复合电源型电动汽车的自适应能量管理策略
2021-03-07 02:29曾云龙
电源技术 2021年2期
唐 强,汤 赐,曾云龙,王 勇,冷 婷
(长沙理工大学电气与信息工程学院,湖南长沙410114)
随着技术的进步,电动汽车愈发能满足出行需求,且具有节能环保的优势,这使得电动汽车发展成为一种必然趋势。由于复合电源的使用,为提高系统的效率,合理的能量管理策略是核心。
目前,电动汽车复合储能系统能量管理策略可大致分为基于规则类和基于优化类。基于优化类的控制策略模型可获得全局最优解,但需要行驶工况的先验知识,且计算量大,难以在车载中实现[1-2]。基于规则的能量管理策略执行效率高、简单直观、易于车载实现[3]。
基于规则类的控制策略常见的有:逻辑门限控制策略、模糊控制策略和滤波器控制策略。模糊控制策略是应用最广泛的。该策略是一种模仿人的思维方式和推理方法的控制方法,具有无需对象的数学模型、鲁棒性较强的特点[4]。本文采用了多模糊控制器识别出驾驶意图,其识别结果用于自适应修正能量分配系数,从而不仅考虑车的因素还考虑驾驶员因素,实现了识别结果能量自适应分配。并利用了advisor仿真[5],分析了该策略的有效性。
1 复合电源系统
1.1 系统拓扑图
复合电源系统拓扑包含全主动式、半主动式、被动式3 种构型。综合考虑成本和使用效果,采用半主动式复合电源构型进行研究,如图1 所示。超级电容通过双向DC/DC 变换器与母线相连,电池直接与母线相连。这种结构一方面可以使超级电容能够在宽电压范围内工作;另一方面,电池直接连接到直流总线能够保证直流总线的电压相对稳定[6]。
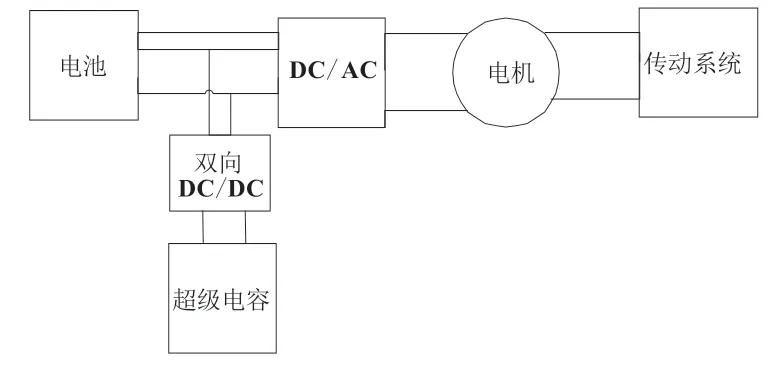
图1 半主动式复合电源构型
1.2 电池模型
电池选用Rint 模型,如图2(a)所示。图中U_bat为开路电压,R_bat为欧姆内阻,I_bat为电流,U_load为负载电压。
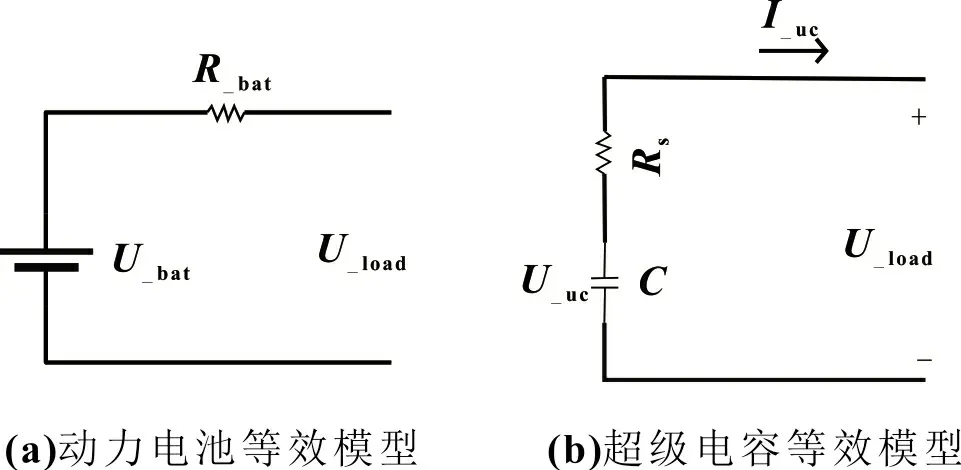
图2 部件模型
电池的负载功率P_bat为:

根据式(1)可得动力电池的电流:

SOC 用于表征剩余放电能力,计算公式为[7]:

1.3 超级电容模型
由于超级电容一阶RC 模型具有较小的RMSE(标准误差),且提高阶数对模型精度提高的并不明显,所以超级电容选用一阶RC 模型,如图2(b)所示。图中,电容的容量以C 表示,开路电压以U_uc表示,电流以I_uc表示,负载电压以U_load表示。
负载电压和开路电压关系为:

其中,开路电压的计算公式为:

式中:Q_uc为超级电容存储的能量。
忽略C 的变化,可得超级电容存储电量的SOC_uc等于电压差之比,见式(6):

式中:U_min、U_max分别为超级电容允许的最小电压、最大电压。
1.4 双向DC/DC 变换器
基于半主动式拓扑,更快响应速度和较大工作功率的双向DC/DC 变换器可减小直流母线承受的电压波动,有利于蓄电池的寿命[8]。而双向DC/DC 变换器存在参数多且未知及不易准确求解的问题,考虑到该问题,本文通过测试在不同输入电压下,效率随功率变化情况,结合查表法[9]建立双向DC/DC 变换器模型,如图3 所示。
2 驾驶意图-模糊自适应控制策略分析
驾驶意图-模糊自适应控制策略是结合模糊控制策略和驾驶意图识别提出的自适应能量管理策略。模糊控制策略只考虑了车的因素,即满足整车功率需求,未考虑加速意图、驾驶风格,即驾驶员因素。同时考虑车的因素和人的因素,更加符合实际情况,且根据驾驶意图自适应调整能量分配系数,可优化能量分配。本部分详细地介绍模糊控制策略、驾驶意图识别和驾驶意图-模糊自适应控制策略实现。
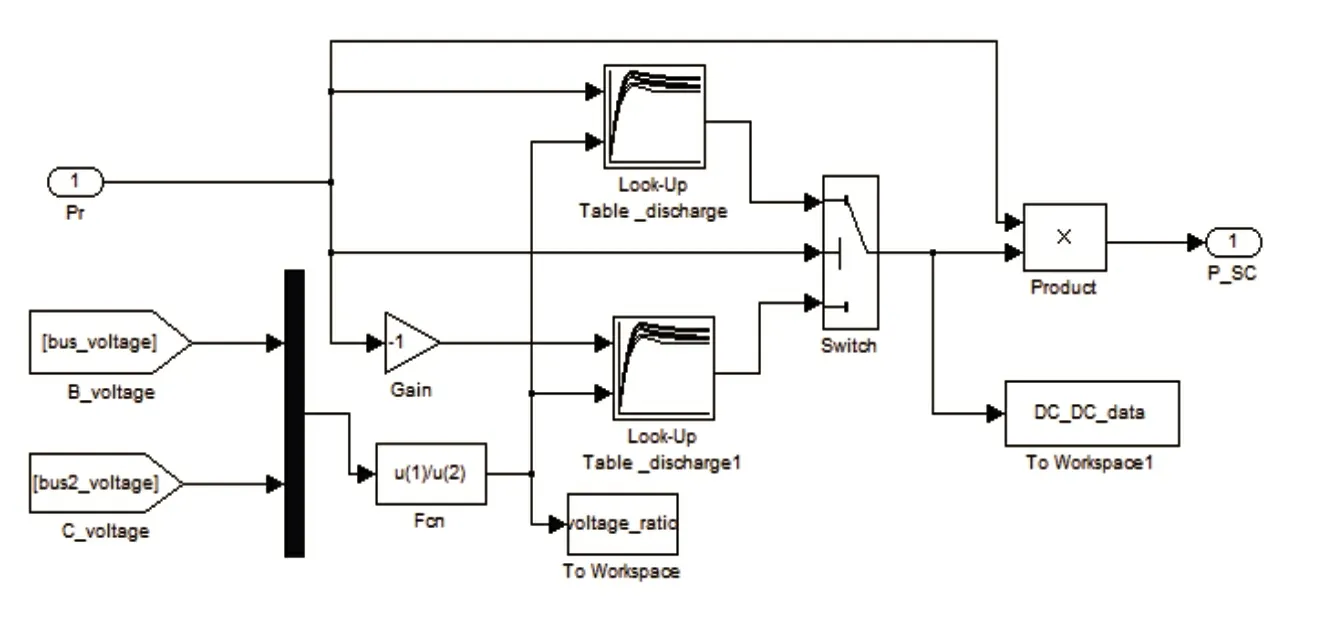
图3 DC/DC变换器模型
2.1 模糊逻辑控制
采用最经典的Mamdani 结构,其输入分别为Pr=[-0.2,1]、SOCb=[0.2,1]和SOCc=[0.2,1]。输出变量为Kb=[0,1]。对于Pr,由于实际域与论域不对应,所以实际域要转换为论域,通过实际域绝对值的最大值除以论域绝对值的最大值求得转换系数,Pr乘以该系数,即可完成转换。SOCb、SOCc、Kb论域与实际域一致,不用转换。模糊逻辑功率分配策略的输入、输出隶属度函数如图4。
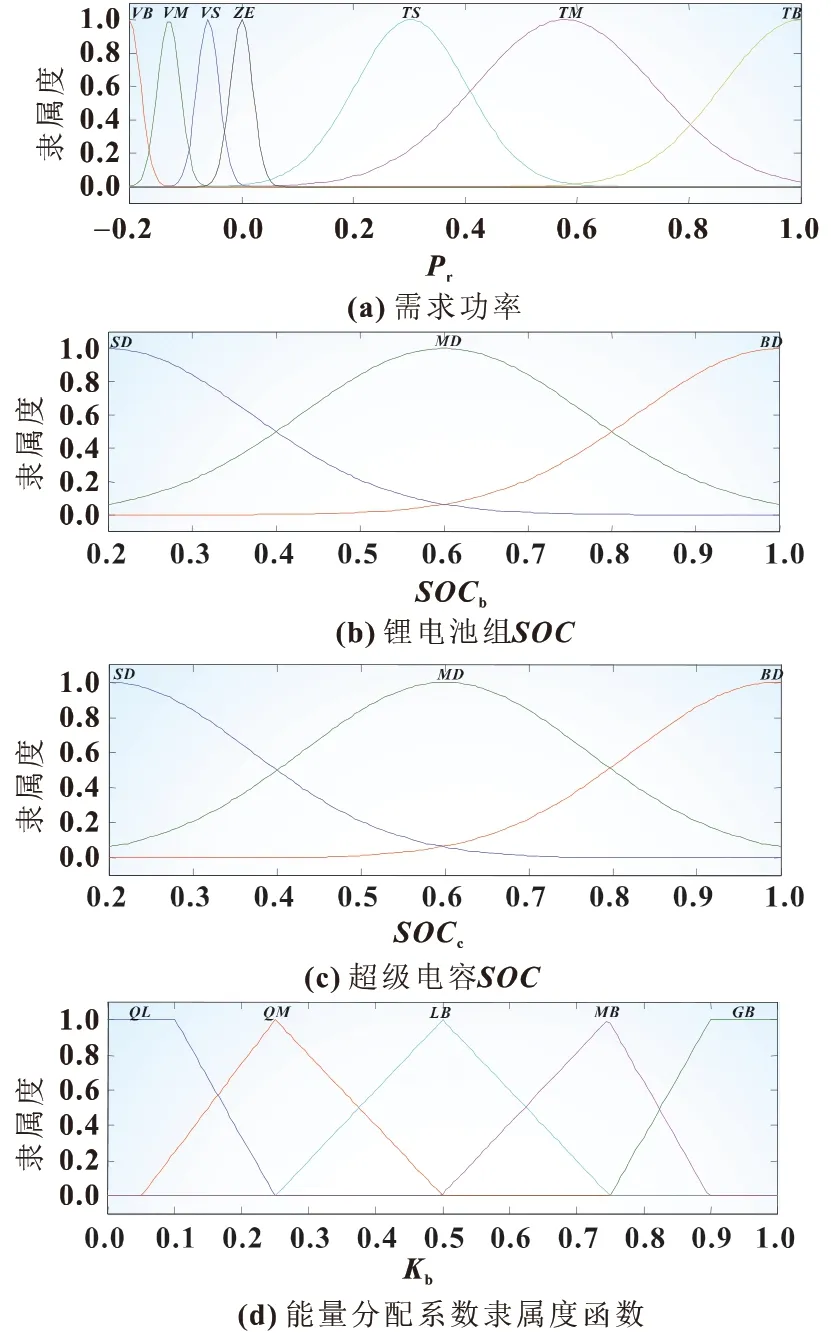
图4 输入与输出隶属度函数
综合制动过程和驱动过程设计了模糊控制器,模糊控制规则见表1。
确定了输入输出隶属度函数和模糊规则后,进行模糊推导,设计模糊控制策略结构图,如图5 所示。
2.2 驾驶意图识别
目前,识别驾驶意图的方法主要有模糊逻辑控制、人工神经网络和隐马尔科夫模型。应用模糊控制对驾驶意图识别是通过提取相关表征参数,经模糊推理识别驾驶意图。模糊控制对解决无法用数学描述的模型特别适用,控制结果符合人的思维以及经验,而且具有鲁棒性高的特点。本文中考虑到驾驶意图无法用精确模型描述,采用模糊控制识别驾驶风格和加速意图进而识别出驾驶员驾驶意图。
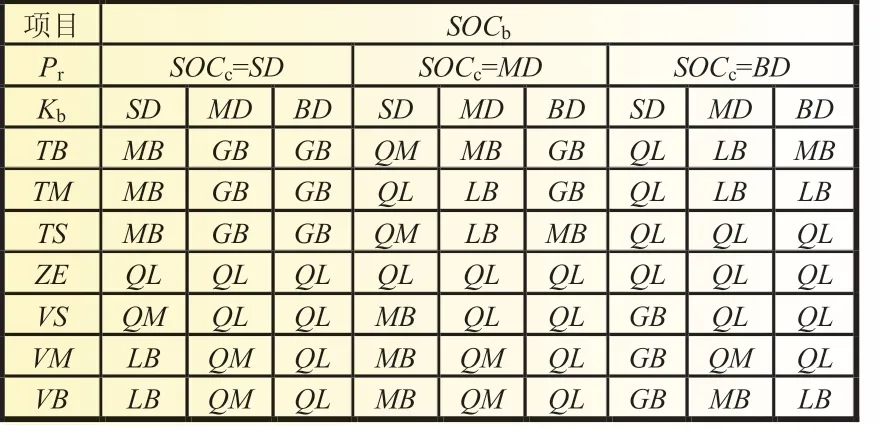
表1 模糊控制规则
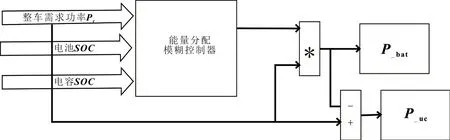
图5 模糊控制策略结构图
2.2.1 驾驶风格识别
驾驶风格分为动力性需求和经济性需求,分别用Power和Ecomic 表示。车辆加速度均值E(a)是某时间片段内对加速度取平均,表征该时间片段内速度的变化率。E(a)越大表征速度变化快,意味着驾驶员需求偏向于动力性;反之,偏向于经济性。若样本中出现具有少数极端值的情况,加速度均值将失去代表性,所以引入汽车加速度均方差σ(a),共同识别驾驶员对车辆动力性或经济性的偏向需求,从而准确地识别驾驶员的驾驶风格。
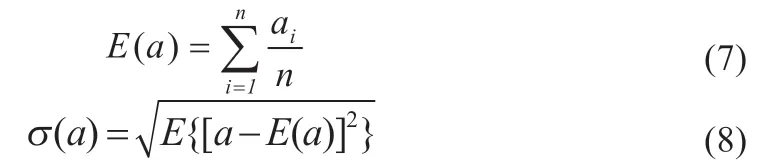
式中:a 为当前加速度采样值;n 为加速度取样个数。
获得识别参数后,对驾驶风格识别的模糊控制器进行设计。其 中 模 糊 输 入 输 出 论 域E(a)=[-1,1],σ(a)=[0,1]、driving_style=[-1,1],所对应的模糊子集为:E(a)={NB、NM、S、PM、PB};σ(a)={S、M、B};driving_style={Economic、Power}。模糊规则的输出界面如图6 所示。
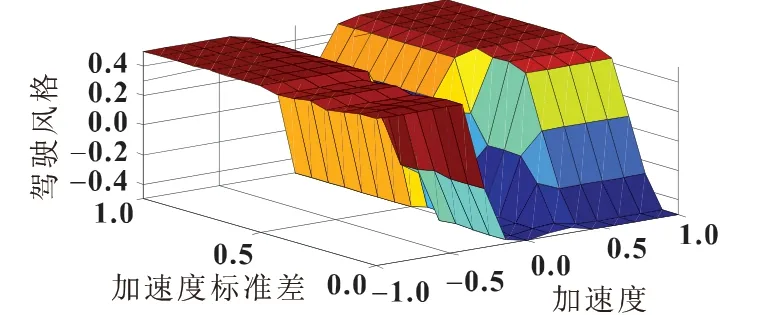
图6 驾驶风格
2.2.2 加速意图识别
通过加速踏板的开度和加速踏板变化率识别加速意图。加速踏板的开度以加速时加速度均值E(a_acc)表征,加速踏板的变化率以加速度冲击影响因子J_fact表征。E(a_acc)且J_fact越大则表示加速意图越强,反之,加速意图越弱,计算公式如式(9)。
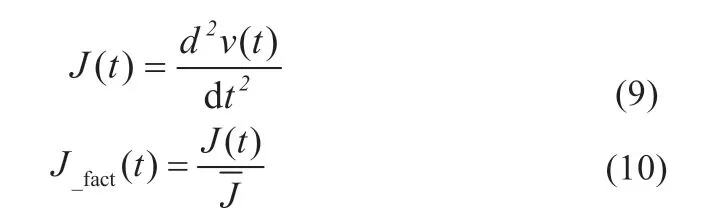
式中:J 加速度冲击系数[9];J 为各种路况下的平均冲击系数。加入J 是因为不同路况下的冲击系数呈现差异化分布,将路况考虑进来,使得冲击影响因子表征加速度冲击程度更具实际含义。经计算,不同工况下平均冲击系数如表2 所示。
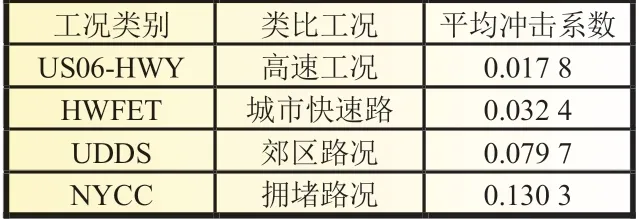
表2 不同工况下平均冲击系数
加速意图模糊识别器的设计中,输入和输出变量的论域为:E(a_acc)=[0,1],J_fact=[0,1],acc_atemp=[0,1];所对应的模糊子集为E(a_acc)={S, M, B}、J_fact={S, PM, PB}、acc_atemp={S, M, B};所用模糊规则的输出界面如图7 所示。
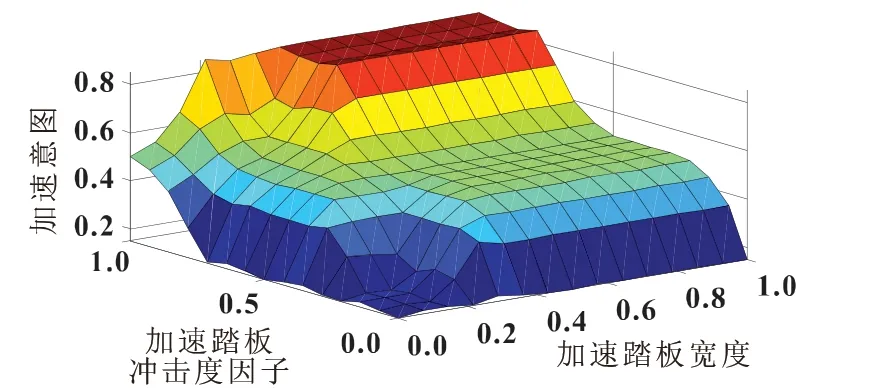
图7 加速意图
2.3 驾驶意图-模糊自适应控制策略的实现
驾驶意图-模糊自适应控制策略的实现思路是:由输入为功率需求、蓄电池SOC、电容SOC 的模糊控制器为主模糊控制器,满足充放电功率主要的期望值;由驾驶意图识别模糊器为副模糊控制器,其输出结果动态修正主能量分配系数。结合多目标优化思路,总能量分配系数为主副模糊控制输出乘权重取和,策略结构图见图8。
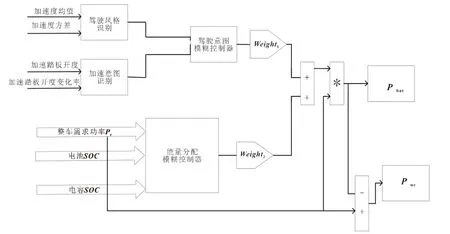
图8 驾驶意图-模糊逻辑自适应控制策略结构图
根据模糊图中控制策略结构图,可得:

式中:Pr为需求功率;K 为能量分配系数。

式中:weight1为驾驶意图权重;weight2为主模糊控制输出权重;k1为驾驶意图识别结果;k2为主模糊控制输出结果。
权重分配目标:延长动力电池的循环寿命,同时考虑车、驾驶意图因素。其中,满足功率需求、SOC 约束、储能装置输出功率限值约束等车的因素是首要的,所以权重系数依次取值为0.7、0.3。
3 仿真结果分析
为验证驾驶意图-模糊自适应控制策略有效性,进行仿真,其中,仿真中的单一电源系统和复合电源系统的整车参数是一致的;模糊控制和驾驶意图-模糊自适应控制策略分别用策略1 和策略2 表示;仿真工况为NEDC 工况。
图9 为策略2 下汽车速度跟随情况。由图可知,实际车速和需求车速能较好跟随,表明策略2 满足行驶功率需求。
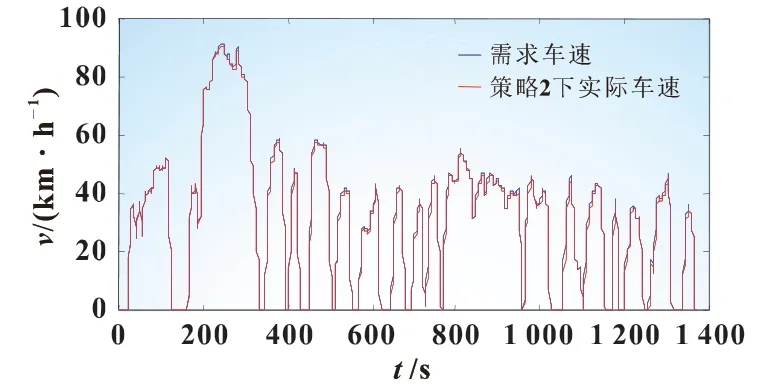
图9 策略速度跟随情况
图10 为蓄电池SOC 变化图。由图可知,策略2 蓄电池SOC 降低最小,策略1 次之,单一电源系统降低最大。进一步计算得图11,较单一电源系统,策略1 能量利用率提高了6.44%,策略2 提高了9.82%。
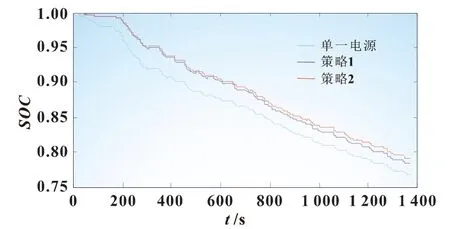
图10 蓄电池SOC变化图
图12 为蓄电池电流变化情况。由图可得,采用策略1 的电池放电电流在118.49 A 以内,采用策略2 时电池的放电电流在100.18 A 以内,降低了15.45%,且两种策略的大部分蓄电池电流均在90 A 以内,避免了大电流对动力电池的冲击。
图13 为蓄电池输出功率变化情况。由图可得,采用策略1 时电池最大正功率33.77 kW,采用策略2 时电池的最大正功率为29.09 kW,降低了13.86%。采用策略1 的电池最大制动回收功率为-7.49 kW,在策略2 下的电池最大制动回收功率为-7.08 kW,降低了5.47%。这表明,策略2 无论在驱动状态还是制动状态均更有效减少蓄电池的功率波动,有利于提高蓄电池的使用寿命。
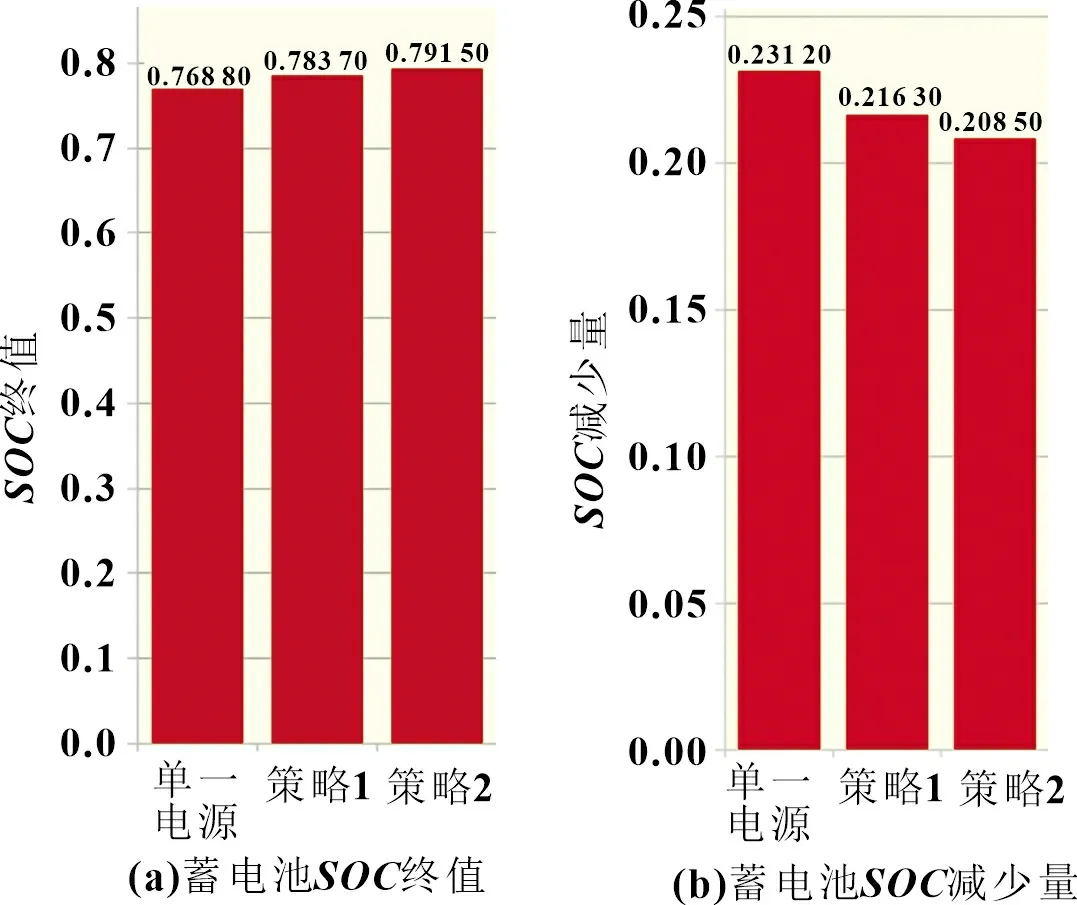
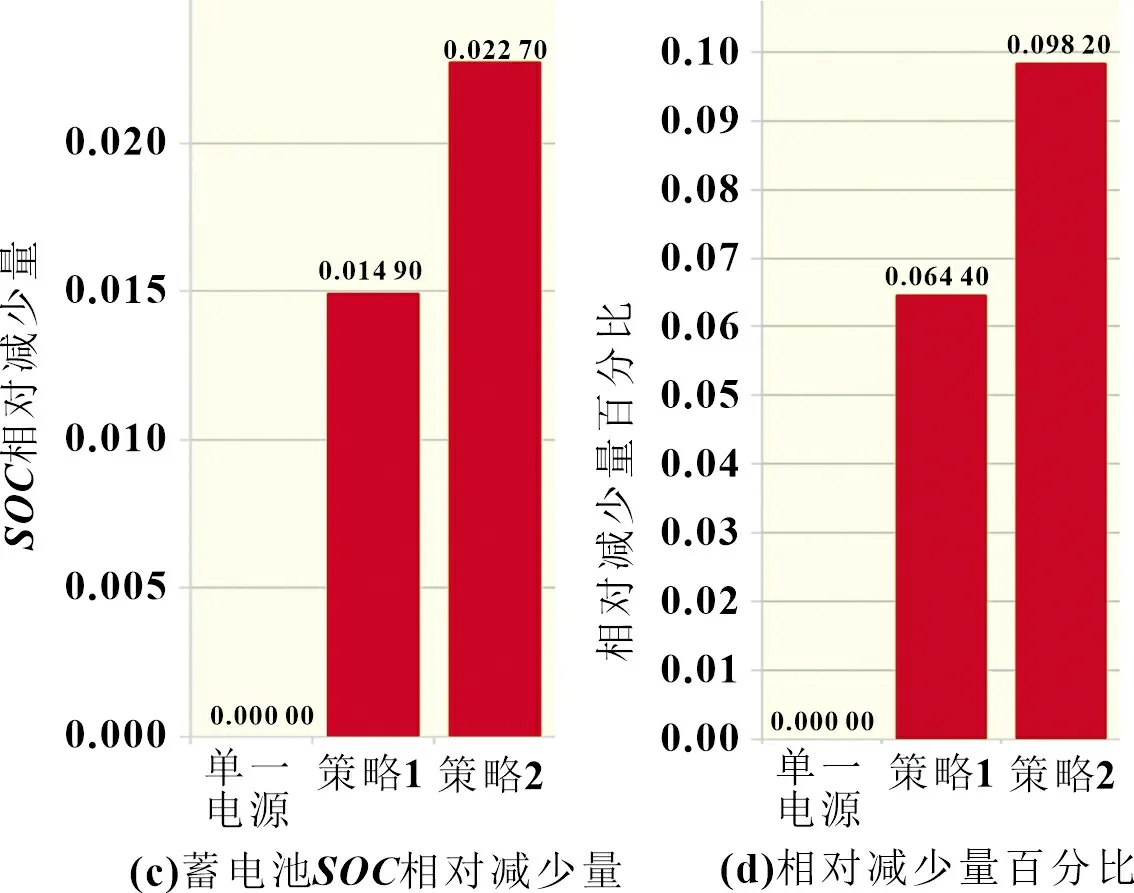
图11 不同ECMS蓄电池能量利用率指标
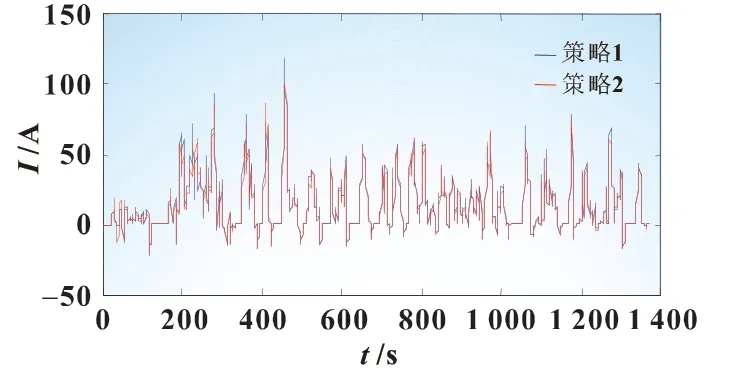
图12 电池电流
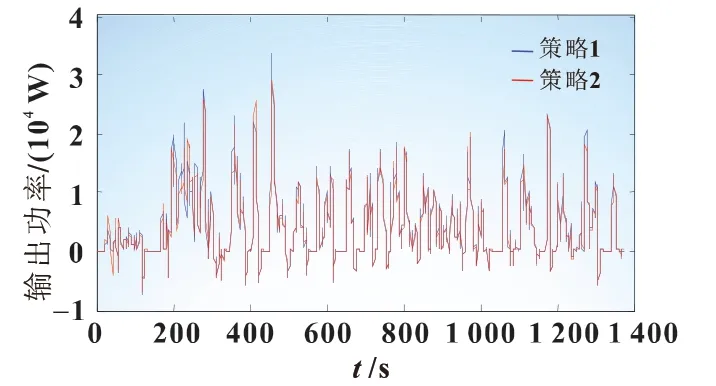
图13 电池功率
图14 为超级电容输出功率、输出电流变化情况。由图可得,与策略1 对比,策略2 下超级电容输出电流、输出功率波动更大。这表明,策略2 较策略1 更能发挥超级电容削峰填谷的优势。
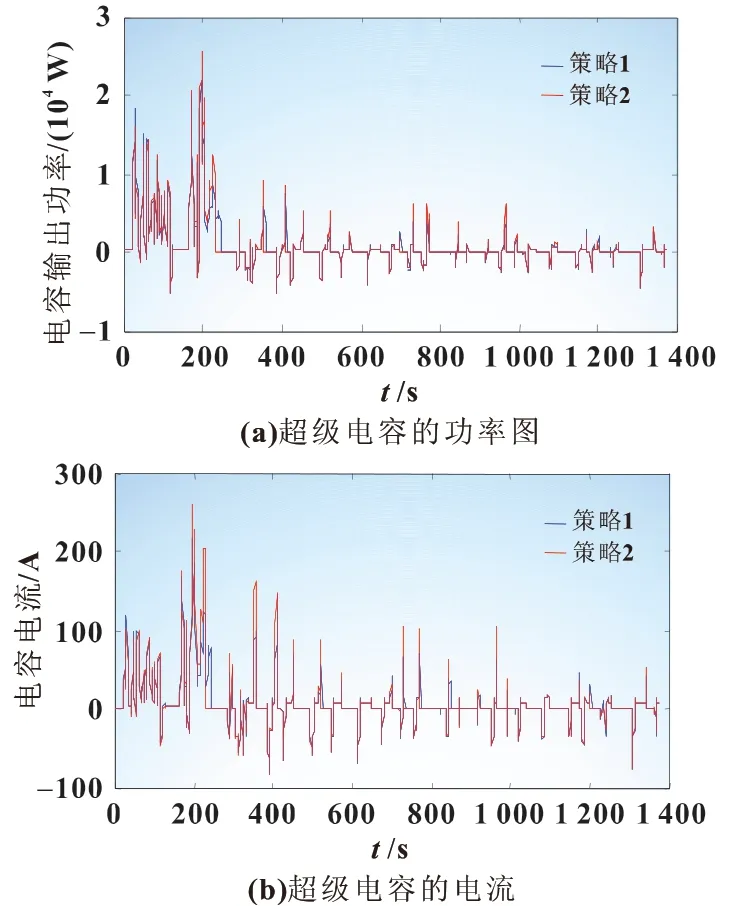
图14 超级电容输出功率、电流变化情况
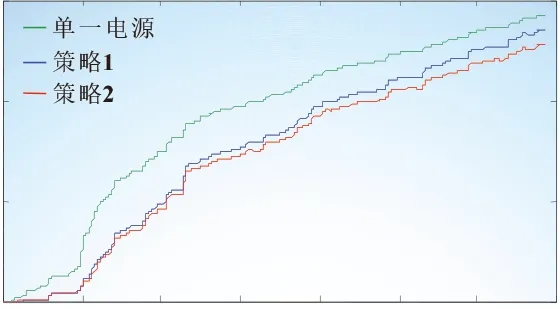
图15 为蓄电池的温升。由图可得,单一电源电池温升最大,为1.43 ℃;策略1 温升次之,为1.35 ℃,降低了5.59%;而策略2 电池温升变化最小,温升为1.28 ℃,降低了10.49%。频繁工作在高温状态下的电池寿命会减少,策略2 较单一电源及策略1,更有助于延长其循环寿命。
?
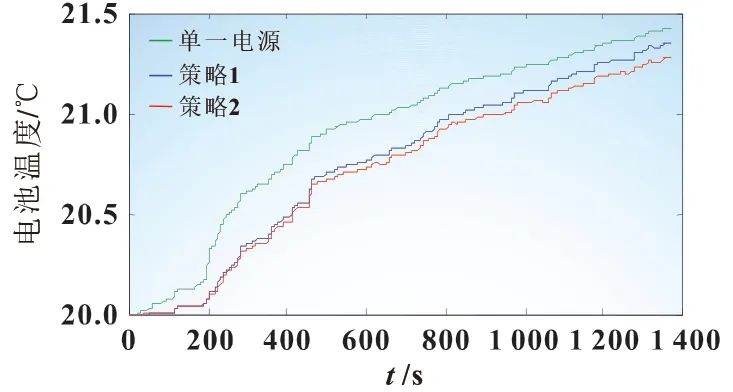
图15 电池温升
4 结论
在确定半主动式复合电源系统拓扑后,建立整车顶层模型。通过Simulink 对路况建模,得到表征参数:加速度均值,加速度标准差,加速度冲击影响因子,设计模糊控制器,进行模糊推理,识别驾驶风格以及加速意图,进而识别出驾驶意图。基于驾驶意图-模糊逻辑自适应控制策略完成仿真,进行仿真对比分析,得如下结论:
(1)在满足整车动力性的前提下,采用驾驶意图-模糊逻辑自适应控制策略能根据表征参数,识别出驾驶意图自适应修正能量分配系数。
(2)复合电源系统能利用超级电容比功率大和可快速充、放电的优势,且结合能量管理策略进行能量分配,可有效提高能量利用率和延长电池寿命。仿真表明,驾驶意图-模糊逻辑自适应控制策略较单一电源系统,能量利用率提高约9.82%,电池温升降低了10.49%。
(3)驾驶意图-模糊逻辑自适应控制策略较传统模糊控制策略的能量利用率提高了约3.61%,蓄电池的功率波动降低了13.86%,蓄电池的最大输出电流降低了15.45%,蓄电池的温升降低了5.19%,这均有利于保护蓄电池,延长寿命,表明该策略的优化有效性。
猜你喜欢
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
法律方法(2021年3期)2021-03-16
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
自动化学报(2016年8期)2016-04-16
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
电源技术(2015年11期)2015-08-22
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23