基于物理融合的联合仿真技术研究
2021-04-29 03:31艾凤明冯首鸿梁兴壮李伟林林秦州
电气工程学报 2021年1期
艾凤明 冯首鸿 梁兴壮 李伟林 林秦州
(1.中国航空工业集团公司沈阳飞机设计研究所 沈阳 110035;2.西北工业大学自动化学院 西安 710129)
1 引言
功率硬件在环仿真(Power hardware-in-theloop,PHIL)系统主要由数字仿真器、物理仿真系统(真实负载)和功率接口三部分组成,功率接口则由功率放大器和采样、调理组成。数字仿真器和物理仿真系统的技术都很成熟,对PHIL 仿真的研究关键在于功率接口。不同的PHIL 仿真应用,往往需要不同的功率接口设计,以匹配物理仿真系统,并确保仿真结果的准确性。这类研究主要是针对PHIL仿真的实际应用。此外,受到硬件性能的限制,功率接口往往不是理想的,非理想功率接口对于仿真系统整体稳定性的影响亦是PHIL 仿真研究的主要内容之一,这类研究主要是PHIL 仿真的理论研究。
文献[1]中,WU 等在实时仿真器中设置了戴维南等效电压源模型,通过功率接口连接了真实的串联阻感负载(代表感应电动机),组成了PHIL 仿真系统,虽然该系统的结构非常简单,但该文证明,用不同的等效边界条件设计功率接口时,仿真系统的精度是不同的,这引出了PHIL 仿真的接口算法问题。接口算法对PHIL 仿真的准确性至关重要,文献[1]分析了KUFFEL 等[2]和DMITRIEV-ZDOROV[3]提出的5 种现有的接口算法,并提出了一种基于时变一阶算法(Time-variant first-order approximation,TFA)的改进型接口算法。
在理论研究方面,REN 等[4-6]通过对PHIL 系统各环节传递函数的建立,对PHIL 仿真由于接口非理想特性引起的稳定性问题进行了研究,比较了不同接口算法下仿真的准确性,并给出了PHIL 仿真误差理论上限的计算方法;清华大学的陈磊等[7-11]对数模混合仿真系统的结构和时序进行了详细分析,首先对现有的几种接口算法进行了综述,并推导了其中4 种接口算法的统一数学表达形式,基于离散动态模型的相关理论,将混合仿真理解为一种数值方法,对电力一次系统的数字物理混合仿真稳定性进行了系统的研究;文献[12-16]则在不同的实际应用中分析了接口算法及接口延时对简化系统的稳定性的影响,并针对性地提出了一些补偿措施。
综合来看,目前对PHIL 仿真接口算法和PHIL系统稳定性的研究还不够系统,主要以仿真实验为主。其在理论分析上还没有较为统一的形式,其分析过程或对系统极其简化使得结论失去实际意义,或是过于追求数学形式的统一和方法的复杂性,不容易在实际工程中参考和应用。因此,有必要考虑实际的PHIL 仿真中非理想功率接口对于仿真系统整体稳定性的影响,研究适合于工程实践的系统稳定性分析方法。
2 功率硬件在环仿真的结构与接口算法
功率硬件在环(PHIL)仿真的本质思想就是利用电路理论中的替代定理,将原始系统分成了数字仿真子系统和物理仿真子系统,它们之间通过接口系统进行连接,在数字仿真子系统中用接口系统等效物理仿真子系统,在物理仿真子系统中用接口系统等效数字仿真子系统,使得PHIL 仿真系统与被仿真的原始系统满足相同的数学模型。
实际应用中,数字仿真子系统往往由实时数字仿真器实现,负责仿真含有发电机、变压器、线路、负荷等具有比较准确数学模型的大型系统,借助实时数字仿真器的强大的运算能力,能够实时地解算这些大型系统的离散状态方程,并将需要输出的变量交给和实时数字仿真器深度整合、拥有极低延迟的I/O 系统进行输出;物理仿真子系统则由真实的实物元件构成,用以对系统内一些难以准确数学建模的部件进行物理的动模仿真;物理仿真子系统的接口电流是实际功率流,由接口系统中的电流测量单元采集后输入实时数字仿真器的A/D,变成信息流,用以控制数字仿真子系统中理想受控电流源;数字仿真子系统的接口电压是信息流,则由实时数字仿真器的D/A 输出给外部的电压型功率放大器,经过功率放大后变成功率流,再加载在物理仿真子系统上,形成能量的交换,整个功率硬件在环仿真系统的结构如图1 所示。
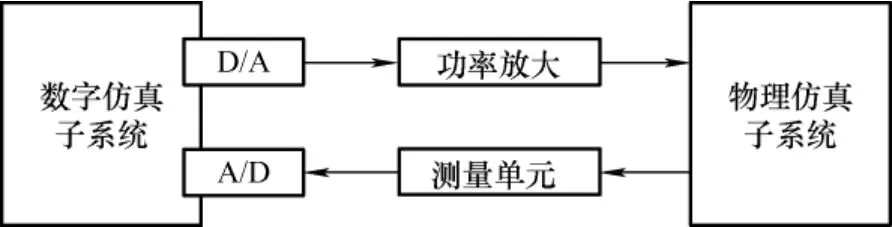
图1 功率硬件在环仿真的系统结构
在使用替代定理,将原始系统分割成等效的数字仿真子系统和物理仿真子系统时,不同的边界替代形式即对应了不同的接口算法。因为应用的接口算法不同,仿真系统的稳定性和准确性也会不同。5种常见的接口算法包括:理想变压器模型法(Ideal transformer model,ITM)、时变一阶近似法、传输线模型法、阻尼阻抗法和部分电路复制法。电流型理想变压器模型法如图2 所示,它是构建PHIL 系统最方便、也是最直接的接口算法之一。
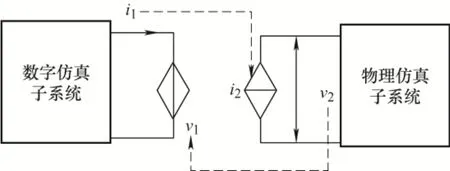
图2 电流型理想变压器模型法
典型的单输入单输出(Single input single output,SISO)电气系统如图3 所示,引入部分实物构建PHIL 仿真时,需要选择供电网络中的一个支路进行切割,将原始系统分为两个子系统,其中一个子系统含有电源和一部分供电网络,作为数字仿真子系统;另一个子系统含有用电设备和另一部分供电网络,作为物理仿真子系统。

图3 典型SISO 电力系统
对该SISO 电气系统使用ITM 接口算法构建的PHIL 系统如图4 所示,在数字仿真子系统中用一个受控电流源替代物理仿真子系统,受控电流源的控制信号来自物理仿真子系统的接口电流,在物理仿真子系统中则用一个受控电压源(电压型功放)来替代数字仿真子系统,电压型功放的输入信号来自于数字仿真子系统的接口电压。本文以图4 所示系统为例,对PHIL 仿真系统稳定性进行研究。
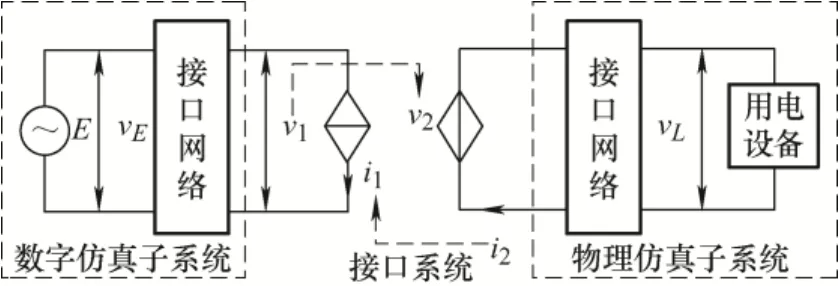
图4 理想变压器模型接口
3 功率硬件在环仿真的稳定性研究
数值意义上的功率硬件仿真稳定性问题主要在于其延时系统的稳定性问题。由于接口不理想(放大通道比例系数不为1,反馈通道比例系数也不为1,且都有延迟),所以构成的延时系统不同于原系统,其稳定性可能发生变化。
就电气系统而言,实现系统开环稳定是相对容易的,接口算法的设计则主要决定了接口稳定性,对于数字侧、物理侧、接口三方面联合起来的系统,要讨论其稳定性将变得非常复杂,需要针对性地做一些简化。根据图4,数字子系统中电源E和其部分接口网络是耦合的,物理子系统中用电设备和其部分接口电路也是耦合的,即有

式中,f1为数字侧的接口方程;f2为物理侧的接口方程;vE为网络接口处电压;vL为用电接口处电压;v1、v2、i1、i2分别为接口系统电压电流。
如果能将数字侧(物理侧)系统与它们的接口解耦,即有接口解耦假设。则对系统整体稳定性的分析就能和对接口稳定性的分析统一起来,并且得到简化。
对于线性电路系统,总可以从中取一个支路,使用替代定理将其简化为理想电压源(电流源)和等值阻抗组成的网络[17-19],最终,可以将整个系统表示为一个有源一端口网络。对于图3 所示的原系统结构,将电源和部分接口电路等效为戴维南电路,即由理想电源ES和“数字侧等效阻抗”ZS串联的组合代替,而用电设备则和部分接口电路合并为一个“物理侧等效阻抗”ZH。经过等效处理后的原系统及其PHIL 系统如图5 所示。
此时,原系统电路是一定稳定的,但加入接口后的PHIL 系统不一定稳定。基于PHIL 仿真的串行时序进行分析,假设tk时,电压2v在放大过程中,由于物理侧受控电压源的不稳定因素造成一个误差ε,即Δv2=ε。因为,则
经过更新后的物理侧接口电流被采集回数字侧,由于v1=ES-Z Si1且 Δi1(tk)=Δi2(tk)=ε/ZH,则有
式中,ZH为用电设备侧和部分接口电路合并的“物理侧等效阻抗”;ZS为“数字侧等效阻抗”。
即数字侧在下一个仿真步长后更新的v1(tk+1)值中含有上一个仿真步长的误差ε,且放大系数为-(Z S/ZH)。显然,如果Z S/ZH> 1,误差将会被不断放大,最终导致系统整体的不稳定。由于系统整体已经被解耦简化,可以得到图5b 系统的传递函数模型如图 6 所示,其中TS=-ZS,TH=1/ZH,TF=exp(-sΔt),TB=1。

图6 PHIL 系统的传递函数模型
由图6 可以求出系统整体的开环传递函数为

当系统应用电流型ITM 接口算法时,系统的传递函数模型仍为图 6,不同的是TS=-1/ZS,TH=ZH,则使用电流型ITM 接口算法的PHIL 系统开环传递函数为

此时,如果Z H/ZS> 1,误差将会被不断放大,系统将会不稳定。即当ZS和ZH都是纯电阻时,通过绘制可以得到系统开环传递函数的Nyquist 图是一个半径为Z S/ZH、圆心为零点、圈数为无穷多圈的圆形,此时系统稳定的条件为

即物理侧等效阻抗ZH不能小于数字侧的等效串联阻抗ZS。
4 电流源并联阻抗的影响分析和补偿方法
为了提高PHIL 系统的稳定性,可以添加并联阻抗与数字侧受控电流源并联。添加并联阻抗RD后的PHIL 系统结构如图7 所示,可以看出其改变了数字侧系统的接口网络结构,根据之前对接口和系统整体稳定性的分析,添加并联阻抗RD将影响PHIL 系统的稳定条件。

图7 添加并联阻抗RD 后的PHIL 系统结构
根据图7 所示的PHIL 系统结构,可以写出其接口的信号方程为
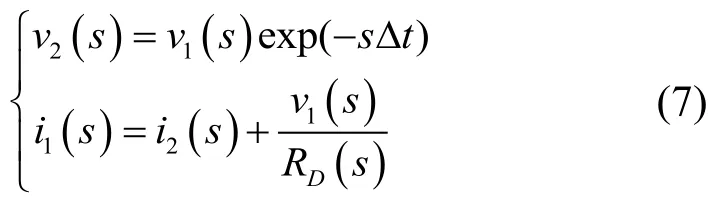
式中,v1为数字侧端口电压;v2为物理侧端口电压;i1为数字侧端口电流;i2为物理侧端口电流;ZS为数字侧等效阻抗;ZH为物理侧等效阻抗;RD为并联阻抗。
设TF=exp(-sΔt),其系统的传递函数结构如图8 所示。
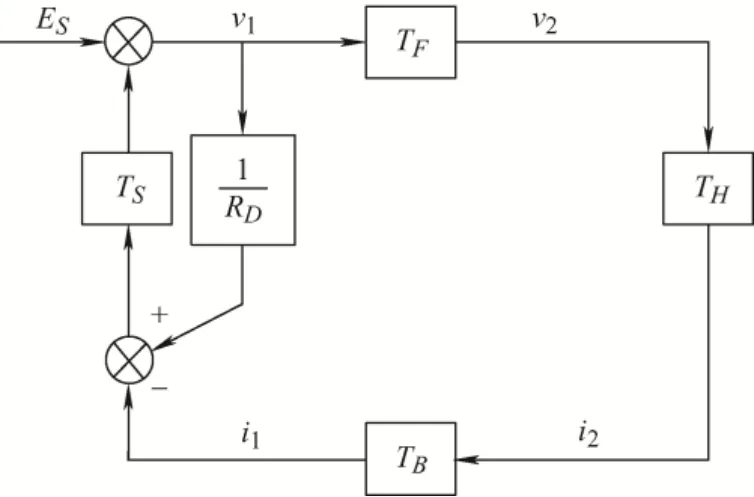
图8 添加并联阻抗RD 后的系统传递函数模型
为求系统的闭环传递函数v2(s)/E S(s),可以写出一条信号通路如下
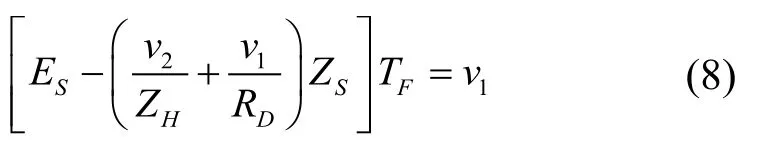
整理可得系统的开环传递函数
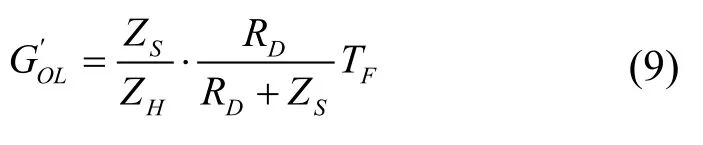
可见,增加了受控电流源的并联阻抗RD后,系统的开环传递函数与之前推导的结果式(4)相比多了一项RD/(RD+ZS),系统的稳定条件改变,此外,RD在数字侧电路中起到了分流作用,这导致PHIL系统的仿真结果和原电路产生差异。
因为RD/(RD+ZS) < 1,所以可以得到其对应关系,这说明使得系统稳定的数字侧、物理侧等效阻抗ZS、ZH的取值范围得到了扩展,在一定范围内,即便ZS>ZH,系统仍能保持稳定,即系统稳定性得到了提高,但RD的分流作用也会导致仿真结果的不准确。大多数情况下,因为ZS≪ZH,系统的稳定性较强,此时可以使RD取一个较大的值,此时RD/(RD+ZS) ≈ 1,可以认为系统不受RD的影响;但当ZS和ZH比较接近,需要借助RD提高一些系统稳定性时,可以在稳定性和仿真准确性之间做一些权衡,适当减小RD的取值。
针对引入RD对系统稳态误差带来的问题,可以在受控电流源的控制信号中引入补偿来抵消RD带来的分流影响,同时保持对系统稳定性扩展的贡献。
对图6 所示的PHIL 系统,RD带来的分流效果主要是v1/RD,将数字侧受控电流源的控制信号设置为i1=i2-v1/RD,这样将抵消RD带来的分流效果,使得加入RD不会对系统仿真结果产生影响,但这一补偿同时也去除了加入RD对系统稳定性的影响,系统的稳定条件不会扩展,因此,将数字侧受控电流源的控制信号改为i1=i2-v2/RD,此时系统方程不变,接口的信号方程由式(7)变为
其系统的传递函数结构图如图9 所示。
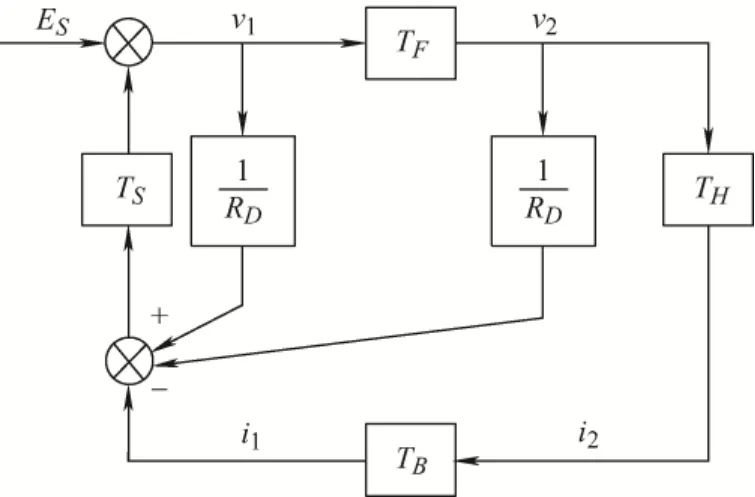
图9 加入i1 =i2 -u 2/ RD 的补偿后的系统传递函数模型
对图9 所示的系统结构图进行变形,将引出点右移,对并联的环节进行合并,合并后的系统传递函数模型如图10 所示。

图10 对并联的环节进行合并后的系统传递函数模型
整理可得系统的闭环传递函数v2(s)/E S(s)

将等号右边写为G/(1+G)的形式
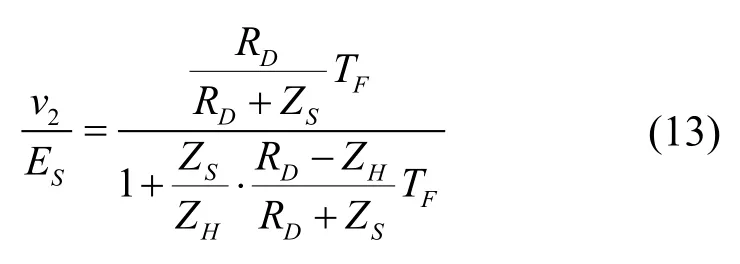
可得系统的开环传递函数

根据式(14)可知,增加了受控电流源控制信号的补偿后,系统的开环传递函数与原始电路的开环传递函数相比多了一项(RD-ZH)/(RD+ZS),系统的稳定条件改变,与不加入补偿的系统开环传递函数相比也有变化。由于补偿的电流和RD分流的电流相抵消,因此系统仿真的稳态结果将不受RD分流的影响。
当系统中各阻抗均为纯电阻电路时系统的稳定条件为

因为(RD-ZH)/(RD+ZS) < 1,且(RD-ZH)/(RD+ZS)<RD/(RD+ZS),因此系统扩展稳定性的范围比单独加入RD时更广一些。
5 仿真结果分析
使用Simulink 对理论进行仿真验证,对图7 中的PHIL 系统进行电路仿真,模块搭建如图11a 所示,同时搭建加入i1=i2-u2/RD的补偿后的系统仿真模型。

图11 PHIL 系统Simulink 仿真模型
其中数字侧等效电源为理想直流电压源,电压10 V;数字侧等效阻抗ZS=1Ω;电流源并联阻抗RD=5 Ω,理想延迟环节延迟10 ms;物理侧等效阻抗ZH=0.9 Ω。由此可以得到补偿前后PHIL 系统与原始电路仿真结果如图12 所示。

图12 补偿前后PHIL 系统与原始电路仿真结果
图12a中,根据系统在没有RD时的稳定性分析,此时ZS>ZH,系统不稳定,加入RD后,,系统将稳定。此时系统稳定,仿真结果在若干个延迟周期后收敛至稳态,系统稳定性得到一定程度的提高,但受RD分流的影响,系统的稳态解和原始电路的稳态解存在一定误差。图12b中,根据系统在没有RD时的稳定性分析,当ZH=1.1 Ω 时,Z S<ZH,系统稳定,当ZH=0.9 Ω 时,Z S>ZH,系统不稳定;加入RD,且受控电流源的控制信号中加入-u1/RD的补偿后,仿真的准确性、系统的稳定性都将不受到RD的影响。
6 结论
受到硬件性能的限制,功率接口往往不是理想的,非理想功率接口会对PHIL 仿真系统整体稳定性产生重大影响。本文重点研究了使用理想变压器接口算法的PHIL 仿真系统在等效阻抗为纯电阻电路情况下的系统稳定性判断方法,得到如下结论。
(1) PHIL 系统在加入并联阻抗后增加系统稳定性的同时会带来分流的影响,导致系统的稳态解和原始电路的稳态解存在一定误差。
(2) 在受控电流源的控制信号中引入补偿信号的方法可以在抵消并联阻抗带来的分流影响的同时保持对系统稳定性扩展的贡献,为实现不同系统的联合仿真,解决大系统集成仿真难题提供一定的方向和思路。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
北京航空航天大学学报(2022年7期)2022-08-06
灌溉排水学报(2022年6期)2022-07-13
软件(2020年3期)2020-04-20
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
演艺科技(2017年1期)2017-03-09
中国集体经济(2017年1期)2017-01-04
电脑知识与技术(2016年3期)2016-04-07
现代计算机(2011年11期)2012-01-09