平底型高速交通运输艇加装尾插板减阻技术研究
2021-03-29 10:06欧勇鹏
船舶力学 2021年3期
王 陆,欧勇鹏,叶 青
(1.91404部队91分队,河北秦皇岛066000;2.海军工程大学舰船与海洋学院,武汉430033)
0 引 言
平底型高速交通运输艇由于具有吃水浅、机动灵活和装载性能好等特点,被越来越多的船舶使用者所青睐[1]。不过在阻力方面,平底船型尾部构型较宽,不但增加了船型阻力,还使得船体的重心后移,增大了纵倾角度,使阻力进一步增大。而对于交通运输艇来说,良好的快速性意味着更高的工作效率以及经济效益。因此,找到一种能够在保留该艇型原有优势的基础上达到减阻提速效果的策略十分重要。
船体尾插板是一种结构简单,可以在尽可能保留原有船型特点的基础上,使船体达到减阻增速的方法。目前,国内外部分学者对船体加装尾插板后的阻力特性及减阻机理进行了研究,潘柏衡等[2]对安装尾插板的滑行艇进行了研究,取得了10%的减阻效果;周广礼等[3]为排水型船设计了可动尾插板,研究了不同航速下通过调整尾插板下反角来达到较好的减阻减摇效果;Day[4]等通过分析尾插板流场变化、升沉和纵摇,研究了游艇加装尾插板的减阻机理。
针对平底型高速交通运输艇加装不同尺寸的尾插板,本文采用CFD与模型试验相结合的方法,得到加装尾插板后运输艇的阻力、姿态等各项参数。通过对阻力构成、姿态变化、流场变化等现象的分析,评估艇体加装尾插板的减阻效果,并探究尾插板的减阻机理。
1 数值计算方法与结果
1.1 研究对象
本文以一条平底型高速交通艇模型为研究对象,模型的主尺度参数见表1,三维视图见图1。表1 中,Δ 为排水量,L 为艇体总长,LP为折角线长,BPX为折角线最大宽度,βM为中部艇底斜升角,βT为尾部艇底斜升角。静止正浮状态下,船模的初始纵倾角为0°,重心距离船中为-11.05%L(舯后),船舯距离尾封板尾1.282 m。

表1 模型的主尺度参数Tab.1 Main particulars of hull model

图1 计算船模的三维图Fig.1 3-D hull model for calculation
1.2 数值计算方法
本文自由液面的计算采用HRIC-VOF 模型[5-7],湍流模型则采用Realizable k - ε 模型[8-9]。图2 给出了数值模拟的计算域、网格分布和划分及边界条件设置。数值水池为长方体,长8.0L、宽2.5L、高5.0L,上表面距离艇体上甲板为2.0L,设置为速度入口;下表面距离艇底部为2.8L,设置为速度入口;侧面距离中纵剖面为2.5L,设置为速度入口;中纵剖面均设置为对称面;入口距离艇体首部向前2.0L,设置为速度入口;出口距离艇尾向后5.0L,设置为压力出口,压力沿深度方向按静水压力线性变化;数值水池沿水线面将分为上下两部分,上部分为空气,下部分为水。水的密度取997.56 kg/m3,动力粘性系数为8.887 1×10-4Pa·s;空气密度为1.184 15 kg/m3,动力粘性系数为1.855 08×10-5Pa·s。

图2 流域网格及边界条件Fig.2 Calculation region and boundary condition
网格划分采用切割型网格,在艇体、自由面、尾插板附近均进行了网格加密,如图3所示。

图3 艇体表面及附近的网格划分Fig.3 Meshes of calculation region
图3(a)显示了艇体表面及自由液面的网格布局情况,图3(b)显示了艇体加装尾插板后的尾插板加密区。光体计算网格总数为290 万,加装尾插板模型计算网格总数为300 万。采用二阶迎风格式,时间为一阶格式,步长取为0.002 s。
1.3 数值计算结果验证
为验证数值计算结果的准确性,对模型艇数值计算结果与试验结果进行对比。模型艇光体状态下阻力、纵倾角、重心升沉的试验结果与数值计算结果对比见表2。其中Rt表示总阻力,单位N;FV表示容积傅汝德数。

表2 数值计算与模型试验值的偏差分析Tab.2 Difference between numerical values and experimental values
通过表2可以知道,总阻力计算结果与试验值偏差最大为5.6%,大部分偏差小于3%;纵倾角偏差小于0.38°,大部分偏差小于0.2°;重心升沉偏差最大为4.25 mm,大部分航速下偏差小于1 mm。可见,在航速FV=0.74~2.78内,本文采用的数值计算方法能够得到模型艇精度较高的总阻力、纵倾角和重心升沉,可用于该模型艇后续开展的各项数值计算。
2 平底型高速交通运输艇加装尾插板阻力特性分析
2.1 尾插板对阻力的影响
图4为加装尾插板后艇体模型示意图。尾插板沿着尾部封板向下延伸,在数值计算阶段,本文选取了延伸长度距离船底5 mm的尺寸。
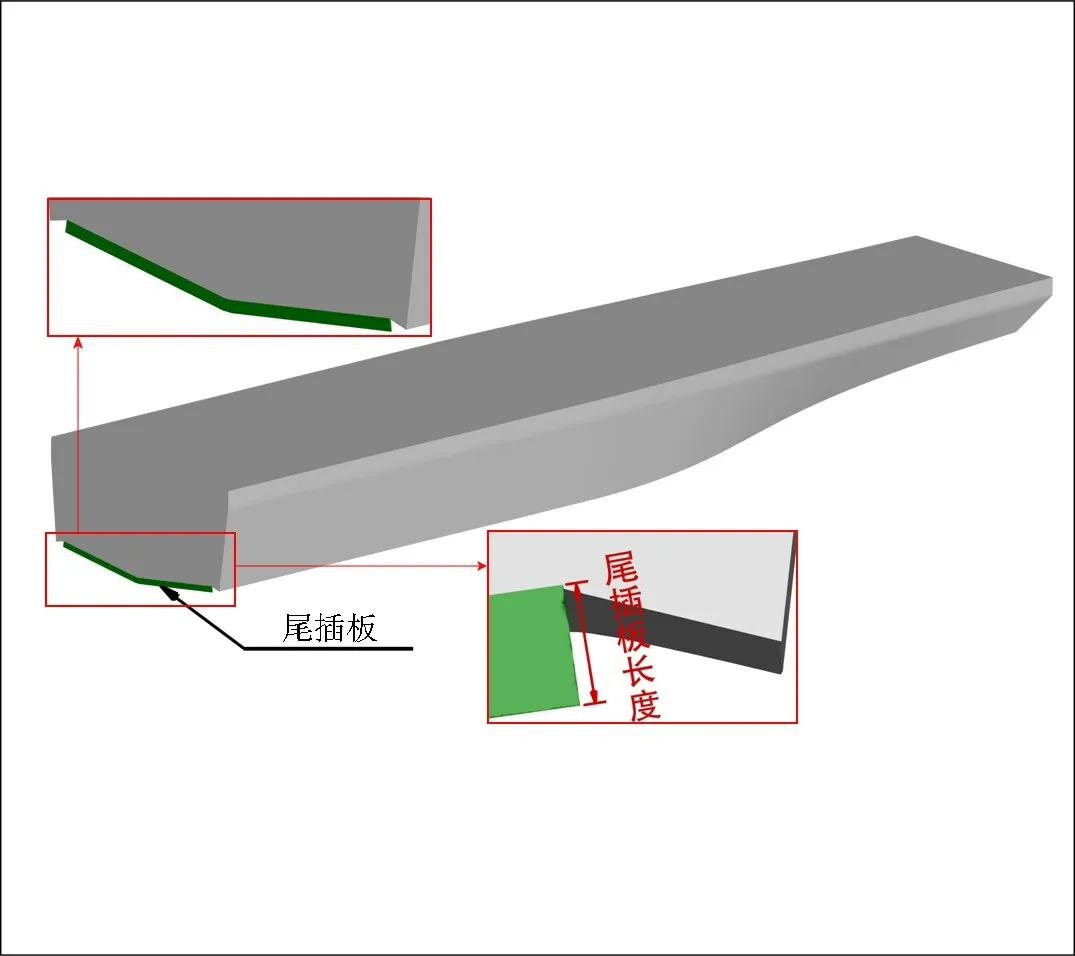
图4 艇体加装尾插板示意图Fig.4 Installation sketch map of stern insert plate
图5 给出了通过数值计算得到的光体与安装尾插板状态下总阻力的对比,其中w 为排水量,单位N;Rt/w表示模型艇总阻力的单位排水量力。表3为部分航速下总阻力计算结果的具体对比。
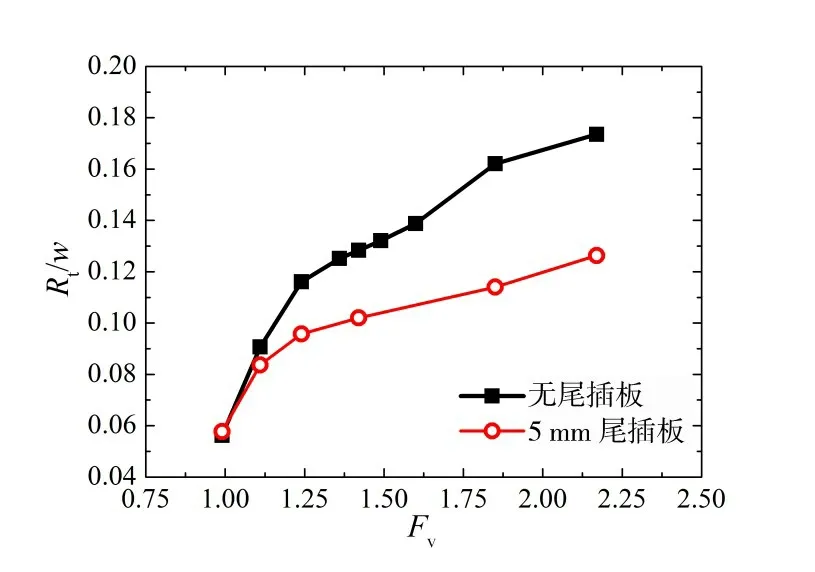
图5 光体与加装尾插板总阻力数值计算结果对比Fig.5 Comparison of numerical results of Rt between bare hull and model with stern insert plate
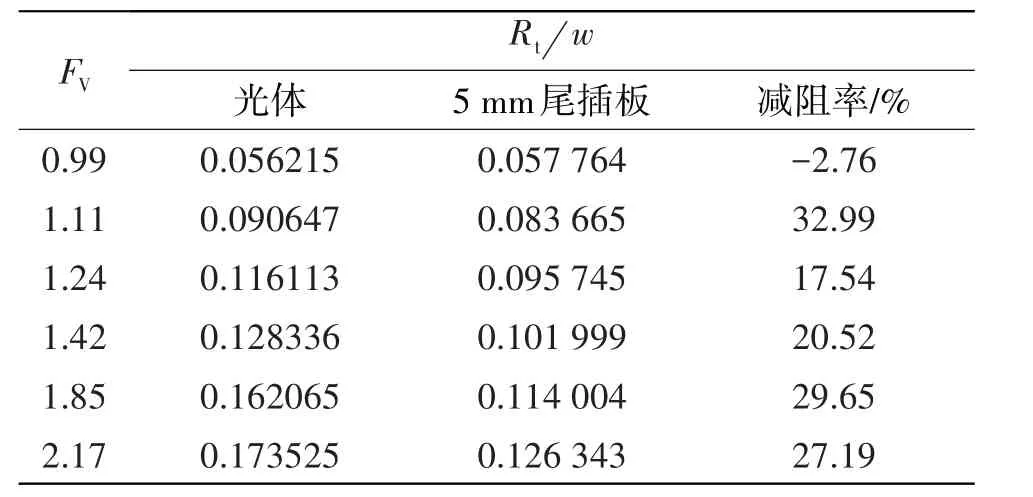
表3 光体与加装尾插板数值计算结果对比Tab.3 Comparison of numerical results of Rt between bare hull and model with stern insert plate
从图5 与表3 可以看出,艇体加装5 mm 尾插板后在航速Fv=1.11~2.17 的范围内都产生了比较明显的减阻效果,减阻率大部分大于20%,最大可达到32.99%。但是在低速时,加装尾插板出现了小量的增阻情况。
2.2 阻力特性分析
为进一步了解不同状态下艇体的阻力构成,图6和图7分别给出了不同状态下艇体摩擦阻力Rf与压阻力Rp的对比。从图6 可以看出,在航速Fv=0.99~2.17 的范围内,艇体加装尾插板后对摩擦阻力的影响并不大,总阻力的变化受摩擦阻力的影响不大。从图7 可以看出,在相同速度范围内,加装尾插板后运输艇的压阻力呈明显的下降趋势,且压阻力变化趋势与图5中总阻力变化趋势大致相同。
图6 光体与加装尾插板艇体摩擦阻力对比Fig.6 Comparison of numerical results of Rf between bare hull and model with stern insert plate
图7 光体与加装尾插板艇体压阻力对比Fig.7 Comparison of numerical results of Rp between bare hull and model with stern insert plate
由此可知,加装尾插板后艇体总阻力的变化主要受到压阻力变化的影响,而压阻力主要是由兴波阻力Rw与粘压阻力Rpv构成。因此,在进行减阻机理分析时,应着重分析造成运输艇兴波阻力与粘压阻力产生变化的原因。
3 平底型高速交通运输艇加装尾插板减阻机理分析
3.1 艇体兴波分析
兴波阻力产生的原因是艇体在航行时兴起了重力波,降低波幅可以有效减少兴波阻力。图8 为航速Fv=2.17时艇体舷侧兴波波形波高h的对比,Xh为所测波形点与艇首部的纵向距离,单位为m。在进行对比时,选取与船舯距离Yz/Bpx为0.87和1.74处的波形,具体位置如图9所示。

图8 Fv=2.17 时艇体舷侧兴波波形对比Fig.8 Comparison of hull side waveforms(Fv=2.17)

图9 艇体舷侧兴波波形对比位置示意图Fig.9 Diagram of contrastive position of hull side waveform
从图9可以看到,艇体加装尾插板后,舷侧兴波波幅有明显下降,从而减小了艇体的兴波阻力。
图10为部分航速下两种状态艇体尾部兴波高度随船长方向的对比,其中haft-w表示尾部兴波高度,单位为m;X表示到船尾的纵向距离,单位为m。

图10 部分航速下光体与加装尾插板艇体尾部兴波高度对比Fig.10 Comparison of aft wave-making heights between bare hull and model with stern insert plate
从图10可以看出,加装尾插板后艇体尾部兴波的波幅有明显下降,特别在X/L>1.0的范围内几乎没有兴波,这进一步减小了艇体的兴波阻力。
3.2 艇底压力分析
粘压阻力产生的原因是船首部与尾部之间存在压力差,因此可以通过减小压力差来减小粘压阻力。图11为Fv=2.17时两种状态下艇体底部压力分布图,单位为Pa。

图11 Fv=2.17时光体与加装尾插板艇底压力分布Fig.11 Bottom pressure distribution of bare hull and model with stern insert plate(Fv=2.17)
从图11可以看出,加装尾插板后,艇体尾部的压力由166 Pa上升至3 000~4 000 Pa,而首部压力由7 000~8 000 Pa下降至1 000~3 000 Pa,这一方面使得艇体首尾压差有所降低,另一方面使得相对于船舯的抬首力矩减小。
3.3 艇体姿态分析
平底型高速交通运输艇由于平底船型在高速航行时容易产生较大的纵倾角度,导致阻力进一步增大。图12为两种状态下艇体纵倾角度对比。
从图12可以看出,在Fv=0.99~2.17的范围内,当艇体为光体状态时,抬首现象严重,纵倾角较大;在加装尾插板后,抬首现象得到明显改善。因此,尾插板也可以通过调整模型艇的航行姿态来达到减阻的效果。
图12 光体与加装尾插板艇体纵倾对比Fig.12 Comparison of trims between bare hull and model with stern insert plate
4 模型试验
为进一步探究不同尾插板长度对减阻效果的影响,在中国特种飞行器研究所高速拖曳水池中进行了模型试验,该水池长510 m,宽6.5 m,水深5 m。拖车最高速度为22 m/s。在本实验中,阻力的测量采用BLR-1 型拉力传感器,量程为0~40 kg,精度为0.2%。纵倾角的测量采用倾角仪,精度为0.1°。升沉采用拉线式方法测量,误差小于1%。在进行尾插板阻力试验时,尾插板伸出长度为5 mm、10 mm和15 mm,厚度为3 mm。
4.1 数值计算方法的进一步验证
通过模型试验,得到了模型艇光体状态与加装尾插板状态下的各项数据。图13为艇体加装5 mm尾插板总阻力和纵倾角数值计算结果与试验结果对比。

图13 加装5 mm尾插板数值计算结果与试验结果对比Fig.13 Comparison between numerical results and experimental results of model with 5 mm stern insert plate
从图中可以看出,加装5 mm 尾插板后艇体的总阻力和纵倾角数值计算结果与试验结果吻合较好,从而进一步说明了本文的数值计算与网格划分方法能够较准确地计算平底型高速交通运输艇加装尾插板后的阻力与姿态。
4.2 试验结果分析
图14 为不同状态下艇体总阻力与纵倾角试验结果的对比,图15 为不同状态下艇体姿态的对比,表4为部分航速下总阻力试验结果的具体对比。
图14 光体与加装尾插板试验结果对比Fig.14 Comparison of experimental results between bare hull and model with stern insert plate

图15 Fv=2.17时光体与加装尾插板艇体姿态对比Fig.15 Comparison of attitudes between bare hull and model with stern insert plate(Fv=2.17)
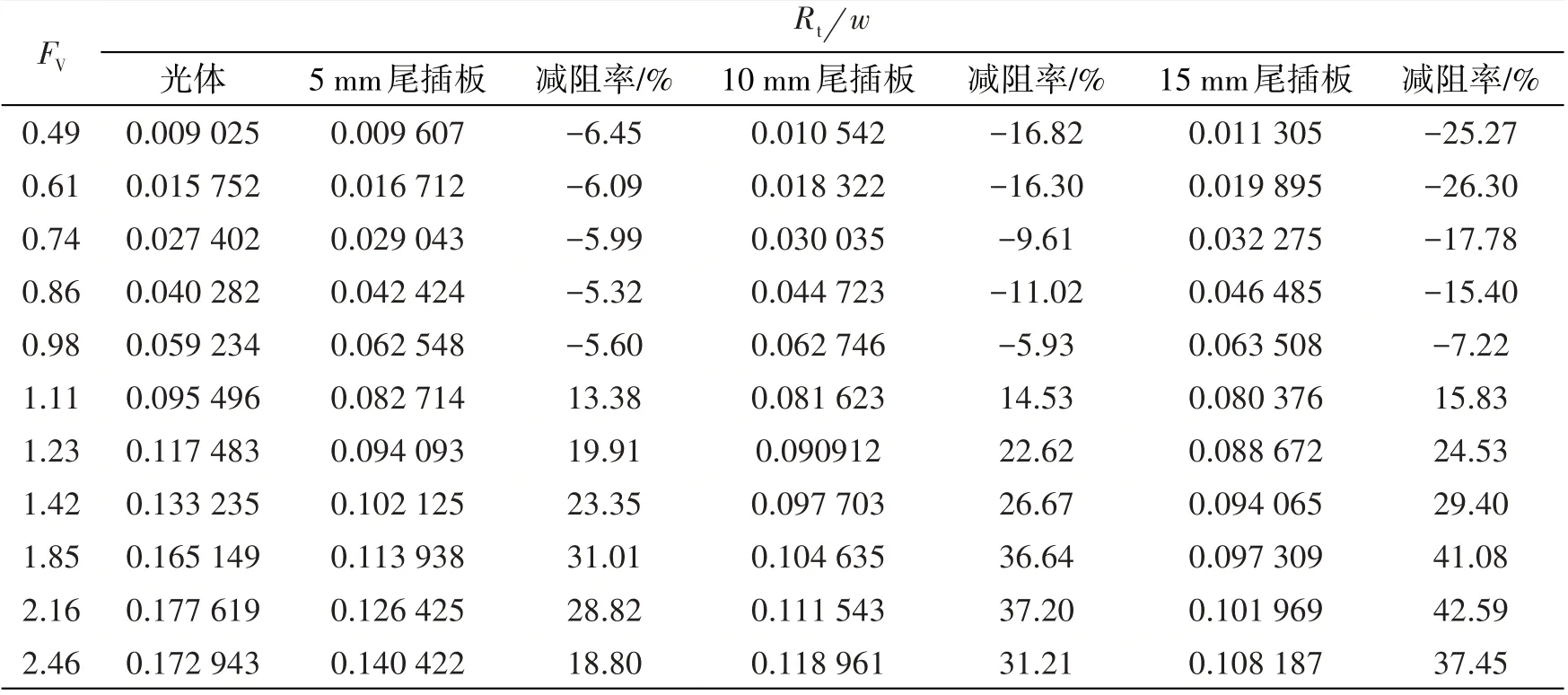
表4 光体与加装尾插板试验结果对比Tab.4 Comparison of experimental results between bare hull and model with stern insert plate
从图14(a)与表4可以看出,三种长度的尾插板在航速Fv=1.11~2.46的范围内均保持减阻效果,最高可达42.59%,同时三种尾插板均出现了在某个速度下能达到最大减阻效果的情况,这个最佳减阻速度可能与船型、尾插板构型等有关,可做进一步研究分析。在航速Fv=0.49~0.98的范围内,由于模型艇速度较低,安装尾插板后带来的阻力增值无法被减小的压阻力抵消,出现了增阻情况。从图14(b)和图15 可以看出,艇体加装尾插板后,抬首现象得到明显改善,且尾插板的伸出长度越长,改善效果越好。但是从图14(b)还可以看出加装15 mm 尾插板的艇体在速度Fv>2.16 时出现了埋首现象,这不利于运输艇的实际应用。
图16 为模型艇航速Fv=2.17 时,艇体不同状态下的尾部兴波。从图16 可以看出艇体加装尾插板后,尾部兴波波幅明显降低,且喷溅现象大大改善。通过对比还可以看出,该艇型加装尾插板的伸出长度越长,降低尾部兴波波幅的效果越好。
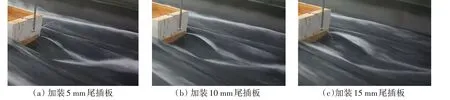
图16 Fv=2.17时不同状态下艇体尾部兴波对比Fig.16 Comparison of hull aft waveforms under different conditions(Fv=2.17)
5 结 论
根据本文研究内容与结果,得到如下主要结论:
(1)平底型高速交通运输艇加装尾插板后在航速较高时能够产生较好的减阻效果,而当航速过低时则会产生一定的增阻效果。
(2)该类艇加装尾插板后能够有效降低艇体的兴波阻力和粘压阻力,但是对摩擦阻力的影响不大。
(3)该类艇加装尾插板后能够有效地改善艇体抬首现象,但是当航速较高时会出现埋首现象,使减阻效果降低,不利于运输艇的实际使用。
由于该类艇航行时涉及的速度范围较大,建议针对该艇型应设计尺寸可调节的尾插板;在针对平底型交通运输艇进行尾插板设计时,应充分考虑减阻效果、姿态影响等因素,选用尺寸适中的尾插板;建议应针对该类艇加装尾插板后在高航速下如何改善埋首的问题展开研究。
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12
航空发动机(2022年3期)2022-10-13
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
中国舰船研究(2022年2期)2022-04-26
造船技术(2022年1期)2022-03-08
现代矿业(2021年3期)2021-06-02
山西焦煤科技(2018年2期)2018-05-31
中国舰船研究(2016年6期)2016-12-12
真空与低温(2015年4期)2015-06-18