下肢骨盆控制康复机器人训练对脑卒中患者平衡功能和步行能力的影响
2021-04-10 09:58林在龙朱雯吴华顾旭东傅建明姚云海李辉李岩柏和风
浙江医学 2021年6期
林在龙 朱雯 吴华 顾旭东 傅建明 姚云海 李辉 李岩 柏和风
脑卒中后约3/4 的患者因肌力、肌张力的改变及异常运动模式致其步态稳定性下降,而步行是多关节和肌群的周期性协调运动,要求机体有足够的支撑能力与平衡能力[1]。骨盆作为人体承上启下的重要结构,对于脑卒中患者维持平衡功能和步行能力有着重要影响。下肢远端的肢体活动以近端的骨盆运动为基础,步行时,骨盆随人体运动产生周期性侧倾、旋转和水平移动,此时人体具有良好的协调与平衡功能。脑卒中患者因中枢神经系统损伤,骨盆的姿势控制系统被破坏[2],骨盆运动失去协调与平衡,从而影响下肢步行功能。以往步行训练侧重下肢运动功能训练而容易忽略骨盆控制对步态的影响,因而容易出现异常运动模式,治疗效果欠佳。近年来下肢康复机器人辅助步行训练越来越得到重视,其中下肢骨盆控制康复机器人训练使步行中骨盆得到良好的控制,可有针对性地纠正偏瘫侧下肢异常运动模式[3]。因此本研究应用下肢骨盆控制康复机器人对患者的步行训练进行干预,观察该方法对脑卒中患者平衡功能和步行能力的影响,现报道如下。
1 对象和方法
1.1 对象 选取2016 年3 月至2017 年3 月嘉兴市第二医院康复医学中心收治的脑卒中患者50 例。纳入标准:(1)首次脑出血或者脑梗死并经头颅CT 或MRI 检查证实;(2)有肢体功能障碍并已给予常规康复训练者,患者下肢Brunnstrom 分期为Ⅱ期以上;(3)年龄<65岁;(4)生命体征稳定,血压控制在正常范围内,心功能良好者;(5)意识清醒,愿配合康复治疗者;(6)患者病程均<12 周,血压控制在正常范围,无心肌梗死、心绞痛等发作,心功能良好,无其他限制活动的合并症。所有患者均知情同意,本研究经本院医学伦理委员会批准。采用随机数字表法将所有患者分为实验组和对照组,每组25 例,两组患者一般资料比较差异均无统计学意义(均P >0.05),见表1。
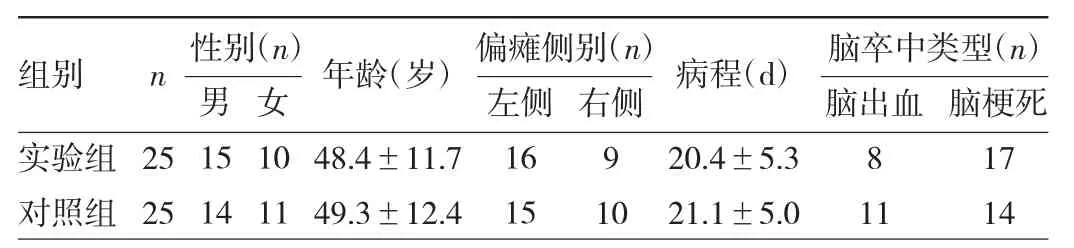
表1 两组患者一般资料比较
1.2 治疗方法 两组患者均给予常规药物治疗和康复训练,包括髋膝踝关节控制训练、肌力训练、桥式训练、翻身训练、坐-站位转移训练、站立平衡训练、单腿负重训练、上下楼梯训练、迈步步行训练等[4];其中对照组患者训练每次50 min,1 次/d,5 次/周,为期8周,实验组患者训练每次30 min,1 次/d,5 次/周,为期8周。
实验组患者在常规康复训练基础上增加由上海电气集团股份有限公司研发的下肢骨盆控制康复机器人辅助步行训练,每次20 min,1 次/d,5 次/周,为期8 周。该机器人由跑台、骨盆减重控制装置和操作平台组成,通过可调节的骨盆控制装置和运动跑台,帮助患者主动或在部分辅助下模拟正常人行走时的骨盆运动角度和步态周期进行训练;训练前治疗师向患者说明跑台工作方式及注意事项,然后患者通过台阶转移至跑台上,将骨盆控制装置根据其身高调整至合适高度,将减重腰带通过腹股沟将患者骨盆部分进行固定,通过电脑平板设置减重量(根据体重10%~20%)、步行速度、训练时间等参数,启动跑台进行步行训练,治疗师在患侧指导患者进行迈步,根据需要治疗师可用手控制患者踝关节抑制患足内翻改善廓清障碍;其中不同康复阶段的患者可制定不同的训练模式,包括步速(一般从低速开始0.2 km/h),骨盆的旋转、侧倾、水平位移幅度范围、训练时间以及减重量等参数。
两组患者在训练过程中若出现头晕、心率加快,血压波动等呼吸、循环系统反应,应立即中止训练并给予相应处理,训练过程均在治疗师监控安全前提下进行。
1.3 疗效评定方法 两组患者在治疗前1 周先对观测指标进行基础测评,再于治疗8 周后对观测指标进行测评,以评定疗效。(1)采用Rivermead 运动指数(RMI)评分评定患者翻身、转移、上下楼梯、独立行走、跑步等15项日常生活活动能力,能完成得1 分,不能完成得0 分,总分15 分[6];(2)采用Berg 平衡量表(Berg balance scale,BBS)评定平衡功能(总分56 分),分值越高平衡功能越好;(3)采用功能性步行量表(FAC)分级对患者下肢步行能力进行评定,0 级:不能行走或>1 人扶持下步行;1 级:需在1 人减重扶持下步行;2 级:需间断肢体接触帮助下步行;3 级:需在他人监督及口令指导下步行;4 级:在平坦地面上能独立步行,但在上下楼梯时需帮助;5 级:完全独立步行[5];将3~5 级患者归为具有独立步行能力,计算独立步行百分比;(4)采用广州章和电气的Gait watch 步态分析系统采集步长、步频、步速数据进行评估,将3 块传感器分别绑在患者髋、膝、踝部,嘱患者自然状态下完成12 m 直线距离的行走,数据同步上传于电脑形成步行曲线图和动态三维图,治疗师从中提取主要参数进行数据比较[7]。
1.4 统计学处理 采用SPSS 17.0 统计软件。计量资料以表示,组间比较采用两独立样本t 检验,组内治疗前后比较采用配对t 检验;计数资料用率表示,组间比较采用χ2检验。P<0.05 为差异有统计学意义。
2 结果
2.1 两组患者治疗前后RMI 评分比较 两组治疗前RMI 评分比较差异无统计学意义(P >0.05);治疗后两组RMI 评分较治疗前均明显上升,差异均有统计学意义(均P<0.05),实验组较对照组RMI 评分更高,差异有统计学意义(P<0.05),见表2。
2.2 两组患者治疗前后BBS 评分比较 两组治疗前BBS 评分比较差异无统计学意义(P >0.05);两组治疗后BBS 评分较治疗前均明显增高,差异均有统计学意义(均P<0.05),实验组较对照组BBS 评分更高,差异有统计学意义(P<0.05),见表3。

表2 两组患者治疗前后RMI 评分比较(分)

表3 两组患者治疗前后BBS 评分比较(分)
2.3 两组患者治疗前后独立步行百分比比较 两组患者治疗前独立步行百分比比较差异无统计学意义(P >0.05);两组治疗后独立步行百分比较治疗前均明显增高,差异均有统计学意义(均P<0.05),且实验组独立步行百分比较对照组更高,差异有统计学意义(P<0.05),见表4。
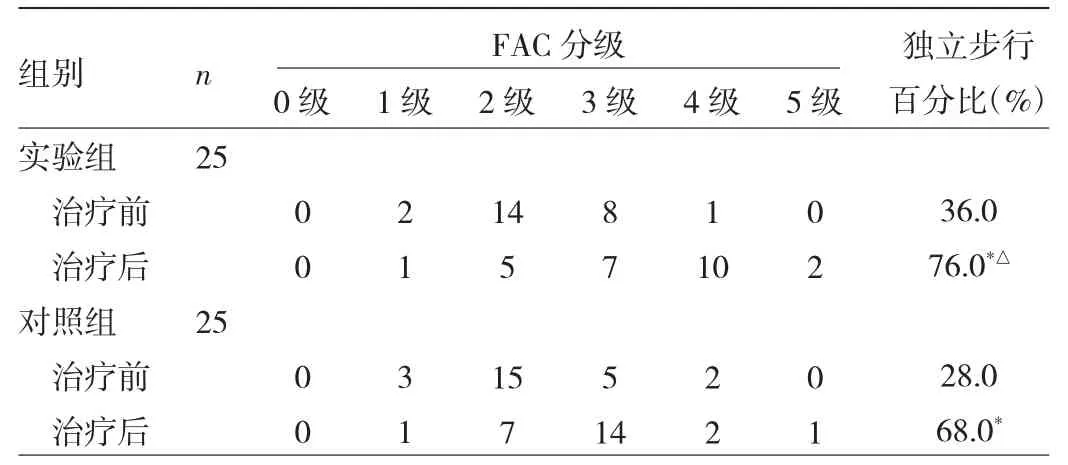
表4 两组患者治疗前后独立步行百分比比较(例)
2.4 两组患者治疗前后步长、步频、步速比较 两组患者治疗前步长、步频、步速比较差异均无统计学意义(均P >0.05);两组治疗后步长、步频、步速较治疗前均明显上升,差异均有统计学意义(均P<0.05),实验组较对照组步长、步频、步速均更优,差异均有统计学意义(均P<0.05),见表5。
3 讨论
随着人们生活水平提高,脑卒中患者回归社会、社区及家庭的自我期望也随之增强[8]。临床中发现,脑卒中患者下肢运动功能较上肢功能尤其是手的精细活动在恢复时间上具有优势,且难易程度较低,治疗效果较好[9-10]。目前临床上对于此类患者多采取传统康复方法,即通过指导患者进行平衡和步态训练,避免代偿姿势,为脑卒中患者提供正确的协调与平衡感觉输入,纠正下肢错误运动模式。但在徒手训练过程中,治疗师既要保证患者安全又要进行步态指导,存在安全隐患,且难以控制患者骨盆运动及步行周期中双侧下肢的支撑和摆动。临床训练中因注重下肢运动功能的训练而容易忽略骨盆训练[11],从而导致患者步态改善不明显。研究表明躯干与骨盆控制能力是机体平衡及步行运动能力的综合反映[12],骨盆带及周围肌群属于人体核心部位,为肢体功能动作提供支持,保证上下躯干传导动作的发挥。肢体的随意运动是以近端稳定性为基础的,运动发育遵循从上至下、由近及远的原则[13],因此躯干和骨盆的稳定决定了下肢协调运动和步行稳定[14-15]。脑卒中可导致中枢神经系统损伤,继而影响感觉整合与运动输出,降低骨盆及周围肌群的运动反馈,使得患者的平衡功能受到巨大影响,身体稳定性及协调能力丧失以至于无法维持步行过程中的正常姿势和身体重心,因此需要一个在保证训练安全的同时可以强化患者骨盆控制能力的平台进行步行训练,下肢骨盆控制康复机器人满足这一要求。
本研究采用上海电气集团股份有限公司研发的下肢骨盆控制康复机器人。该机器人骨盆控制装置根据人体骨盆运动生物力学设计,人体躯干在正常情况下行走时骨盆两侧旋前和旋后区域控制在-4°至+4°,盆骨前后、上下、左右3 个轴方向的运动呈正弦波形曲线运动[16]。该设计可使得患者在步行训练过程中重心可以在安全范围内进行移动和调节,减重腰带的控制装置不同于临床上常见的外骨骼固定式机器人,该装置具有减重支持、不限制患者骨盆正常运动等优点,从而有效降低躯干运动时的能量消耗,降低步行难度,增强患者信心。根据脑卒中典型的偏瘫步态特点,患者在行走时,两侧肢体呈非对称性摆动,有研究显示,这是因为偏瘫患者双足支撑相延长至60%~65%,摆动期均缩短至35%~40%,若要从根本上改善步行能力,则需要加强患侧下肢载重能力,延长患肢负重时间[17]。该机器人可替代治疗师以达到保护患者的目的,且治疗师可通过控制患者踝关节延长患足支撑地面的时间来增加该侧肢体的负荷,引导患者将步长、步频、步速等控制在正常范围[18]。同时在患者发病后,损伤的脑神经可以进行自我修复,一些胶质细胞被唤醒,神经生长因子不断增长,使得中枢神经系统逐渐发挥其功能价值。下肢骨盆控制康复机器人的介入可以不断地增加上述信息刺激的输入,有利于提高神经功能可塑性。

表5 两组患者治疗前后各步态数据比较
脑卒中最佳恢复黄金阶段为起病后3 个月内,此后肢体恢复将进入平台期,故本研究选取病程在3 个月内、具备一定步行能力且存在异常运动模式的患者作为研究对象来观察下肢骨盆控制康复机器人的步行训练的效果。本研究发现,经治疗8 周后,两组患者RMI、BBS 评分、独立步行百分比、步长、步频、步速较治疗前均显著改善,进一步组间比较发现,治疗8 周后实验组患者上述疗效指标均优于对照组,证明在常规干预基础上辅以下肢骨盆控制康复机器人训练能进一步提高偏瘫患者下肢运动能力,与国内相关报道一致[19-20]。康复是一个漫长的过程,传统的康复治疗方法千篇一律,治疗师与患者一对一的早期步行训练存在较大跌倒风险,针对脑卒中偏瘫步态的训练不管在内容还是时间上均难以满足患者及家属的治疗需求。该机器人步行训练系统可定时、量化训练,侧重骨盆控制下的步行协调性和安全性[21]。通过骨盆控制机制,可有效改善患者平衡能力,提供安全平台进行步态纠正,通过减重系统减少患侧支撑降低步行训练难度,从而提高步行功能。
综上所述,基于骨盆控制减重系统原理的下肢康复机器人训练可有效改善患者的平衡功能与步行能力,并且相比早期外骨骼式机器,下肢骨盆控制机器人为患者骨盆和下肢提供了更大活动自由度。但该机器人尚有不足之处,首先其对于软瘫期患者无法进行训练;其次,若能在治疗过程中结合心电反馈,第一时间了解患者身体运动情况,了解机器人训练对心肺功能的影响,将更加有助于卒中后患者的恢复。
猜你喜欢
上海护理(2022年2期)2022-11-28
数学大王·中高年级(2022年5期)2022-05-22
上海护理(2021年3期)2021-12-01
今日农业(2021年4期)2021-06-09
幸福·健康版(2018年4期)2018-04-20
汽车工程学报(2017年2期)2017-07-05
家庭百事通·健康一点通(2017年5期)2017-05-19
电影故事(2016年6期)2016-08-20
电影故事(2016年4期)2016-06-02