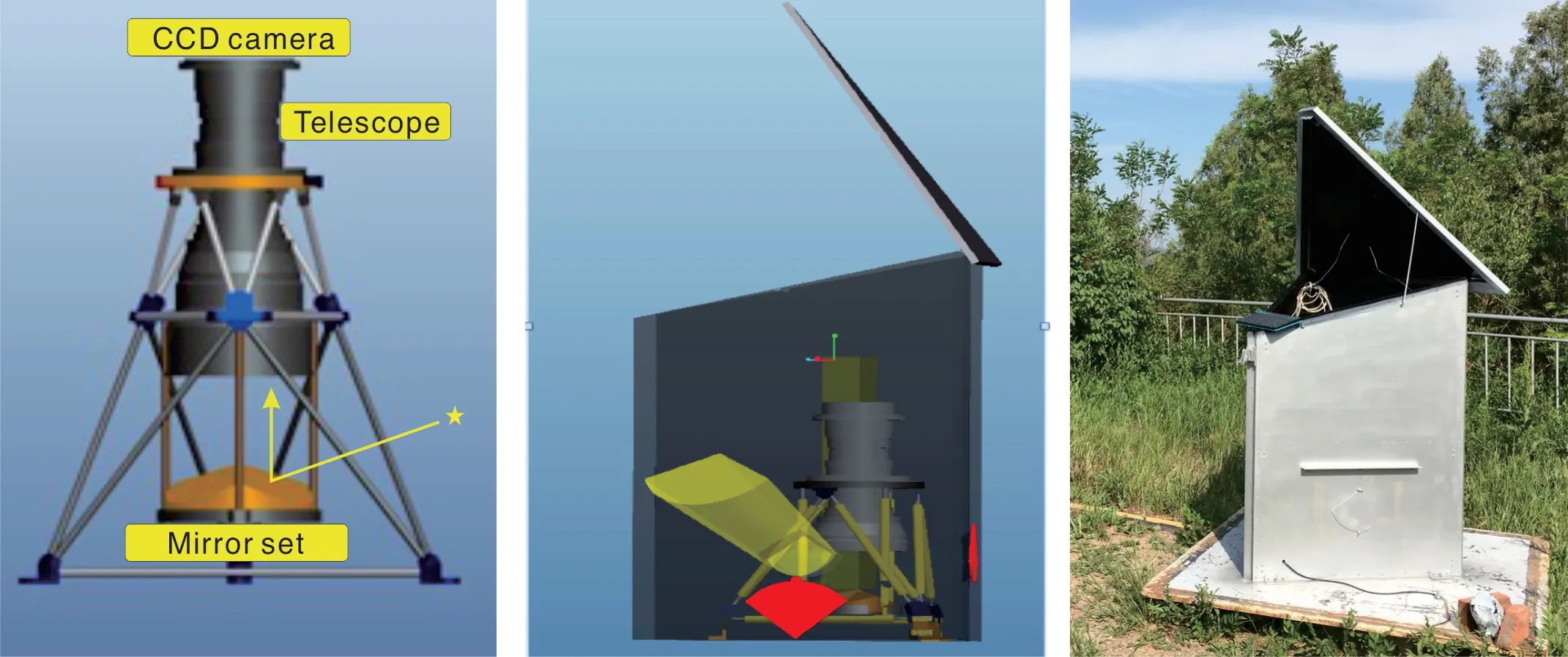
图3 原理样机结构图.一台光学望远镜头朝下安装在支架上,支架底部安装了一个3面反射镜组.星光经反射后进入望远镜光瞳,由安装在镜筒末端的CCD相机成像.Fig.3 Illustration of the prototype telescope.An optical telescope is installed upside down on the supporting system,and the mirror set is at the bottom.Star light propagates into pupil of the telescope after being reflected by the mirror surface,and is imaged on the CCD camera mounted at the focal plane.
反射镜组的使用使得3个地平高度角接近,但是方位角互成120°分布的天区可同时被观测到.设备安装时确定3个EOA在地平坐标系中的指向并在观测期间保持固定,EOA指向还受到反射镜组几何构型的约束.原理样机的基本参数如表1.
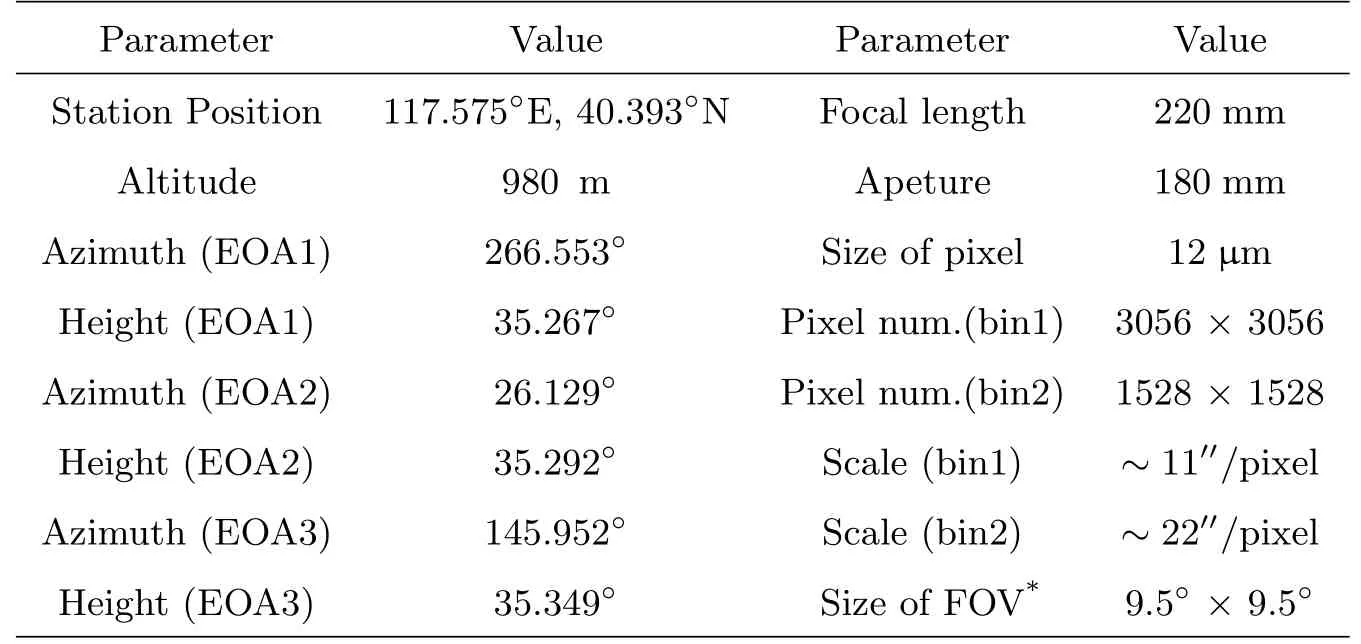
表1 原理样机基本信息Table 1 Specifications of the prototype telescope
3 观测及资料处理
2018年1月开展的第1阶段观测实验旨在研究资料的处理方法.实验中原理样机3个视场都处于凝视观测状态,为了避免星象拖尾,bin1模式和bin2模式的曝光时间分别为0.5 s和1 s.图4是原理样机混合有3视场星象的一幅观测图像,从中无法直接确定星象所归属的视场.

图4 原理样机实测图像示例(视场中心局部)和计算机模拟不同观测波长的星象成像.受增加一次光线反射所引起的像差(光程差)和反射镜组及望远镜的光学加工误差等因素的综合影响,合焦状态下星象形状为非圆形.Fig.4 Sample of the image by the prototype telescope(extracted from the center of the original image)and the computational simulated image at different wavelengths.Profile of the well focused star image is affected by both the aberration raised from the extra light reflection and error in manufacture of the optical system and the mirror set.The star after focusing is not in circle shape.
对3视场望远镜每一幅实测图像的处理过程首先是进行经典的图像天文处理作为后续工作的基础,而后从3视场混合图像中分别找到属于各个视场的星象(星象区分)继而对各视场独立进行后续处理,最后归算得到每个视场EOA指向的天球坐标.处理流程如图5所示.
3.1 图像天文处理
CCD图像的天文处理主要包括:扣除暗流和本底、平场改正、星象信号提取和定位.其中,平场改正采用的方法是中值滤波法[4],无需拍摄清晨或黄昏的天空.星象提取是通过连通域算法[5]将星象信号从背景噪声中提取出来.由于星象形状不圆,确定星象能量分布中心采用的算法是2维修正矩方法[6].
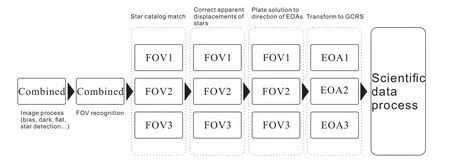
图5 观测资料处理流程图Fig.5 Pipeline of image processing
3.2 星象区分
3视场望远镜共用同一个望远镜和CCD相机接收来自3个不同观测视场的星象,且来自不同视场的星象在单幅图像上的位置分布没有特异性.然而3个EOA在地固参考框架中的指向不同,不同视场星象周日运动角速度相同但线速度不同,投影到CCD靶面上看,各个视场中星象在前后图像之间位移的大小和方向将存在差异,因此可以据其运动规律认证星象归属视场1Sun L Z,Huang C L,Yu Y,et al.in preparation,2021.
预先统计的各视场星象运动规律如表2.由于观测视场范围较大,其涵盖的赤纬范围大,使得视场中所有星象的移动速率存在一个区间范围.3个观测视场中的视场1和视场3指向赤纬较低,视场内星象运动轨迹基本呈直线,移动规律较一致;视场2的指向靠近北极,星象周日运动轨迹半径小,视场范围内星象运动规律复杂因而需放宽运动规律的阈值.
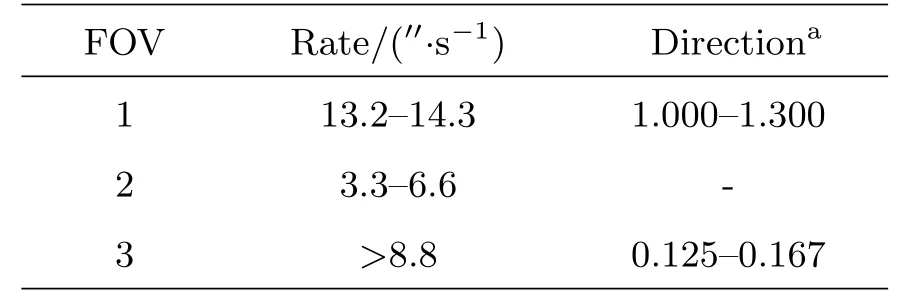
表2 星象区分中使用的星象运动规律约束条件Table 2 Constraints on the motion behavior of star images in FOV recognition of stars
在两幅先后拍摄的图像中每次各取一颗星并计算它们在CCD靶面上的距离,若位移量符合某一视场的运动规律则将其记入该视场,遍历所有前后两颗星的组合即可完成星象区分.如图6,各个视场星象移动方向和速率的差异越显著,则越有利于星象区分.这样的区分方法使得每个视场的区分结果中不会遗漏属于该视场的星象,但是可能误将其他视场星象纳入其中,这种概率会随着星场密度的提高而增加.
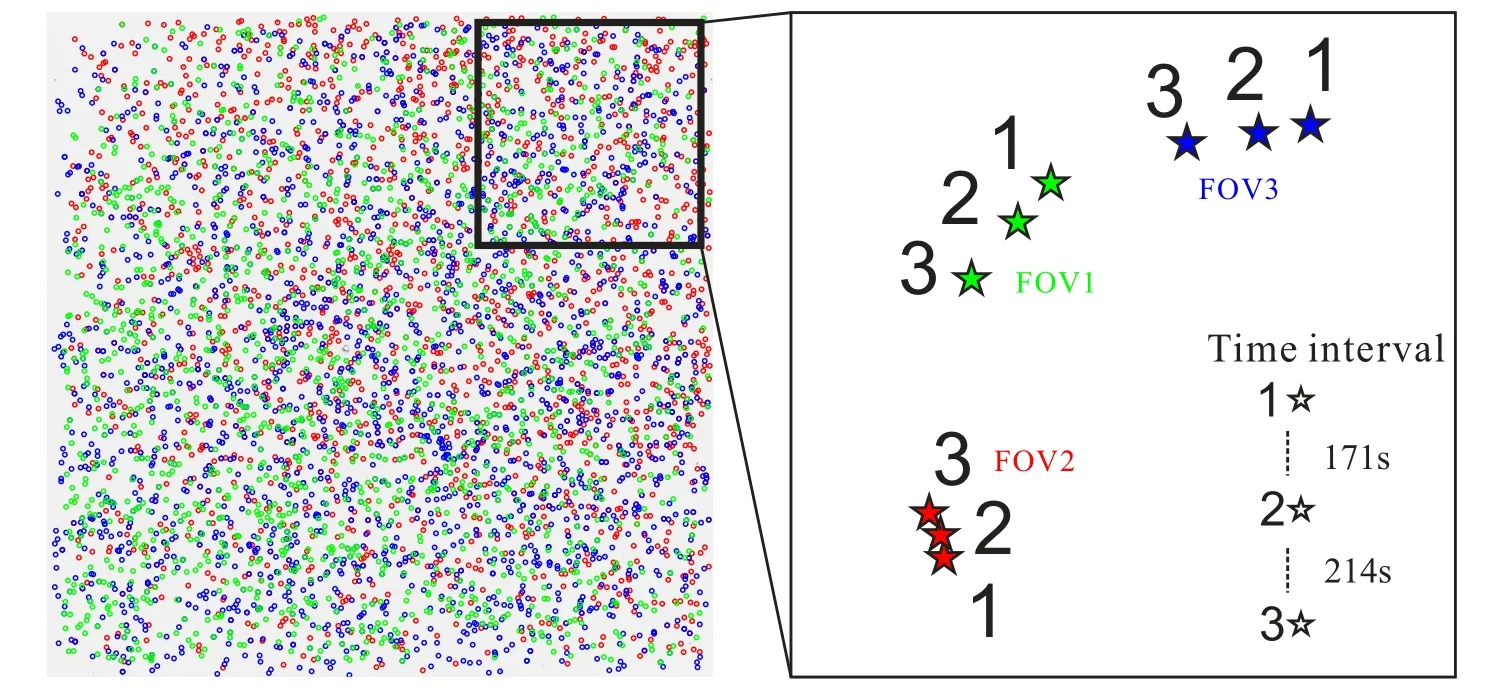
图6 实测图像星象归属视场区分示例以及星象在前后3个历元之间的移动轨迹(根据实测资料等比例绘制)Fig.6 Illustration of FOV recognition of star images in observation and moving traces of star images within three epochs(equally depicted from observational data)
为了减少区分错误带来的影响,首先可以在选星过程中根据望远镜实际观测能力设置合理的星等范围,再通过后续与星表中相同天区星象的匹配来排除绝大部分区分错误的星象.仍然存在的误判目标将在之后的底片参考模型归算中表现为高残差,通过检验并迭代可以有效处理.表3列举了某一幅观测图像的实际处理情况,其中只选择了8–10等亮度的优质星象纳入最终EOA指向的归算.

表3 观测图像处理中不同步骤所处理星象的统计Table 3 Quantity of stars in successive procedures of image process
3.3 EOA指向归算
经星象区分处理,3视场望远镜拍摄的每一幅图像等效为3视场各自独立观测图像之合成,后续我们对区分得到的3视场各自的图像分别进行平行的处理和归算.首先需要计算所有恒星的天球坐标(与The Fourth US Naval Observatory CCD Astrograph Catalog,UCAC42星表匹配),其原理是搜索星表并通过一簇星象相互位置关系的特征匹配视场内星象与星表中对应星象(子图同构[7]).
引起星象观测位置偏离星表位置的天文学效应包括自行、视差、光行差和光线引力偏折等,它们也将以相似的形式存在于月基观测之中.地基光学观测精度的最大制约是大气折射对星象位置的影响,考虑地球岁差-章动,我们采用大气密度随海拔高度变化且径向对称分布的大气模型(普尔科沃模型),根据实测气温和气压可以修正每个星象的天顶距[8].
由于3视场望远镜焦距短且视场大,拍摄的图像光学畸变显著,同时星象数量较多,因此选择分别对3个视场(FOV1、FOV2、FOV3)拟合20参数底片归算模型(表达式见Kovalevsky等[8])来描述星象在底片上位置与其天球理想坐标之间的关系,并计算中央像素点的天球坐标作为每个视场EOA指向的天球坐标.以2018年1月8日为例,3个视场底片参考模型拟合的中误差分别为1.22′′、1.29′′和1.50′′,误差的大小衡量了测量星象位置的平均精度,反映了光学成像质量的高低.为了对所有资料统一在GCRS(Geocentric Celestial Reference System)中研究EOA的指向变化,还需要将EOA指向转换到GCRS中.
3.4 地球自转轴指向的解算
获得EOA指向变化观测资料后,我们尝试解算每个观测日中间历元地球自转轴在天球参考系中指向的坐标.通过与理论值比较,对原理样机观测精度与观测误差进行分析研究.
相比观测精度,固体潮和海潮负荷引起的倾斜(至少比观测精度小1个数量级)不足以在EOA指向观测资料中得以体现,因此认为EOA的指向在地固参考框架内保持不变并在观测期间随地球自转在恒星背景中划出轨迹(如图7所示).
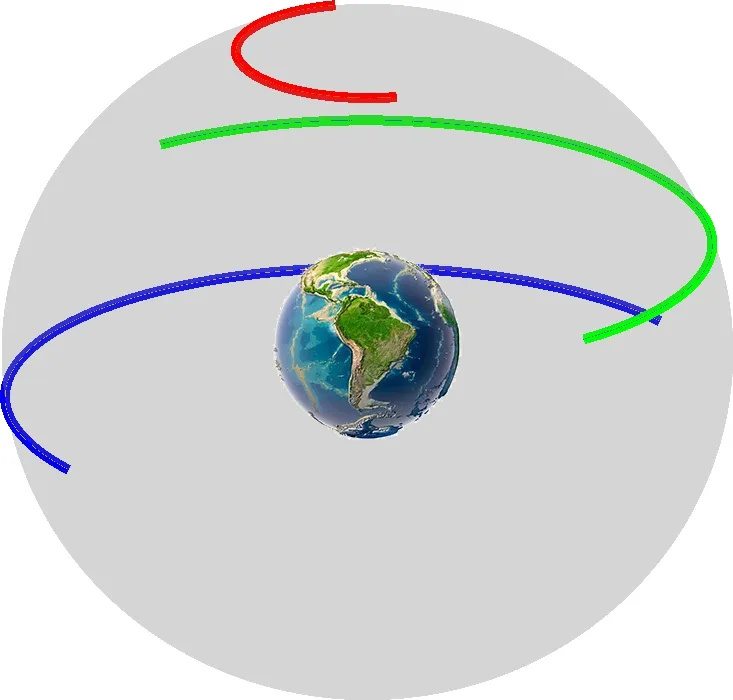
图7 一晚观测期间3个EOA在天球中指向变化示意,3条轨迹近似处于互相平行的平面上,3个平面共同法向量的指向与观测期间地球自转轴的平均指向一致.绿:EOA1,红:EOA2,蓝:EOA3.Fig.7 Illustration of change of the three EOAs’directions in observation during one night.The three traces are on surfaces approximately parallel to each other.The common normal of the surfaces coincides with the mean direction of the rotation axis of the Earth.Green:EOA1,Red:EOA2 and Blue:EOA3.
地球自转轴在每晚观测期间(持续若干小时)的指向变化相比原理样机的观测精度也很小(变化一般不足10 mas),若暂时忽略则3个EOA每晚划出的弧段将处于3个互相平行的平面上,于是观测期间地球自转轴的平均指向与3个平面共同法向量的指向一致,解算方程是:

其中(xi,t,yi,t,zi,t)是观测历元3个EOA在天球坐标系中指向的直角坐标,是资料时间跨度内地球自转轴在天球坐标系中指向的平均位置.Di=cosΓi是3个EOA(Pi)与自转轴(ω0)夹角(Γi)余弦的平均值,描述了地球自转轴相对3个EOA的位置.
若资料时间跨度长且观测精度高,需要将长序列分解为若干短的采样片段分别解算,这样可以测量资料时间跨度内自转轴的移动[3].
对2018年1月以bin1模式拍摄的观测资料进行试算.取16:00–19:00UTC的资料段计算中间历元地球自转轴指向的天球坐标(O),理论值(C)来自国际天文学联合会(IAU)推荐的标准模型:IAU2006岁差模型和IAU2000章动模型的理论计算,并附加IERS EOP(International Earth Rotation and Reference Systems Service,Earth Orientation Parameters)14C04序列公布的天极位置偏差3www.iers.org/IERS/EN/DataProducts/EarthOrientationData/eop.html.(来自甚长基线干涉VLBI的观测,在2018年1月的观测日中最大不超过0.5 mas),过程中使用了IAU SOFA(Standards of Fundamental Astronomy)库4www.iausofa.org.的标准计算程序.计算O和C之间的角距离(O−C),结果显示偏差平均约1′′,如表4.

表4 2018年1月期间计算地球自转轴在天球坐标系中的指向Table 4 The direction of the rotation axis of the Earth in celestial sphere observed during January 2018
4 观测实验质量分析
4.1 情况分析
对于两种不同的像素合并(binning)模式,bin1模式下对星象采样更充足,空间分辨率更高,但图像数据量大;bin2模式可以适当延长曝光时间以获得更暗的极限星等和更高的成像稳定性,但可能降低单星定位精度.在星象不拖尾的情况下,原理样机3个视场观测的极限星等可暗于12.5等(对应信噪比SNR=5),但是归算中一般取8–10等范围内的优质星象.
造成星象形状不圆的原因与在望远镜光瞳前对光线增加的一次反射有关,也可能与单个观测视场所使用反射镜面形状非对称(扇形)有关.星象中不同波长光线在到达接收端时将存在光程差(像差的一种形式),与反射镜面以及望远镜的光学加工误差合并后造成星象形状偏离圆形.理论上通过限制观测波长的范围可以降低光程差的影响,但是在短曝光情况下额外衰减星光强度对观测更为不利,因此需要在未来对光学设计进行全面优化.
目前采用2维修正矩方法分别对bin1和bin2模式下星象测量其中心位置坐标的精度均约等于相应binning模式下像元尺度的1/10,主要受制于星象形状存在的问题以及采样率不足.
望远镜初始焦距调整的依据是将星象的半峰全宽(FWHM)尽可能调至最小,使星象成像达到最锐利的状态.除了像质存在明显变化的情况,一般在观测期间不作焦距调整.观测的过程基本可以全自动进行,对条件以及人工的依赖性很低.两次连续曝光之间的时间间隔可以进行调整,使得控制图像总量的情况下时间跨度可调.考虑到封闭的观测室在打开后存在平衡内外温差的过程,除了在观测准备过程中提前预留时间,观测初期的资料也可能受其影响而不宜纳入归算,因此一般最佳观测窗口在15:00–20:00UTC.
4.2 误差研究
原理样机的光学系统是普通商业望远镜,通用化的设计和制造对进一步提高观测精度制约颇大,温度变化引起的形变是本原理样机观测中除大气折射以外制约观测精度的最主要因素.
观测中若EOA的指向不稳定,会使观测所得EOA指向在CRF中的变化不能准确反映地球自转变化.提取EOA指向误差数据的方法是将每个观测历元EOA指向在GCRS中的坐标P(α,δ)(α为赤经,δ为赤纬)转为地平坐标系中的坐标P′(A,h)(A为方位角,h为俯仰角),具体方法是:

其中Ri(i=1,2,3)表示绕坐标系3个轴的旋转矩阵,P N(t)是岁差-章动矩阵,ERA是地球自转角,∆λ与∆ϕ分别是极移对台站经度和纬度的影响,它们都可以通过IAU标准程序库SOFA计算,其中使用了IAU2006岁差模型和IAU2000章动模型,极移序列来自IERS EOP 14C04.(λ,ϕ)是观测台站在ITRF(International Terrestrial Reference Frame)中的坐标.
以2018年1月8日为例,计算发现3个视场EOA在观测期间存在整体指向变化.其中南北方向的倾斜量比较显著(如图8),与期间气温变化相比约滞后1 h,表明热形变是引起整体指向变化的因素之一.
由于原理样机没有全部采用低热膨胀材料,因此一旦存在温度变化就可能导致观测设备热胀冷缩.白天日晒会引起观测室内高温,而夜间观测时气温较低,为了避免打开观测室时温度快速变化对观测的直接影响,需要预留充分的热平衡时间.另外,由于望远镜镜体封闭且内充氮气,内部温度平衡的过程理论上要缓慢很多,我们观测到两两EOA指向之间夹角的计算值和图像底片比例尺在观测窗口内前3 h有显著变化(图9),这可能是望远镜内部组件在消散白天蓄热的过程中发生形变,并引起了光学参数变化.当热平衡趋于缓和,EOA指向的稳定性会随之提高,因此16:00–19:00UTC的观测资料质量为1 d内最佳.若进一步考虑夜间观测过程中的温度变化,由于气象因素不可控,采用一些温控措施可能会对提高观测精度有帮助.
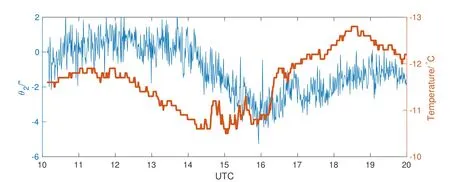
图8 2018年1月8日观测期间望远镜3个EOA整体指向变化的南北分量和气温.整体指向变化有随温度变化并滞后约1 h的现象.左侧坐标:3个EOA整体指向变化的南北方向分量θ2(′′),右侧坐标:气温(°C).Fig.8 Entire change of three directions of EOAs in North-South direction and temperature during observation on the 8th January 2018.Directions of EOAs change with temperature.The time lag between temperature change and the telescope’s response is about 1 hour.Left:entire change of directions of EOAs in North-South directionθ2(′′).Right:temperature(°C).
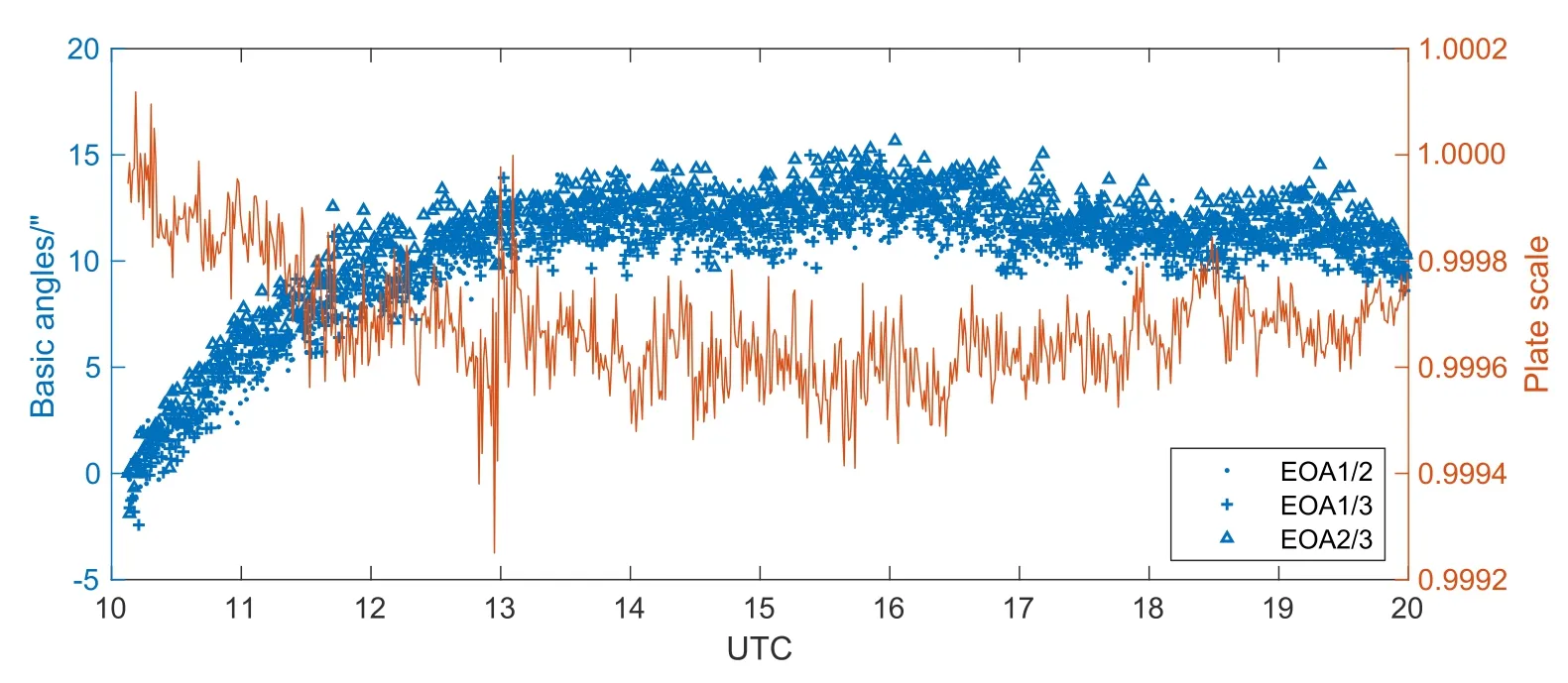
图9 2018年1月8日观测期间两两EOA指向之间夹角的变化(左)与底片比例尺变化(右).显示望远镜内部的热平衡过程可能持续至13:00UTC.Fig.9 Change of the angles among EOAs(left)and change of the plate scale(right)during observation on the 8th January 2018.It reveals thermal exchange in the inner of the telescope continues until about 13:00UTC.
5 总结与讨论
通过原理样机观测实验和资料分析测得了地球自转轴的指向,证明3视场观测技术和资料处理及归算方法的可行性.目前的观测精度一方面受制于大气折射对地面光学观测的影响,另一方面受制于原理样机非月基观测设备的正样,即它的设计和制造中存在许多影响观测质量的不足之处.
短焦距望远镜光学分辨能力低并且对星象的采样也不足,目前直接阻碍了星象测量精度的提高,也使得无法开展特殊形状星象的研究.光程差所导致的星象形状问题在目前的技术中还不能实现用一个改正镜对3视场的光程差同时进行补偿,而2维修正矩定心方法对星象形状的敏感也间接影响了观测的稳定性.
原理样机所用商业望远镜的热稳定性指标与观测需求存在较大的差距,其中热形变会直接改变望远镜的指向.当与原理样机存在的光学性能缺陷合并时,形变问题通过成像质量和参数变化对观测产生的间接影响亦不容忽视.望远镜光学参数变化导致两两EOA指向之间夹角变化的物理机制尚未完全明确,一种解释是光线在系统内的传播路径受镜片位移和形变的影响而变化[9],使EOA在靶面上的对应点发生位移,而归算时采用的对应点仍然是靶面中心点,这样会引起每个视场EOA指向的归算出现偏差.
以上的讨论对下一代PRM望远镜样机的研制具有宝贵的参考价值.采用焦距更长的望远镜可以有效解决星象空间分辨率和采样率不足的问题.对整个观测系统作一体化的定制设计,包括机械和光学两方面,将更好地控制形变的发生、减少光学误差的影响.除了已经确认存在的问题外,还可以适当增加辅助监测措施以进一步明确观测误差的性质,如实时检测倾斜和光学焦距变化等.
积累经验并更新设计从而助力在未来正式的月基观测中实现预期的观测精度和科学目标,这正是本代原理样机研制和地面验证实验的目的所在.
致谢感谢国家天文台兴隆观测站对原理样机观测工作的支持.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
中国光学(2021年6期)2021-11-25 07:48:32
装备制造技术(2020年4期)2020-12-25 05:26:04
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:38
动漫星空(兴趣百科)(2019年11期)2019-11-05 08:26:26
中国医疗设备(2019年1期)2019-01-15 12:10:54
数学物理学报(2018年1期)2018-03-26 08:16:37
时代农机(2016年6期)2016-12-01 04:07:20
诗林(2016年5期)2016-10-25 06:24:48
环境科技(2015年4期)2015-11-08 11:10:40