七通道抗干扰GNSS接收机射频前端设计*
2021-04-24 06:24周建政裴山会曾敏慧
电讯技术 2021年4期
周建政,李 莉,侯 杨,裴山会,曾敏慧
(中国电子科技集团公司第四十三研究所 微系统安徽省重点实验室,合肥 230088)
0 引 言
全球卫星导航系统(Global Navigation Satellite System,GNSS)能够为用户提供高精度的定位、测速、导航和授时等服务,近年来得到了飞速的发展与广泛应用,成为了促进和推动社会经济发展的助推器,更是国防安全的重要保证。但目前的GNSS均存在一些共性问题:卫星下行发射功率低,到达接收机天线的功率仅约-133 dBm[1];空中电磁环境比较复杂,存在各种潜在的或人为的干扰因素,有时干信比可达85 dBc;导航信号的频率、调制方式和信号格式都是公开的、固定不变的,易受到人为干扰影响;普通GNSS接收机自身的抗干扰裕度较低,无法对抗强干扰。以GPS(L1)、BDS(B3)D1导航电文、BDS(B3)D2导航电文民用码为例,接收机的初始抗干扰裕度分别仅约26.86 dB、23.86 dB和13.86 dB,在实际应用中一台发射功率为瓦量级的小型干扰机就足以使几十公里范围内的民用接收机无法正常工作[2]。
近年来,GNSS抗干扰技术的研究深受国内外诸多学者的青睐,主要体现在三个方面[3]:星上抗干扰技术、辅助抗干扰技术及接收机抗干扰技术等。其中,星上抗干扰技术主要体现在卫星的有效载荷,信号体制的设计上。以GPS为例,2018年提供服务的GPS-IIIF在星上抗干扰技术就实现了突破与优化,如增加了信号可靠性等[4]。辅助抗干扰技术主要包括伪卫星技术和组合导航技术等。如文献[5]利用伪卫星技术解决了室内卫星信号受限而无法定位的问题。惯性导航系统与GNSS组合是目前最常用的组合导航技术。实验表明[6],采用深组合系统相对于普通接收机或无辅助的组合导航结构,抗干扰性能可以提高 10~20 dB。近年来,GNSS/无线通信基站组合技术也在一定程度上提高了室内导航信号的质量。
接收机抗干扰技术主要指导航接收机对抗强射频干扰,是目前GNSS抗干扰的主要研究方向。近年来,发展出了不少的抗干扰方法[7]。接收抗干扰技术本质上是利用导航信号与干扰信号之间的信号特征(如振幅、频率、时间、空间或极化作用等)差异来完成信号与干扰的分离,从而实现干扰抑制。如基于单天线的信号处理抗干扰技术,由于采用单天线,不具备空间分辨能力,只能依靠时域抗干扰技术和变换域抗干扰技术等来处理某些具有时频稀疏性的干扰,对多个干扰处理能力不强[8]。而基于天线阵的抗干扰技术主要有空域抗干扰技术和空时自适应处理技术。其中,空域抗干扰技术根据其实现方式的不同可分为空域自适应滤波技术(也称自适应零陷技术)和波束形成技术。但是,目前 GNSS 抗干扰技术的研究[9-13],一般针对某些特定类型的干扰展开,尚无通用的可以抑制多种类型干扰的抗干扰技术。
为适应复杂电磁环境应用的需求,级联/组合不同类型抗干扰技术的研究具有重要意义。同时,随着各大导航系统的不断发展,导航卫星数据大幅增加,多标准兼容的GNSS接收技术也是一种极为重要的组合导航抗干扰技术,也是技术发展的必然。
本项目研制了一款七通道抗干扰GNSS接收机,旨在利用多模组合导航抗干扰技术及级联/组合空域、时域与频域等多重抗干扰技术来应对复杂电磁环境应用的需求。
1 设计要求
本GNSS接收机的功能框图如图1所示,其具有BDS(B3)抗强干扰模式、BDS(B3)普通导航模式和GPS(L1)普通导航模式三种工作模式。为简洁起见,本文中将BDS(B3)和GPS(L1)分别简称为B3和L1,在射频前端部分分别对应B3七通道抗强干扰下变频、B3单通道普通导航模式下变频及L1单通道普通导航模式下变频。因篇幅所限,本文将重点介绍其中GNSS接收机射频前端部分的抗干扰技术相关的研究成果,其他内容不作详述。
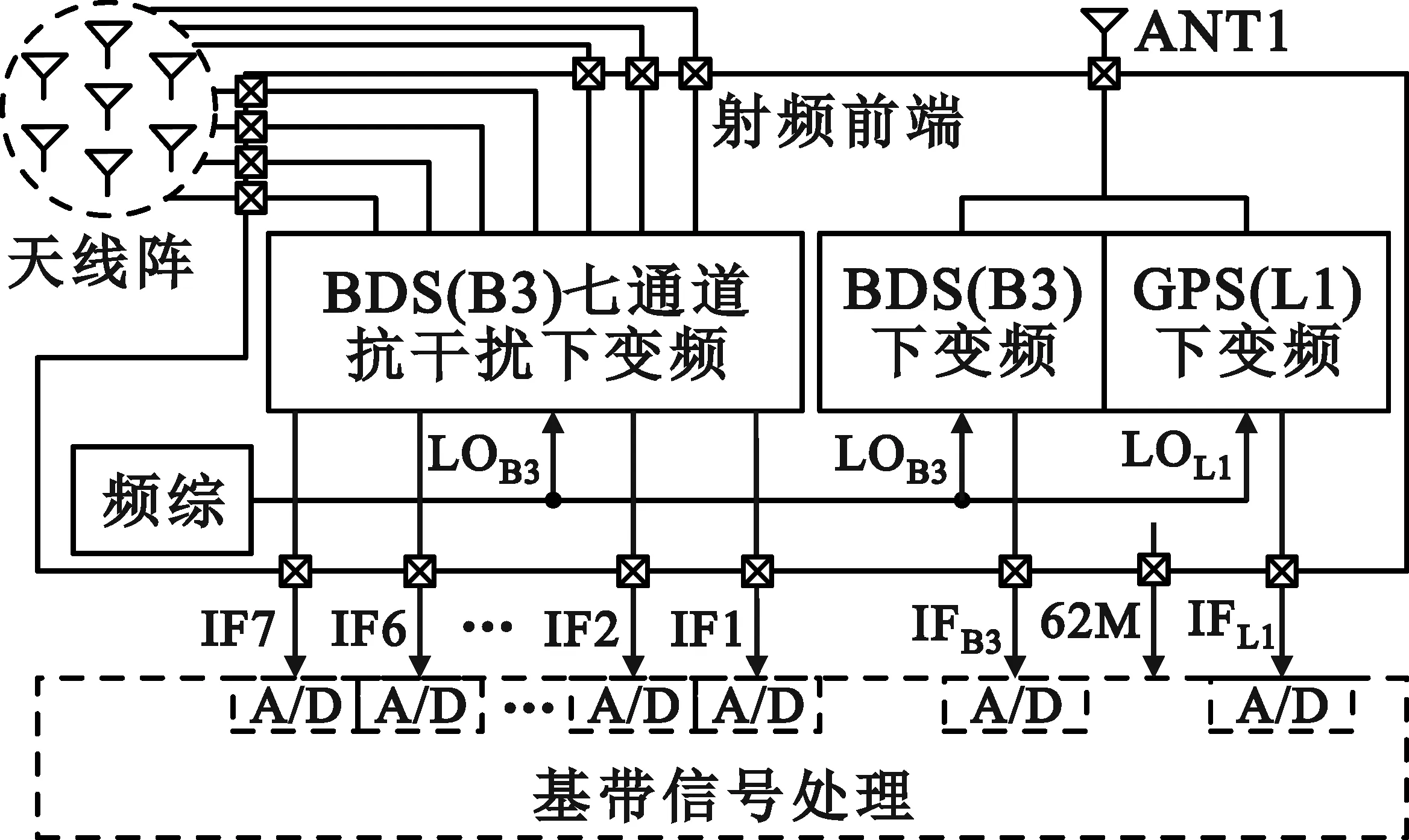
图1 本射频前端的功能框图
本射频前端的抗干扰相关的主要指标如下:
B3抗强干扰模式下变频部分最大干信比(RJS,max)85 dBc;输入1 dB压缩点(IP1dB)≥-30 dBm;通道间隔离度(ISO)≥52 dB;镜像抑制(RIM)≥60 dBc;通道间匹配性≤±1.0 dB,≤±10°@fc;带外抑制≥40 dBc@fc±15.5 MHz或≥70 dBc@fc±20.8 MHz。
B3/L1普通导航模式下变频部分最大干信比(RJS,max)50 dBc;带外抑制≥40 dBc@fc±15.5 MHz(对于B3和L1),或≥70 dBc@fc±20.8 MHz(对于B3),或≥70 dBc@fc±29.75 MHz(对于L1)。
2 射频前端系统结构设计
本射频前端最终采用了如图2所示的固定本振一次变频超外差结构。其中B3抗强干扰下变频采用固定增益模式,B3/L1普通导航模式下变频采用自动增益控制(Automatic Gain Control,AGC)模式。

图2 接收机射频前端系统结构框图
3 导航接收机射频前端抗干扰设计
3.1 接收机抗干扰设计整体方案
接收机在实际工作中受到的干扰,不管是潜在干扰还是人为干扰,均可归为带内干扰或带外干扰,也可根据干扰信号带宽分为窄带干扰与宽带干扰。随着GNSS面临电磁环境复杂程度的增加,在不增加天线阵阵元个数的前提下,单独运用时域、频域、空域及空时域抗干扰技术时,其局限性越来越明显。因此,需要根据系统应用场景来设计抗干扰方法和指标。
本接收机中,为提高接收机对抗多种共存干扰的能力,采用了多域级联/组合抗干扰技术及多模组合抗干扰技术,并通过综合天线、射频下变频、数字基带处理等各阶段的特性来完成干扰抑制。
首先,利用天线阵数字波束形成技术,并根据卫星信号、干扰以及多径的不同空域特征自适应地调整阵列加权,使阵列方向图形成指向有用信号方向的主波束,并在干扰或多径方向产生“零陷”,达到增强有用信号、抑制与有用信号方向不同的各类干扰及多径的目的,即实现空域滤波。其对带外干扰与带内干扰均有效,对窄带干扰与带宽干扰亦均适用,但其无法区分和期望信号来向相同或者相近的干扰信号。
然后,通过频域滤波来抑制进入接收系统的窄带带外干扰,但由于其不适用于带内干扰与宽带干扰,故需要射频前端具有良好的线性度来提高接收机的抗干扰能力。
最后,对于进入系统的残余窄带干扰,利用窄带干扰信号和GNSS信号在时域相关性方面存在的巨大差异,用时域滤波技术来做进一步的抑制。由于时域滤波主要是在基带完成,本文中不作详述。
由于本系统中综合了空域滤波、频域滤波和时域滤波三种技术,实现优势互补,因此可获得更佳的抗干扰性能。对于射频前端本身而言,抗强干扰通道的抗干扰性能取决于射频链路的线性度、带外抑制特性、通道匹配性和通道间隔离度等。而对于普通导航通道而言,借助于电路自身的线性度、带外抑制特性和AGC来获得一定的抗干扰能力。同时,通过多模组合抗干扰技术来提高导航接收机的整体抗干扰能力与可用性。
3.2 天线阵列设计
理论上N阵元天线阵列有N-1个自由度,最多产生N-1个零陷,可以抑制N-1个干扰[14]。同时,阵元数目越多,所形成的天线波束主瓣宽度会越窄。但是阵元数目越多,系统构成就会越复杂,设备造价就会越高,重量、体积和功耗都会加大。依据设计需求并对以上因素折中考虑,本项目中采用了如图1所示的七阵元均匀圆阵天线,在理想情况下可以将接收机的抗干扰能力提高至少40 dB[15]。
3.3 射频前端的高线性度设计
射频前端的高线性度是抗强干扰的前提条件,其必须保证在规定的应用场合中,前端各级器件在受到干扰的情况下依然能正常工作在线性状态,且中频输出功率满足ADC的输入电平要求。显然,射频前端的线性度指标要求取决于系统的抗干扰需求。
射频前端的线性度可用两项指标来描述:1 dB压缩点(P-1 dB)和三阶交调失真(IMD3)。其中,P-1 dB描述的是电路的大信号非线性特性。要求各级电路的输入总功率小于该级电路的IP1dB并留有一定裕量,以确保各级电路均工作在线性状态。而IMD3则描述的是电路的小信号非线性特性,表征接收机的非线性失真特性。系统要求当输入一对特定功率(即系统需要接受的最大干信比(RJS,max)对应的带内干扰信号功率)与频率间隔的双音信号,其产生的三阶交调项(PIM3)小于输出噪底(Nout)。该值表征了当接收机接收到一个小功率的输入信号时,在保证能够输出满足信号质量要求的信噪比的前提下,能容忍的最大带内干扰信号功率。因此,在导航接收机中需要重点考虑IMD3指标。
已知
IMD3(d)=Pout-PIM3。
(1)
式中:Pout是输出信号功率。经推导,可得
Pin,max=(2OIP3-3G+Nout)/3=
(2OIP3-2G+KTBRF+NF)/3
(2)
式中:Pin,max是最大输入信号功率,OIP3是射频前端的输出三阶交调截点,G是链路增益,K是波尔兹曼常数,T是绝对温度,BRF为信号带宽,NF是射频前端的噪声系数。反之,可得
OIP3=(3Pin,max-KTBRF-NF]/2+G,
(3)
IMD3≥Pin,max-KTBRF-NF。
(4)
已知抗强干扰模式下RJS,max为85 dBc,普通导航模式下RJS,max为50 dBc,并设定NF=2.5 dB时,对于B3抗强干扰、B3普通导航模式和L1普通导航模式来说,理论计算需要IMD3分别大于等于53.25 dBc、18.25 dBc、28.25 dBc。实际工程设计中,IMD3的设计值还将留有一定裕量。
由于抗强干扰通道较普通通道具有高得多的线性度要求,限于篇幅,本文仅介绍抗强干扰通道的线性度设计。为方便讨论,在此将抗强干扰通道简化为图3所示模型。模型中标明了各级器件的特性,如增益、IP1dB及OIP3等,各节点的信号定义如表1所示。
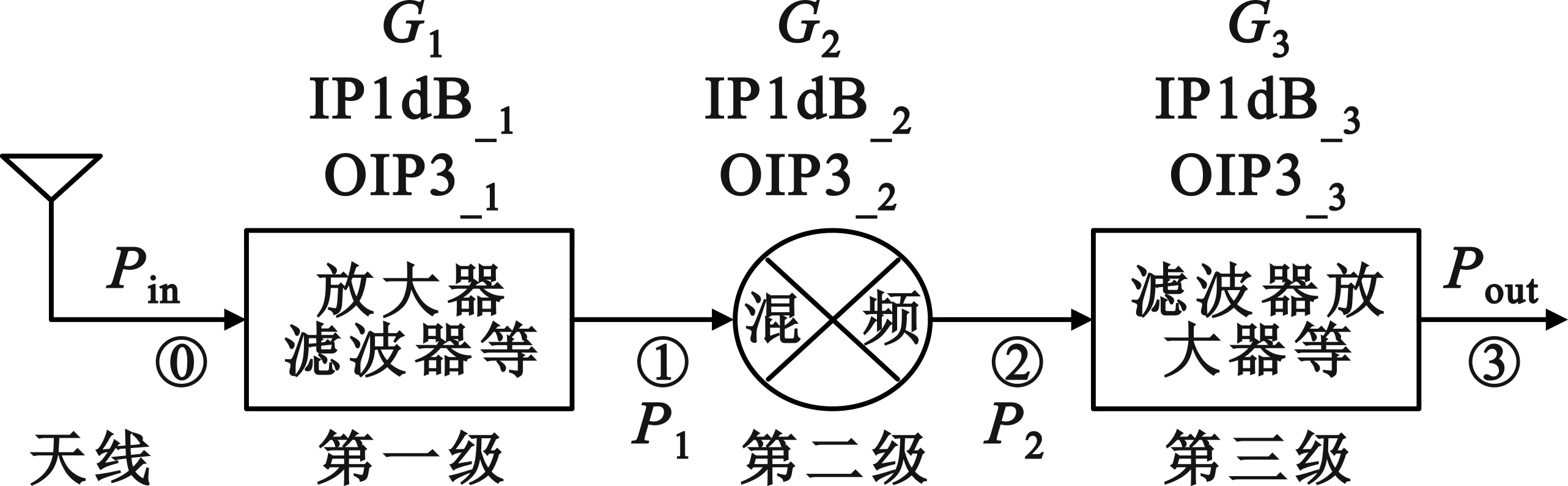
图3 抗强干扰通道简化模型[16]
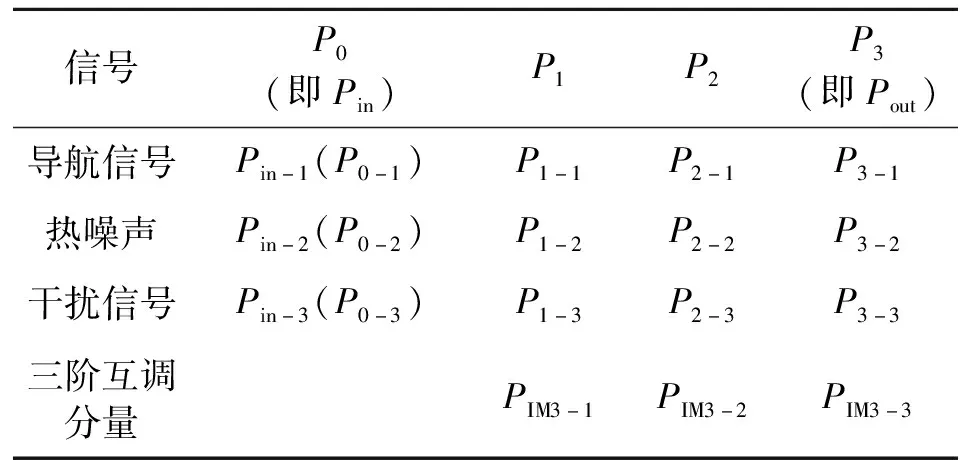
表1 模型中各节点的信号定义
在射频链路设计时,通常混频器的可选性较少,因此,先选定混频器,可得G2=-7.4 dB,IP1dB-2=21.0 dBm,OIP3-2=24.6 dBm。
下面推导第1、3级电路的线性度指标需求。
(1)对中频输出功率的限制。无干扰时,中频输出功率需大于A/D采样的最低信噪比要求的最低采样功率Pmin的i倍,即
Pin-2×G1×G2×G3≥i×Pmin。
(5)
存在强干扰时,为避免限幅失真,要求中频输出功率小于A/D满幅采样功率Pmax的1/j,即
Pin-3×G1×G2×G3≤Pmax/j。
(6)
已知所选ADC的Pmax=12 dBm,Pmin=-64.45 dBm,Pin-2=-103.75 dBm,Pin-3=-48 dBm,因此,得
i×j≤(Pin-1/Pin-3)/(Pmin/Pmax)=117.46=20.7 dB。
在满足系统线性度要求的前提下,为降低系统功耗,令j=12 dB,i=8.7 dB。
(2)为确保每一级电路均工作在线性状态,要求每一级的输入总功率较该级电路的IP1dB小5 dB。即IP1dB-l-P(l-1)-3≥5 dB,其中,l=1,2,3。
(3)为满足后端抗干扰处理对射频前端提出的信噪比要求[16],要求每一级输出的干扰产生的三阶交调分量(PIM3-l)较噪声功率(Pl-2)小ndB,即Pl-2-PIM3-l≥nl,其中,l=1,2,3。且三阶交调分量PIM3-l包括本级输入干扰信号产生的三阶交调分量和上一级产生的三阶交调分量经过本级放大后的输出。
令(Pout-Pnoise)=c,已知(Pout-PIM3)=IMD3,得(Pnoise-PIM3)=(IMD3-c)=n,其中Pout为输出干扰功率,c为某一常数。由于在射频链路中,越往后级,IMD3越小,则对应的n越小。在此,令n1=18 dB、n2=16 dB和n3=9 dB。
(7)
为方便计算,式(7)在以下计算中取“=”,且PIM3-0=0 mW。因此,有
(8)

(9)
可得
G3≤(Pmax-j-Pin-3-G1-G2)=13.44 dB。
由式(8)可得

(10)
由式(10)可得
由上述推导可知,在给定混频器时的线性度工程设计结果如表2所示。其中,第一级电路内部包含有两级放大器,其线性度指标分配方法同上,在此不再详述。
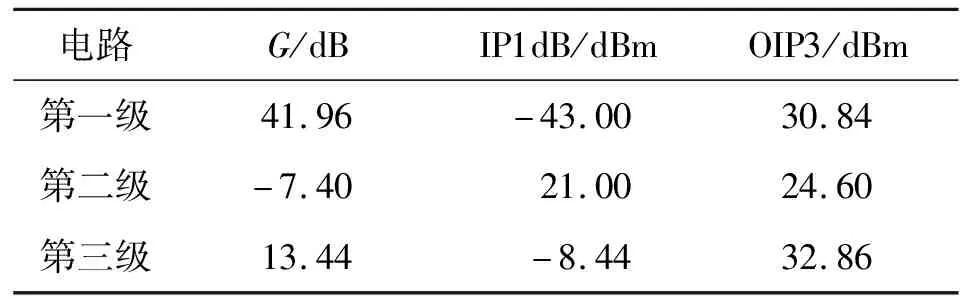
表2 在给定混频器时的线性度工程设计结果
3.4 射频前端的带外抑制规划
众所周知,射频前端的带外抑制特性主要由滤波器来决定。工程实践中,因缺乏合理的指导原则,往往将带外抑制指标提得很高,从而导致带外抑制指标存在过度设计,不仅会导致滤波器的体积、设计难度和成本增大,同时群时延和插损特性也会恶化,这显然不符合导航接收机对高精度、低成本的需求。因此,本射频前端的带外抑制规划就是在统筹考虑前端链路和器件本身,兼顾后端A/D采样和基带处理算法对前端提的要求,折中考虑带外抑制指标与群时延特性等基础上,根据整机应用需求,合理设计前端链路总的带外抑制指标,并将总的带外抑制指标合理地分配到链路的各级滤波器中。为此,从带外抑制的角度,将导航接收机一次下变频射频链路简化建模,如图4所示。其中,Pin-1、Pin-2和Pin-3分别为接收机射频前端接收到的导航信号功率、输入噪声功率、输入的带外干扰功率,单位均为dBm。

图4 航接收机一次下变频射频链路简化模型
下面,我们从几个方面来规划射频前端链路的带外抑制指标。
(1)带外干扰不能使射频前端各级器件饱和,即输入干扰功率应低于各级器件的IP1dBkdB,即
R1≥Pin-3+k-IL1-IP1dB-1,
(11)
(R1+R2)≥Pin-3+k+G1-(IL1+IL2)-IP1dB-2,
(12)
(13)
(2)接收机中频输出端的带外干扰功率低于带内噪声功率ndB,这是后端抗干扰算法对带外干扰功率提出的限制。
(3)防止中频采样混叠。由采样定理可知,理论上,抽样序列无失真地重建原始信号的前提是采样延拓边带之间永不重叠或交叉。但工程实践中,滤波器的矩形系数肯定大于1,延拓边带之间肯定会交叉,如图5所示。因此,需要控制这个交叉点电平与通带电平之间的差值,以对混叠带宽进行抑制,才能向基带输出满足信号质量要求的信号。
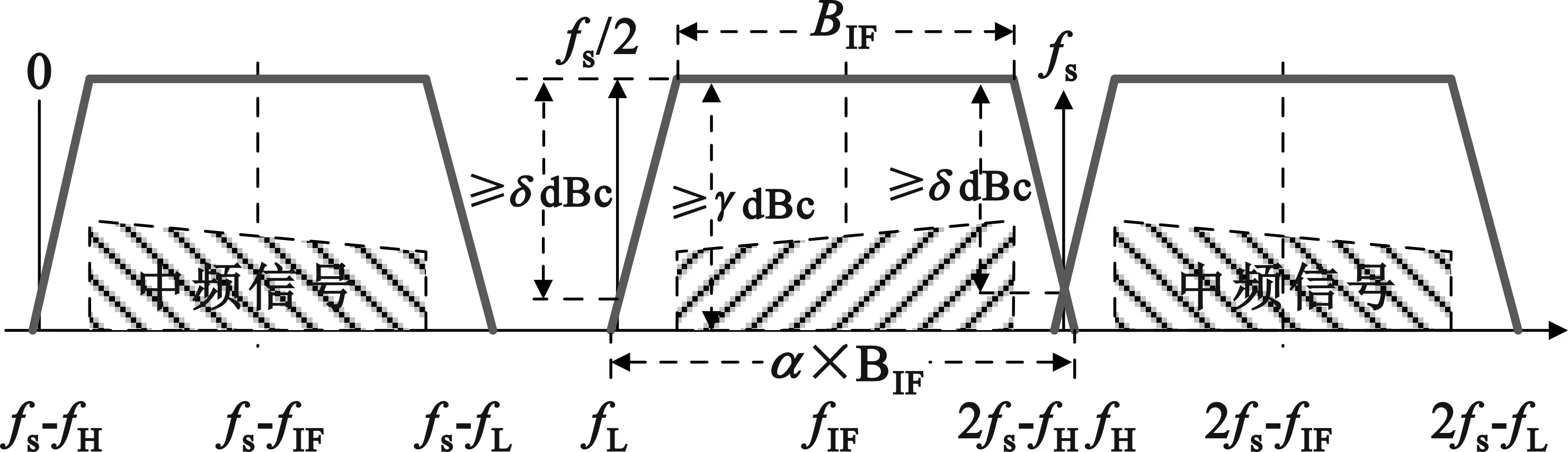
图5 中频采样混叠原理
在此,带外抑制至少可细化为两个具体要求:一是≥δ1dBc@f≤fs/2 &f≥fs;二是≥δ2dBc@f≤fs-fIF+B/2 &f≥2fs-fIF-B/2,其中fs是采样频率,fIF是中频信号的中心频率,BIF是中频带宽。
(4)对某些特定带外干扰的抑制要求,如接收机的镜像抑制大于ξdB。
(5)由于射频前端的群时延非理想特性会影响接收机的测量精度[17],因此,射频前端设计的通道带宽应大于信号所需宽度,使信号主瓣远离滤波器通带边沿,从而优化射频前端的群时延特性。
上述准则(1)~(5)即为接收机射频前端带外抑制规划的主要方法。根据本应用的实际情况,设k≥6 dB,δ1≥40 dB,δ2≥65 dB,ξ≥60 dB。
在进行系统带外抑制指标规划与分配时,不仅要考虑上述准则,还需折中考虑实际工程应用的其他情况,如各级滤波器的实现难度、体积与成本等。根据以上规划要求,将本项目中的滤波器带外抑制指标规划如图6~8所示。综上所述,理论上,本射频前端的带外抑制性能如表3所示。
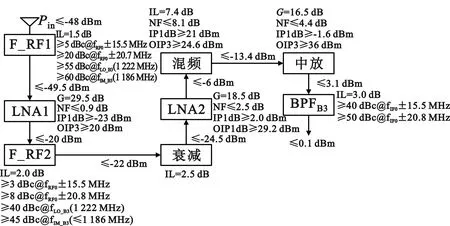
图6 B3抗干扰模式通道链路设计

表3 本射频前端的带外抑制性能预计
3.5 接收机射频前端链路设计
根据3.1~3.4节所述的理论分析与设计结果,可将该射频前端的链路设计如图7~9所示,其中B3抗干扰通道的链路性能预算如图9所示。普通导航模式通道的链路预算类似,不作详述。
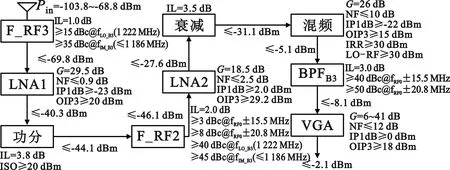
图7 B3普通通道链路设计
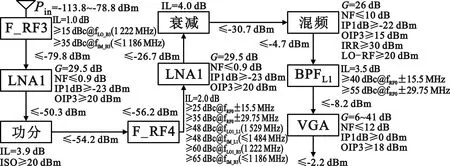
图8 L1普通导航模式通道链路设计
图9 B3抗干扰通道链路性能预算
3.6 其他与抗干扰特性相关的设计
(1)阵列通道失配是GNSS接收机数字波束形成技术在工程实现中必须要考虑的问题[18]。通道失配主要指通道间幅相一致性。在本产品设计过程中,尽可能地保持各通道器件、电路和版图等各方面设计的一致性,并辅助一定的幅相调试手段来保证通道间的良好匹配性。
(2)多通道间的信号泄露也会对抗干扰性能产生影响。由于系统对通道间隔离度的要求与三阶互调抑制参数的推算方式基本一致[2],本文不作详述。本产品中通道间隔离主要通过以下措施来实现:一是设计金属屏蔽腔来实现各通道间、各功能模块间的物理隔离;二是产品内部各功能模块采用独立供电,同时借助电源滤波、电源去耦、磁珠等来消弱因电源网络而引入的串扰;三是实现整个产品的输入/输出地与基板地的良好连接与连续。
4 产品实物及实测结果
产品实物照片如图10所示,部分核心技术指标的测试结果如图11~13所示,主要参数的实测结果如表4所示。
图10 产品实物照片

图11 B3抗干扰通道IMD3测试曲线

图12 B3抗干扰通道带外抑制测试曲线
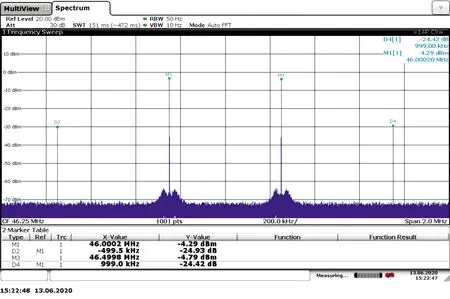
图13 B3普通下变频IMD3测试曲线
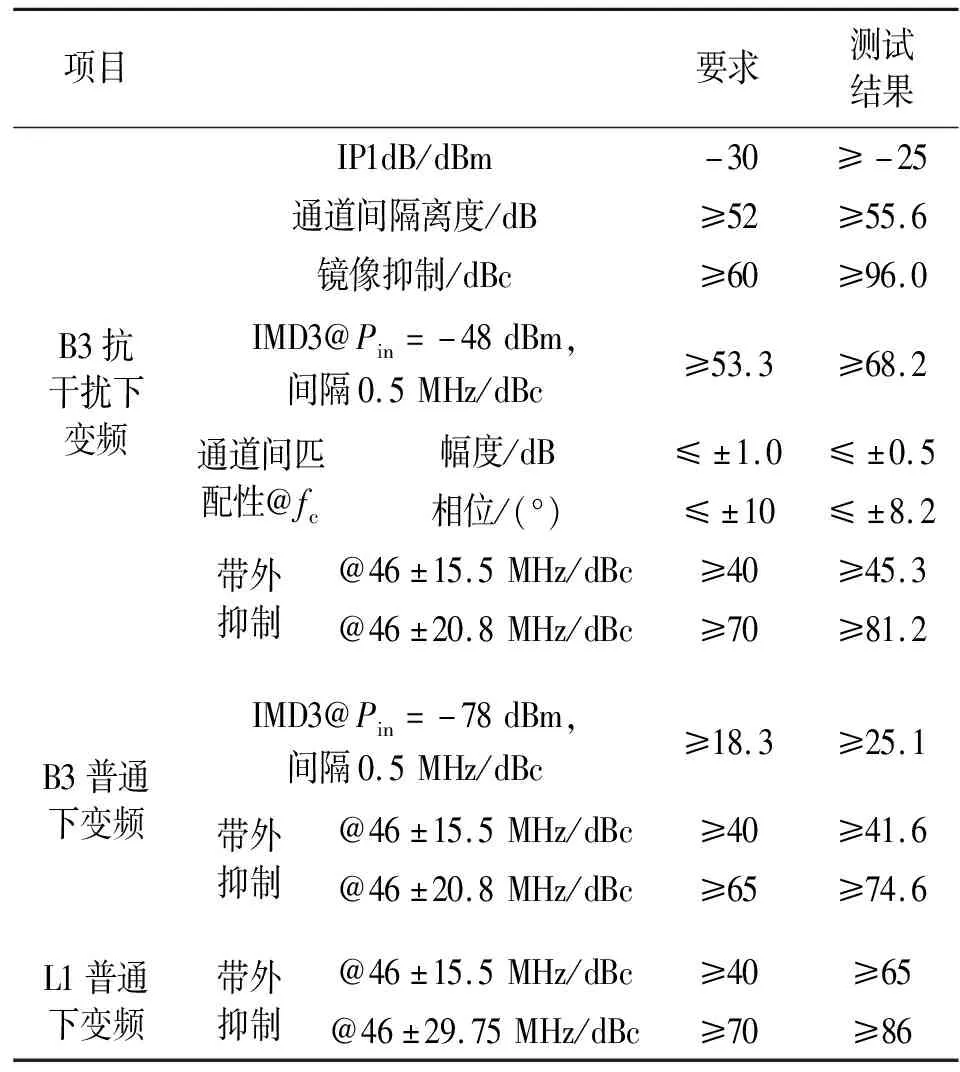
表4 产品主要参数的实测结果
根据图11所示测试结果与公式(2)可得,本产品的实际RJS,max达84.3 dBc,与设计预期(85 dBc)非常吻合,在设备的测试误差范围之内,而文献[15]中同类产品的RJS,max仅为65 dBc。
5 结 论
由于目前的GNSS普遍存在先天性抗干扰能力弱的缺陷。近年来,GNSS抗干扰技术的研究深受国内外诸多学者的青睐,也获得了很多的研究成果,但是目前的研究成果一般针对某些特定类型的干扰展开,尚无通用的可以抑制多种类型干扰的抗干扰技术。
在本文设计接收机中,为提高GNSS接收机对抗多种共存干扰的能力,采用了空域、频域及时域多域级联/组合抗干扰技术及多模组合抗干扰技术,并通过综合天线、射频下变频、数字基带处理等各阶段的特性来最大限度的提高系统的抗干扰能力。同时,通过理论推导,获得一套从需求分析反向推导最佳系统设计参数的设计方法。
基于本文设计方法设计的产品,通过投产和测试,测试结果与理论预计非常吻合,证明该套设计方法有效可行。与现有文献相比,本文的理论分析更为透彻,实用性、可操作性更强,并具有良好的普适性,对指导相关产品的设计具有理论指导与实用参考的意义与价值。通过该方法可设计出满足技术要求的高性价比产品,但是产品的抗干扰性能是否先进,并不取决于该设计方法,而取决于技术需求。若应用场合的电磁环境复杂,抗干扰需求提得高,相应产品的抗干扰能力水平就会高一些;若应用场合的电磁环境尚可,就不必将技术要求提太高。
值得说明的是,由于本接收机的应用场合电磁环境复杂,因此,对抗干扰能力提出了较高的要求,通过与同类产品对比,及整机试验测试,证明本产品的抗干扰能力具有一定的先进性。
猜你喜欢
移动通信(2021年5期)2021-10-25
航天电子对抗(2021年2期)2021-05-31
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
数字通信世界(2017年1期)2017-02-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
火控雷达技术(2016年3期)2016-02-06
现代防御技术(2014年1期)2014-07-10
中国交通信息化(2014年3期)2014-06-05