
基于MATLAB 平台的双绞式液压升降机优化分析
2021-03-16 04:01王军
装备制造技术 2021年11期
王 军
(枣庄科技职业学院,山东 枣庄 277500)
0 引言
双绞式液压升降机在工程建设中应用十分广泛,但是对于其结构的优化分析比较缺乏,设计人员往往为省时省力,仅对现成的尺寸加宽、加粗等类比处理,并没有通过优化系统进行细致的计算和分析。由于传统方式所制造的升降机,在应用的过程中显得尤为笨重,己经不能满足当今快速发展社会的需求,很多方面都需要进行改进;同时,制造厂商不按规范制造升降机,不尊重我国实际情况,照抄国外产品,造成升降机事故频发。国外研究者C.GANTES 对剪叉式空间结构的非线性特征提出了新的设计理论,并对空间剪叉式机构进行分析验证。A.S.K.KWAN 基于动力学对剪叉机构的位移运动变化关系进行了探索。在国内武汉理工大学的胥军对剪叉式升降机的剪叉杆强度进行了校核优化后,提高了举升机构的稳定性并对升降平台和油缸的运动过程进行了分析[1];燕山大学王晓楠用剪叉式液压升降机设计了一种甘蔗收集车,对液压缸位置进行了参数优化,并运用AMESim 软件得到升降平台动力特性曲线[2];大连理工大学的付昱对双液压缸剪叉式升降操作平台进行研究,使用ANSYS 对剪叉式平台优化分析,运用ADAM 软件分析了液压缸动力学特性[3]。但现有研究主要基于静态力学分析给出的计算方法导入MATLAB 对剪叉液压升降机进行优化。通过动态力学分析,运用虚功和虚位移方程推导出液压缸活塞杆的最大推力,对剪叉机构与液压缸接触点和上下端点的铰孔进行力学分析,并基于MATLAB 软件进行优化,使得在相同推力作用下减少设备的自重和自升高度,减轻了重量节省材料,提升了工作效率。
1 实验设备
自行走双铰接式液压升降机如图1 所示。液压升降机的主要部分包括承重上升平台、8 个剪叉杆、2 对液压缸、机架、电机等部分组成。

图1 自行走双铰接式液压升降机
液压升降机的参数见表1。
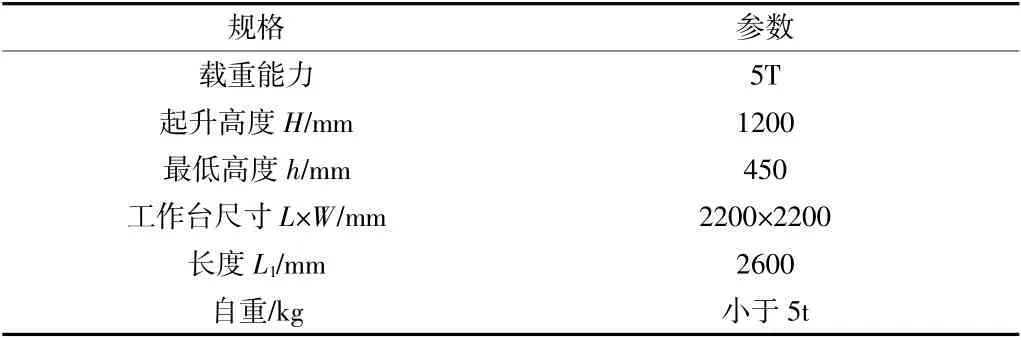
表1 单侧车下设备拆装升降工装参数
首先对双铰接式升降机构进行的参数设定,建立几何模型。剪叉式升降机的基本构架如图2 所示,升降机是由两组液压缸进行并列链接两组剪叉臂。两组剪叉臂并列连接在底座上,只需要分析一组剪叉机构的升降运动。
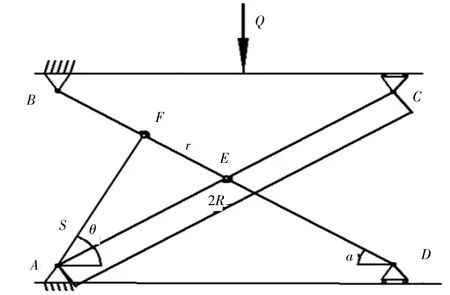
图2 剪叉机构简图
2 升降机构的力学分析
剪叉式液压升降机的举升运动主要是依靠驱动装置液压缸的推举实现的。液压缸活塞杆的最大推力完全影响着剪叉机构的各种性能,在满足举升机构举升条件的基础上对活塞杆的最大推力进行科学有效的分析能够改善优化构件[3]。
2.1 静力学方法分析
静力学方法就是指通过对物体的受力分析,建立平面汇交力系的平衡方程和平面力偶系方程,对各杆铰点未知量进行求解。根据双铰式剪叉升降机构计一般简图几何关系,液压缸的轴线S长度为:
两个双铰点剪叉臂AC、BD的受力分析如3 所示。

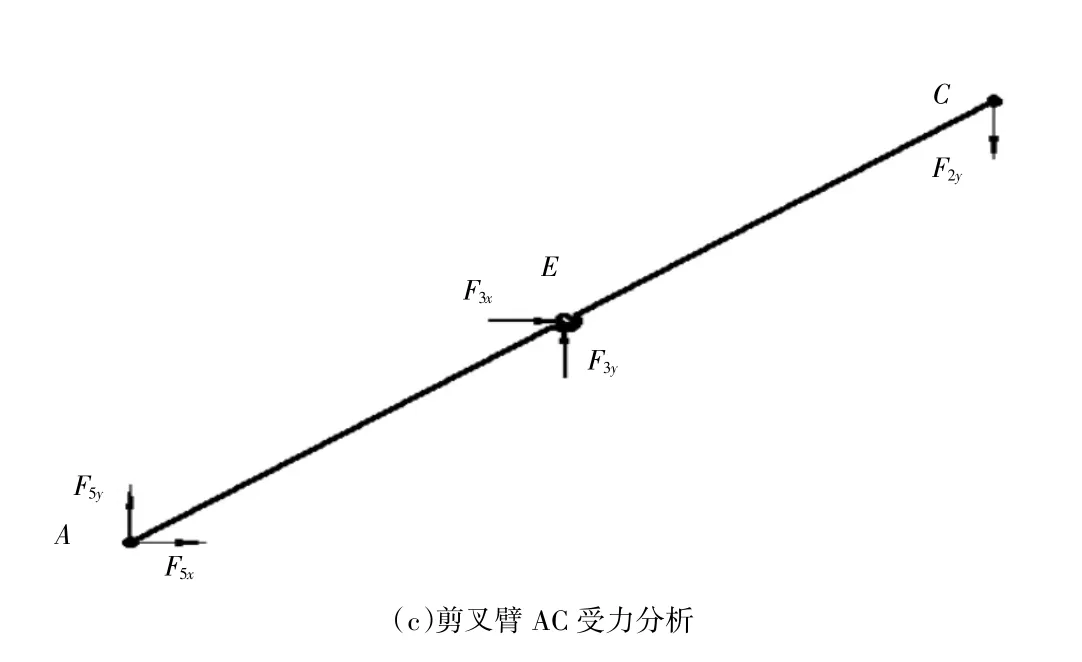
图3 剪叉臂受力分析
剪叉臂都是对称布置,因此受力也是对称的,载荷作用在支点上是受力均分即为G/4。对AC和BD杆进行受力分析,建立平衡系方程:
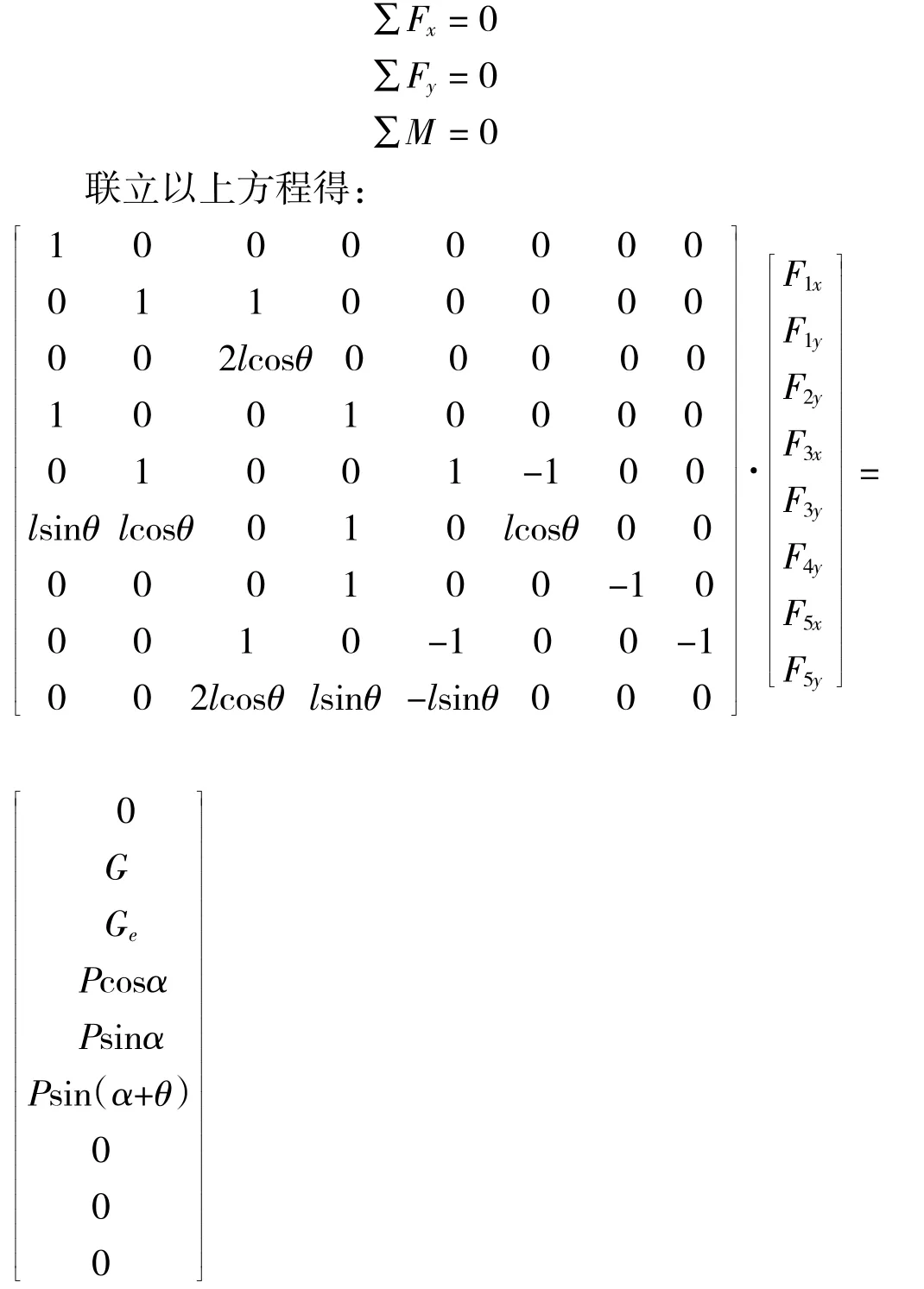
通过上式推导出液压缸推力与两个夹角之间的关系得到液压缸推力,通过液压缸推力可以求得各铰点的受力值:

2.2 虚位移方法分析
通过虚位移和虚功方程对活塞杆的最大推力进行计算求解[4]。
在该数学模型中,双铰式剪叉液压升降机液压缸的上端与剪叉臂有相对位置关系,而液压缸下端铰点与底架连接。图中剪叉臂长为2R,液压缸铰链点尺寸为已知数a、b、u、g,液压缸轴线与水平线的夹角为θ,X为液压缸活塞杆推出的距离,Y为剪叉式升降机构升降的距离,Q为起升重量,P 液压缸活塞杆推力,dx为P在x向的虚位移。dy为Q在y向的虚位移。当升降平台的载重为Q时,液压缸活塞杆推力P用虚位移原理进行求解
通过图中几何关系可以算的:

其中:Q1载重载荷,5 000 kg。Q2升降机自重,3 500 kg。剪叉臂降到最底层与水平面夹角12°。单侧剪叉杆的液压缸最大推力Pmax=5356.5 N。
3 举升机构优化
液压缸的伸出末端的铰接点距离到两个剪叉臂中间铰点的距离r参数多少,不仅决定液压缸安装距离,也影响到液压缸最大推力[5]。由于r的取值不同,中间铰点F的运动轨迹也不同。液压升降机工作过程中铰点A固定,铰点D向右水平滑动,铰点B、C两点垂直向上运动。以A为坐标系的原点O建立直角坐标系,其中垂直向上的运动为坐标系的y轴方向,铰点D运动方向为坐标系的x轴,设中间铰点F的坐标点为(Fx,Fy):

当参数r分别取100、200、300、400、500 时,运用MATLAB 进行编程分析,绘制出中间铰点F的轨迹图如图4 所示,从而为后续约束条件初步确定取值范围。

图4 中间铰点F 轨迹图
由图4 可知当参数r=100 mm 时,液压缸的安装位置距离最大,液压缸起升角θ最小,液压缸伸出轴线最长;当r= 500 mm 时液压缸的安装距离最小,液压缸起升角θ最大,液压缸伸出轴线最短。由文献可知,液压缸起升角θ越大液压缸所需推力则越小,单一角度看r 越大越好,但是实际中没有合适的液压缸。
已知液压升降机的举升高度为1.2 m,对模型测量得到有关常量。取值如下:Q=49 000 N;R=1 910 mm;m=2 600 mm;n=720 mm。
运用MATLAB 编程,得到剪叉臂与水平角度θ,液压缸推力P关于伸出末端的铰接点距离到两个剪叉臂中间铰点的距离r参数三维曲线,如图5、6 所示。
图5 θ 关于参数a 与h 的变化曲线
由图5 可知:在活塞杆铰接位置r一定时,举升油缸与水平方向的夹角θ随举升高度的增加非线性变大;在举升高度h一定时,θ随参数r的增加非线性变大,与实际情况相吻合。由图6 可知:当活塞杆铰接位置确定时,随着举升高度h的增加,举升油缸推力逐渐减小,并逐渐趋于平缓;当举升高度h一定时,随着活塞杆铰接位置远离剪叉臂铰点中(心即参数r增大),举升油缸的推力随之非线性减小,并逐渐趋于平稳[6-7]。在保证举升油缸最大推力尽可能小的前提下,综合考虑整体布置,做到各部件之间不产生干涉,最终确定a=240 mm。
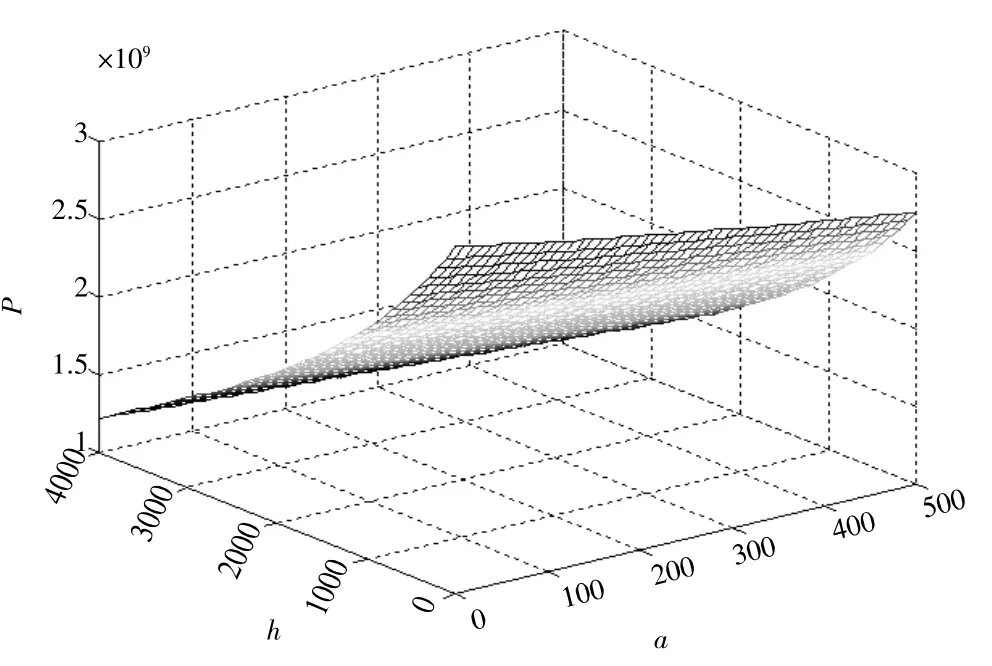
图6 P 关于参数r 与h 的变化曲线
通过Matlab 的数值分析得到最大推力的最优解,液压缸的最小推力值Pmin= 44 635 N。在未经过软件优化时液压缸在最低位置时,液压缸最大推力P计算结果为P=53 565 N。通过对比2 种结果可知,经过优化后的液压缸最大推力减少了16.7%。
4 总结
本文以企业现有的特定型号剪叉式液压升降机为研究对象,在研究中运用虚位移原理和虚功方程法对液压剪叉式升降机构的结构分析和承载能力进行计算。通过建立数学模型,使用MATLAB 软件对剪叉式液压升降机的油缸进行了受力解析分析,在满足空间要求的基础上确定了最小推力时铰点的位置。通过静态分析和动态分析结合,使计算更加准确。
猜你喜欢
起重运输机械(2022年19期)2022-11-05
沈阳理工大学学报(2022年3期)2022-08-11
机械管理开发(2022年7期)2022-08-08
探索科学(学术版)(2020年9期)2021-01-20
装备维修技术(2020年3期)2020-11-20
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
流体机械(2017年9期)2017-02-06
凿岩机械气动工具(2016年3期)2016-03-01
